農(nóng)機深松整地作業(yè)監(jiān)測系統(tǒng)的設(shè)計
2023-07-21 10:36:34龐國紅
南方農(nóng)機 2023年15期
龐國紅
(昌圖縣亮中橋鎮(zhèn)農(nóng)業(yè)綜合服務(wù)中心,遼寧 鐵嶺 112524)
農(nóng)機深松整地作業(yè)能夠打破犁底層,使松土層加厚,對耕層結(jié)構(gòu)進行改善,以此使土壤蓄水保墑能力得到增強,對土壤進行改善,實現(xiàn)農(nóng)作物的增產(chǎn)。深松作業(yè)的原則為先作業(yè)后補助,利用各地方的農(nóng)機管理機構(gòu)工作人員監(jiān)管農(nóng)機深松作業(yè)量。但是,傳統(tǒng)作業(yè)監(jiān)管是通過人工測量,增加了工作量,監(jiān)測覆蓋面比較窄。農(nóng)機深松作業(yè)遠程監(jiān)測系統(tǒng)綜合無線通信技術(shù)、衛(wèi)星定位技術(shù)、計算機測控技術(shù)等,能夠?qū)ψ鳂I(yè)面積和深松作業(yè)質(zhì)量進行檢測,以此為深松作業(yè)的補助提供基礎(chǔ)[1]。
1 系統(tǒng)的設(shè)計原理
農(nóng)機深松整地作業(yè)監(jiān)測系統(tǒng)將移動通信、地塊矢量圖層、衛(wèi)星遙感技術(shù)等作為基礎(chǔ),本文設(shè)計的系統(tǒng)由深松作業(yè)服務(wù)平臺和農(nóng)機具終端構(gòu)成,如圖1 所示。農(nóng)機具終端在深松犁和拖拉機的硬件模塊中,由GPS 天線、角度傳感器、控制器和顯示器構(gòu)成。通過農(nóng)機具終端實現(xiàn)位置定位和耕深計算,利用移動網(wǎng)絡(luò)使數(shù)據(jù)在服務(wù)平臺中上傳,實現(xiàn)統(tǒng)一管理。另外,在駕駛室中安裝顯示器,實現(xiàn)耕深的實時顯示,指導(dǎo)機手深松作業(yè)。
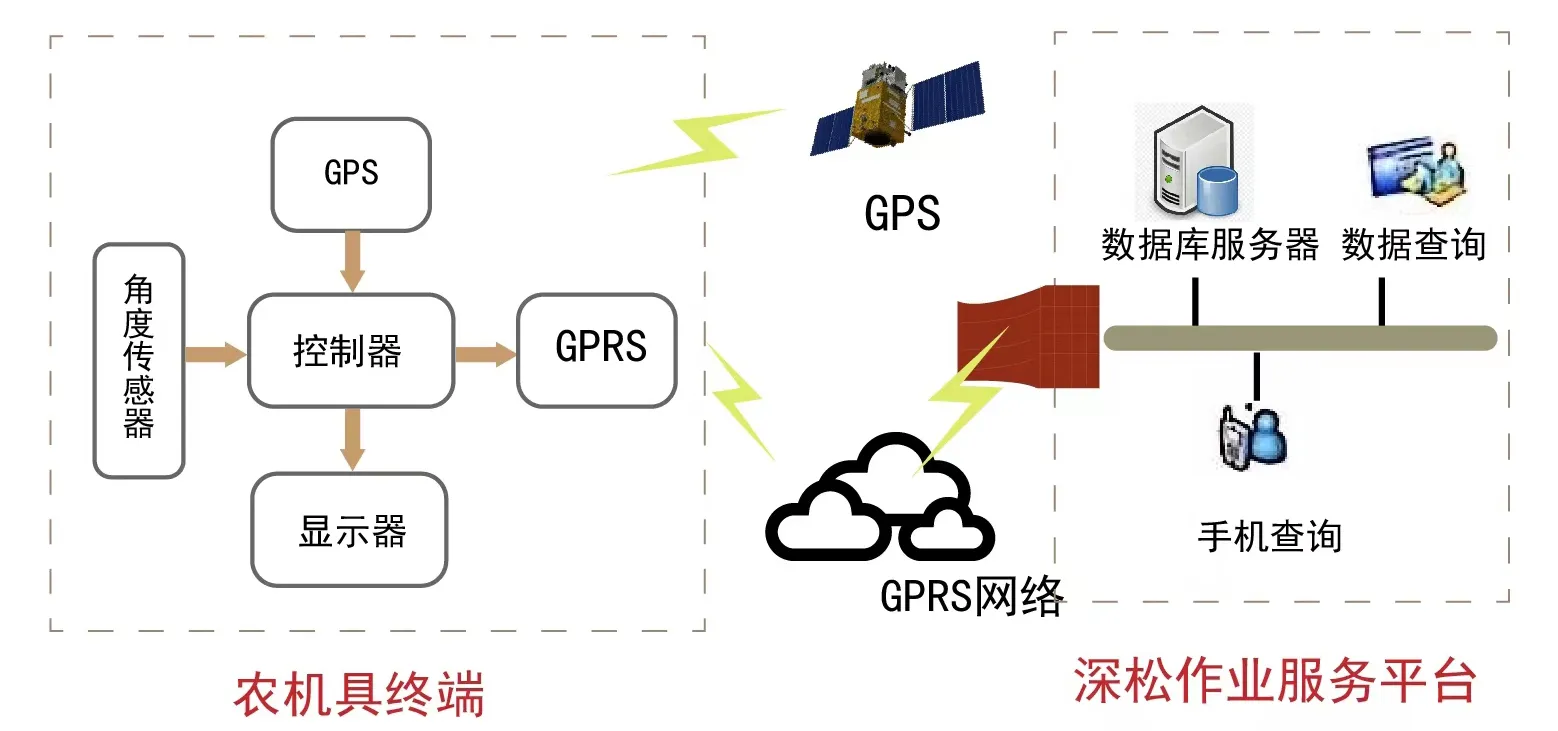
圖1 系統(tǒng)的總體架構(gòu)
使用角度傳感器的間接測量方法實現(xiàn)耕深監(jiān)測,利用防水防塵實現(xiàn)角度傳感器模塊的封裝,在懸掛機構(gòu)、車身水平和深松機具橫梁位置安裝[2]。利用角度傳感器對車身、深松機具角度變化進行檢測,再以幾何關(guān)系對耕深值進行計算。
2 系統(tǒng)的詳細設(shè)計
2.1 卡爾曼濾波姿態(tài)解散
利用傾角感應(yīng)器和超聲波傳感器構(gòu)成耕深數(shù)據(jù)收集設(shè)備,利用不同的作業(yè)參數(shù)實現(xiàn)耕深信息的實時更新,從而為耕深信息實時監(jiān)測提供數(shù)據(jù)基礎(chǔ)。電源模塊為供電系統(tǒng),能夠為設(shè)備與傳感器提供輸出裝置。在實現(xiàn)傳感器測距試驗過程中,能夠改變地面姿態(tài)角和內(nèi)部敏感元件,此傾角變化所產(chǎn)生的脈沖信號和模擬信號在處理后就會轉(zhuǎn)換為數(shù)字信號輸出。使用MPU6050 傾斜角感應(yīng)器模塊,測距效果穩(wěn)定,具有較高的測試精度。在MPU6050傾角傳感器模塊內(nèi)部設(shè)計穩(wěn)壓電路,能夠支持3.3 V/5 V電源模塊。此設(shè)計能夠在大田深松作業(yè)中使用,并且此模塊能夠設(shè)置I2C 端口,客戶端利用I2C端口實現(xiàn)底層應(yīng)用的開發(fā)。在模塊中實現(xiàn)數(shù)字濾波電路的設(shè)置,使傳感器的準確度得到提高,降低噪聲對于測量數(shù)據(jù)的干擾。動態(tài)過程中的系統(tǒng)能夠通過卡爾曼濾波對系統(tǒng)真實狀態(tài)進行監(jiān)測,如果精準度在0.01°以上,安全性就比較高。利用姿態(tài)計算對姿態(tài)坐標系進行修改,調(diào)整姿態(tài)角度,通過此角度將飛行器狀態(tài)數(shù)據(jù)反映出來[3]。設(shè)計地理坐標系n系,x軸為東,y軸為北。MPU6050定義中的b系為載體坐標系,使n系與b系的轉(zhuǎn)動狀態(tài)作為b系狀態(tài),使用3×3的姿態(tài)矩陣T表示旋轉(zhuǎn)關(guān)系,四元數(shù)Q=(q0,q1,q2,q3),表示狀態(tài)的四要素為歸一化,公式為:
結(jié)合姿態(tài)偏差6 態(tài)卡爾曼濾波算法的校正進行計算,結(jié)果表明上述算法與傳感器能夠在深松作業(yè)過程中對運動進行測量。
2.2 農(nóng)機動態(tài)設(shè)計
將機具傳感器與深度傳感器安裝在模塊中,通過無線網(wǎng)絡(luò)收集農(nóng)機深松整地作業(yè)信息。此模塊能夠?qū)崟r監(jiān)控農(nóng)機深松作業(yè),從而分析作業(yè)過程中的深松情況,解決農(nóng)機深松作業(yè)的問題[4-5]。利用此功能,農(nóng)機手能夠?qū)崟r分析地理信息,實現(xiàn)地圖的放大、縮小與分級顯示,以GPS 位置地圖定位。此功能模塊的位置信息包括用戶位置和農(nóng)機位置,作業(yè)位置信息如圖2所示。

圖2 作業(yè)位置信息
2.3 輪作查詢
通過輪作查詢模塊能夠查詢輪作地塊數(shù)據(jù),手機定位信息和服務(wù)器實現(xiàn)交互處理,在作業(yè)數(shù)據(jù)服務(wù)器中上傳位置信息,實現(xiàn)作業(yè)數(shù)據(jù)的對比。在地圖中通過指定位置與當前位置實現(xiàn)專題輪作圖的設(shè)置,根據(jù)機載服務(wù)器做輪作圖,實現(xiàn)服務(wù)功能。
2.4 作業(yè)統(tǒng)計
作業(yè)統(tǒng)計模塊能夠?qū)崿F(xiàn)農(nóng)機深松作業(yè)統(tǒng)計查詢,達標面積和作業(yè)面積為主要參數(shù),所以此參數(shù)要顯示在此模塊中。系統(tǒng)顯示默認當月作業(yè)信息,能夠切換月份并且查詢。在月統(tǒng)計信息欄中,明細頁能夠顯示每天作業(yè)面積,報表頁能夠?qū)⑥r(nóng)機作業(yè)量達標比顯示出來,對任何一條記錄點擊都能夠進入到詳情頁[6]。
2.5 用戶中心
用戶中心模塊能夠?qū)€人信息進行查看和管理,主要功能為:1)個人信息。包括電話、姓名、所屬省、拖拉機數(shù)量、家庭住址等。2)密碼更改。農(nóng)機手手機號為用戶默認的登錄密碼,能夠利用此功能對個人登錄密碼進行修改。3)用戶反饋。機械手反饋農(nóng)機深松整地作業(yè)的監(jiān)管系統(tǒng)意見,反饋實際作業(yè)數(shù)據(jù)和系統(tǒng)作業(yè)信息。當其他軟件和硬件出現(xiàn)問題的時候,也能夠利用此模塊反饋信息。4)對系統(tǒng)版本號和版權(quán)信息進行記錄。
2.6 耕深測量
因為是在大田中開展深松作業(yè),作業(yè)環(huán)境比較特殊,在日常工作中要對其實用性與便利性進行考慮。分析拖拉機中液壓懸吊系統(tǒng)結(jié)構(gòu)機理,尋找拖拉機工作過程中深松機提鏟落鏟的三點懸掛結(jié)構(gòu)運動規(guī)律,根據(jù)作業(yè)深度構(gòu)成的數(shù)學集合模擬和分析,得出計算方式和共識。深松設(shè)備通過拖拽機下拉桿和深松機械懸架裝置連接,在作業(yè)過程中對拖拽機下拉桿位置進行調(diào)整,從而調(diào)整土壤深度,保證深松鏟的入土傾斜度。分析深松機構(gòu)造和懸吊系數(shù)幾何模型,選擇土地耕深測量的方法。在深松機大梁中安裝超聲波設(shè)備,將傾角感應(yīng)器設(shè)置在犁架中,利用深松機和上下水平拉桿作業(yè)時的運動情況,對耕深情況進行測量[7-8]。
2.7 農(nóng)機信息服務(wù)
此功能接近基層實踐,為農(nóng)機深松作業(yè)服務(wù)。此功能涉及農(nóng)機深松信息化監(jiān)管問題和常見的錯誤碼含義。農(nóng)機手在空閑的時候能夠翻閱電子手冊,掌握農(nóng)機深松基本情況,初步判斷農(nóng)機深松信息化監(jiān)管設(shè)備故障。在后期,農(nóng)機信息服務(wù)模塊貼近實際電子手冊,使農(nóng)機手在深松作業(yè)前利用電子手冊學習簡單規(guī)范化的作業(yè)方法。實現(xiàn)信息反饋頁面的設(shè)置,機手能夠在農(nóng)機深松作業(yè)信息化的過程中,在平臺反饋軟硬件問題,從而能夠更加貼近于實際。
3 田間試驗和分析
為了驗證系統(tǒng)作業(yè)面積和深度的監(jiān)測精度,對該系統(tǒng)進行測試。在進行測試的過程中,使用1S-230型深松機開展試驗,田間試驗場景如圖3所示。

圖3 田間試驗場景
3.1 作業(yè)深度試驗
將終端設(shè)置在深松機組中,操作拖拉機懸掛機構(gòu),使深松機耕深從淺到深。在整個過程中,每隔一段距離進行測量,操控機組行駛平穩(wěn)之后,深松機停車不動,準確值為人工撥土的測量耕深,并對比監(jiān)測系統(tǒng)的結(jié)果。如果機組逐漸接近耕深,那么土壤值就是機組作業(yè)中的最大深度(即機組和耕深的距離越來越近的話,機組作業(yè)最大深度不能夠超過土壤值),使耕深能夠從深到淺,重復(fù)以上監(jiān)測過程[9-10]。測試數(shù)據(jù)如圖4 所示,通過田間試驗可以看出,系統(tǒng)作業(yè)的深度測量誤差在1.18 cm 以下,均方根誤差在0.64 cm以下。

圖4 測試數(shù)據(jù)
3.2 作業(yè)面積試驗
通過規(guī)則矩形試驗地,將終端安裝在深松機組中,實現(xiàn)往復(fù)直線作業(yè)。將自動導(dǎo)航系統(tǒng)安裝到拖拉機中,能夠使作業(yè)過程中不重不漏。在開展田間試驗的過程中,對系統(tǒng)測量面積進行記錄,使用高精度RTK-GNSS 測量試驗地塊面積,對以上試驗過程進行重復(fù)測量。表1 為測試數(shù)據(jù),田間試驗表明,該系統(tǒng)作業(yè)面積測量誤差和平均誤差均不超過0.91%、0.53%。

表1 測試數(shù)據(jù)
4 結(jié)語
農(nóng)機深松作業(yè)遠程監(jiān)測系統(tǒng)能夠在農(nóng)機生產(chǎn)作業(yè)監(jiān)測過程中使用現(xiàn)代信息技術(shù),從而精準監(jiān)測深松機的作業(yè)面積和質(zhì)量,使傳統(tǒng)驗收過程中工作量大和監(jiān)測效率比較低的問題得到解決,降低監(jiān)管壓力,提高農(nóng)機作業(yè)管理信息化水平。
猜你喜歡
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中華手工(2017年2期)2017-06-06 23:00:31
故事大王(2016年7期)2016-09-22 17:30:08
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
中外會展(2014年4期)2014-11-27 07:46:46
兒童故事畫報(2013年3期)2013-06-24 05:40:30
小哥白尼·軍事科學畫報(2009年9期)2009-09-14 03:18:56