大氣環境監測衛星姿軌控分系統設計與在軌驗證
2023-07-17 03:12:56翟興輝張凱誠劉登嶺朱文山張艷召李利亮
上海航天 2023年3期
孫 尚,翟興輝,張凱誠,劉登嶺,朱文山,張艷召,李利亮
(1.上海航天控制技術研究所,上海 201109;2.上海市空間智能控制技術重點實驗室,上海 201109;3.上海航天技術研究院,上海 201109)
0 引言
大氣環境監測衛星是我國首顆大氣環境綜合探測衛星,采用升交點地方時為13:30 的太陽同步回歸軌道,攜帶了大氣探測激光雷達、高精度偏振掃描儀、多角度偏振成像儀、紫外高光譜大氣成分探測儀及寬幅成像光譜儀等5 臺有效載荷,可以實現對大氣環境、水環境和生態環境的綜合監測。
衛星姿軌控分系統(Attitude and Orbit Control System,AOCS)在任務期間為衛星提供滿足載荷需求的對地觀測姿態,并將軌道維持在標稱軌道附近,同時保持太陽帆板對日定向跟蹤。載荷在姿態測量精度、姿態確定精度、姿態控制精度、壽命等方面對AOCS 提出了較高的要求,特別是星上搭載的大氣探測激光雷達要求AOCS 實現高精度姿態測量[1]。
大氣環境監測衛星繼承了上海航天技術研究院SAST 3000 平臺及現有設計[2-6],為滿足任務要求,AOCS 針對衛星和載荷特點,通過多頭星敏感器數據融合、一體化安裝與精密溫控技術,設計了高精度姿態測量方案;采用載荷姿態導引與干擾力矩補償設計,實現衛星在軌高精度、高穩定度運行。
本文介紹了大氣環境監測衛星AOCS 的體系結構、高精度姿態測量設計和穩態飛輪控制方案等內容,重點論述了姿態補償方法和在軌驗證情況。本文第1 章介紹了大氣環境監測衛星AOCS 的基本情況,包括分系統的主要功能、性能指標、硬件組成及控制模式等;第2 章詳細介紹了衛星AOCS 設計的亮點,包括高精度姿態測量設計和針對衛星與載荷特點的姿態控制方案優化;第3 章結合衛星在軌數據,分析了AOCS 的姿態測量與姿態控制精度,評估了優化設計的效果。
1 AOCS 簡介
1.1 分系統的主要功能與性能指標
大氣環境監測衛星AOCS 的主要功能包括:消除衛星星箭分離和電池陣展開帶來的擾動,建立穩定的三軸對地姿態;根據載荷的標定需求,進行導引姿態的跟蹤;自主檢測各單機故障并在故障后重構系統等。
AOCS 主要性能指標為:三軸慣性測量精度優于0.002°(3σ),三軸指向精度優于0.05°(3σ),三軸穩定度優于0.001(°)/s(3σ)。
1.2 分系統的硬件組成
根據衛星功能和性能指標要求,AOCS 由星敏感器、陀螺組合、三軸磁強計、太陽敏感器等姿態敏感器、控制器和反作用飛輪、磁力矩器、推力器(隸屬于推進分系統)和帆板驅動控制器(隸屬于太陽電池陣分系統)等執行機構組成,如圖1 所示。
圖中,星敏感器1 為高精度多頭星敏感器,具有3 個獨立的測量頭部,可以融合輸出姿態;5 個飛輪采用“三正裝+兩斜裝”的構型,飛輪X、Y、Z分別沿本體三軸安裝,飛輪S1、S2 沿不同方向相對本體軸傾斜安裝,5 個飛輪中的任意3 個均可提供三軸控制力矩。
1.3 分系統控制模式設計
為滿足任務需求,AOCS 共設計了11 個工作模式[7]:消初偏模式、等待模式、姿態消偏模式、噴氣控制對地定向模式、飛輪控制對地定向模式、軌道控制模式、飛輪控制安全模式、噴氣控制安全模式、磁輪聯控模式、星地大回路模式和測試模式。各模式間設計了跳轉條件,可自主或根據地面指令進行模式切換。
衛星采用三軸對地定向的整星零動量穩定方式,飛輪控制對地定向模式是衛星在軌的長期運行模式[8-9]。在該模式下,根據載荷需要進行姿態導引,需執行軌控任務時進入軌道控制模式,當衛星姿態失穩或出現能源危機時進入安全模式完成整星對日定向[10]。長期運行穩定運行時,衛星的姿態基準選用星敏感器與陀螺聯合濾波[11-12]確定的姿態角,軌道基準選用全球導航衛星系統(GNSS)的定軌數據[13],姿態導引采用偏流角導引[14],使用磁力矩器卸載飛輪角動量[15],選用太陽星歷數據驅動太陽電池陣對日跟蹤。
2 技術設計特點
2.1 高精度姿態測量設計
為保證大氣探測激光雷達的探測精度,AOCS姿態測量需滿足0.002°(3σ)的指標。為滿足姿態測量指標要求,AOCS 采取了以下措施:
1)星敏感器多個頭部數據融合[16-17]。采用星敏感器3 個頭部的融合姿態作為星敏感器的輸出姿態,并在頭部布局設計時使3 個頭部光軸兩兩間的夾角盡可能大,保證姿態融合的效果。
2)星敏感器3 個頭部采用一體化支架安裝[18]。為減小星敏感器安裝位置和在軌熱變形的影響,設計了3 個頭部一體化的安裝支架,支架采用熱膨脹系數較優的鋁基碳化硅材料。
3)對星敏感器支架采取精密溫控[19-20]。為星敏感器支架配備了精密溫控儀,將星敏感器安裝面溫度波動控制在±0.3 ℃,保證星敏感器安裝面波動量不超過2.5″。
2.2 飛輪控制方案設計
AOCS 的飛輪控制框,如圖2 所示。圖中:KP、KI、KI2為控制參數;I為星體慣量;φ、θ、ψ分別為三軸姿態確定角;φd、θd、ψd分別為三軸目標姿態角。大氣環境監測衛星在傳統飛輪PI 控制律[21-23]的基礎上,在衛星姿態穩定后又加入了對姿態角誤差的二次積分項,即圖中虛線框中的部分。二次積分項的加入,進一步提高了穩態下的姿態控制精度。
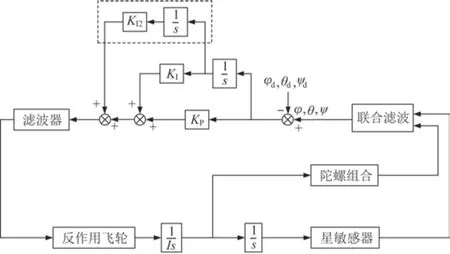
圖2 AOCS 飛輪控制框Fig.2 Simplified flywheel control chart of the AOCS
大氣環境監測衛星的零動量飛輪控制系統設計的特點還體現在以下幾個方面:
1)通過頻率隔離降低太陽電池陣撓性影響。大氣環境監測衛星單翼太陽電池陣基頻低至0.12 Hz 且耦合系數較大,其撓性的影響不可忽略。為降低太陽電池陣撓性振動及其對控制的影響[24-25],將控制系統的截止頻率設計為0.08 rad/s,比太陽電池陣基頻低一個數量級,實現了撓性振動頻率與控制頻率的隔離。
2)選擇合適的飛輪組合并設計偏置角動量以避免飛輪轉速過零。反作用飛輪轉速頻繁過零會影響系統穩定度和飛輪壽命[26],理論分析表明,選擇飛輪X、Z和一個斜裝飛輪接入閉環,并根據衛星受到的干擾情況設置一定的俯仰偏置角動量,可以實現穩態下接入閉環的3 個飛輪轉速均不過零。
3)根據載荷成像和標定需求設計了多種姿態導引方式,不同導引方式下的三軸目標姿態角不同。除了常規的無導引和偏流角導引外,大氣環境監測衛星還根據大氣探測激光雷達的標定需求設計了2 種導引方式:①滾動姿態偏置導引,滾動姿態小角度偏置,即φd=φ0≠0,θd=ψd=0,有助于大氣探測激光雷達對地面靶標的標定;② 偏航圓錐擺動導引,滾動、俯仰姿態分別隨時間t按余弦、正弦跟蹤,即φd=A1cosω1t,θd=A1sinω1t,ψd=0,其中,A1、ω1分別為導引姿態的幅值和頻率,有助于大氣探測激光雷達對激光指向的標定。
4)設計前饋補償力矩以抵消載荷啟動和停止時的干擾。大氣環境監測衛星上搭載的多個有效載荷都在進入光照區后開啟、離開光照區前關閉,其上旋轉部件的啟動和停止將帶來干擾。為此設計了前饋補償力矩如圖3 所示,以衛星進入光照區的時刻作為計時起點,其中的補償時刻t1與t2、補償持續時間Δt1與Δt2、補償力矩T1與T2均可地面注數配置。
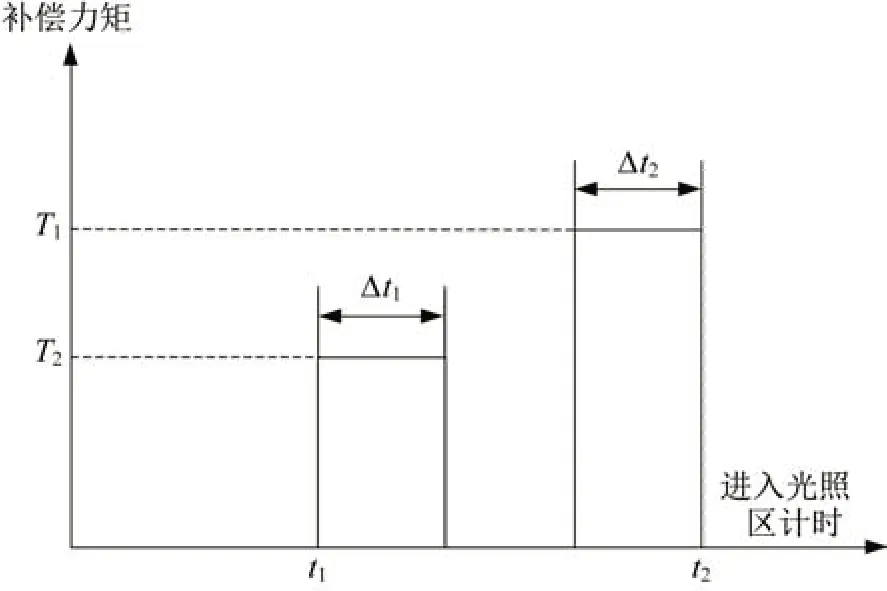
圖3 載荷補償力矩Fig.3 Schematic diagram of the payload compensation torque
3 在軌性能
大氣環境監測衛星于2022 年4 月16 日發射,入軌后AOCS 工作正常,按照飛行程序消除姿態偏差,建立了飛輪控制對地定向的長期工作模式,經過4 次軌道控制進入了標稱軌道,啟用偏流角導引并設置太陽電池陣偏置30°。在軌偏流角導引下星敏感器1 的測量誤差[27]和衛星的姿態確定角分別圖4 和圖5 所示。經統計,星敏感器1 各測量軸的測量誤差(3σ)分別為2.62″、1.98″和2.31″,滿足姿態測量優于0.002°(7.2″)的指標要求。
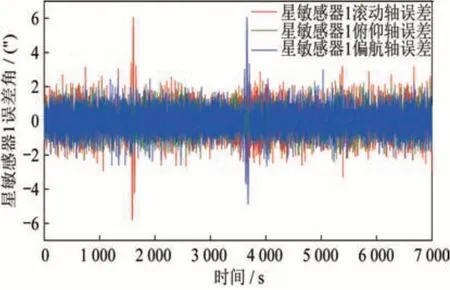
圖4 星敏感器1 的在軌測量誤差Fig.4 On-orbit measurement error of star sensor 1
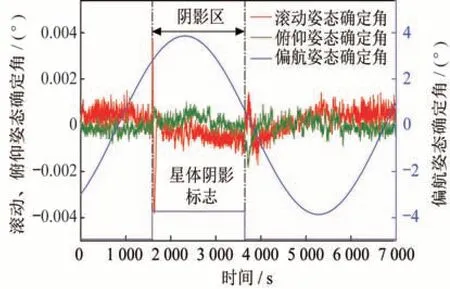
圖5 衛星在軌姿態確定角Fig.5 On-orbit attitude determination angles of the satellite
飛輪控制對地定向模式跟蹤偏流角時,衛星姿態角控制誤差和角速度控制誤差如圖6 所示。數據統計顯示,衛星姿態指向精度優于0.002°(3σ)以內,姿態穩定度優于0.000 6(°)/s(3σ)以內,優于0.05°(3σ)、0.001(°)/s(3σ)的設計指標。此外還可以看出,衛星本體的滾動、偏航方向受到太陽電池陣撓性影響較大,尤其是本體慣量較小的滾動方向;同時,衛星進出陰影前后太陽電池陣的熱顫[28]給滾動和偏航方向的姿態角帶來了較明顯的波動。
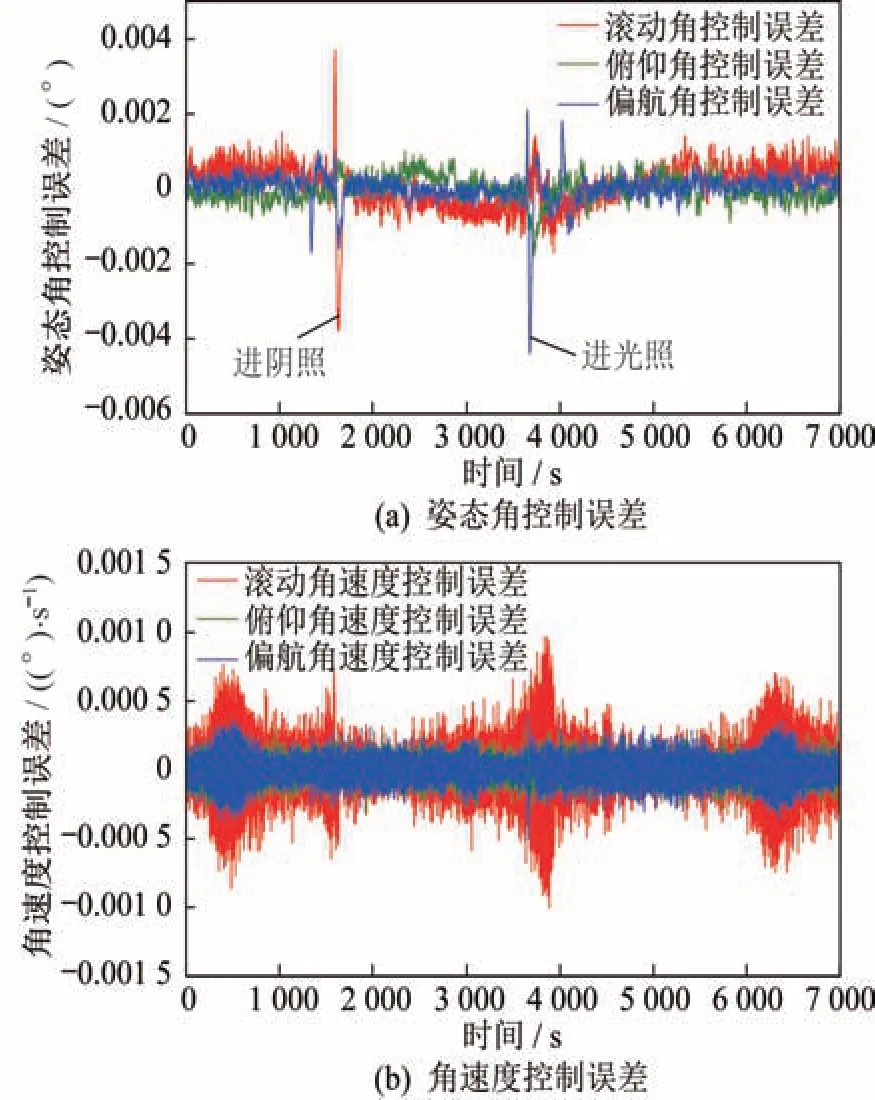
圖6 在軌姿態角與角速度控制誤差Fig.6 Control errors of the on-orbit attitude angle and angular velocity
衛星穩態飛輪控制對地定向時的飛輪返回轉速變化如圖7 所示,飛輪X、Z、S1 接入閉環并設置了-2.5 N·ms 的俯仰偏置角動量,實現了接入閉環的3 個飛輪轉速均不過0。
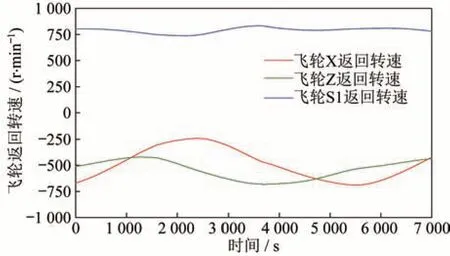
圖7 在軌飛輪返回轉速Fig.7 On-orbit feedback speed of the flywheels
載荷開始工作后,AOCS 根據載荷旋轉部件的啟動與停止規律,上注了載荷補償力矩參數并啟用了載荷補償力矩。以滾動軸為例,啟用載荷補償力矩前后的姿態對比如圖8 所示,可以看出載荷補償力矩抵消了大部分載荷旋轉部件干擾,使衛星在軌運行期間的姿態精度更高、更加平穩。
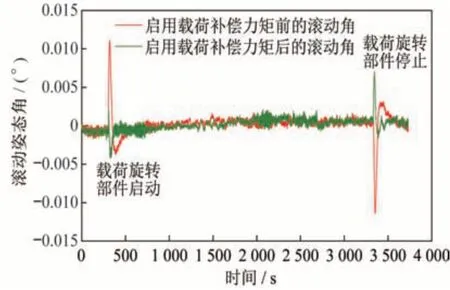
圖8 啟用載荷補償力矩前后的滾動角Fig.8 Roll angle before and after applying the payload compensation torque
4 結束語
大氣環境監測衛星AOCS 在繼承SAST 3000平臺控制系統的基礎上,根據衛星的任務特點,開展了分系統設計與研制工作,重點開展了高精度姿態測量設計和飛輪控制方案設計。在軌實測指標表明,衛星的姿態測量精度、指向精度和姿態穩定度均滿足指標要求。
猜你喜歡
軍事文摘(2023年10期)2023-06-09 09:15:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
藝術啟蒙(2018年7期)2018-08-23 09:14:18
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
河北書畫研究(2016年2期)2016-08-24 02:14:50
新農業(2016年18期)2016-08-16 03:28:27
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
