智慧牧場(chǎng)個(gè)性化自動(dòng)飼喂設(shè)備設(shè)計(jì)
2023-08-09 09:20:38閆海鵬陳學(xué)帥
河北工業(yè)科技 2023年4期
閆海鵬,陳學(xué)帥,鄧 飛
(河北科技大學(xué)機(jī)械工程學(xué)院,河北石家莊 050018)
國(guó)外對(duì)奶牛自動(dòng)飼喂設(shè)備的開(kāi)發(fā)研制相對(duì)較早,全混合日糧(total mixed ration,TMR)飼喂是根據(jù)分群奶牛的營(yíng)養(yǎng)需求[1-3],將適量的粗飼料與添加劑按比例均勻攪拌,從而得到營(yíng)養(yǎng)均衡的飼料。優(yōu)質(zhì)的TMR設(shè)備及相應(yīng)的技術(shù)措施,保證了奶牛的每口飼料都具有均衡的營(yíng)養(yǎng)配比。目前,該技術(shù)已被廣泛應(yīng)用于美國(guó)、以色列、意大利、荷蘭等國(guó)家,并逐步在中國(guó)推廣應(yīng)用[4-5]。常見(jiàn)的TMR設(shè)備可根據(jù)其固定方式分為3類(lèi):固定式TMR設(shè)備、牽引式TMR設(shè)備、自走式TMR設(shè)備[6]。20世紀(jì)80年代中后期,北京、上海、河北等地的大型奶牛養(yǎng)殖場(chǎng)采用了TMR飼養(yǎng)技術(shù),但該技術(shù)沒(méi)有得到大規(guī)模的普及。近年來(lái),中國(guó)自主研發(fā)了一些TMR飼喂設(shè)備。戚江濤等[7]、高振江等[8]設(shè)計(jì)了一款自走式精確飼喂設(shè)備,根據(jù)奶牛生理特征來(lái)實(shí)現(xiàn)對(duì)不同生理周期的奶牛進(jìn)行精準(zhǔn)飼喂。熊本海等[9]研發(fā)了一款奶牛個(gè)體自動(dòng)飼喂設(shè)備,可以全面、動(dòng)態(tài)、系統(tǒng)性地監(jiān)測(cè)奶牛采食過(guò)程,但是只能進(jìn)行單側(cè)飼喂。而趙清來(lái)等[10]、趙麗萍等[11]針對(duì)中國(guó)當(dāng)下奶牛單產(chǎn)水平偏低的情況,設(shè)計(jì)了一種兩側(cè)變量飼喂設(shè)備,提高了飼料飼喂的智能和效率,但針對(duì)的是TMR混合飼料,缺乏對(duì)不同奶牛精飼料的補(bǔ)飼。
TMR飼喂技術(shù)存在一定缺陷,無(wú)法按奶牛的個(gè)體差異喂養(yǎng)。泌乳期奶牛對(duì)精飼料的需求量大,采用TMR飼喂技術(shù)易因喂養(yǎng)不足,而影響奶牛的產(chǎn)奶率。國(guó)外研發(fā)出的機(jī)器人已應(yīng)用到畜牧養(yǎng)殖業(yè),但這些設(shè)備進(jìn)口成本過(guò)高且不便維護(hù),無(wú)法在中小型企業(yè)或個(gè)體農(nóng)戶中普及。精飼料補(bǔ)飼的傳統(tǒng)方法是人工喂養(yǎng),需耗費(fèi)大量的人力和時(shí)間。本文采用TMR技術(shù)和精飼料補(bǔ)飼集成一體化的思路,設(shè)計(jì)了智慧牧場(chǎng)個(gè)性化自動(dòng)飼喂設(shè)備。該設(shè)備具有通用性好、自動(dòng)化程度高、定量飼喂控制準(zhǔn)確、安裝成本低廉等優(yōu)點(diǎn),不僅降低了相關(guān)企業(yè)的養(yǎng)殖和管理成本,而且提高了企業(yè)的自動(dòng)化管理水平。
1 飼喂設(shè)備總體結(jié)構(gòu)及工作原理
智慧牧場(chǎng)個(gè)性化自動(dòng)飼喂設(shè)備結(jié)構(gòu)如圖1所示,其包括行走機(jī)構(gòu)、回轉(zhuǎn)機(jī)構(gòu)、下料機(jī)構(gòu)、機(jī)架、螺旋輸送機(jī)構(gòu)、精飼料倉(cāng)、全混合日料倉(cāng)、攪拌機(jī)構(gòu)、無(wú)線射頻裝置。攪拌機(jī)構(gòu)在全混合日料倉(cāng)內(nèi),螺旋輸送機(jī)構(gòu)分別布置在全混合日料倉(cāng)和精飼料倉(cāng)內(nèi)底部,下料機(jī)構(gòu)布置在精飼料輸送機(jī)構(gòu)出料口正下方。精飼料倉(cāng)和下方螺旋輸送機(jī)構(gòu)以及下料機(jī)構(gòu)組成精飼料精確定量補(bǔ)飼裝置。該設(shè)備的工作原理是2個(gè)料倉(cāng)和機(jī)架固定在支撐板上通過(guò)回轉(zhuǎn)機(jī)構(gòu)做圓周運(yùn)動(dòng),回轉(zhuǎn)機(jī)構(gòu)固定在行走機(jī)構(gòu)上方,整體進(jìn)行前后位移。
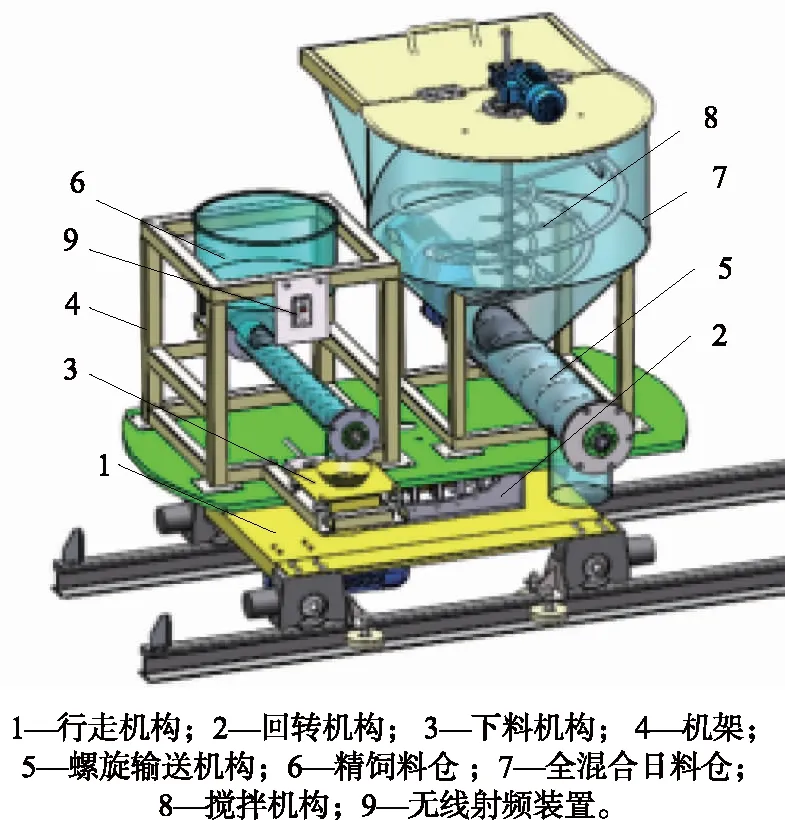
圖1 自動(dòng)投喂設(shè)備的總體結(jié)構(gòu)圖Fig. 1 Overall structure diagram of automatic feeding equipment
飼喂設(shè)備在奶牛采食區(qū)進(jìn)行飼喂,利用無(wú)線射頻技術(shù),可以對(duì)奶牛群體狀態(tài)展開(kāi)實(shí)時(shí)監(jiān)測(cè),并及時(shí)準(zhǔn)確地采集電子標(biāo)記記錄下的各種數(shù)據(jù)信息。無(wú)線射頻系統(tǒng)能夠動(dòng)態(tài)識(shí)別并記錄奶牛的體重、采食量、運(yùn)動(dòng)量等數(shù)據(jù)。該系統(tǒng)與各個(gè)養(yǎng)殖模塊的其他傳感器相結(jié)合,可以將奶牛的體況、牛場(chǎng)環(huán)境的溫度、濕度等信息詳細(xì)記錄。在計(jì)算機(jī)終端上動(dòng)態(tài)地監(jiān)測(cè)奶牛的身體狀況,若系統(tǒng)采集的數(shù)據(jù)超過(guò)了計(jì)算機(jī)中設(shè)置的健康預(yù)警范圍,管理系統(tǒng)就可以自動(dòng)識(shí)別,并進(jìn)行實(shí)時(shí)反饋。無(wú)線射頻系統(tǒng)為管理者判斷奶牛的生理狀況,調(diào)整飼料結(jié)構(gòu)和供給數(shù)量,為制定相應(yīng)的處理方案提供依據(jù)。
攪拌機(jī)構(gòu)主要由軸端擋圈、軸承、上法蘭、減速器、攪拌器、下法蘭、套筒、電機(jī)組成。該機(jī)構(gòu)工作時(shí),電機(jī)通過(guò)減速器帶動(dòng)攪拌軸以及固定在軸上的螺帶式攪拌器順時(shí)針轉(zhuǎn)動(dòng),一段時(shí)間后,將電機(jī)反轉(zhuǎn),對(duì)倉(cāng)內(nèi)飼料充分均勻攪拌。攪拌機(jī)構(gòu)如圖2所示。
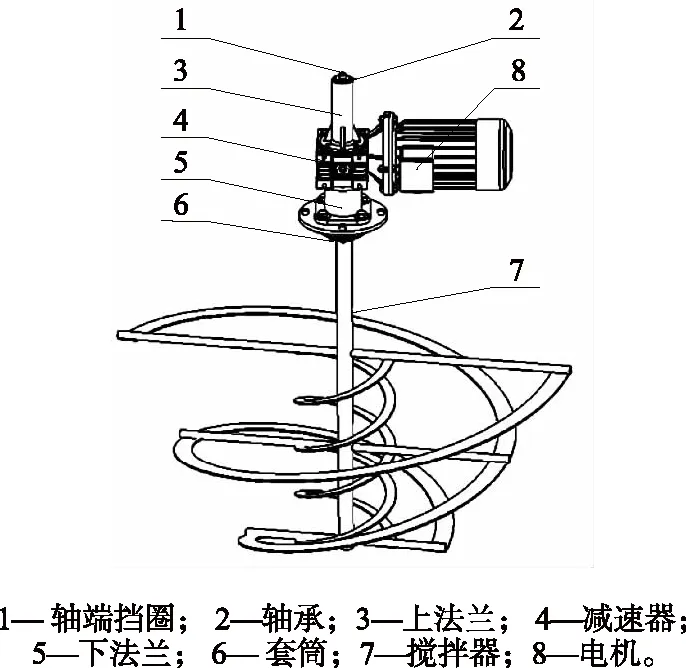
圖2 攪拌機(jī)構(gòu)圖Fig.2 Mixing device diagram
螺旋輸送機(jī)構(gòu)由電機(jī)、減速器、聯(lián)軸器、螺旋輸送器組成。全混合日料倉(cāng)、精飼料倉(cāng)下都裝有該機(jī)構(gòu),其工作時(shí)電機(jī)通過(guò)減速器帶動(dòng)螺旋桿轉(zhuǎn)動(dòng)。對(duì)于全混合日料倉(cāng),電機(jī)勻速給料。精飼料倉(cāng)按照不同時(shí)期奶牛對(duì)精飼料的不同需求進(jìn)行精確定量飼喂,由步進(jìn)電機(jī)通過(guò)脈沖頻率進(jìn)行調(diào)速進(jìn)給,螺旋葉片直徑計(jì)算公式如式(1)所示:
(1)
式中:D為螺旋葉片的直徑,m;Q為螺旋輸送機(jī)構(gòu)的生產(chǎn)量,kg/h;φ為充填系數(shù);ρ為物料的密度,kg/m3;C為傾斜安裝時(shí)的修正系數(shù);k為物料綜合系數(shù)。
該裝置水平放置,故修正系數(shù)C=1, TMR混合輸送機(jī)構(gòu)中生產(chǎn)量Q1=3.32 kg/h,φ=0.4,ρ=0.3 kg/m3,k=0.055 8,代入式(1),TMR混合輸送螺旋葉片直徑D1=210 mm;精飼料輸送機(jī)構(gòu)中生產(chǎn)量Q2=1.11 kg/h,φ=0.4,ρ=0.7 kg/m3,k=0.055 8,代入公式(1),則精飼料輸送螺旋葉片D2=97 mm,將計(jì)算出的葉片直徑圓整至標(biāo)準(zhǔn)直徑,如圓整后的80,90,100,110,圓整后D2=100 mm。 螺距S按照式(2)計(jì)算:
S=k1D。
(2)
由式(2)得出螺旋葉片螺距S1=168 mm,S2=80 mm。螺旋桿直徑d如式(3)所示計(jì)算:
d=(0.2~0.35)D。
(3)
由式(3)得出螺旋桿直徑d1=50 mm,d2=30 mm。螺旋軸實(shí)際轉(zhuǎn)速n如式(4)所示計(jì)算:
(4)
由式(4)得出TMR混合飼料輸送機(jī)的有效實(shí)際速度為80 r/min,精飼料輸送機(jī)構(gòu)的有效實(shí)際速度為105 r/min。螺旋輸送器的尺寸參數(shù)如圖3所示。
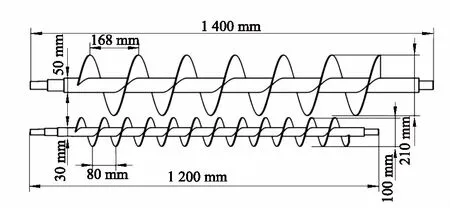
圖3 螺旋輸送器尺寸參數(shù)圖Fig.3 Parameter diagram of auger size
回轉(zhuǎn)機(jī)構(gòu)由連接板、回轉(zhuǎn)支承、支撐板、電機(jī)、減速器、小齒輪、大齒輪、固定塊、外殼、彈簧、活塞桿、上連接套、回轉(zhuǎn)軸、下連接套、圓螺母組成。該機(jī)構(gòu)運(yùn)轉(zhuǎn)時(shí),電機(jī)得電通過(guò)減速器輸出軸帶動(dòng)小齒輪轉(zhuǎn)動(dòng),與小齒輪相嚙合的大齒輪產(chǎn)生相對(duì)運(yùn)動(dòng),使連接板上的飼料模塊旋轉(zhuǎn)180°,從而達(dá)到采食區(qū)的雙側(cè)喂食。由固定塊、彈簧、外殼、活塞桿組成的彈簧減振裝置位于回轉(zhuǎn)支承下方,連接板固定在回轉(zhuǎn)支承上方,在一定載荷作用下,彈簧處于按壓狀態(tài)對(duì)整個(gè)機(jī)構(gòu)起到緩沖減震的作用,回轉(zhuǎn)機(jī)構(gòu)如圖4所示。
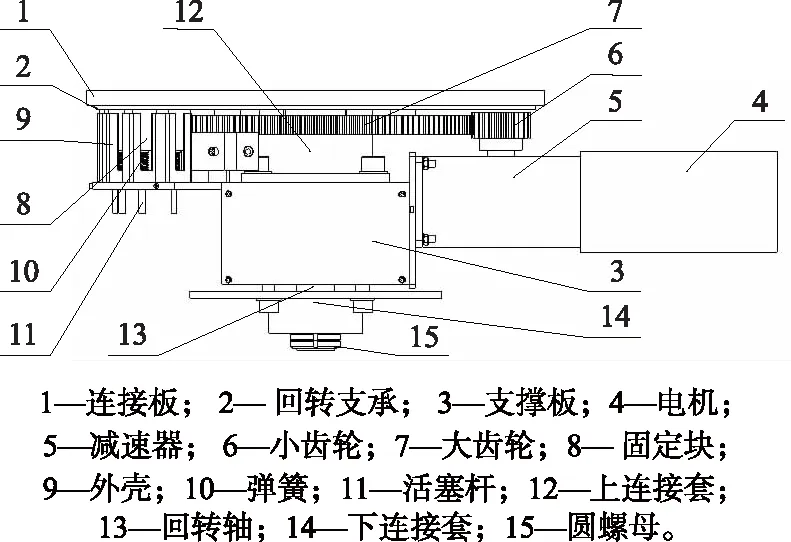
圖4 回轉(zhuǎn)機(jī)構(gòu)圖Fig.4 Diagram of slewing mechanism
在無(wú)線射頻裝置中掃描到電子耳標(biāo)號(hào),并于數(shù)據(jù)庫(kù)中進(jìn)行身份信息比對(duì),得到奶牛的生命周期、體重及產(chǎn)奶量等信息,通過(guò)計(jì)算判斷奶牛是否需要精飼料的補(bǔ)飼。上位機(jī)給PLC下達(dá)控制指令,PLC控制精飼料輸送機(jī)構(gòu),將飼料輸送至下料機(jī)構(gòu)。下料機(jī)構(gòu)由支撐架、氣缸、插板、頂板、料斗、稱重傳感器組成。飼料由進(jìn)料口落入料斗內(nèi)部的插板上,在料斗四角下方裝有稱重傳感器,用于動(dòng)態(tài)稱重。當(dāng)料斗中的飼料量達(dá)到所需投放飼料量的80%時(shí),步進(jìn)電機(jī)減速,緩慢減少下料。當(dāng)達(dá)到投放飼料量的100%時(shí),氣缸收縮并帶動(dòng)插板,停止下料,飼料下放。延時(shí)幾秒,氣缸復(fù)位,下料機(jī)構(gòu)如圖5所示。
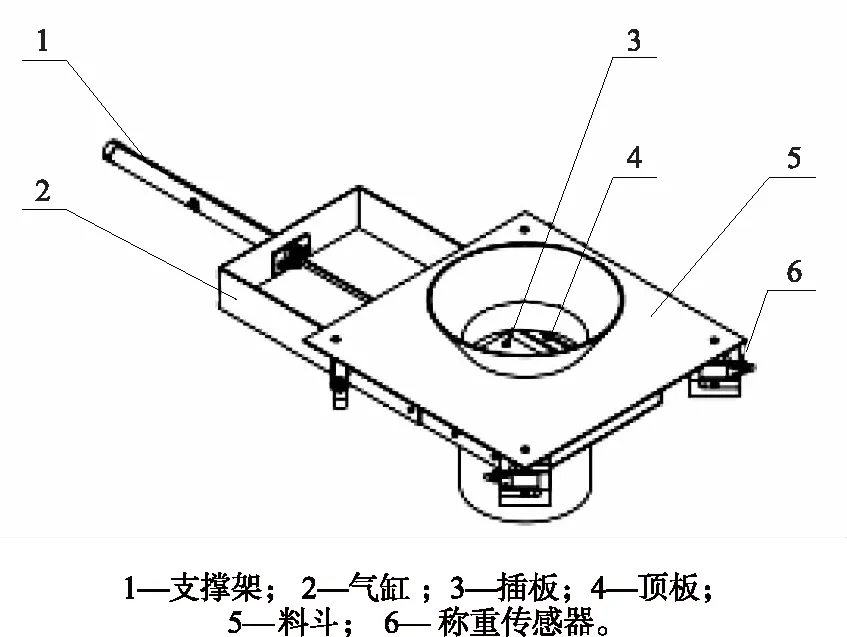
圖5 下料機(jī)構(gòu)圖Fig.5 Diagram of blanking mechanism
2 控制系統(tǒng)及程序設(shè)計(jì)
2.1 控制系統(tǒng)總體方案
混合飼料輸送機(jī)構(gòu)和回轉(zhuǎn)機(jī)構(gòu)由電機(jī)控制,攪拌機(jī)構(gòu)通過(guò)電機(jī)正反轉(zhuǎn)來(lái)實(shí)現(xiàn)混合飼料的充分?jǐn)嚢琛4送?為了實(shí)現(xiàn)低速平穩(wěn)控制電動(dòng)機(jī)的起停,還設(shè)計(jì)了相應(yīng)的控制程序,方便 PC端對(duì) PLC輸出的脈沖、方向信號(hào)進(jìn)行控制,并由驅(qū)動(dòng)器對(duì)步進(jìn)電動(dòng)機(jī)進(jìn)行操作,來(lái)實(shí)現(xiàn)行走和精飼料輸送的位置控制。下料機(jī)構(gòu)采用氣缸控制。同時(shí),為便于操作人員對(duì)設(shè)備的運(yùn)行狀況進(jìn)行維護(hù)和監(jiān)測(cè),使用人機(jī)交互界面實(shí)現(xiàn)人機(jī)配合,使其更加直觀,PLC系統(tǒng)框架如圖6所示。
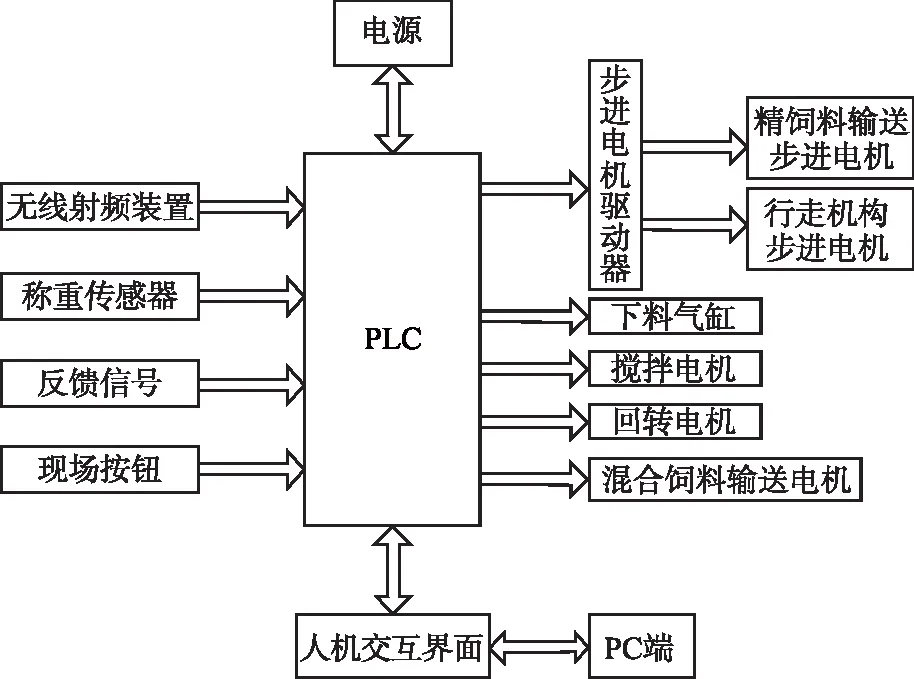
圖6 PLC系統(tǒng)框架Fig.6 PLC system framework
2.2 PLC選型與I/O分配
個(gè)性化自動(dòng)飼喂設(shè)備采用西門(mén)子S7-200系列 PLC為核心,具有抗干擾性好、維護(hù)簡(jiǎn)單、成本低、指令功能強(qiáng)等優(yōu)點(diǎn)。PLC可分為晶體管輸出和繼電器輸出,晶體管輸出的PLC具有使用壽命長(zhǎng)、驅(qū)動(dòng)電流較低、響應(yīng)速度快等特點(diǎn),適用于控制步進(jìn)驅(qū)動(dòng)器頻率較高的場(chǎng)合[12]。考慮到此設(shè)備需要高脈沖頻率,選取晶體管輸出的PLC。根據(jù)控制需求,所選取PLC需配備12個(gè)輸入端口和9個(gè)輸出端口,故選用S7-200系列CPU224晶體管輸出,其具有14個(gè)輸入端口和10個(gè)輸出端口。輸入輸出端口和執(zhí)行功能見(jiàn)表1、表2。
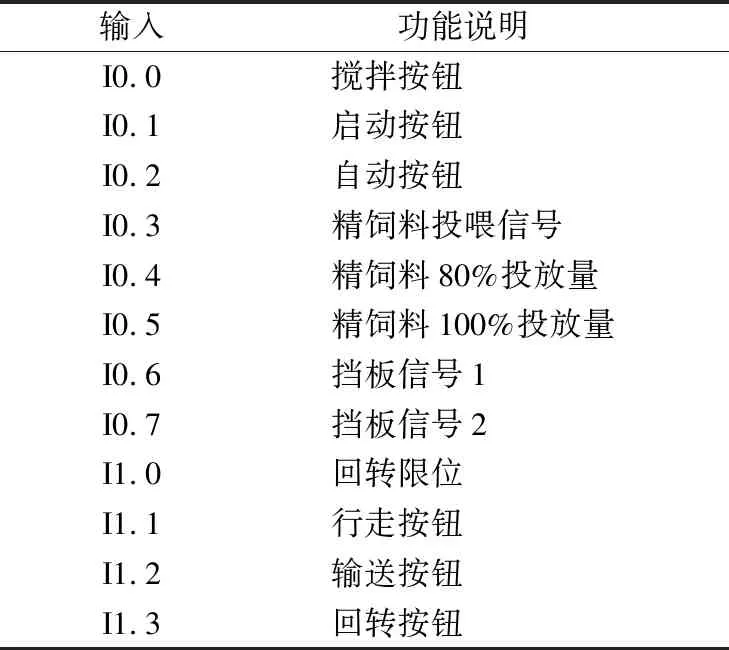
表1 輸入端口的PLC I/O地址分配
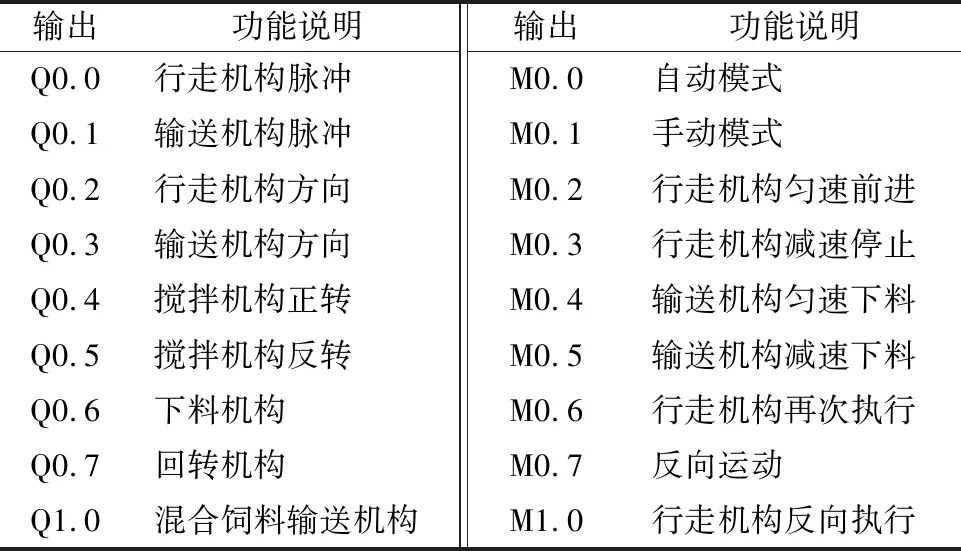
表2 輸出端口的PLC I/O地址分配
2.3 控制流程與程序設(shè)計(jì)
PLC的控制程序采用了序列化的方法,也就是按照預(yù)先設(shè)定的步驟,分步實(shí)施,每一步觸發(fā)的動(dòng)作和實(shí)現(xiàn)的功能,均用流程圖表示,如圖7所示。再依據(jù)流程圖編寫(xiě)PLC的順序功能圖來(lái)表達(dá)程序的設(shè)計(jì)思想,如圖8所示,然后將其轉(zhuǎn)化為梯形圖程序,這是梯形圖編程的基本依據(jù)[13],其硬件接線圖如圖9所示。
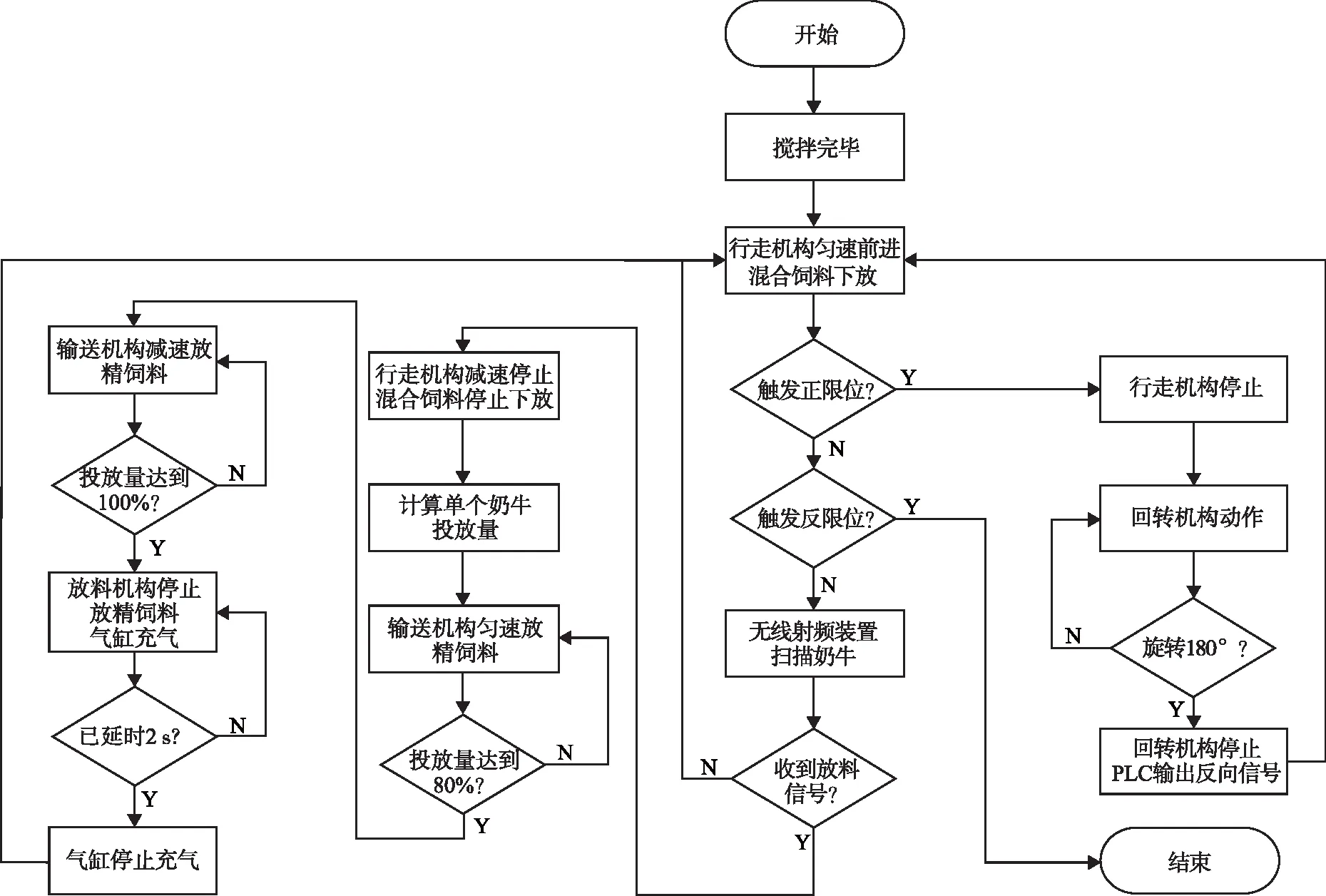
圖7 PLC控制流程圖Fig.7 PLC control flow chart
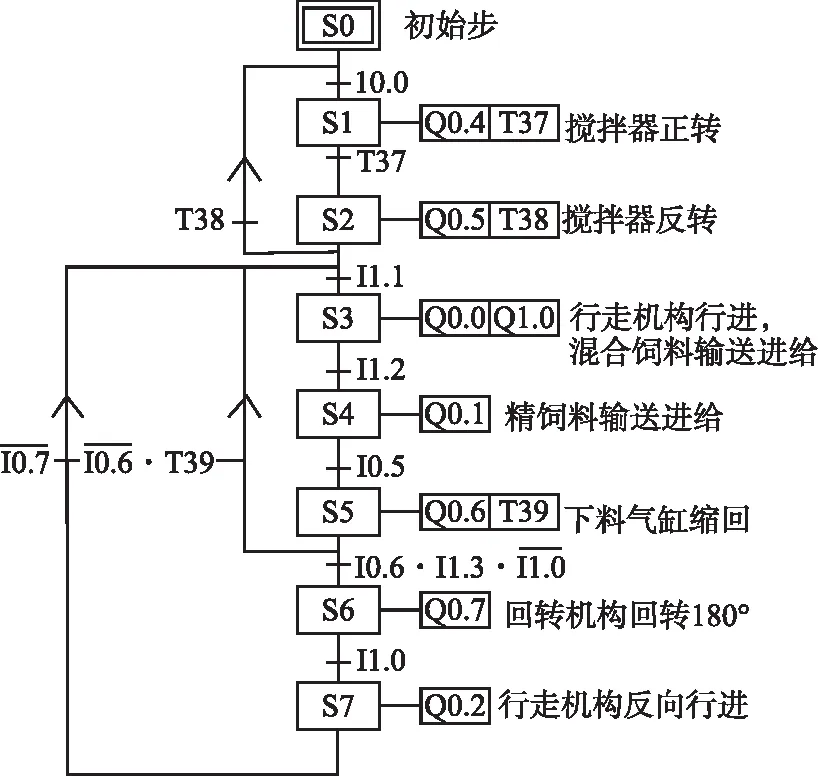
圖8 控制程序順序功能圖Fig.8 Sequence function diagram of control program

圖9 硬件接線圖Fig.9 Hardware wiring diagram
自動(dòng)模式按下啟動(dòng)按鈕,攪拌器攪拌。待攪拌完成后,行走機(jī)構(gòu)勻速行進(jìn),同時(shí)混合飼料下放,下放過(guò)程中,檢測(cè)行走機(jī)構(gòu)是否觸發(fā)正反限位,若不觸發(fā)正反限位,行走機(jī)構(gòu)繼續(xù)前進(jìn);若觸發(fā)正反限位,行走機(jī)構(gòu)停止。停止后回轉(zhuǎn)機(jī)構(gòu)開(kāi)始運(yùn)轉(zhuǎn),檢測(cè)回轉(zhuǎn)機(jī)構(gòu)是否旋轉(zhuǎn)180°,未達(dá)到繼續(xù)旋轉(zhuǎn),到達(dá)則停止旋轉(zhuǎn)。PLC輸出反向信號(hào),行走機(jī)構(gòu)進(jìn)行反向運(yùn)動(dòng)。無(wú)線射頻裝置掃描奶牛,檢測(cè)是否收到放料信號(hào),沒(méi)有收到,繼續(xù)前進(jìn);收到后,行走機(jī)構(gòu)減速停止。混合飼料停止下放的同時(shí),PC端開(kāi)始計(jì)算單個(gè)奶牛所需投放量,螺旋輸送機(jī)構(gòu)勻速投放精飼料,若到達(dá)80%后開(kāi)始減速放料,當(dāng)達(dá)到100%時(shí),放料機(jī)構(gòu)停止投放精飼料,此時(shí)氣缸充氣插板收縮,飼料下放,待延時(shí)2 s后,氣缸復(fù)位停止充氣。
2.4 人機(jī)交互界面設(shè)計(jì)
系統(tǒng)人機(jī)交互界面采用組態(tài)王監(jiān)控軟件開(kāi)發(fā)設(shè)計(jì),能很容易地通過(guò)通信接口來(lái)完成 OPC協(xié)議和PLC的通信。通過(guò)定義屬性變量將電機(jī)、按鈕、運(yùn)行信號(hào)燈等圖片和控件添加到屏幕中[14]。飼喂控制系統(tǒng)界面包括手動(dòng)模式和自動(dòng)模式。當(dāng)點(diǎn)擊啟動(dòng)按鈕,手動(dòng)模式指示燈亮起操作狀態(tài)為手動(dòng)模式,再次點(diǎn)擊自動(dòng)按鈕,自動(dòng)模式指示燈亮起操作狀態(tài)為自動(dòng)模式;在手動(dòng)模式下,按下行走按鈕,行走機(jī)構(gòu)和混合飼料輸送機(jī)構(gòu)同時(shí)工作,無(wú)線射頻裝置監(jiān)測(cè)到奶牛需要精飼料補(bǔ)飼,反饋信號(hào)傳給PLC,PLC發(fā)出投放信號(hào)指令。攪拌按鈕、回轉(zhuǎn)按鈕、輸送按鈕分別對(duì)應(yīng)攪拌機(jī)構(gòu)、回轉(zhuǎn)機(jī)構(gòu)、精飼料輸送機(jī)構(gòu)的啟動(dòng)與停止。當(dāng)輸送機(jī)構(gòu)和行走機(jī)構(gòu)運(yùn)行時(shí),脈沖輸出指示燈亮起,根據(jù)實(shí)際工況對(duì)其進(jìn)行調(diào)速,當(dāng)按下80%按鈕,輸送機(jī)構(gòu)減速放料;按下100%按鈕輸送機(jī)構(gòu)停止,同時(shí)下料機(jī)構(gòu)運(yùn)行開(kāi)始落料。當(dāng)設(shè)備觸發(fā)正限位回轉(zhuǎn)后,反向投放中指示燈亮起,設(shè)備反向喂料。開(kāi)發(fā)的飼料投放控制系統(tǒng)人機(jī)交互界面如圖10所示。
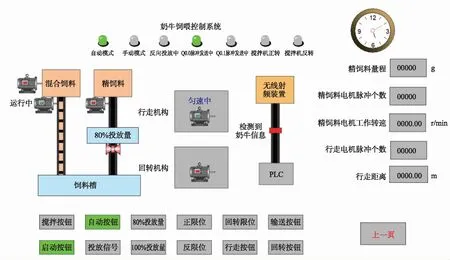
圖10 飼料投放控制系統(tǒng)人機(jī)交互界面圖Fig.10 Human-computer interaction interface of feed delivery control system
3 智慧牧場(chǎng)個(gè)性化自動(dòng)飼喂設(shè)備有限元分析
3.1 精飼料精確定量補(bǔ)飼裝置校核分析
考慮到螺旋輸送器需要處于交變負(fù)荷下工作,故選取45#鋼作為輸送器的材料,飼料支架需要支撐結(jié)構(gòu),故選用Q235作為材料,通過(guò)ANSYS Workbench對(duì)精飼料裝置的螺旋輸送器和支架進(jìn)行校核分析,螺旋輸送器應(yīng)力圖、整體形變圖如圖11和圖12所示。
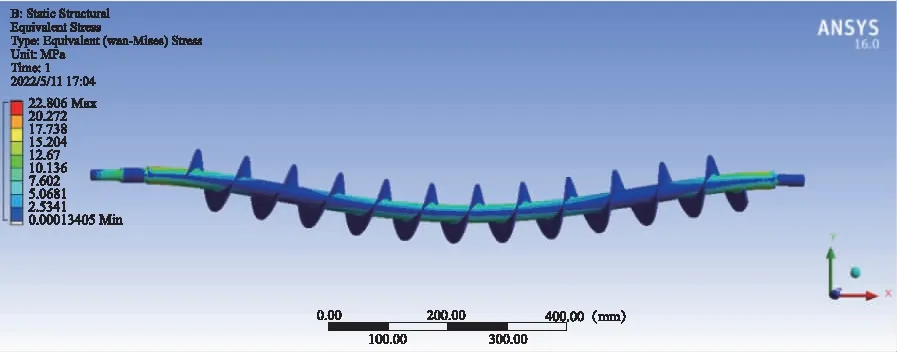
圖11 精飼料螺旋輸送器等效應(yīng)力圖Fig.11 Equivalent stress diagram of concentrate screw conveyor
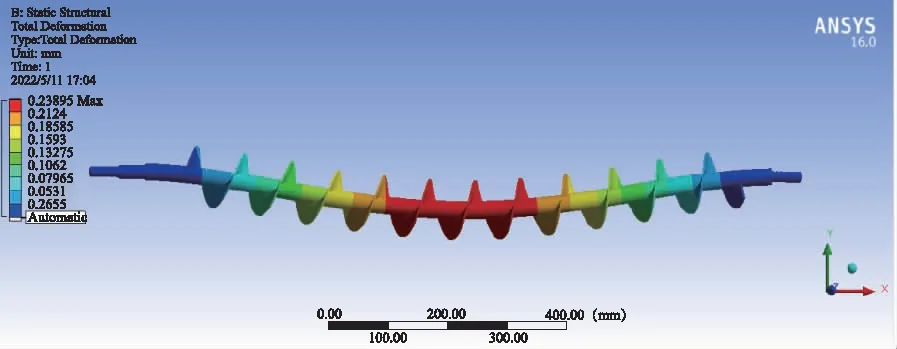
圖12 精飼料螺旋輸送器總體形變圖Fig.12 Overall shape change of concentrate screw conveyor
由圖11可知,精飼料螺旋輸送器最大受力位置重點(diǎn)分布在中間位置,最大的應(yīng)力為22.806 MPa,遠(yuǎn)小于45#鋼的許用應(yīng)力值175 MPa。由圖12可知,螺旋輸送器在中間位置產(chǎn)生最大形變,最大形變值為0.238 95 mm,小于許用形變量2 mm(螺旋輸送葉片與筒壁的間隙),故滿足設(shè)計(jì)要求。精飼料飼喂支架等效應(yīng)力圖、整體形變圖如圖13和圖14所示。
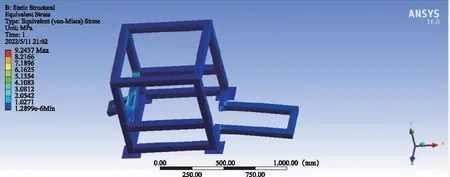
圖13 精飼料飼喂支架等效應(yīng)力圖Fig.13 Equivalent stress diagram of concentrate feed mechanism bracket
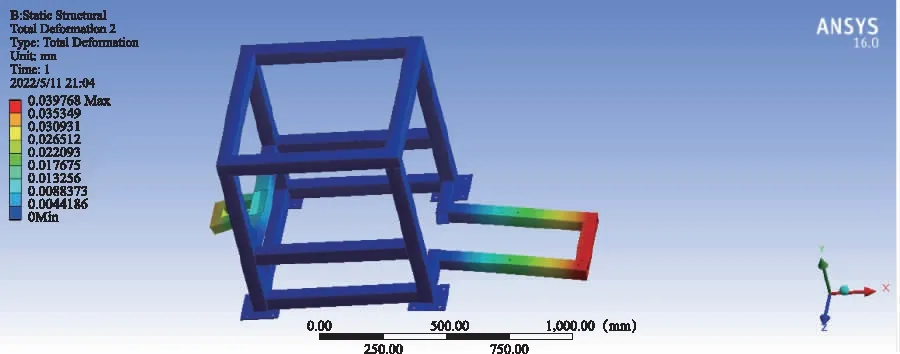
圖14 精飼料飼喂支架總體形變圖Fig.14 Overall shape change of concentrate feed mechanism bracket
由圖13分析得出精飼料飼喂機(jī)構(gòu)支架最大受力發(fā)生在左側(cè)中間位置,其最大值為9.243 7 MPa,而Q235鋼材的許用應(yīng)力值大于其最大值。由圖14分析可知,支架的最右側(cè)位置發(fā)生形變最大,最大的形變值為0.039 768 mm,與支架的尺寸相比可忽略。綜上所述,精飼料飼喂機(jī)構(gòu)支架結(jié)構(gòu)合理,達(dá)到了工作要求。
3.2 精飼料精確定量補(bǔ)飼裝置模態(tài)分析
為了避免電機(jī)和氣缸驅(qū)動(dòng)產(chǎn)生的振動(dòng),以及自動(dòng)飼喂設(shè)備實(shí)際工作中產(chǎn)生的振動(dòng),而導(dǎo)致的設(shè)備共振現(xiàn)象(易造成該設(shè)備的破損),要對(duì)設(shè)備進(jìn)行模態(tài)分析,以保證奶牛個(gè)性化自動(dòng)飼喂設(shè)備實(shí)際使用中的穩(wěn)定性。利用ANSYS Workbench模態(tài)分析計(jì)算出精飼料飼喂支架的前6階固有頻率和振動(dòng)特性,如表3所示。精飼料支架前6階模態(tài)振型圖如圖15所示。
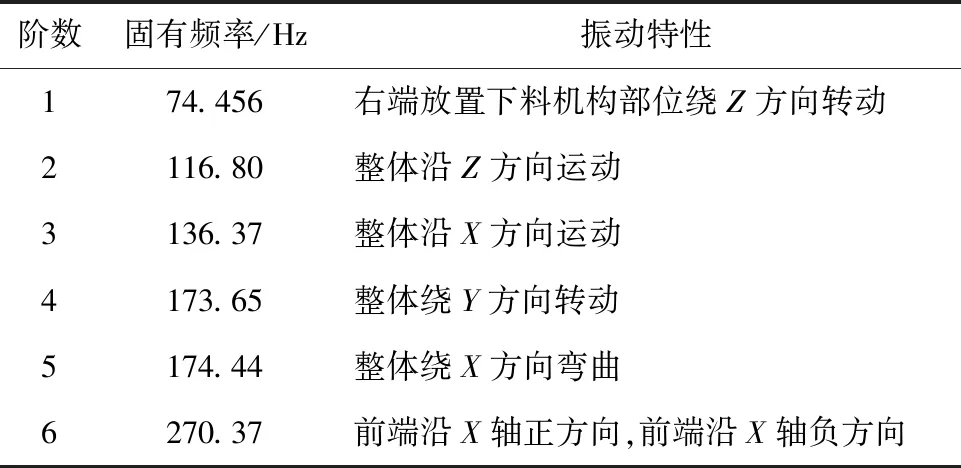
表3 精飼料飼喂支架的固有頻率和振動(dòng)特性
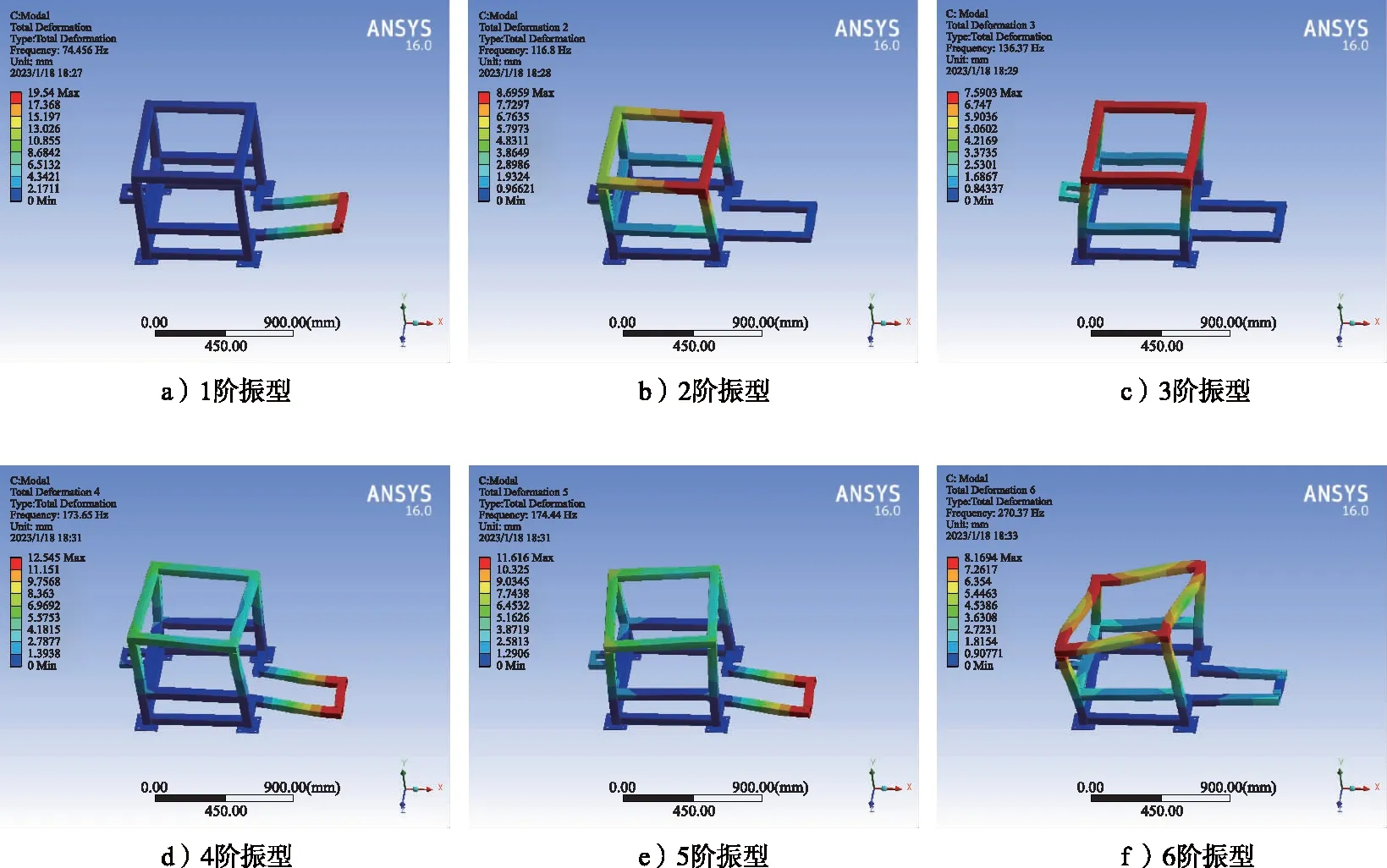
圖15 精飼料飼喂支架前6階模態(tài)振型圖Fig.15 The first six modal shapes of concentrate feed bracket
由圖15可以看到,精飼料飼喂支架的固有頻率范圍是74.456~270.37 Hz。精飼料飼喂支架在工作過(guò)程中所受到的外界激勵(lì)頻率主要來(lái)自螺旋輸送器運(yùn)轉(zhuǎn)引起的振動(dòng),精飼料螺旋輸送器工作轉(zhuǎn)速為105 r/min,故外界激勵(lì)頻率為1.7 Hz,而精飼料飼喂支架1階固有頻率為74.456 Hz,遠(yuǎn)大于外界激勵(lì)頻率,不會(huì)產(chǎn)生共振等現(xiàn)象。
3.3 精飼料精確定量補(bǔ)飼裝置的諧響應(yīng)分析
通過(guò)ANSYS Workbench諧響應(yīng)分析能夠看出,精飼料飼喂支架在固有頻率范圍內(nèi)出現(xiàn)多個(gè)振動(dòng)峰值,精飼料飼喂支架在X,Y,Z方向諧響應(yīng)分析如圖16所示。
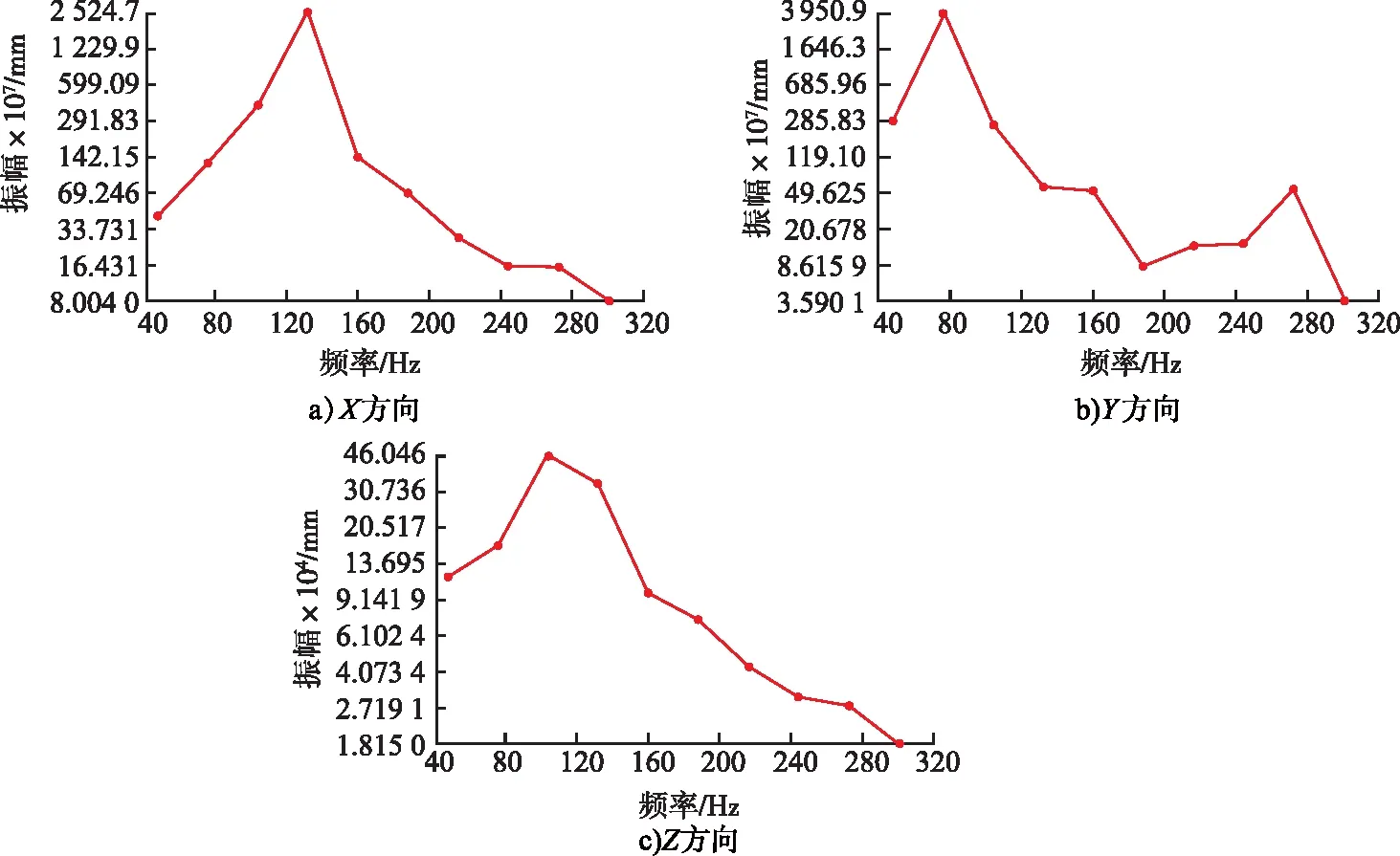
圖16 精飼料飼喂支架XYZ諧響應(yīng)分析Fig.16 XYZ harmonic response analysis of concentrate feed support
由圖16可以看出,精飼料飼喂支架在X,Y,Z方向產(chǎn)生多個(gè)振動(dòng)峰值,其中X方向產(chǎn)生最大峰值對(duì)應(yīng)的頻率為132 Hz,Y方向產(chǎn)生最大峰值對(duì)應(yīng)的頻率為76 Hz,Z方向產(chǎn)生最大峰值對(duì)應(yīng)的頻率為104 Hz。精飼料飼喂支架的前6階固有頻率范圍為74.456 ~ 270.37 Hz,在實(shí)際應(yīng)用中需避免精飼料飼喂支架在此頻率范圍的環(huán)境中工作。由圖15可以看到,精飼料飼喂支架上端和最右側(cè)位置振動(dòng)幅度變化相對(duì)較大,所以需要提高該位置的剛度,同時(shí)也應(yīng)對(duì)精飼料飼喂支架模態(tài)振型圖中產(chǎn)生形變較大的其他位置進(jìn)行剛度的提高,從而保證精飼料飼喂支架的穩(wěn)定性和安全性。
4 實(shí)驗(yàn)數(shù)據(jù)分析
由于本精飼料精確定量補(bǔ)飼裝置是通過(guò)控制螺旋輸送機(jī)的電機(jī)旋轉(zhuǎn)圈數(shù)來(lái)控制下料量,為了驗(yàn)證設(shè)備投料是否準(zhǔn)確,必須對(duì)飼喂裝置的下料精度進(jìn)行檢測(cè)。檢測(cè)依據(jù)如公式(5)所示:
(5)
式中:δ為相對(duì)誤差;M為通過(guò)測(cè)量得到的實(shí)際投料量,kg;M0為理論投料量,kg。
檢測(cè)方法是:通過(guò)選取精飼料輸送機(jī)構(gòu)的有效實(shí)際速度105 r/min為測(cè)試轉(zhuǎn)速,在此飼喂模式下,確定能否夠滿足(測(cè)量范圍)95%的精度要求[15]。由于奶牛的體重、胎次、產(chǎn)奶量、最大產(chǎn)奶量、泌乳期等因素,對(duì)精飼料的需求有很大差別,在實(shí)際生產(chǎn)中,每頭奶牛1天3次投喂,1次所需的精飼料為1~4 kg,因此試驗(yàn)將奶牛的精料量分為以下幾個(gè)量程:1,2,3,4 kg/次。在每個(gè)量程內(nèi),反復(fù)進(jìn)行6次測(cè)試,觀察投料精度是否符合要求。在不同的量程下,按測(cè)試結(jié)果進(jìn)行6次重復(fù)測(cè)量的趨勢(shì)圖如圖17所示。計(jì)算出的不同量程下相對(duì)誤差值如表4所示。

表4 不同量程下的相對(duì)誤差
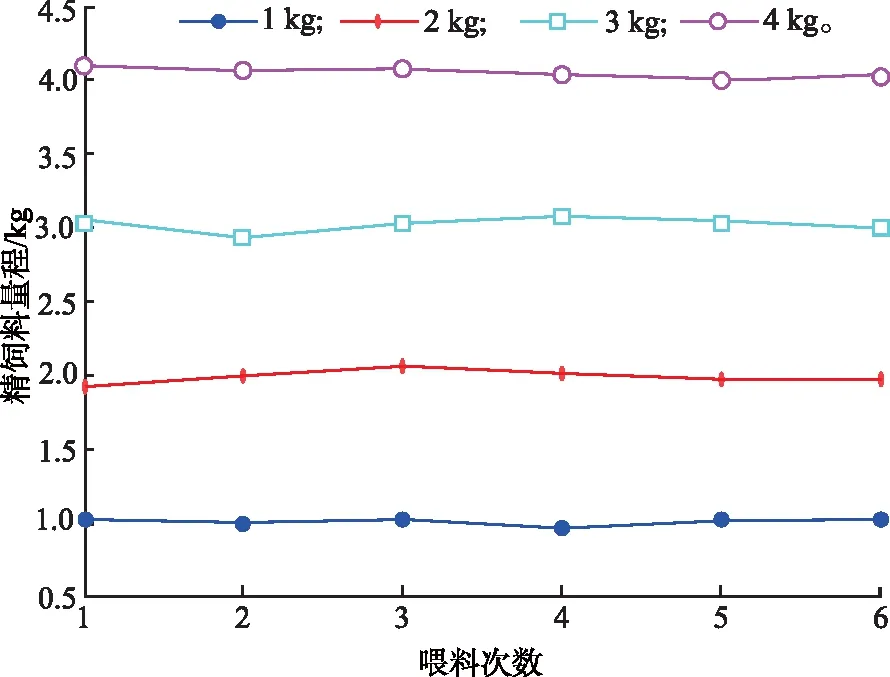
圖17 不同量程下測(cè)量趨勢(shì)圖Fig.17 Measurement trend chart under different ranges
通過(guò)表4結(jié)果顯示,測(cè)試精飼料螺旋輸送機(jī)構(gòu)不同量程下的平均相對(duì)誤差在5%以內(nèi),并且在不同測(cè)試質(zhì)量下的誤差上限和誤差下限也均在要求范圍內(nèi),故滿足設(shè)計(jì)要求。
試驗(yàn)組和對(duì)照組各取6頭奶牛。試驗(yàn)組采用智慧牧場(chǎng)個(gè)性化自動(dòng)飼喂設(shè)備飼喂,其產(chǎn)奶量、產(chǎn)犢日期與對(duì)照組組樣本大致相同,對(duì)照組飼喂采用TMR設(shè)備進(jìn)行,試驗(yàn)組與對(duì)照組飼喂時(shí)間和擠奶時(shí)間相同。試驗(yàn)組奶牛產(chǎn)奶量增值數(shù)據(jù)如表5所示,對(duì)照組奶牛產(chǎn)奶量增值數(shù)據(jù)如表6所示。
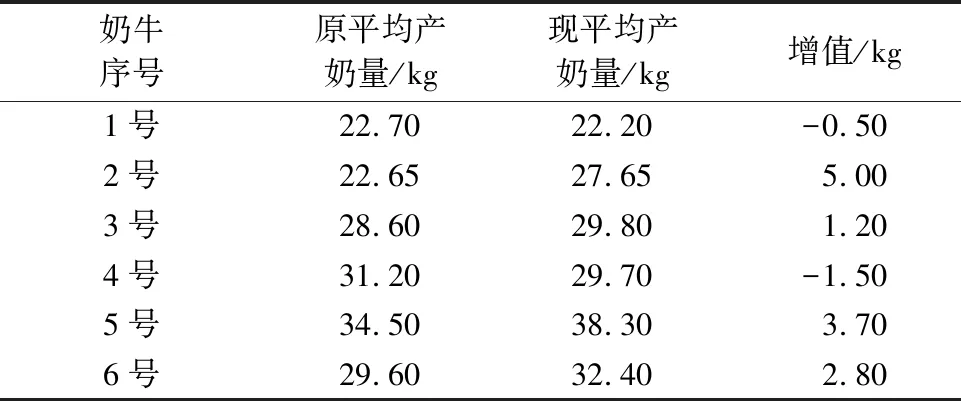
表5 試驗(yàn)組奶牛產(chǎn)奶量增值表
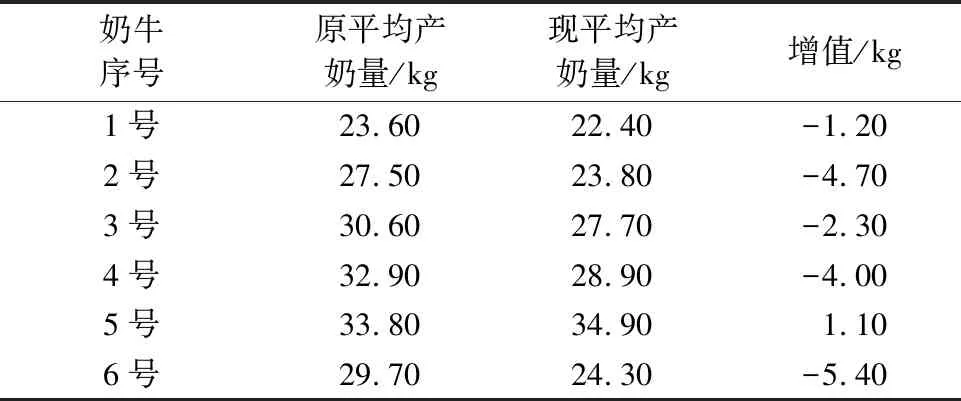
表6 對(duì)照組奶牛產(chǎn)奶量增值表
根據(jù)表5看出,試驗(yàn)組1號(hào)和4號(hào)奶牛的產(chǎn)奶量負(fù)增長(zhǎng),整體的奶牛產(chǎn)奶量成上升趨勢(shì),說(shuō)明個(gè)性化自動(dòng)飼喂設(shè)備可滿足試驗(yàn)組奶牛的生理及產(chǎn)奶對(duì)精飼料的要求。根據(jù)表6看出,對(duì)照組只有5號(hào)奶牛的產(chǎn)奶量略有提高,整體的奶牛產(chǎn)奶量呈下降趨勢(shì),說(shuō)明試驗(yàn)組提供的精飼料無(wú)法達(dá)到奶牛生理及產(chǎn)奶的要求。經(jīng)計(jì)算,試驗(yàn)組的平均產(chǎn)奶量為30 kg,對(duì)照組的平均產(chǎn)奶量為27 kg,故試驗(yàn)組比對(duì)照組平均產(chǎn)奶量提高3 kg。
5 結(jié) 語(yǔ)
根據(jù)智慧牧場(chǎng)個(gè)性化自動(dòng)飼喂設(shè)備的功能特點(diǎn),進(jìn)行了混合飼料和精飼料飼喂的集成一體化設(shè)計(jì),有效解決了無(wú)法按照奶牛個(gè)體差異進(jìn)行精確飼喂的問(wèn)題,保證了奶牛飼喂的準(zhǔn)確性和高效性,提高了奶牛的產(chǎn)奶效率。研究結(jié)論如下。
1)通過(guò)對(duì)精飼料精確定量補(bǔ)飼裝置進(jìn)行有限元靜力學(xué)分析,得到精飼料螺旋輸送器的最大應(yīng)力為22.806 MPa,螺旋輸送器受到的最大變形量為0.238 95 mm,精飼料飼喂支架工作狀態(tài)下的最大應(yīng)力為9.243 7 MPa,精飼料飼喂支架受到的最大變形量為0.039 768 mm,均符合設(shè)計(jì)要求。
2)通過(guò)對(duì)精飼料飼喂支架進(jìn)行模態(tài)分析和諧響應(yīng)分析,得到前6階頻率為74.456 ~ 270.37 Hz,精飼料飼喂支架在工作過(guò)程所受到的外界激勵(lì)頻率主要來(lái)自螺旋輸送器運(yùn)轉(zhuǎn)引起的振動(dòng),精飼料飼喂支架1階固有頻率為74.456 Hz,遠(yuǎn)大于外界激勵(lì)頻率,不會(huì)產(chǎn)生共振等現(xiàn)象。
3)相關(guān)試驗(yàn)表明,檢測(cè)值與目標(biāo)投放誤差小于5%,符合誤差范圍標(biāo)準(zhǔn),試驗(yàn)組的奶牛產(chǎn)奶量比對(duì)照組提高了3 kg,證明該飼喂設(shè)備運(yùn)行平穩(wěn)、安全可靠。
本研究實(shí)現(xiàn)了精飼料的精確飼喂,但未能實(shí)現(xiàn)混合飼料的差異化喂養(yǎng),之后將對(duì)此開(kāi)展深入研究。
猜你喜歡
中國(guó)特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
保健醫(yī)苑(2022年5期)2022-06-10 07:46:12
小哥白尼(趣味科學(xué))(2021年8期)2021-11-20 06:08:04
中國(guó)生物醫(yī)學(xué)工程學(xué)報(bào)(2019年4期)2019-07-16 08:04:16
模具制造(2019年3期)2019-06-06 02:10:54
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
工業(yè)設(shè)計(jì)(2016年12期)2016-04-16 02:52:00
設(shè)備管理與維修(2015年12期)2015-04-09 06:57:00
沈陽(yáng)醫(yī)學(xué)院學(xué)報(bào)(2014年4期)2014-12-27 13:44:20
- 河北工業(yè)科技的其它文章
- 時(shí)空環(huán)境因素對(duì)無(wú)信號(hào)交叉口事故嚴(yán)重程度的異質(zhì)性影響
- 油庫(kù)區(qū)火災(zāi)應(yīng)急過(guò)程風(fēng)險(xiǎn)因素-事故情景結(jié)構(gòu)方程模型研究
- 特殊工況下盾構(gòu)機(jī)出井吊裝施工技術(shù)研究
- 風(fēng)機(jī)錨桿松弛對(duì)基礎(chǔ)局壓混凝土疲勞損傷的影響分析
- 全風(fēng)化混合花崗巖邊坡降雨沖刷試驗(yàn)研究
- 敞開(kāi)式高壓隔離開(kāi)關(guān)接線端子過(guò)熱分析及現(xiàn)場(chǎng)處理方案