雙邊永磁同步直線電機隨機模型系統辨識
2023-07-31 05:04:56俞建榮曹旺輝盛沙劉強劉學城
科學技術與工程 2023年20期
俞建榮,曹旺輝,盛沙,劉強,劉學城
(北京石油化工學院,精密電磁裝備與先進測量技術研究所,北京 102617)
微發光二極管顯示器(mini/micro light emitting diode display,Mini/Micro LED)作為新一代顯示技術,具有超高解析度、無拼接縫隙、高發光密集度及快響應等優點,是繼液晶顯示屏(liquid crystal display,LCD)和有機發光顯示器(organic light-emitting diode display,OLED)之后頗具活力的顯示技術[1-2]。Mini/Micro LED顯示屏量產化生產有許多制作環節,包括芯片制備、巨量轉移、檢測與修復等,其中芯片巨量轉移是制約顯示屏量產的技術瓶頸[3]。運動定位平臺、視覺定位系統和芯片剝離系統是構成巨量轉移工作臺的三大部件,其中運動定位平臺作為實現芯片從源基板到目標基板轉移的重要部分,其運動執行機構分為“旋轉電機+絲杠”和“直線電機+機械導軌”兩類[4]。前者由旋轉電機產生電磁轉矩,經過傳動機構轉換成直線運動,但傳動機構存在彈性變形、間隙和摩擦等不利因素,會引起高頻重復定位精度差和動態響應慢等問題。后者由直線電機直接驅動,無需傳動結構,具有高剛度、高加減速度、快響應、高定位精度等優點[5],能夠滿足芯片巨量轉移中微米級點對點高頻重復定位需求。
直線電機按照結構差異有扁平型(單邊型和雙邊型)、圓筒型和圓盤型,根據工作原理又可分為交流感應直線電機、交流同步直線電機、直流直線電機和步進直線電機等[6]。其中交流同步直線電機中的雙邊型永磁同步直線電機(permanent magnet synchronous linear motor,PMSLM)具有高加速度、快動態響應、小推力波動等優勢,能實現高帶寬運動控制。但其易受溫度、摩擦等因素的影響,運動中參數易發生變化,影響系統建模精度,不利于運動控制。因此如何精準建立PMSLM動態系統模型是保證PMSLM高性能運動控制的關鍵。
目前的動態系統建模可分為機理建模和實驗建模兩類,前者通過已知物理規律和參數推導得出系統模型(白箱模型),后者基于輸入輸出數據和相應的辨識方法獲得模型參數(黑箱模型)[7]。PMSLM的系統辨識研究按照辨識參數可分為物理參數辨識和傳遞函數模型參數辨識。文獻[8]采用改進粒子群算法對永磁同步電機的電阻、交直軸電感和永磁磁鏈的物理參數進行辨識研究,通過混沌變異小生境粒子群算法實現物理參數的精確辨識。文獻[9]研究了一種新型自適應互聯擴展卡爾曼觀測器,建立了復雜的多參數互聯耦合補償辨識模型,實現了PMSLM高精度抗干擾在線多物理參數辨識。文獻[10]針對噪聲環境下分數階系統建模問題,結合粒子群算法和遞推輔助變量法完成整體辨識,并在電網絡系統實例中得到驗證。但受限于新輔助變量的構造,造成模型參數辨識精度低。文獻[11]針對含有飽和特性的Hammerstein系統,將靜態非線性環節和動態線性環節分開串聯,通過遞推算法利用雙率采樣數據辨識模型參數。文獻[12]對于切換非線性系統,提出了基于神經網絡的Hammerstein-Wiener模型,采用折息遞推辨識算法辨識非線性子系統參數。然而對于切換規律難以確定的非線性系統,則存在系統參數辨識困難問題。文獻[13]使用可分離最小二乘法結合帶有非線性特性和隨機擾動的Wiener Box-Jenkins模型,辨識出系統傳遞函數模型參數,并采用蒙特卡羅模擬驗證了辨識算法的有效性。文獻[14]針對PMSLM系統傳遞函數模型參數辨識問題,提出了辨識精度高于標準遞推最小二乘法的輔助變量遞推最小二乘法。但其對激勵信號源、采樣周期等試驗條件要求苛刻,致使此類辨識算法沒有在工程上得到應用。
為解決雙邊PMSLM傳遞函數模型參數動態變化、傳統方法辨識精度低的問題,提出一種基于隨機模型的系統辨識方法,分析運動過程中系統特性,確定傳遞函數模型的結構和階次。針對系統可能存在的系統擾動,選擇帶有隨機擾動項的Box-Jenkins模型,采用Levenberg Marquardt算法進行迭代優化,尋找最優模型參數。通過設計不同采樣頻率、不同注入電流幅值和不同電機運動速度條件下的系統辨識實驗,分析參數辨識結果。最后對實驗平臺和輸入信號的設計進行介紹和說明。
1 運動定位平臺
1.1 運動定位平臺結構及工作原理
運動定位平臺玻璃板載晶平臺結構示意圖如圖1所示,主要包括雙邊PMSLM(提供電磁推力)、兩條機械導軌(作為支撐單元)、載晶平臺(通過真空吸盤吸放LED芯片載晶玻璃板)以及氣缸等氣路元件,其中載晶平臺和氣路元件部分與無鐵芯的直線電機動子相連接。當PMSLM通入控制電流時,與電機動子相連接的載晶平臺按照控制指令做高頻率兩點之間的往復運動,實現LED芯片巨量轉移過程中的重復定位功能。

圖1 玻璃板載晶平臺示意圖Fig.1 Schematic diagram of glass plate loaded crystal platform
1.2 PMSLM數學模型
在推導PMSLM數學模型時,做如下假設:忽略磁飽和;不考慮初級鐵芯渦流及磁滯損耗;初級與次級之間的氣隙均勻;次級永磁磁場在氣隙空間正弦分布;初級電樞繞組中的感應電動勢為正弦波;初級繞組線圈均勻分布。運用磁場定向控制策略,建立dq軸坐標系,對電機的電流、電壓作park變換,可得到電機dq軸電壓方程和電磁推力方程為
(1)
式(1)中:id、iq和ud、uq分別為PMSLMdq軸電流和電壓;R為電阻;Ld、Lq分別為dq軸的電感;ψPM為永磁磁鏈;pn為極對數;Fe為電磁推力;τ為磁極中心距;v為直線電機運動速度。
由于假設研究的永磁同步直線電機氣隙均勻,則Lq=Ld,采用id=0的控制策略可得
(2)
式(2)中:Ke為反電勢系數;Kf為電磁推力系數。
PMSLM運動方程為
(3)
式(3)中:m為PMSLM動子質量;Bv為摩擦系數;Fn為外部干擾力;FL為負載阻力。
1.3 系統傳遞函數模型
PMSLM通過控制器輸出電流控制指令,作用于電機伺服驅動器,經濾波放大作用后,驅動載晶平臺運動,并用光柵尺測量反饋電機的輸出位移信號。將系統的外部擾動項視為擾動輸入下的系統輸出,則電流-位移為輸入輸出關系的系統傳遞函數框圖如圖2所示。

Ts為采樣周期;K為電流增益系數;Ka為驅動放大系數;Kf為電磁推力系數;Ke為反電勢系數;m為PMSLM動子質量;Bv為摩擦系數;R為電阻;iqc為PMSLM伺服驅動器電流輸入;s為拉普拉斯算子;Ka為PMSLM驅動器放大系數;V為PMLSM的速度環速度輸出;D為PMLSM的位置環位移輸出圖2 PMSLM系統傳遞函數框圖Fig.2 Block diagram of PMSLM system transfer function
經過推導化簡,電流-位移關系的輸入輸出系統傳遞函數表達式為

=KKaKf{s(Ts+1)[Lqms2+(Rm+
Kam+BvLq)s+(BvR+BvKa+
KfKe)]}-1+FΣ(s)
(4)
式(4)中:Ts為采樣周期;K為電流增益系數;Ka為驅動放大系數;Kf為電磁推力系數;Ke為反電勢系數;F∑(s)為系統擾動輸入時的傳遞函數項。
采用離散系統模型參數辨識,需經雙線性變換對傳遞函數進行離散化處理,如式(5)所示。
(5)
式(5)中:α1、α2、α3、α4、β0、β1、β2、β3、β4、σ(延遲因子)為所要辨識的離散系統模型參數。
2 系統辨識
2.1 Box-Jenkins模型
Box-Jenkins模型是帶有隨機擾動的確定性模型,將系統輸入分為正常輸入和擾動輸入,即由系統輸入輸出確定性部分和隨機擾動信號造成的不確定性部分組成。相比于應用廣泛的ARX模型,其擾動輸入傳遞函數更具有獨立性,不依賴于系統的確定性階次,通過將確定性模型和隨機擾動相結合可得到模型結構示意圖如圖3所示。

v(t)為隨機擾動輸入;u(t)為正常輸入;y(t)為含有噪聲的輸出圖3 Box-Jenkins模型示意圖Fig.3 Schematic diagram of the Box-Jenkins model
y(t)可表示為
(6)
式(6)中:B(z-1)、F(z-1)、C(z-1)和D(z-1)為基于離散移位算子z-1的多項式,其表達式為
(7)
式(7)中:nb、nf、nc、nd為根據先驗知識選取的參數最大階次,bnb、fnf、cnc和dnd為相應的B(z-1)、F(z-1)、C(z-1)和D(z-1)最大階次的系數。
對于具有l個周期時滯系統,模型中分子項參數b0,b1,…,bl-1為零。
2.2 預報誤差方法
Box-Jenkins模型的參數可用向量θ表示。
θ=[b0,b1,b2,…,bnb,f1,f2,…,fnf,
c1,c2,…,cnc,d1,d2,…,dnd]T
(8)

(9)

={1-[C(z-1)/D(z-1)]-1}v(t,θ)
(10)
將式(10)代入式(9)可得

(11)
模型預測誤差e(t)可表示為

(12)
為量化每次迭代優化結果,定義平方差(mean square error,MSE)代價函數為
(13)

(14)
為確定系統的延遲因子σ,通過系統脈沖響應,測量輸入電流的延遲時間(時滯周期),進而在離散系統辨識過程中直接輸入系統的時滯周期nk。
2.3 Levenberg Marquardt迭代優化算法
由于系統中含有可能的延遲非線性特性,Levenberg Marquardt迭代優化算法通過每次迭代更新預測輸出值的參數向量,解決非線性環節的影響。令θi表示為第i次迭代的參數向量估計值,其可以用式(15)進行迭代更新。
θi+1=θi+δi
(15)
式(15)中:δi是為保證VN(θi+1)≤VN(θi)而選擇合適的方向和步長。
δi方向的獲取基于對當前參數估計值θi的二階泰勒展開,可表示為
(16)
式(16)中:雅可比矩陣J用來表示預測輸出關于θ的一階偏導數項;海森矩陣H為評價函數VN關于θ的二階偏導數項。
對式(16)求關于δi的導數,并將其等于零,可得到使VN(θ)最小的δi值,其可表示為
δi=H-1JTe
(17)
使用Levenberg-Marquardt方法時,需保證得到可逆的近似海森矩陣H,可表示為
H=JTJ+ξjI
(18)
式(18)中:ξj用來控制步長和調節收斂;I為n×n的單位矩陣。
搜索方向給出為
δi=(JTJ+ξj)-1JTe
(19)
3 實驗設計
3.1 實驗平臺介紹
采用的實驗平臺如圖4所示,芯片巨量轉移工作臺的載晶平臺采用LI4-S4型雙邊PMSLM驅動,其PMSLM電氣及機械參數如表1所示。實驗平臺采用以色列高創公司的CDHD伺服驅動器輸出電流控制信號驅動電機運動,運用德國RSF Elektronik公司的敞開式直線光柵尺(分辨率0.5 μm)測量反饋位置信號,使用Servo Studio軟件編寫辨識實驗控制參數和辨識數據記錄腳本。

表1 PMSLM電氣及機械參數Table 1 PMSLM electrical and mechanical parameters
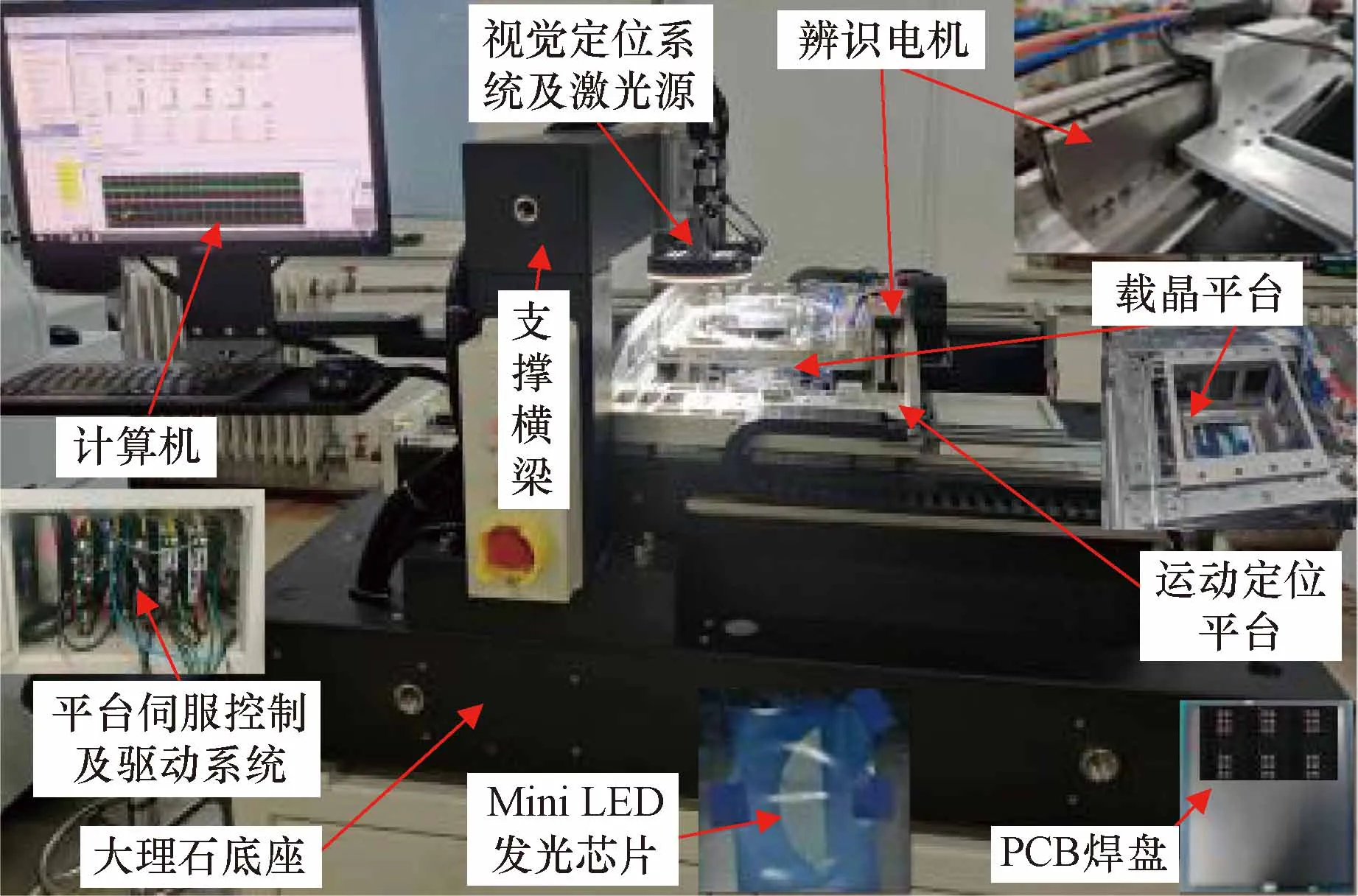
圖4 電機辨識實驗平臺Fig.4 Motor identification experiment platform
3.2 輸入輸出數據采集與分析
通過機理分析選擇模型結構和階次后,發現輸入信號是影響模型參數辨識精度的主要因素。由于逆M序列能夠克服M序列中的直流成分,避免了對辨識對象的靜擾動,且易于工程實現,因此選擇逆M序列作為系統辨識實驗電流輸入類型,如圖5所示。

圖5 實驗測試信號設計Fig.5 Design of experimental test signal
4 實驗辨識結果與分析
采用迭代優化算法系統辨識時,輸入輸出數據較為敏感。通過設計多組不同采樣頻率、注入電流幅值和電機運動速度條件下的辨識實驗,分析研究影響參數辨識的因素和規律,驗證參數辨識方案的有效性。實驗中采集雙邊PMSLM運動中的2 000組輸入輸出數據,前1 500組數據作為辨識訓練數據,后500組數據作為驗證數據。接著通過分析模型仿真輸出、辨識誤差、代價函數,達到優化辨識模型參數目的。
4.1 采樣頻率對辨識結果的影響
采樣頻率對辨識的影響主要在于對數據的采集和處理上,頻率過低會丟失系統部分中高頻率信息,而且頻率過高又會采集到高頻擾動噪聲,不利于精確辨識模型參數。因此,設計多組不同采樣頻率條件下的辨識實驗,分析其對辨識結果的影響。為了激發雙邊PMSLM系統響應,初步選擇注入電流幅值為2.4 A,電機運動速度設為20 mm/s,輸入輸出數據采樣頻率為500 Hz、1 kHz、2 kHz、4 kHz。系統模型參數辨識結果如表2所示,表2中第一列為系統模型傳遞函數參數、模型匹配度和平方差。

表2 不同采樣頻率條件下的模型參數辨識結果Table 2 Model parameters identification results under different sampling frequency
通過表2和圖6可以得出,當采樣頻率越來越大時,模型參數辨識的匹配度會有所不同。當采樣頻率為2 kHz時,采集的數據集中于相似的一段小運動行程中,會造成94.87%的高匹配度,但對于整個系統模型參數辨識而言不具有代表性。采樣頻率為1 000 Hz時,系統辨識匹配度為90.69%,相比4 kHz的81.04%相應提高了10.6%;當采樣頻率為500 Hz時,數據采集過程中會丟失500 Hz以上的有用信息,此時辨識不能還原真實系統特征。因此,為獲得系統不同頻率時的系統特性以提高辨識精度,選擇1 000 Hz作為數據采集頻率。

圖6 不同采樣頻率條件下辨識結果Fig.6 Identification results under different sampling frequencies
4.2 注入電流幅值對辨識結果的影響
注入電流的大小影響著系統是否充分被激發,電流過低時,PMSLM驅動器能力弱;電流過高則存在過飽和現象。因此,已知PMSLM的持續電流Icon=3.536 A,選擇0.5~0.75倍的Icon,對應應取1.7、1.9、2.0、2.1、2.3、2.5、2.7 A的注入電流進行分析,模型參數辨識結果如表3所示。

表3 不同注入電流幅值條件下的模型參數辨識結果Table 3 Model parameters identification results under different injection current amplitudes
不同注入電流幅值條件下的參數辨識值變化曲線如圖7所示,通過分析發現,隨著注入電流幅值的增加,模型參數辨識精度先增加再減小。在表3中當電流幅值為2.0 A時,模型的匹配度達到92.01%;MSE值隨著電流幅值的增大也是先增大后減小,當電流幅值為1.7 A時,MSE為2.435×10-4,當電流幅值為2.0 A時,MSE為2.962×10-4。注入電流幅值太大時,會有額外損耗且會造成辨識過程高頻振動,影響參數辨識精度;電流過低時,使得PMSLM驅動能力受限,無法完全激勵系統特性。綜合考慮,采用注入電流幅值為2.0 A時,適合作為辨識實驗條件。

圖7 不同注入電流幅值條件下的參數辨識值Fig.7 Parameters identification values under different injection current amplitudes
4.3 電機運動速度對辨識結果的影響
分析采樣頻率和注入電流幅值對辨識結果的影響之后,確定了采樣頻率為1 000 Hz,注入電流幅值為2.0 A。因此,為研究電機運動速度對模型參數辨識的影響,基于電機有效運動行程為200 mm,設定實驗速度條件為20~50 mm/s,間隔為5 mm/s。對不同速度條件下的數據進行辨識,系統模型參數辨識結果如表4所示。

表4 不同運動速度條件下的模型參數辨識結果Table 4 Model parameters identification results under different motion speed conditions
表4中,隨著PMSLM運動速度增加,在有效運動行程中,運動位移距離越大,采集的位移信息更豐富。但受限于實驗平臺行程,速度在20~50 mm/s的范圍變化時,模型參數辨識精度先減小再增大,當運動速度為50 mm/s時,模型的匹配度達到為94.81%;MSE值隨著運動速度增大而有增有減,速度為25 mm/s時,MSE為4.801×10-4,速度為50 mm/s時,MSE為7.84×10-4。考慮到模型匹配度作為衡量系統辨識的重要指標之一,在MSE值相差不大的情況下,選擇50 mm/s作為辨識時PMSLM運動速度條件。
采樣頻率為1 000 Hz,注入電流幅值為2.0 A和電機運動速度為50 mm/s時,辨識仿真輸出如圖8(a)所示,辨識位移輸出曲線與實驗采集位移曲線擬合效果良好,模型匹配度為94.81%。辨識誤差曲線(辨識位移值-實際輸出位移值)如圖8(b)所示,誤差隨時間的增加而存在波動,但誤差值在-0.922~0.607 mm區間。辨識參數值與代價函數值隨著迭代次數的變化曲線如圖9、圖10所示,經過20次Levenberg Marquardt算法計算之后,得到最優參數辨識結果如表5所示。

表5 最優參數辨識結果Table 5 Optimal parameter identification results

圖8 最優辨識結果及誤差曲線Fig.8 Optimal identification result and error curve

圖9 參數迭代優化曲線Fig.9 Parameter iterative optimization curve

圖10 代價函數迭代優化曲線Fig.10 Cost function iterative optimization curve
按照表5的辨識參數值,并結合式(7)可以將B(z-1)、F(z-1)、C(z-1)和D(z-1)分別寫為
B(z)=0.020 3z-2+0.004 3z-3-0.001 7z-4
(20)
C(z)=1+0.227 7z-1
(21)
D(z)=1-1.000 2z-1
(22)
F(z)=1-1.452z-1+0.553 4z-2-
0.737 3z-3+0.636 3z-4
(23)
結合式(5)和式(6),帶有隨機模型的的雙邊PMSLM離散傳遞函數表達式為

(24)
5 結論
針對雙邊PMSLM傳遞函數模型參數辨識問題,提出了基于Box-Jenkins模型的系統模型參數辨識方法,采用Levenberg Marquardt算法進行迭代優化,尋找最優模型參數。按照最優輸入信號設計選擇合適的頻率和幅值以充分激勵系統。通過對比多組辨識實驗得出:當采樣頻率為1 000 Hz,注入電流幅值為2.0 A和電機運動速度為50 mm/s時,辨識仿真輸出匹配度為94.81%,MSE為7.84×10-4。最后介紹了實驗平臺和設計了電流輸入信號,為工程實際應用提供指導借鑒。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
