船舶電力推進系統(tǒng)無刷直流電機控制技術(shù)
2023-07-22 08:24:12王紅林
艦船科學(xué)技術(shù) 2023年12期
關(guān)鍵詞:信號
王紅林
(1. 江蘇科技大學(xué) 自動化學(xué)院, 江蘇 鎮(zhèn)江 212028;2. 鎮(zhèn)江市高等專科學(xué)校 電氣與信息學(xué)院, 江蘇 鎮(zhèn)江 212028)
0 引 言
電力推進系統(tǒng)具有良好的經(jīng)濟性、安全性以及優(yōu)越的操作性能。同時,電力推進系統(tǒng)所需空間較小,工作噪聲和污染相較于傳統(tǒng)的推進系統(tǒng)均有很大的改善,是目前研究和關(guān)注的重點。而無刷直流電機(brushless direct current motor)作為一種高效率、高可靠性、低噪聲的電機類型,被廣泛應(yīng)用于船舶電力推進系統(tǒng)中[1],如何實現(xiàn)對無刷直流電機的精確控制一直是研究的熱點和難點。
本文從無刷直流電機的結(jié)構(gòu)原理入手,分析其控制策略及其優(yōu)缺點,通過理論分析和實驗驗證,提出一種新的無刷直流電機控制技術(shù),以此為基礎(chǔ),實現(xiàn)對船舶電力推進系統(tǒng)的優(yōu)化控制。該研究對于提升船舶的運行效率、減少污染排放、提高航行安全性具有重要的理論意義和實際應(yīng)用價值。
1 工作原理分析
船的電力系統(tǒng)中無刷直流電機使用的非常普遍,這是由于無刷直流電機具有結(jié)構(gòu)簡單、使用穩(wěn)定等優(yōu)點。磁場是由定子產(chǎn)生而且這個磁場是不會變化的,為了能夠驅(qū)動直流電機轉(zhuǎn)動,在無刷直流電機的控制方式上需要不斷改變繞組的電流方向,這樣產(chǎn)生了2 個完全垂直的磁場,這2 個磁場能夠不斷地驅(qū)動電機旋轉(zhuǎn)[2],如圖1 所示。
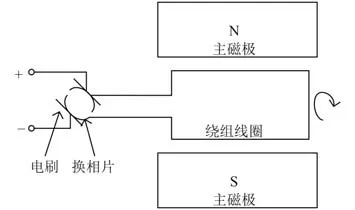
圖1 普通直流電動機結(jié)構(gòu)示意圖Fig. 1 General DC motor schematic
無刷直流電機則是去掉了圖1 中的電刷,其原理如圖2 所示,電子開關(guān)線路、位置傳感器以及電機本體就構(gòu)成了一個最簡單的無刷直流電機[3]。
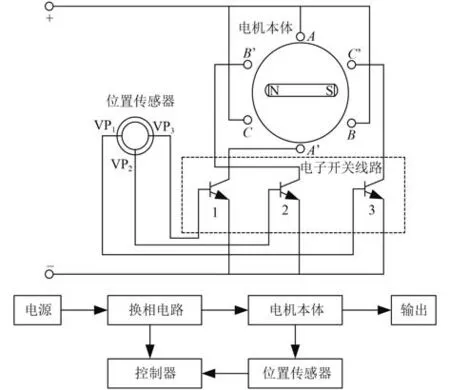
圖2 無刷直流電機結(jié)構(gòu)原理圖Fig. 2 Brushless DC motor structure schematic diagram
電機本體包括定子和轉(zhuǎn)子,定子又由定子繞組和定子芯組成,在工作過程中,定子固定不動。而轉(zhuǎn)子在工作過程中是旋轉(zhuǎn)的,轉(zhuǎn)子通常由永磁體制成。電機能夠轉(zhuǎn)動的關(guān)鍵是電流產(chǎn)生的磁電動勢和轉(zhuǎn)子之間會產(chǎn)生互相作用力,轉(zhuǎn)子最終會在這種作用力下不斷轉(zhuǎn)動。電機的結(jié)構(gòu)非常簡單,因而在出現(xiàn)故障時也非常容易維修。
位置傳感器在無刷直流電機中較為常見,位置傳感器能夠獲得定子和轉(zhuǎn)子的相對位置,位置傳感器也有多種類型,如電磁式和光電式等,當(dāng)轉(zhuǎn)子轉(zhuǎn)過位置傳感器時,位置傳感器就可以獲得當(dāng)前電機的轉(zhuǎn)動方向以及速度等信息,從而方便控制電路對電機進行控制[4]。
功率管、轉(zhuǎn)子位置信息處理器構(gòu)成了電子開關(guān)電路,電子開關(guān)電路控制了各相繞組的通電順序和時間,位置傳感器的輸出信號經(jīng)過電子開關(guān)電路放大后,作為觸發(fā)信號來控制繞組,是無刷直流電機實現(xiàn)無接觸換向功能的關(guān)鍵部分。
對無刷直流電機的電壓進行計算時需要假設(shè)無刷直流電機三相繞組的基本參數(shù)完全相同,這些基本參數(shù)包括了電阻和電感,同時由于在電機中產(chǎn)生的磁場是方波,因而可以對無刷直流電機的三相電壓進行計算,如下式:
其中:p為微分算子;ua,ub,uc為三相定子相電壓;Ra,Rb,Rc為三相定子相電阻;ia,ib,ic為三相定子相電流;ea,eb,ec為三相定子反電動勢;La,Lb,Lc為三相定子繞組自感;Lab,Lac,Lba,Lbc、Lca,Lcb為三相定子繞組間互感, 同時,Lab=Lba,Lac=Lca,Lbc=Lcb。
在同樣的前提條件下,無刷直流電動機的轉(zhuǎn)矩表達式如下:
其中:Pn為電機的極對數(shù);?為電機的角速度。如果忽略轉(zhuǎn)動時的粘滯系數(shù),可以得到無刷直流電機的運動方程(TL為電機的負(fù)載轉(zhuǎn)矩,J為電機的轉(zhuǎn)動慣量)。由此可以看出,電磁轉(zhuǎn)矩大小與磁通和電流幅值成正比。
工作過程中,控制無刷直流電機的速度以及轉(zhuǎn)矩對功能的實現(xiàn)非常重要,主要利用反電動勢的計算方程實現(xiàn)上述控制功能:
其中:N為定子各相的線圈數(shù);l為轉(zhuǎn)子的長度;r為轉(zhuǎn)子的內(nèi)徑;B為轉(zhuǎn)子的磁通密度;ω為電機的角速度;i為相電流;θ為轉(zhuǎn)子位置。
2 基于DSP 的無刷直流電機控制系統(tǒng)
DSP 是數(shù)字信號處理(digital signal processing)的簡稱,考慮到船舶在航行中的復(fù)雜情況,需要快速處理大量的數(shù)據(jù),因此,本文基于DSP 構(gòu)建船舶推進系統(tǒng)中的電機控制系統(tǒng),系統(tǒng)使用無刷直流電機,如圖3所示。
位置傳感器則實時采樣轉(zhuǎn)子位置,將位置信息反饋回控制器,生成PWM 信號,驅(qū)動功率開關(guān)器件并提供換相信號。逆變器則將反饋的轉(zhuǎn)子位置信號處理后,通過三相逆變器將直流電能逆變成交流電能,使電機能夠持續(xù)運轉(zhuǎn)。整個控制系統(tǒng)采用了電流、轉(zhuǎn)速雙閉環(huán)的控制策略,電流環(huán)和速度環(huán)都采用模糊PID 算法進行調(diào)節(jié),該算法相對于PID 算法需要進行嚴(yán)格的比例、積分和微分系數(shù)的選取,而模糊算法則可以在線對這3 個系數(shù)進行自動調(diào)節(jié),大大減少實驗的時間和工作量。
2.1 核心本體模塊
整個控制系統(tǒng)中,BLDCM 本體模塊是設(shè)計的關(guān)鍵部分,同時在設(shè)計前需要對其進行仿真,以避免在最后的設(shè)計和制造過程中出現(xiàn)問題。仿真一般使用Matlab 中的Simulink 來實現(xiàn)。在使用Simulink 構(gòu)建出仿真模型后,可以對仿真模型中的轉(zhuǎn)速、電壓、電流等進行計算。
本文選擇分段線性法獲取反電動勢波形,這一環(huán)節(jié)對電機本體仿真模塊的性能具有直接影響和決定作用。使用分段線性法的優(yōu)點在于其達到的精度非常高,并且在實現(xiàn)方式上和其他方法相比更加簡單。在對電機控制系統(tǒng)進行仿真時實現(xiàn)的難易程度和實現(xiàn)的精度對于仿真結(jié)果具有非常重要的影響。傅里葉變換方法應(yīng)用也比較多,但是在實現(xiàn)方式上較為復(fù)雜,因而本文對二相導(dǎo)通星型的核心本體模塊進行仿真使用分段線性法,最終得到了反電動勢波形,如圖4 所示。
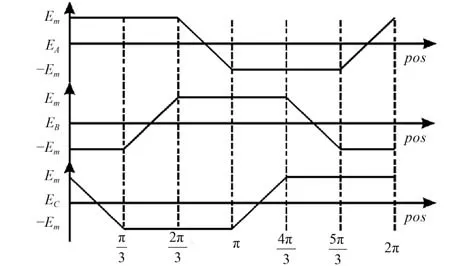
圖4 反電動勢波形Fig. 4 Back EMF waveform
2.2 DSP 和IPM 模塊
DSP 的脈沖寬度調(diào)制電路由6 個子模塊組成,每個通道均可以輸出兩路PWM 調(diào)制信號。在驅(qū)動器中,逆變?nèi)珮蛴? 個功率管組成,每個橋臂上的上橋臂和下橋臂的功率管驅(qū)動信號互補。因此,在輸出脈沖信號之前,需要使用驅(qū)動電路將其放大以驅(qū)動負(fù)載。
IPM 是一種集成功率模塊,可將電機驅(qū)動和主控系統(tǒng)集成在一起,使電機智能供電,縮短電機控制器研發(fā)周期,同時具有使用方便、成本低廉等優(yōu)點。該模塊將電機功率、控制和保護模塊集成在一起,不僅結(jié)構(gòu)簡單,而且整體性能也得到了提升。
為了提升輸入電壓,采用三路斬波電路,其中每一路的電路均由二極管與電容組成。由于電機既是電動機又是發(fā)電機,二極管起到了防止電流反向流動的作用,而電容則用于儲存電能。在PWM 信號的高頻工作條件下,升壓電路的目的是將放大后的輸入電壓傳輸至驅(qū)動芯片,從而使得電子開關(guān)電路在其控制下能夠穩(wěn)定工作。六路PWM 信號輸出至功率管柵極兩端,其中每相由2 個功率管控制,功率管輸出信號與輸入信號相反。因此,驅(qū)動功率管需要進行多級電路分析和處理,才能最終驅(qū)動這六路PWM 信號[6]。
2.3 軟件控制模塊
軟件控制模塊主要實現(xiàn)模糊PID 算法、PWM 控制信號輸出、電流信號和反電動勢信號的采樣以及使用MOS 管或者IGBT 實現(xiàn)開關(guān)的控制。
為了滿足船舶電力推進系統(tǒng)的要求,采用現(xiàn)代流行的控制算法來控制直流無刷電機。在DSP 中實現(xiàn)模糊PID 算法,根據(jù)設(shè)定的轉(zhuǎn)速的參考值和傳感器反饋的實際值以及變化速率進行實時控制。同時,控制輸出的PWM 控制信號,通過采樣每相定子電流信號和定子反電動勢信號來控制直流無刷電機的輸出轉(zhuǎn)矩。
通過利用模糊推理,模糊自適應(yīng)PID 控制器能夠根據(jù)誤差及其動態(tài)變化率實時調(diào)整PID 控制器參數(shù),進一步提高電機控制系統(tǒng)的自適應(yīng)能力,從而獲得最佳的轉(zhuǎn)速響應(yīng)曲線[5]。圖5 為BLDCM 模糊自適應(yīng)PID控制器的結(jié)構(gòu)框圖。
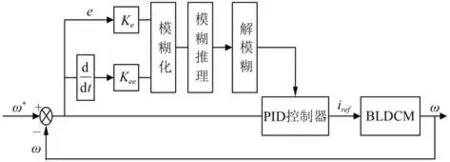
圖5 PID 模糊控制器原理圖Fig. 5 PID fuzzy controller schematic
2.4 實驗結(jié)果
在仿真實驗中,BLDCM 的參數(shù)為:額定電壓24 V,額定功率60 W,額定轉(zhuǎn)速3000 r/min,額定轉(zhuǎn)矩0.18 Nm,額定電流3.2 A,空載電流0.1 A,空載轉(zhuǎn)速4800 r/min。在額定負(fù)載轉(zhuǎn)矩下,分別采用傳統(tǒng)PID 控制及模糊自適應(yīng)PID 控制策略,對BLDCM 整體仿真模型進行仿真,得到不同轉(zhuǎn)速給定下的轉(zhuǎn)速響應(yīng)變化曲線,同時統(tǒng)計了不同響應(yīng)時間對應(yīng)的轉(zhuǎn)速變化,如圖6 所示。
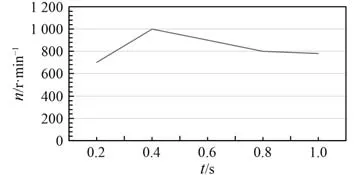
圖6 轉(zhuǎn)速變化曲線Fig. 6 Speed change curve
為了進一步驗證無刷直流電機控制系統(tǒng)的性能,搭建基于模糊自適應(yīng)的 BLDCM 控制系統(tǒng)實驗平臺。在實驗過程中使用1 臺額定轉(zhuǎn)速為2 500 r/min 的電機,供電電流和電壓分別為5.4A 和DC48V,轉(zhuǎn)矩為4.5 N·m。實驗過程中所使用電機的參數(shù)如下∶額定轉(zhuǎn)速為3000 r/min,額定電壓為24 V,額定電流為3.2 A,額定轉(zhuǎn)矩為0.18 Nm。在實驗過程中不斷改變實驗條件,并得到不同條件下傳統(tǒng)PID 控制和模糊自適應(yīng)PID 控制的實驗結(jié)果,如圖7 所示。
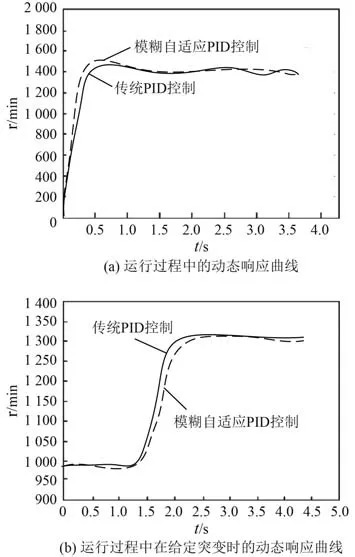
圖7 實驗結(jié)果Fig. 7 The results of the experiment
從圖7(a)可以看出,無刷直流電機2 種算法下響應(yīng)速度不同。在傳統(tǒng)的PID 算法中,BLDCM 的響應(yīng)時間相對于模糊自適應(yīng)的PID 算法而言要慢,也就表明響應(yīng)速度較慢。從圖7(b)看出,在轉(zhuǎn)速從大約1000 r/min 上升到至1300 r/min 時,模糊自適應(yīng)的PID 算法控制的直流電機更平穩(wěn)、更快速地提升至指定轉(zhuǎn)速,可以說明在緊急情況下,模糊自適應(yīng)的PID 算法控制的無刷直流電機更可靠。
由上述實驗結(jié)果可知,本文基于DSP 的無刷直流電機控制系統(tǒng)的靜態(tài)性能和動態(tài)性能都表現(xiàn)良好,響應(yīng)時間短且穩(wěn)態(tài)誤差很小,可以較好地在船舶推進系統(tǒng)中實現(xiàn)應(yīng)用。當(dāng)在航行過程中遇到緊急情況時,采用的模糊自適應(yīng)控制算法,使得電機可以更快地進行響應(yīng),提升了航行的安全性和穩(wěn)定性。
3 結(jié) 語
本文采用DSP 作為核心控制芯片,對無刷直流電機的相關(guān)控制技術(shù)進行研究,通過模糊自適應(yīng)PID算法對無刷直流電機進行控制。實驗結(jié)果表明,該系統(tǒng)可以為船舶的航行提供更好的轉(zhuǎn)矩和轉(zhuǎn)速,電機性能穩(wěn)定、可靠,為船舶航行中的安全性和穩(wěn)定性提供了保障。后續(xù)可以在算法方面進行優(yōu)化,進一步提高電機性能。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06