高過載慣導(dǎo)誤差建模與補(bǔ)償方法
2023-08-12 06:37:12白鉦皓王國棟
導(dǎo)航與控制 2023年3期
關(guān)鍵詞:模型
白鉦皓, 張 琨, 王國棟, 程 玉, 陳 帥
(1. 南京理工大學(xué), 南京 210094; 2. 北京航天控制儀器研究所, 北京 100039)
0 引言
因自主性強(qiáng)、尺寸小、成本低等特點, 微慣性測量單元(Miniature Inertial Measurement Unit,MIMU)被廣泛應(yīng)用于現(xiàn)代軍事領(lǐng)域。 在彈載沖擊環(huán)境下, 慣性器件會受到非常嚴(yán)重的影響, 過載前后的性能(零偏、標(biāo)度因數(shù)等) 很難保持一致[1],由此產(chǎn)生的誤差在慣性導(dǎo)航解算中會迅速積累。因此, 研究過載沖擊對慣性器件的影響十分必要。現(xiàn)有的標(biāo)定模型大多工作在低動態(tài)、低過載環(huán)境下[2], 有學(xué)者在此基礎(chǔ)上建立了導(dǎo)彈過載段的多源誤差模型[3], 主要針對過載段的系統(tǒng)誤差模型進(jìn)行分析。
慣性導(dǎo)航系統(tǒng)的誤差與初始參數(shù)和器件誤差的標(biāo)定精度直接相關(guān), 需對器件誤差進(jìn)行標(biāo)定以保證慣性導(dǎo)航系統(tǒng)的定位精度[4]。 區(qū)別于傳統(tǒng)標(biāo)定方法, 借助于武器平臺的高精度主慣導(dǎo)系統(tǒng)提供的信息, 利用傳遞對準(zhǔn)可實現(xiàn)精確的初始對準(zhǔn)和子慣導(dǎo)系統(tǒng)誤差的估計與補(bǔ)償[5]。 傳遞對準(zhǔn)常用的匹配方式有速度匹配、速度+姿態(tài)匹配等, 在引入姿態(tài)作為觀測量后可以極大縮短對準(zhǔn)時間[6]。 由于GPS 信號易受到干擾, 不能完全依賴GPS 進(jìn)行組合導(dǎo)航, 有學(xué)者針對此問題提出了速度約束和高程約束兩種方法, 提高無衛(wèi)星導(dǎo)航情況下的導(dǎo)航系統(tǒng)能力[7]。 非完整性約束利用載體的側(cè)向和天向速度為零的約束條件對慣導(dǎo)導(dǎo)航誤差進(jìn)行修正,可實現(xiàn)無外部傳感器條件下的自主導(dǎo)航[8]。 目前,純慣性導(dǎo)航的研究都采用較高精度的慣導(dǎo)和自對準(zhǔn)的方式進(jìn)行驗證, 存在慣導(dǎo)成本高昂、自對準(zhǔn)精度低且機(jī)動性差等問題。 因此, 針對低精度慣導(dǎo), 有必要研究一種動基座精確對準(zhǔn)的方法以提高慣導(dǎo)的純慣性導(dǎo)航定位精度。
本文分析了過載沖擊對慣性器件的影響, 建立了沖擊誤差補(bǔ)償模型以實現(xiàn)對慣性器件誤差的補(bǔ)償。 提出了一種傳遞對準(zhǔn)與運(yùn)動約束輔助的導(dǎo)航定位方法, 針對該方法的兩種算法建立了統(tǒng)一的系統(tǒng)模型和不同的觀測模型。 通過半實物仿真驗證該方法的可行性, 實現(xiàn)了慣性傳感器誤差的標(biāo)定與校正, 提高了無衛(wèi)星導(dǎo)航情況下的自主導(dǎo)航定位精度。
1 過載沖擊下的MIMU 誤差建模
1.1 MIMU 誤差分析
目前, 慣性器件一般采用剛體外框架和灌膠封裝實現(xiàn)抗高過載, 當(dāng)慣導(dǎo)受到過載沖擊時可以保證其完好, 但不可避免地會發(fā)生性能參數(shù)(如零偏、標(biāo)度因數(shù)、穩(wěn)定性等)變化[9], 導(dǎo)致慣導(dǎo)的零偏與標(biāo)度因數(shù)相較于沖擊前會產(chǎn)生一定變化, 而靜態(tài)標(biāo)定模型未對其進(jìn)行修正, 造成測量結(jié)果的誤差。
陀螺儀的輸入輸出模型為
式(1)中,F為陀螺儀的輸出,Kg為陀螺儀的標(biāo)度因數(shù),Ωr為陀螺儀的輸入,Kg0為陀螺儀的零偏,v為擬合誤差。 假設(shè)此時標(biāo)度因數(shù)和零偏因陀螺儀受到?jīng)_擊而存在誤差, 則沖擊后的陀螺儀測得的輸出為
式(2)中,Fc為陀螺儀沖擊后的輸出,δKg為沖擊引起陀螺儀的標(biāo)度因數(shù)變化量,δKg0為沖擊后陀螺儀的零偏變化量,vc為擬合誤差。 根據(jù)式(1)所示的陀螺儀輸出模型計算角速度, 并將式(2)帶入式(1)得到陀螺儀的角速度
式(3)中,v1為擬合誤差。 令, 可得陀螺儀受到?jīng)_擊后的輸出誤差模型
式(4)中,δΩc為陀螺儀角速度誤差,δg0為陀螺儀沖擊后的擬合零位變化量。
同理, 加速度計受到?jīng)_擊后的輸出誤差模型為
式(5)中,δfc為加速度計比力誤差,Kf為加速度計的標(biāo)度因數(shù),f為加速度計輸入,δKf、δf0分別為沖擊引起加速度計的標(biāo)度因數(shù)與擬合零位的變化量,v2為擬合誤差。 由式(4)和式(5)可知, 當(dāng)載體受到高過載沖擊時, 標(biāo)度因數(shù)會增大比力和角速度誤差, 使定位精度快速發(fā)散。
1.2 MIMU 誤差補(bǔ)償模型
考慮到MIMU 的零偏誤差、標(biāo)度因數(shù)誤差與安裝誤差, 根據(jù)器件物理特性建立陀螺儀與加速度計的誤差模型[10]。 根據(jù)式(4)和式(5), MIMU 受到過載沖擊后, 標(biāo)度因數(shù)與零偏會發(fā)生變化, 使已有的誤差模型不再完全適用。 對慣性器件沿x軸方向進(jìn)行過載沖擊, 對MIMU 的x軸在不同沖擊下產(chǎn)生的沖擊誤差進(jìn)行建模分析, 慣性器件沿沖擊方向的軸向(x軸)受沖擊作用影響明顯。 利用標(biāo)定模型計算每次沖擊后的各項參數(shù), 利用基于最小二乘法的多項式回歸模型擬合參數(shù)的變化, 多項式如下
式(6)中,s為MIMU 受到的沖擊量級,ai(i=1, 2, …,n)為多項式系數(shù)。 在原有的標(biāo)定模型上, 利用擬合的變化曲線代替原有模型中的部分常值, 構(gòu)建基于沖擊量級的動態(tài)補(bǔ)償模型, 其補(bǔ)償原理如圖1 所示。

圖1 慣性傳感器沖擊補(bǔ)償模型Fig.1 Shock compensation model of inertial sensor
根據(jù)上述補(bǔ)償原理可得新的MIMU 陀螺儀和加速度計的誤差模型, 此處以陀螺儀為例
式(7) 中,W= [WxWyWz]T為MIMU 陀螺儀的實際測量值,fωx(s)、fx(s)為陀螺儀x軸的零偏和標(biāo)度因數(shù)為沖擊量級的函數(shù),ωy0、ωz0為其余兩個軸的零偏,Kωi、Kωij(i=x,y,z;j=x,y,z)分別為陀螺儀的標(biāo)度因數(shù)與安裝誤差系數(shù),ω=[ωxωyωz]T為陀螺儀實際的角速度。
2 MIMU 在線誤差補(bǔ)償與約束
由于微慣性傳感器會存在各種固有誤差, 包括陀螺零偏、加速度計零偏、安裝誤差角等, 導(dǎo)致純慣性導(dǎo)航定位誤差隨時間累積迅速發(fā)散。 傳統(tǒng)的分立式標(biāo)定方法需要對MIMU 進(jìn)行轉(zhuǎn)臺實驗,這既增加了設(shè)備成本, 也不利于現(xiàn)場標(biāo)定的應(yīng)用需求。 通常, 系統(tǒng)模型采用固定誤差會存在較大的剩余誤差, 需要對MIMU 進(jìn)行實時修正。 考慮到系統(tǒng)無外部輔助信息的定位需求, 直接采用慣性導(dǎo)航算法無法有效地抑制系統(tǒng)累積誤差。 針對上述問題, 采用一種傳遞對準(zhǔn)與運(yùn)動學(xué)約束輔助的方法, 既可以實現(xiàn)精確對準(zhǔn)和實時誤差修正, 又能提高無衛(wèi)星導(dǎo)航情況下的純慣性導(dǎo)航定位精度。
2.1 傳遞對準(zhǔn)系統(tǒng)模型
傳遞對準(zhǔn)分為粗對準(zhǔn)和精對準(zhǔn)兩個階段, 粗對準(zhǔn)是將主慣導(dǎo)精確的初始姿態(tài)、位置、速度信息傳遞給子慣導(dǎo), 精對準(zhǔn)是利用Kalman 濾波在線估計子慣導(dǎo)的零偏誤差, 同時對主子慣導(dǎo)桿臂和安裝誤差角進(jìn)行實時估計[11], 選取系統(tǒng)狀態(tài)量為
式(8)中,φ為子慣導(dǎo)姿態(tài)誤差,δvn為速度誤差,εb為子慣導(dǎo)陀螺零偏,Δb為加速度計零偏,μb、lb分別為主子慣導(dǎo)安裝角誤差和桿臂誤差。 本文使用基于地理系(東北天坐標(biāo)系)的慣導(dǎo)系統(tǒng)誤差模型, 結(jié)合捷聯(lián)慣導(dǎo)誤差方程可得系統(tǒng)方程[12]為
建立Kalman 濾波器狀態(tài)方程
式(10) 中,Φ為狀態(tài)轉(zhuǎn)移矩陣,W為系統(tǒng)噪聲矩陣。
根據(jù)文獻(xiàn)[13]構(gòu)建系統(tǒng)量測方程
式(11) 中,V1為量測噪聲,H1為量測矩陣。H1滿足
2.2 運(yùn)動學(xué)約束
定義載體直角坐標(biāo)系m系,y軸指向載體前進(jìn)方向,x軸沿橫軸指向右側(cè),z軸指向載體上方。載體運(yùn)動學(xué)約束條件是指: 載體在運(yùn)動過程中僅有前向動力, 不發(fā)生側(cè)滑和跳躍, 則載體在x軸和z軸的速度分量為零, 即
載體運(yùn)動速度可表示為
對式(14)進(jìn)行全微分, 得到
由式(13)和式(16)可以構(gòu)造運(yùn)動學(xué)約束的量測方程
式(17) 中,V2為量測噪聲,H2為量測矩陣。H2滿足
3 實驗與仿真分析
本次實驗使用了MEA200 高過載慣導(dǎo)作為子慣導(dǎo), 對上文提出的MIMU 沖擊補(bǔ)償模型和傳遞對準(zhǔn)與運(yùn)動學(xué)約束輔助進(jìn)行驗證: 首先, 對子慣導(dǎo)進(jìn)行不同量級的沖擊實驗, 采集慣導(dǎo)數(shù)據(jù)建立沖擊補(bǔ)償模型; 再將高精度組合導(dǎo)航系統(tǒng)安裝在實驗車內(nèi), 用于模擬武器平臺的導(dǎo)航系統(tǒng), 為子慣導(dǎo)提供必要信息; 將子慣導(dǎo)與高精度導(dǎo)航系統(tǒng)安裝在支架上并置于車廂內(nèi), 進(jìn)行跑車實驗并實時采集子慣導(dǎo)和組合導(dǎo)航系統(tǒng)數(shù)據(jù), 利用沖擊補(bǔ)償模型修正子慣導(dǎo)的數(shù)據(jù)信息; 最后, 驗證傳遞對準(zhǔn)與運(yùn)動學(xué)約束輔助方法的有效性。 MIMU 過載沖擊實驗如圖2 所示, 跑車實驗現(xiàn)場裝車如圖3 所示。

圖2 過載沖擊安裝實驗Fig.2 Diagram of overload shock installation experiment
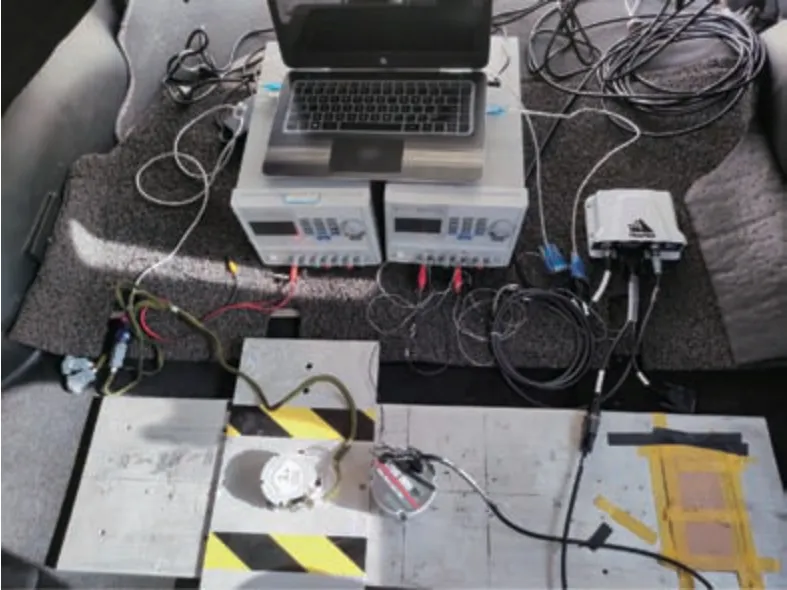
圖3 跑車實驗現(xiàn)場裝車圖Fig.3 Diagram of the vehicle loading in the experiment equipment
3.1 沖擊誤差補(bǔ)償實驗
實驗采用過載沖擊設(shè)備對固定在落臺上的高過載慣導(dǎo)撞擊造成過載沖擊, 沖擊軸向為陀螺儀和加速度計的x軸。 實驗對慣導(dǎo)依次進(jìn)行了2000g~15000g的過載沖擊, 該設(shè)備對慣導(dǎo)施加半正弦波的沖擊, 沖擊整體時間為0.5ms 左右, 每次沖擊前后各采集3 組數(shù)據(jù)并對慣導(dǎo)進(jìn)行性能測試與標(biāo)定。
通過分析不同沖擊量級的慣導(dǎo)數(shù)據(jù), 慣性器件沿沖擊方向的軸向(x軸) 受沖擊作用影響明顯,選取其一組數(shù)據(jù)對陀螺儀和加速度計x軸的零偏與標(biāo)度因數(shù)進(jìn)行多項式擬合。 綜合考慮模型的計算量和準(zhǔn)確性, 采用3 階多項式模型對不同沖擊量級造成的影響進(jìn)行誤差補(bǔ)償。
為驗證沖擊誤差補(bǔ)償模型的效果, 以沖擊后慣導(dǎo)的標(biāo)定結(jié)果為基準(zhǔn), 選擇另外一組數(shù)據(jù)比較慣導(dǎo)受過載沖擊后的前1000 幀輸出數(shù)據(jù)。 在10000g沖擊下, 加速度計x軸沖擊誤差補(bǔ)償曲線如圖4 所示。 不同沖擊量級下, 沖擊誤差補(bǔ)償模型在x軸的補(bǔ)償效果如表1 和表2 所示。 實驗結(jié)果表明, MIMU 在受到10000g、15000g沖擊情況下,相較于未補(bǔ)償情況, 使用沖擊誤差模型補(bǔ)償加速度計和陀螺儀, 其誤差明顯降低。
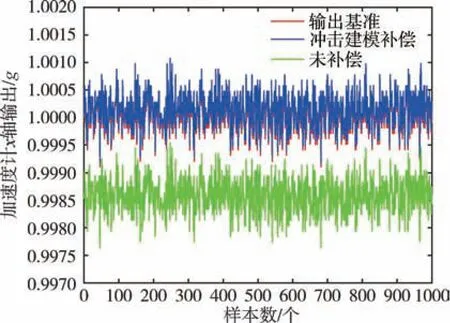
圖4 加速度計x 軸沖擊誤差補(bǔ)償曲線Fig.4 Diagram of accelerometer x-axis shock error compensation curves
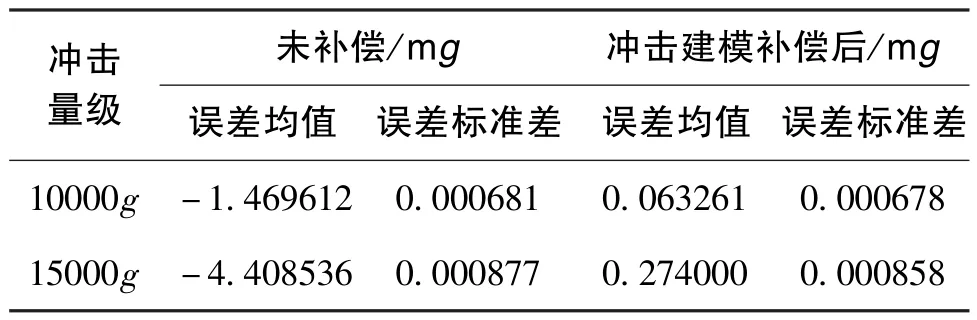
表1 加速度計x 軸沖擊誤差補(bǔ)償對比Table 1 Comparison of accelerometer x-axis shock error compensation
3.2 跑車實驗
跑車實驗地點選在南京市麒麟公園空曠路段,行駛時間約為13min, 前6min 繞圈行駛進(jìn)行主子慣導(dǎo)傳遞對準(zhǔn), 最后在500s 時行駛到指定位置, 停止傳遞對準(zhǔn), 子慣導(dǎo)切換為運(yùn)動學(xué)約束導(dǎo)航行駛3min, 主慣導(dǎo)作為導(dǎo)航基準(zhǔn)進(jìn)行比較, 包含車輛直線行駛的所有狀態(tài), 跑車實驗路線如圖5 所示。

圖5 跑車實驗路線圖Fig.5 Diagram of vehicle experiment route
實驗采用MEA200 作為子慣導(dǎo), 輸出頻率為50Hz, 陀螺儀三軸平均零偏穩(wěn)定性實測優(yōu)于11(°) /h,加速度計零偏穩(wěn)定性為0.1mg。 主慣導(dǎo)采用KVH1750 高精度激光慣導(dǎo), 陀螺儀零偏穩(wěn)定性為0.05(°) /h。 選用NovAtel 公司的PwrPak7 接收機(jī)和KVH1750 慣導(dǎo)作為高精度組合導(dǎo)航系統(tǒng), 其主要性能指標(biāo)如表3 所示。 同時, 采集MIMU 和高精度基準(zhǔn)數(shù)據(jù), 離線進(jìn)行導(dǎo)航算法驗證。
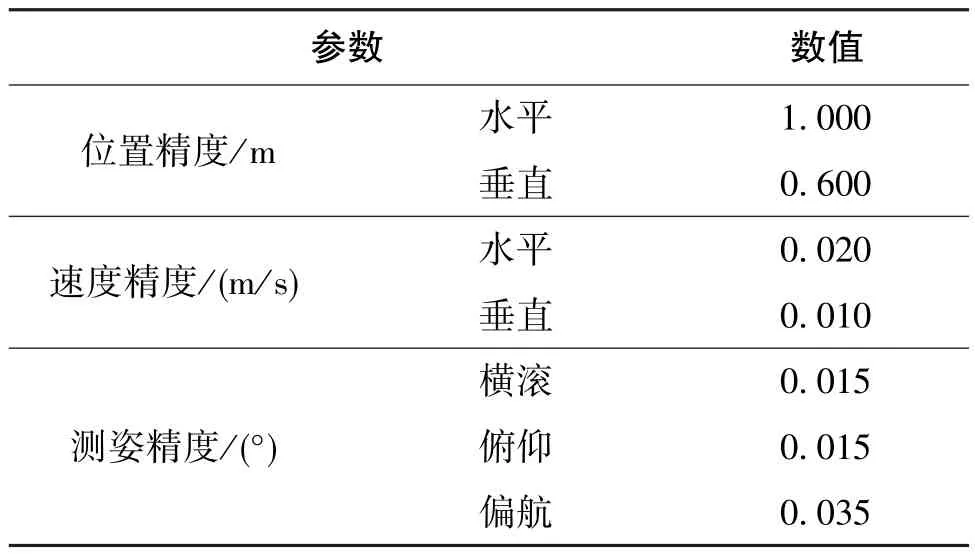
表3 高精度組合導(dǎo)航系統(tǒng)主要性能指標(biāo)Table 3 Main performance indexes of high-precision integrated navigation system
跑車實驗行駛路徑如圖6 所示, 姿態(tài)誤差曲線如圖7 所示。 可以看出, 在行駛過程中主慣導(dǎo)姿態(tài)誤差會影響子慣導(dǎo)誤差估計。 在前6min 內(nèi)繞圈行駛進(jìn)行傳遞對準(zhǔn), 主慣導(dǎo)姿態(tài)存在波動, 因此子慣導(dǎo)姿態(tài)也存在較大波動, 姿態(tài)誤差在0.8°以內(nèi);當(dāng)傳遞對準(zhǔn)完成后, 三個姿態(tài)角全部收斂, 姿態(tài)誤差穩(wěn)定在0.05°以內(nèi)。 圖8 為約束算法速度誤差曲線, 速度誤差在載體運(yùn)動時存在波動, 主要是因為姿態(tài)不準(zhǔn)確造成的。 從500s 開始停止傳遞對準(zhǔn), 之后進(jìn)行運(yùn)動學(xué)約束。 可以看出, 速度誤差逐漸增大且存在一定幅度的波動, 原因是由于載體的前向通道沒有約束。 圖9 為純慣性導(dǎo)航速度誤差曲線, 前500s 與圖8 一致, 存在小范圍波動,之后停止傳遞對準(zhǔn)開始純慣性導(dǎo)航, 則速度誤差相較于圖8 明顯發(fā)散。
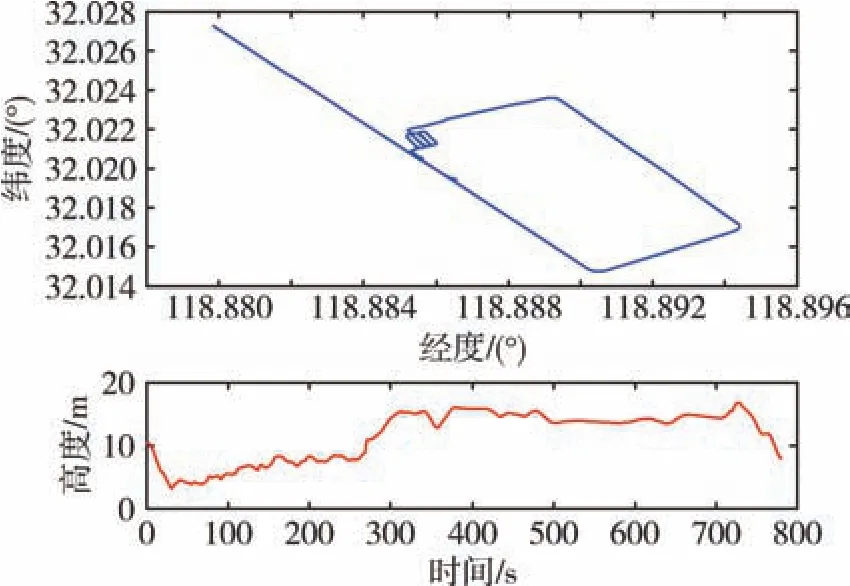
圖6 跑車實驗行駛路徑Fig.6 Driving path of vehicle experiment
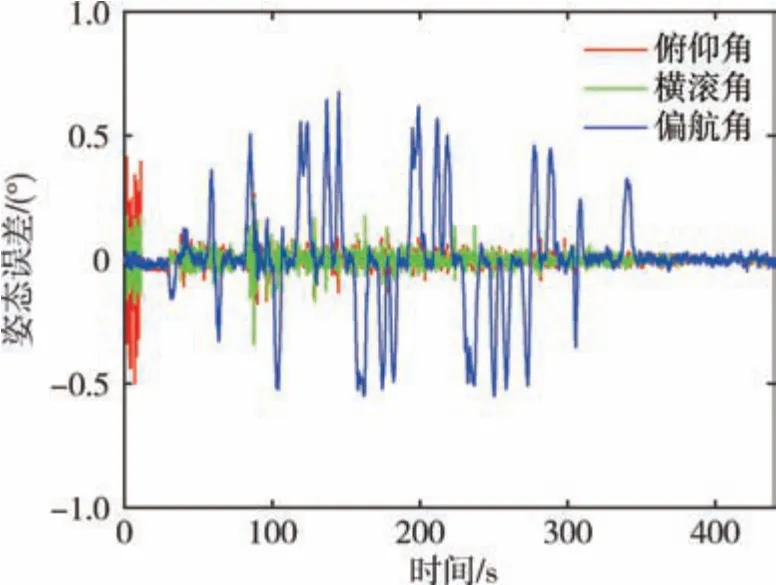
圖7 姿態(tài)誤差曲線Fig.7 Curves of attitude error
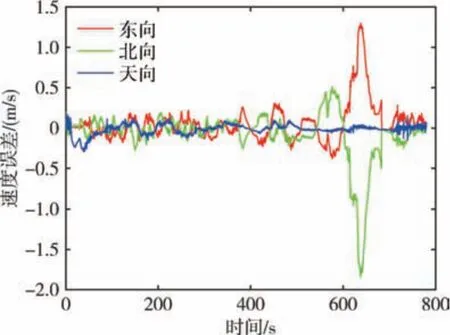
圖8 約束算法速度誤差曲線Fig.8 Speed error curves of constraint algorithm
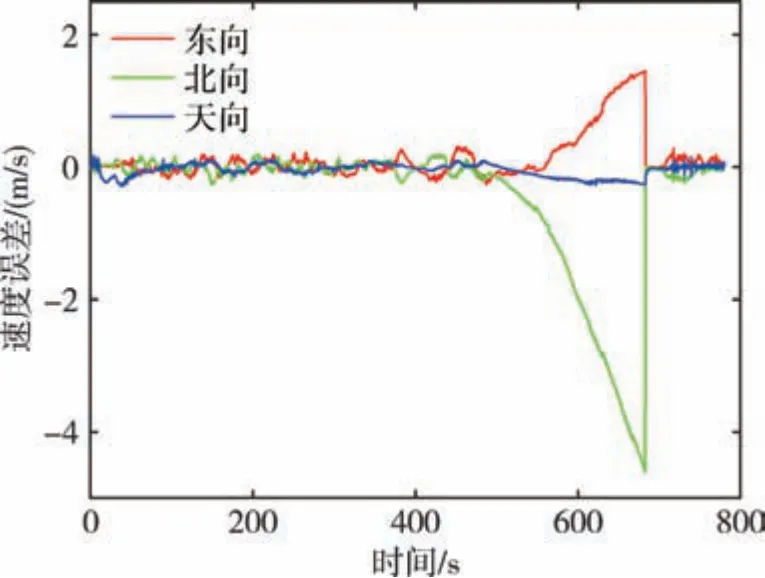
圖9 純慣性導(dǎo)航速度誤差曲線Fig.9 Speed error curves of pure inertial navigation
圖10 為運(yùn)動學(xué)約束輔助下的慣性導(dǎo)航定位誤差, 單向位置誤差小于50m, 由于直線行駛期間偏航角未發(fā)生改變, 前向通道無法約束造成某個方向位置誤差呈現(xiàn)一定累計趨勢。 圖11 給出了純慣性導(dǎo)航定位誤差, 可以看到位置誤差快速積累, 單向位置誤差在350m 以內(nèi), 由于主慣導(dǎo)通過傳遞對準(zhǔn)為子慣導(dǎo)提供了相對準(zhǔn)確的初始姿態(tài), 也使得純慣性導(dǎo)航定位精度得到一定程度的優(yōu)化。 比較圖10 和圖11可知, 采用運(yùn)動學(xué)約束輔助后, 導(dǎo)航定位精度提升了85%, 高度通道的發(fā)散趨勢明顯得到抑制。
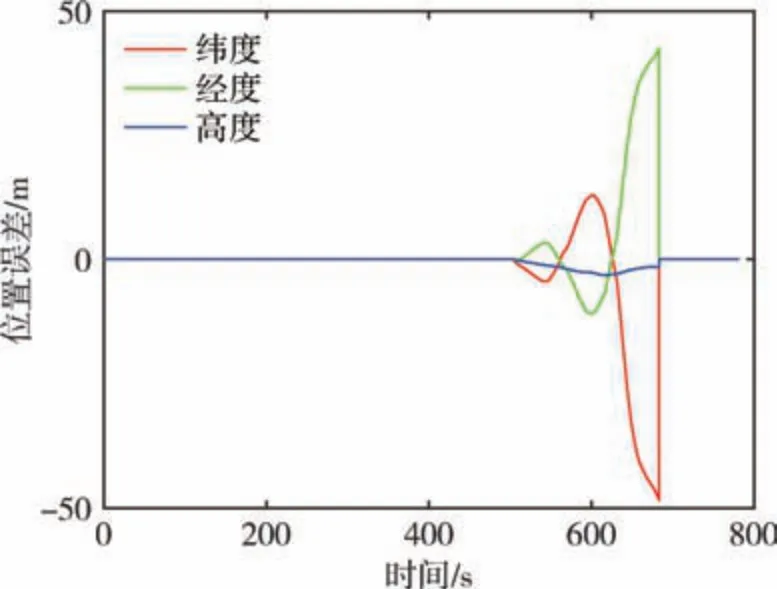
圖10 約束輔助下的慣性導(dǎo)航定位誤差Fig.10 Diagram of inertial navigation positioning error assisted by constraints
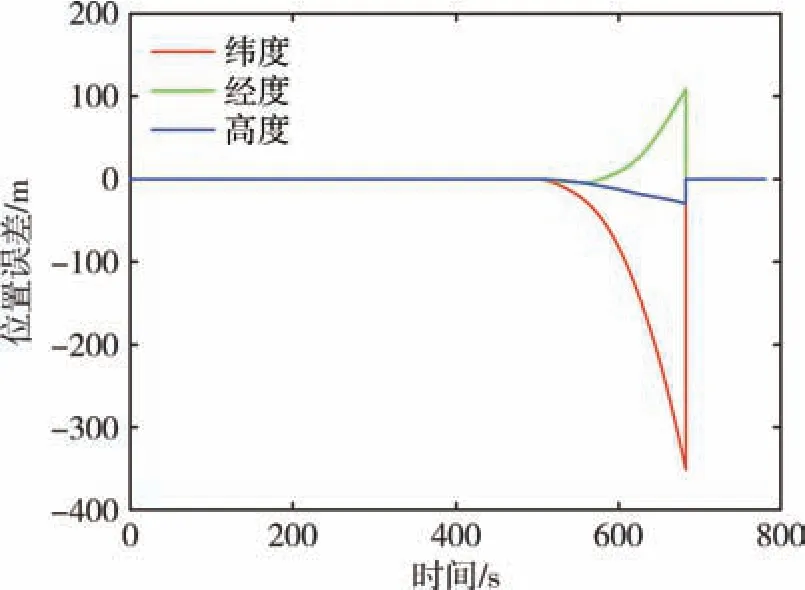
圖11 純慣性導(dǎo)航定位誤差Fig.11 Diagram of pure inertial navigation positioning error
4 結(jié)論
針對高過載慣導(dǎo)受到?jīng)_擊后零偏與標(biāo)度因數(shù)產(chǎn)生一定變化的問題, 本文構(gòu)建了基于沖擊量級的動態(tài)補(bǔ)償模型, 利用擬合參數(shù)動態(tài)調(diào)整MIMU 的誤差模型, 從而減小了加速度計和陀螺儀的誤差。同時, 本文研究了一種傳遞對準(zhǔn)與運(yùn)動學(xué)約束輔助的方法, 可對MIMU 進(jìn)行誤差在線標(biāo)定與約束。仿真結(jié)果表明, 該方法可有效提高系統(tǒng)對準(zhǔn)精度,實時修正系統(tǒng)誤差, 可提高無衛(wèi)星導(dǎo)航情況下的自主導(dǎo)航定位精度。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19