大氣環境監測衛星雙偏振儀器校飛驗證
2023-07-17 03:12:44李朕陽趙旭楓石新宇劉振海宋茂新羅海燕史書明雷雪楓
上海航天 2023年3期
關鍵詞:測量
李朕陽,洪 津,趙旭楓,石新宇,劉振海,宋茂新,羅海燕,鄒 鵬,史書明,雷雪楓
(1.中國科學院合肥物質科學研究院 安徽光學精密機械研究所,安徽 合肥 230031;2.中國科學院 通用光學定標與表征技術重點實驗室,安徽 合肥 230031;3.上海衛星工程研究所,上海 201109)
0 引言
目前,全球尺度的氣溶膠和云特性參數及其分布主要依賴于空間遙感器獲取[1-5]。偏振信息對大氣顆粒物物理特征具有高度敏感性,利用該特點進行偏振探測可以為大氣遙感提供獨立的信息維度,有效提高云和氣溶膠的探測能力[6-11]。近年來,多臺不同測量原理的偏振載荷搭載在同一衛星觀測平臺,通過優勢互補進而獲取更高質量的數據產品,成為偏振遙感技術的發展熱點。
國際上,HARP-2+SPEXone/PACE 兩偏振載荷團隊[12]和SCAN POL+MSIP/Aerosol-UA[13-14]偏振載荷團隊都提出了進行同平臺偏振儀器交叉定標的構想。Aerosol-UA 集成了偏振掃描儀(Polarization Scanner,PS)和偏振探測儀(Multi Spectral Imaging Polarimeter,MSIP),并進行了一體化設計。在國內,大氣環境監測衛星上配置了5 臺有效載荷,是國內首次同時采用主動激光、多角度、偏振、多光譜和高光譜等多種探測手段,實現對大氣環境的高精度綜合探測。對于國際首次采用的主被動結合探測體制的效能、協同觀測及數據融合方法,需要在衛星發射前,在地面利用航空校飛的方式進行多載荷綜合協同觀測實驗驗證,以提高衛星發射入軌后的應用效能。中科院安徽光學精密機械研究所聯合中科院遙感所偏振應用團隊提出“偏振交火”概念[15-16],以多角度偏振探測儀(Directional Polarimetric Camera,DPC)[17-19]為主獲取高精度氣溶膠綜合探測參數。然而,DPC 的設計針對特定軌道高度,通過光楔運動補償實現像元配準,需要穩定的衛星平臺,導致DPC 的像元配準方案難以在航空平臺實現。因此,在飛行實驗中,將DPC 替換為同時偏振相機(Simultaneous Imaging Polarization Camera,SIPC),SIPC 通過框幅式成像覆蓋高精度偏振掃描儀(Particulate Observing Scanning Polarimeter,POSP)[20-21]幅寬,POSP 獲取的高精度探測信息可以傳遞到SIPC,進而提高SIPC 的偏振探測能力。
本文針對同平臺偏振儀器航空觀測數據,在簡要介紹雙偏振儀器工作原理的基礎上,較詳細描述了其系統組成、數據預處理、視場匹配和偏振交叉定標方法,并評估和展示了部分校飛實驗結果,可為儀器的性能評估和下一步的星載數據應用提供支持。
1 儀器組成與數據預處理方法
兩偏振儀器安裝在同一基板上,其系統組成框如圖1 所示。
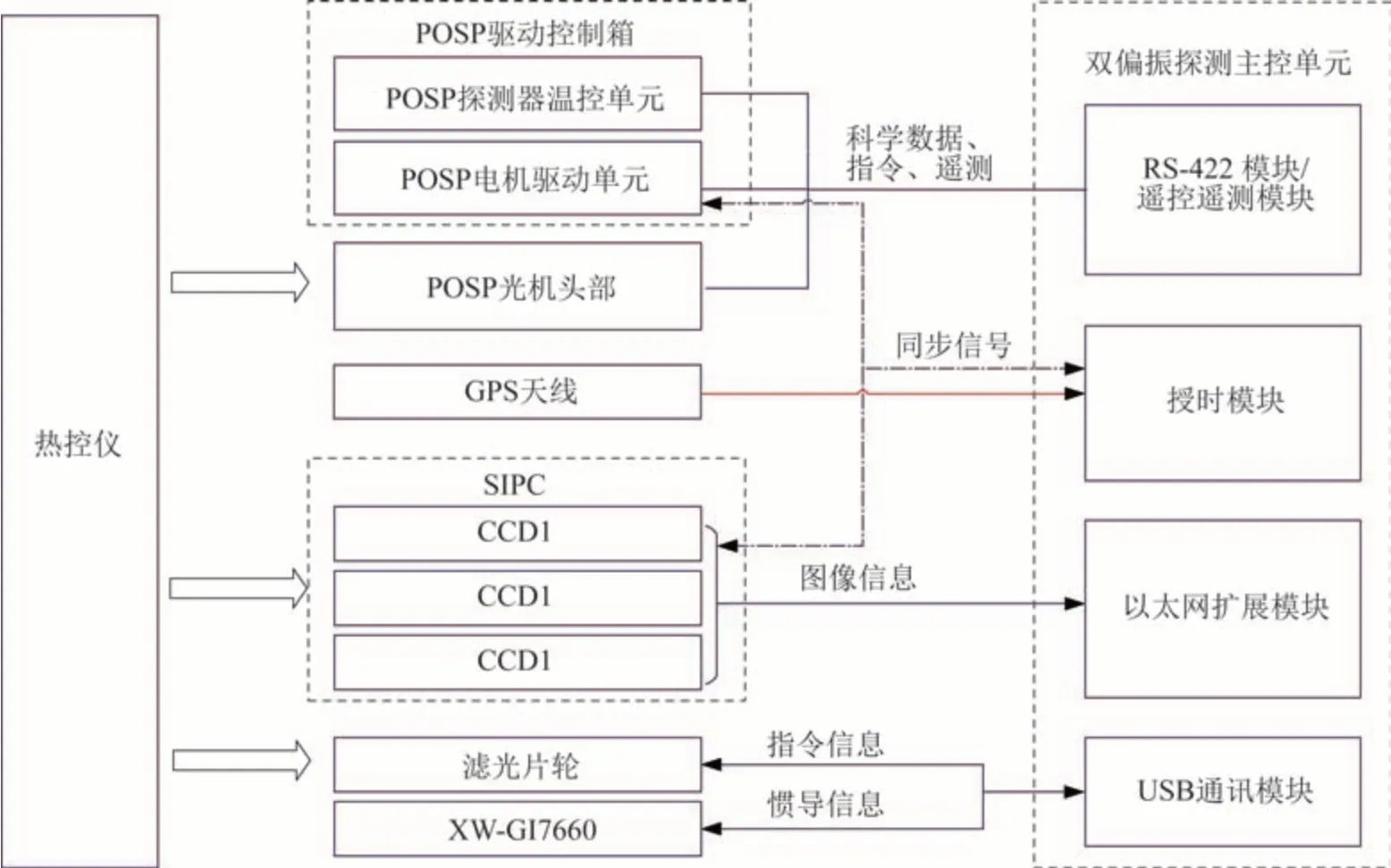
圖1 同平臺偏振儀器組成框Fig.1 Block diagram of polarization instruments on the same platform
同平臺偏振儀器由雙偏振探測主控單元、POSP光機頭部、SIPC、驅動控制箱、熱控儀和慣導等單元構成。主控單元控制系統工作流程,完成指令接收與譯碼、遙測采樣和科學數據的存儲;驅動控制箱中探測器溫控用于抑制POSP 紅外測量通道的暗電流;電機驅動用于驅動控制掃描電機;熱控儀用于控制POSP 光機頭部各組件和SIPC 的工作溫度,保證溫度敏感部組件的正常工作;本次航空校飛選用XW-GI 7660慣性導航單元,可提供多參數導航信息。同平臺偏振儀器的主要技術指標見表1。

表1 同平臺偏振儀器主要技術指標Tab.1 Main technical indexes of polarization instruments on the same platform
1.1 POSP 測量模型
POSP 采用分孔徑與分振幅結合的同時偏振測量方法,可獲得4 個不同振動方向(0°、90°、45°和135°)的線偏振光,進而解析出目標線偏振態的前3 個Stokes 參量(I,Q,U)。POSP 光學系統由前置正交掃描鏡組、望遠系統組件、Wollaston 棱鏡、分色片組件、聚焦鏡組件、濾光片及雙元探測器等構成,其測量模型可表示為[22]
式中:S0和S90、S45和S135為POSP 暗參考校正后同一波段4 個偏振方向的數字DN 值;K1為S0和S90通道內相對響應;K2為S45和S135通道內相對響應;ε1、ε2為Wollaston 棱鏡方位角偏差;
α1、α2為Wollaston 棱鏡的消光系數,可表示為
式中:e1、e2為Wollaston 棱鏡的消光比;qinst、uinst為POSP 自身的起偏量;ξ(p)包含被測目標的偏振信息,需迭代求解。
1.2 SIPC 測量模型
SIPC 檢偏方向分別為0°、45°和90°,其偏振測量模型可表示為[23]
式中 :I0=RD0/Ar、I45=RD45/ArK1和I90=RD90/ArK2為暗背景和絕對輻射定標系數校正后的三檢偏方向的信號值,RD0、RD45和RD90為同一波段不同測量通道扣除暗背景后的信號值,K1為0°和45°偏振方向增益系數,K2為0°、90°偏振方增益系數,Ar為絕對輻射定標系數;γ、τ為各檢偏方向線偏振片的退偏因子。
1.3 數據預處理方法
同平臺雙偏振儀器需對原始探測數據進行分類、解析和篩選,這是獲取準確探測信息不可或缺的重要步驟。
1.3.1 POSP 數據預處理方法
1)POSP 原始數據校驗包括儀器工作狀態、平臺參量和偏振通道測量有效性檢測;2)原始數據校正主要包括暗背景的扣除、增益校正和紅外測量通道的溫度校正;3)結合數字高程模型和儀器安裝矩陣,將探測數據中的時間碼與慣性導航系統GPS 時間碼進行匹配,獲取POSP 每個掃描點探測器指向矢量投影的經緯度和高度信息;4)根據偏振和輻射定標系數,通過POSP 測量模型獲取測量目標的光譜偏振輻射信息。
1.3.2 SIPC 數據預處理方法
1)對SIPC 采集圖像的數量、各偏振測量通道的有效性、儀器工作狀態和平臺參量進行檢驗和篩選;2)對原始圖像按照增益進行分類和本底扣除,并完成均勻性和一致性校正;3)通過圖像配準方法對SIPC 三測量通道數據進行配準,消除其視場差異對偏振輻射信息解析的影響;4)結合數字高程模型和儀器安裝矩陣,將原始圖像對應的GPS 時間碼與慣性導航系統時間碼進行匹配,獲取SIPC 每個像元矢量投影的經緯度和高度信息;5)根據偏振和輻射定標系數,通過SIPC 測量模型獲取測量目標的光譜偏振輻射信息。同平臺偏振儀器數據預處理流程如圖2 所示。
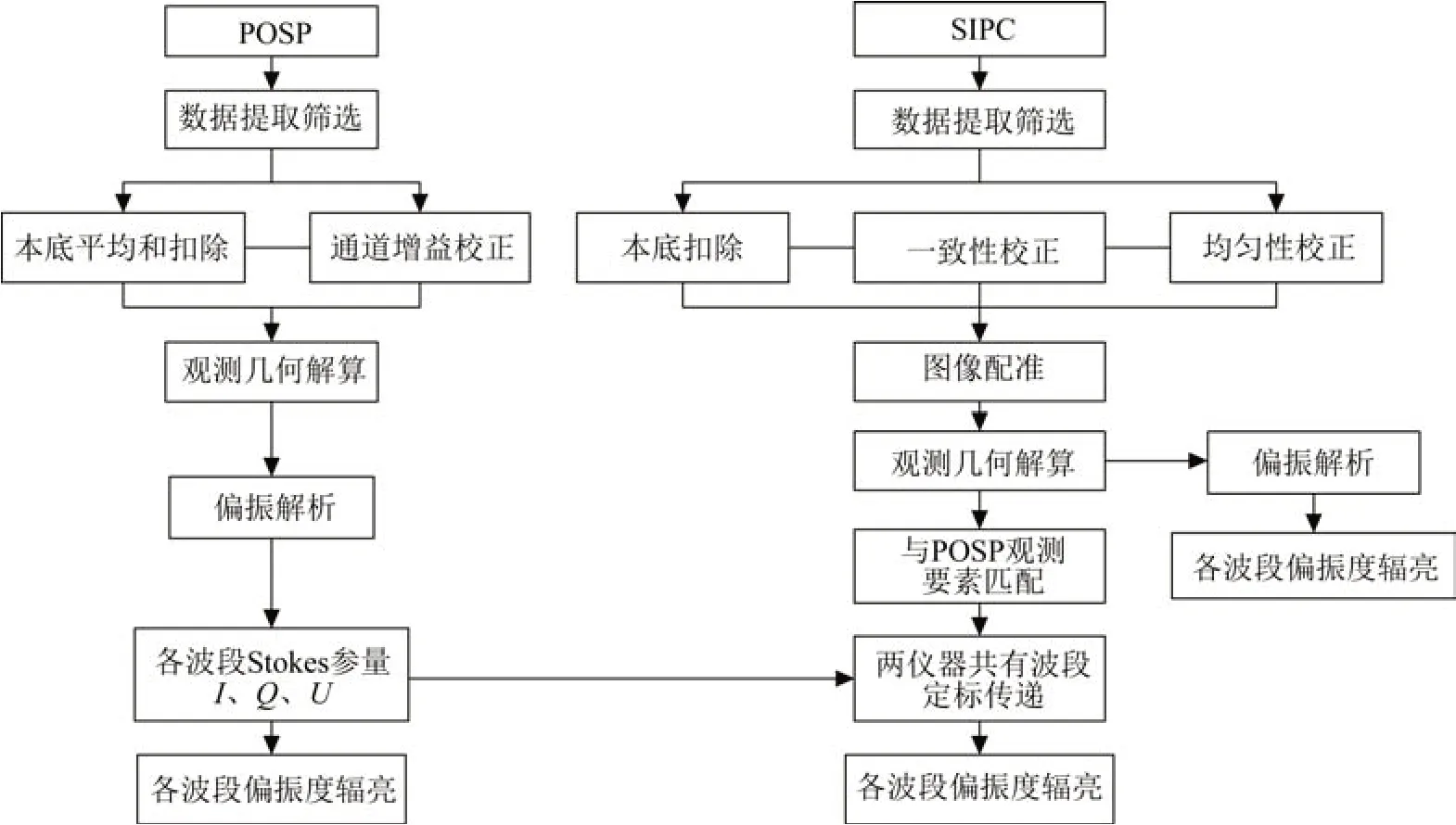
圖2 同平臺偏振儀器數據預處理流程Fig.2 Data preprocessing flow of polarization instruments on the same platform
2 視場匹配及實現
同平臺偏振儀器的視場匹配保證2 個儀器獲取的探測信息具有相同的觀測目標,是2 個儀器交叉定標和地氣解耦合交火的前提。2 個儀器視場匹配示意圖如圖3 所示。航飛實驗前對同平臺偏振儀器進行了地面驗證實驗,結果表明,POSP 和SIPC 共有波段獲取的偏振輻射數據具有較好的一致性[24],這為視場匹配提供了數據支持。

圖3 同平臺偏振儀器視場匹配Fig.3 Field matching diagram of polarization instruments on the same platform
2.1 視場匹配方法
在獲取同平臺偏振儀器預處理數據基礎上,需進一步實現兩儀器共有波段數據的視場匹配,為后續定標傳遞提供輸入,具體實現描述如下:1)根據航空平臺飛行高度、GSP 時間碼和姿態等信息,進行數據匹配;2)POSP 瞬時視場內各位置空間響應具有相同的權重,以此為依據建立拖影權重模板[25];3)通過權重模板將SIPC 數據重采樣,保證兩儀器數據具有相同的空間分辨率,再計算POSP 指向矢量與SIPC 待匹配像元間的歐氏距離;4)獲取同平臺偏振儀器視場匹配位置,并通過GPS 時間碼和慣導數據進行校正。視場匹配對應過程如圖4所示。

圖4 同平臺偏振儀器視場匹配過程Fig.4 Field matching process of polarization instruments on the same platform
2.2 視場匹配結果分析
選3 幅連續的SIPC 圖像,對同一組POSP 星下點附近11 個采樣點數據進行匹配,通過尋找最小歐式距離在像元的位置即可確定匹配結果位置。3 幅SIPC 圖像與POSP 數據進行視場匹配的歐式距離熱度圖以及對應的SIPC 原始圖像如圖5 所示。從圖中可知,3 幅歐式距離熱度圖中較小的區域均對應原始圖像中的山谷,且匹配程度較高區域的移動趨勢與航線軌跡趨勢一致,說明選取的POSP 匹配采樣點視場投影范圍與SIPC 連續采樣數據視場匹配結果一致。

圖5 多幅連續SIPC 圖像對同一組POSP 數據進行匹配Fig.5 Matching of multiple continuous SIPC images to the same set of POSP data
進一步選取1、3、5 組不同位置的SIPC 圖像與多組POSP 數據進行視場匹配,如圖6 所示。從圖中可以看出,POSP 星下點中心位置集中分布在SIPC 425 行、630 列附近,同時圖中存在個別離散點,即誤匹配點,導致誤匹配的主要原因是地表特征變化不明顯,如圖6(b)所示。誤匹配結果選取的為海洋數據,地表的均勻性較強,難以通過比較歐式距離大小的方法選取一致性最強的像元作為視場匹配結果。因此,為提高視場匹配方法的靈敏度,增加視場匹配結果的可信度,一般須選取地物特征豐富的數據進行視場匹配,避免多個位置的一致性程度相似對匹配結果造成影響。

圖6 多幅連續SIPC 圖像對同多組POSP 數據進行匹配Fig.6 Matching of multiple continuous SIPC images to multiple sets of POSP data
對于視場匹配結果的驗證,使用連續多個POSP 星下點投影視場范圍內的SIPC 像元數據與拖影權重模板進行加權卷積,得到與POSP 星下點分辨率一致的SIPC 加權結果,再將這些結果與對應的POSP 星下點采樣數據進行相關性驗證。由于不能確定準確的POSP 星下點位置與相機像元位置的對應關系,在進行SIPC 像元數據加權卷積時,將圖6(a)中匹配結果主要分布區域內的每一個像元都作為起始像元位置,對每個起始像元位置得到的SIPC 加權卷積結果都與POSP 數據作相關性系數計算,得到如圖6(c)所示的相關性系數熱度分布圖。圖中的每個坐標分別對應不同的起始位置像元,從相關性系數的分布趨勢中可以看出相關性最高的位置集中在匹配結果的中心區域,因此選取相關性最大的像元起始位置作為準確的參考視場匹配結果(425 行,630 列),其相關性系數為0.997。多組匹配位置與參考位置的平均絕對誤差約為0.12 個POSP 像元。
3 偏振交叉定標方法及實現
3.1 偏振交叉定標方法
由SIPC 測量模型可得[23]
可以通過POSP 探測的IPOSP、qPOSP和uPOSP對空間響應匹配后SIPC 對應像元的Ar、K1和K2進行定標,可表示為
式中:Ar、K1和K2為POSP 與空間響應匹配后SIPC對應像元的交叉定標系數。
POSP 與SIPC 對應通道交叉定標流程如圖7所示,主要過程簡述如下:1)通過同平臺偏振儀器采樣時刻時間碼,篩選兩儀器相近時刻采樣數據;2)完成兩儀器的視場匹配;3)以POSP 的IPOSP、qPOSP和uPOSP為基準,通過式(6)得到SIPC 的交叉定標系數,完成定標傳遞。

圖7 POSP 與SIPC 對應通道交叉定標流程Fig.7 Cross calibration process of the corresponding channels of POSP and SIPC
3.2 偏振交叉定標結果分析
2019 年3 月在N38.92°~N41.12°,E119°~E121°范圍內,進行了航空校飛實驗,共獲取了5 個架次的有效實驗數據,航線上涵蓋了海洋、海岸線、山地和平原等多種典型地表,飛行航線如圖8 所示。

圖8 航空校飛實驗航線Fig.8 Aircraft’s course of the in-flight experiment
選取多組同平臺偏振儀器星下點數據計算交叉定標系數,進一步取計算結果的均方根值作為航空定標傳遞系數,結果見表2。

表2 航空交叉定標系數結果Tab.2 Results of the in-flight cross calibration coefficients
為了驗證交叉定標系數的有效性和準確性,將其應用于SIPC 測量模型,計算輻亮度和偏振度,并與POSP 對應波段的偏振解析結果進行對比。對比結果如圖9 所示。2 個儀器的輻亮度偏差ΔL=100×(LSIPC-LPOSP)/LPOSP、偏振度偏差 ΔP=PSIPC-PPOSP。

圖9 同平臺偏振儀器交叉定標結果Fig.9 Cross calibration results of polarization instruments on the same platform
從圖9 可以看出,海洋數據的輻亮度相對較低而偏振度較高,陸地數據則相反,670 nm 通道兩儀器星下點數據變化趨勢具有較好的一致性,進一步通過數據偏差的均方根值評估其一致性。結果表明,陸地地表SIPC 相對于POSP 的輻亮度偏差為2.537 2%,偏振度偏差為0.012 5;海洋地表SIPC 相對于POSP 的輻亮度偏差為9.284 1%,偏振度偏差為0.042 5。陸地數據的一致性優于海洋,主要是由于SIPC 陸地數據的視場匹配精度和信噪比高于其海洋數據。
4 結束語
本文針對同平臺偏振儀器航空校飛實驗的原理、儀器組成、數據預處理、視場匹配和偏振交叉定標方法進行介紹,并評估和展示了部分實驗結果,通過校飛實驗,初步驗證了偏振交火技術方案的可行性,突破了高精度偏振掃描儀與偏振相機之間非等權重像元匹配的關鍵技術,完成了非均勻校正場的在軌輻射與偏振交叉定標,實現了高精度偏振掃描儀對偏振相機的輻射定標系數、偏振定標系數的交叉定標傳遞,初步顯示了同平臺偏振儀器的應用潛力,積累了實驗經驗和數據,有助于大氣環境衛星發射后及早投入應用。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
