網(wǎng)絡(luò)化彈藥起爆控制半實(shí)物仿真測(cè)試方法
2023-07-10 03:08:42劉金月龔鵬楊昊偉李慧博唐飛喜高翔
兵工學(xué)報(bào) 2023年6期
關(guān)鍵詞:系統(tǒng)
劉金月,龔鵬,楊昊偉,李慧博,唐飛喜,高翔
(北京理工大學(xué) 機(jī)電學(xué)院,北京 100081)
0 引言
隨著網(wǎng)絡(luò)通信技術(shù)的不斷發(fā)展,信息化已成為現(xiàn)代戰(zhàn)爭(zhēng)的主要特征之一[1-2]。網(wǎng)絡(luò)化彈藥是信息化作戰(zhàn)背景下提出的一種新型武器概念[3-4],其將多類型彈藥基于組網(wǎng)通訊組成整體作戰(zhàn)群[5],可通過(guò)多平臺(tái)、多方式投放至作戰(zhàn)區(qū)域,由指揮控制中心進(jìn)行任務(wù)規(guī)劃、協(xié)同控制,各作戰(zhàn)節(jié)點(diǎn)利用通信網(wǎng)絡(luò)實(shí)現(xiàn)信息資源共享,依據(jù)所長(zhǎng)分工協(xié)作,共同完成對(duì)目標(biāo)的智能探測(cè)、識(shí)別跟蹤、精準(zhǔn)打擊和高效毀傷[6]。網(wǎng)絡(luò)化彈藥通過(guò)各作戰(zhàn)節(jié)點(diǎn)間信息的高度共享、任務(wù)的有效整合和系統(tǒng)內(nèi)資源的優(yōu)化調(diào)度[5],顯著地增強(qiáng)了彈藥的戰(zhàn)場(chǎng)態(tài)勢(shì)感知能力、多種目標(biāo)自適應(yīng)打擊能力和持續(xù)區(qū)域控制能力,其作戰(zhàn)效費(fèi)比遠(yuǎn)高于傳統(tǒng)彈藥[7]。因此,對(duì)網(wǎng)絡(luò)化彈藥進(jìn)行相關(guān)研究具有重要戰(zhàn)略意義。
測(cè)試驗(yàn)證是武器裝備研發(fā)過(guò)程中的重要環(huán)節(jié)之一,該環(huán)節(jié)不僅要考核所研裝備的性能指標(biāo),還要從測(cè)量戰(zhàn)技性能參數(shù)準(zhǔn)確性、測(cè)試結(jié)果分析科學(xué)性、測(cè)試成本經(jīng)濟(jì)性等角度進(jìn)行多方面考量,避免實(shí)驗(yàn)與測(cè)試成為阻礙武器裝備發(fā)展和實(shí)戰(zhàn)應(yīng)用的瓶頸。網(wǎng)絡(luò)化彈藥相比于常規(guī)彈藥技術(shù)難度大、研制成本高,其對(duì)測(cè)試驗(yàn)證方法準(zhǔn)確性、可靠性以及經(jīng)濟(jì)性的要求也更高。因此,探索適用于網(wǎng)絡(luò)化彈藥的測(cè)試驗(yàn)證技術(shù),搭建可對(duì)其進(jìn)行高效、可信、經(jīng)濟(jì)測(cè)試的實(shí)驗(yàn)平臺(tái),成為網(wǎng)絡(luò)化彈藥相關(guān)研究面臨的一大機(jī)遇和挑戰(zhàn)。
武器裝備的測(cè)試方法通常分為實(shí)物驗(yàn)證、計(jì)算機(jī)仿真和半實(shí)物仿真法。文獻(xiàn)[8]針對(duì)智能彈藥的發(fā)展特點(diǎn)總結(jié)了其靶場(chǎng)實(shí)驗(yàn)測(cè)試的需求,分析了國(guó)內(nèi)外靶場(chǎng)測(cè)試的差距,指出了智能彈藥靶場(chǎng)測(cè)試在遠(yuǎn)程彈道測(cè)量能力、飛行姿態(tài)測(cè)量能力、靶場(chǎng)半實(shí)物仿真測(cè)試能力和終點(diǎn)子母彈彈道測(cè)量能力等方面存在的問(wèn)題,并提供了解決思路。但是網(wǎng)絡(luò)化彈藥規(guī)模大、節(jié)點(diǎn)多,采用靶場(chǎng)測(cè)試的實(shí)物驗(yàn)證法只能對(duì)少量節(jié)點(diǎn)進(jìn)行驗(yàn)證,不便于對(duì)其網(wǎng)絡(luò)化工作特性的研究。而搭建全尺度的實(shí)物實(shí)驗(yàn)平臺(tái),通常又要面臨成本過(guò)高、實(shí)驗(yàn)場(chǎng)地受限等問(wèn)題。文獻(xiàn)[3]強(qiáng)調(diào)小子樣實(shí)驗(yàn)技術(shù)將是未來(lái)網(wǎng)絡(luò)化巡飛攻擊彈藥鑒定實(shí)驗(yàn)的發(fā)展必然趨勢(shì),必須發(fā)展可代替靶場(chǎng)測(cè)試的低成本鑒定方法。除此之外,網(wǎng)絡(luò)化彈藥的設(shè)計(jì)開(kāi)發(fā)過(guò)程通常需要進(jìn)行大量的重復(fù)性實(shí)驗(yàn),而靶場(chǎng)測(cè)試法可重復(fù)性較差,無(wú)法滿足網(wǎng)絡(luò)化彈藥的重復(fù)測(cè)試需求。因此,實(shí)物測(cè)試法并不適用于網(wǎng)絡(luò)化彈藥的研究測(cè)試工作。相比之下,計(jì)算機(jī)仿真法通過(guò)軟件平臺(tái)搭建網(wǎng)絡(luò)仿真模型,配置仿真場(chǎng)景靈活,統(tǒng)計(jì)網(wǎng)絡(luò)性能便捷,更適用于網(wǎng)絡(luò)化彈藥的測(cè)試研究工作[9]。文獻(xiàn)[10]將現(xiàn)有仿真技術(shù)和工程實(shí)驗(yàn)相結(jié)合,對(duì)比分析了我國(guó)圖像制導(dǎo)、激光制導(dǎo)、毫米波制導(dǎo)和組合導(dǎo)航等不同制導(dǎo)體制網(wǎng)絡(luò)化彈藥在仿真技術(shù)、方法和設(shè)備等方面與國(guó)外先進(jìn)水平間的差距,為我國(guó)網(wǎng)絡(luò)化彈藥仿真技術(shù)的發(fā)展提供參考方向。但是,純數(shù)字/計(jì)算機(jī)仿真法無(wú)法對(duì)原理樣機(jī)進(jìn)行測(cè)試,樣機(jī)互用性、兼容性及可擴(kuò)展性的驗(yàn)證成為難點(diǎn)問(wèn)題,而且計(jì)算機(jī)仿真法在系統(tǒng)模型搭建過(guò)程中,通常會(huì)對(duì)實(shí)物設(shè)備進(jìn)行一定程度的簡(jiǎn)化,這也可能導(dǎo)致忽略了某些重要的系統(tǒng)特性而給實(shí)際應(yīng)用帶來(lái)問(wèn)題[11]。因此,相比于實(shí)物法和計(jì)算機(jī)仿真法,半實(shí)物仿真法更適用于網(wǎng)絡(luò)化彈藥的研究工作。半實(shí)物仿真法,即硬件在回路仿真(HILS)[12]將硬件與仿真相結(jié)合,不僅在經(jīng)濟(jì)性、可重復(fù)性、安全性等方面優(yōu)勢(shì)突出[13-14],而且解決了復(fù)雜系統(tǒng)建模的難題,保證了仿真的真實(shí)性和精確性,在軍事領(lǐng)域受到了高度重視[15-18]。文獻(xiàn)[19]基于半實(shí)物仿真技術(shù),搭建了空間攻防對(duì)抗仿真平臺(tái),但該平臺(tái)仿真場(chǎng)景僅能在仿真開(kāi)始前通過(guò)配置仿真文件進(jìn)行改變,未能實(shí)現(xiàn)仿真過(guò)程中的動(dòng)態(tài)控制。因此,半實(shí)物仿真法在網(wǎng)絡(luò)化彈藥的動(dòng)態(tài)測(cè)試研究工作中具有廣泛的應(yīng)用前景[20-21]。
為解決網(wǎng)絡(luò)化彈藥靶場(chǎng)實(shí)彈測(cè)試成本高、可重復(fù)性差等問(wèn)題,本文提出一種網(wǎng)絡(luò)化彈藥起爆控制半實(shí)物仿真測(cè)試系統(tǒng)架構(gòu)。基于QualNet仿真平臺(tái),結(jié)合網(wǎng)絡(luò)化彈藥起爆控制工作流程和數(shù)據(jù)傳輸鏈路,開(kāi)發(fā)了網(wǎng)絡(luò)化彈藥安全系統(tǒng)狀態(tài)運(yùn)行監(jiān)控軟件,并設(shè)計(jì)了可實(shí)現(xiàn)實(shí)物節(jié)點(diǎn)與仿真網(wǎng)絡(luò)數(shù)據(jù)交互的半實(shí)物數(shù)據(jù)交互接口(RVIP),以及安全系統(tǒng)狀態(tài)運(yùn)行監(jiān)控軟件和安全與起爆控制模塊間的通信協(xié)議。用戶通過(guò)操作監(jiān)控軟件,可實(shí)現(xiàn)對(duì)網(wǎng)絡(luò)化彈藥節(jié)點(diǎn)安全與解保狀態(tài)的雙向切換、多模戰(zhàn)斗部起爆控制及節(jié)點(diǎn)狀態(tài)信息獲取。該網(wǎng)絡(luò)化彈藥半實(shí)物仿真測(cè)試方法能夠在保證仿真精度的同時(shí),將實(shí)物設(shè)備和訓(xùn)練人員接入到仿真網(wǎng)絡(luò),有效降低網(wǎng)絡(luò)化彈藥測(cè)試成本,提高裝備研制效率,為大規(guī)模網(wǎng)絡(luò)化彈藥驗(yàn)證與測(cè)試技術(shù)的發(fā)展提供了借鑒思路。
1 網(wǎng)絡(luò)化彈藥半實(shí)物仿真測(cè)試系統(tǒng)架構(gòu)
半實(shí)物仿真系統(tǒng)包含軟件模塊和硬件模塊[22],仿真系統(tǒng)通過(guò)兩類模塊的交互協(xié)作共同實(shí)現(xiàn)預(yù)期仿真目標(biāo)。基于半實(shí)物仿真系統(tǒng)模塊類型,本文針對(duì)網(wǎng)絡(luò)化彈藥測(cè)試需求提出了圖1所示測(cè)試系統(tǒng)架構(gòu)。

圖1 網(wǎng)絡(luò)化彈藥半實(shí)物仿真測(cè)試系統(tǒng)架構(gòu)Fig.1 Hardware-in-the-loop simulation test system architecture for networked munitions
由圖1可見(jiàn),該測(cè)試系統(tǒng)分為4個(gè)模塊:仿真模塊、安全系統(tǒng)狀態(tài)運(yùn)行監(jiān)控模塊、安全與起爆控制模塊及通訊模塊,其中仿真模塊和安全系統(tǒng)狀態(tài)運(yùn)行監(jiān)控模塊屬軟件模塊,安全與起爆控制模塊和通訊模塊屬硬件模塊。上述模塊組成的測(cè)試系統(tǒng)可實(shí)時(shí)控制、顯示網(wǎng)絡(luò)化彈藥群中選定節(jié)點(diǎn)的狀態(tài),為網(wǎng)絡(luò)化彈藥功能與性能測(cè)試提供可靠依據(jù)。
網(wǎng)絡(luò)化彈藥測(cè)試系統(tǒng)中各模塊的功能介紹如下:
1) 仿真模塊,該模塊基于QualNet仿真平臺(tái)完成網(wǎng)絡(luò)化彈藥組網(wǎng)模型搭建及場(chǎng)景配置。仿真模塊支持節(jié)點(diǎn)多種網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)部署及航跡規(guī)劃;支持信號(hào)傳播衰減模型、信噪干擾模型、無(wú)線信號(hào)傳播模型及氣候、地形等環(huán)境條件的設(shè)置;支持彈藥自組網(wǎng)絡(luò)網(wǎng)絡(luò)協(xié)議配置,并針對(duì)傳輸層、網(wǎng)絡(luò)層等各層提供了多種典型協(xié)議,同時(shí)支持用戶根據(jù)實(shí)際需求進(jìn)行網(wǎng)絡(luò)協(xié)議自定義。除此之外,本文在仿真模塊內(nèi)設(shè)計(jì)并實(shí)現(xiàn)了半實(shí)物仿真數(shù)據(jù)交互接口,用以實(shí)現(xiàn)實(shí)物設(shè)備與仿真模塊內(nèi)仿真網(wǎng)絡(luò)間的信息交互。仿真運(yùn)行過(guò)程中,仿真模塊可接收來(lái)自安全系統(tǒng)狀態(tài)運(yùn)行監(jiān)控模塊的指令,將其轉(zhuǎn)發(fā)給彈藥節(jié)點(diǎn),還可將各節(jié)點(diǎn)回傳的狀態(tài)信息發(fā)送給安全系統(tǒng)狀態(tài)運(yùn)行監(jiān)控模塊,實(shí)現(xiàn)信息資源共享。
2) 安全系統(tǒng)狀態(tài)運(yùn)行監(jiān)控模塊,該模塊可分為動(dòng)態(tài)控制和實(shí)時(shí)監(jiān)測(cè)兩個(gè)子模塊,其中動(dòng)態(tài)控制子模塊為人在回路提供接口,實(shí)時(shí)監(jiān)測(cè)子模塊則可實(shí)現(xiàn)戰(zhàn)場(chǎng)節(jié)點(diǎn)回傳信息的展示。動(dòng)態(tài)控制子模塊將作戰(zhàn)人員對(duì)彈藥節(jié)點(diǎn)的控制指令按協(xié)議規(guī)則打包并通過(guò)網(wǎng)口發(fā)送至QualNet仿真平臺(tái),經(jīng)仿真網(wǎng)絡(luò)轉(zhuǎn)發(fā)后,送達(dá)至對(duì)應(yīng)的安全與起爆控制模塊,實(shí)現(xiàn)對(duì)彈藥節(jié)點(diǎn)的動(dòng)態(tài)控制。控制類型包括三級(jí)保險(xiǎn)的解除與恢復(fù)、自毀、自失能、自失效及針對(duì)輕裝甲、重裝甲和集群軟目標(biāo)3種目標(biāo)類型的毀傷。實(shí)時(shí)監(jiān)測(cè)子模塊可動(dòng)態(tài)獲取指定彈藥節(jié)點(diǎn)的狀態(tài)信息,包括設(shè)備狀態(tài)、自檢狀態(tài)、三級(jí)保險(xiǎn)狀態(tài)、三通道的儲(chǔ)能電壓、高壓建立完成情況和升壓報(bào)錯(cuò)信息。安全系統(tǒng)狀態(tài)運(yùn)行監(jiān)控模塊通過(guò)人機(jī)交互不僅實(shí)現(xiàn)了對(duì)網(wǎng)絡(luò)化彈藥節(jié)點(diǎn)的實(shí)時(shí)控制,且滿足了作戰(zhàn)人員的培訓(xùn)演練需求;通過(guò)對(duì)彈藥節(jié)點(diǎn)狀態(tài)信息的顯示,為了解戰(zhàn)場(chǎng)狀況,做出進(jìn)一步的決策部署提供了參考信息。
3) 安全與起爆控制模塊,該模塊具有簡(jiǎn)化的安全邏輯控制電路、多個(gè)獨(dú)立的高壓能量聚集單元及發(fā)火子模塊。安全與起爆控制模塊通過(guò)開(kāi)關(guān)量控制,模擬電子安全系統(tǒng)一級(jí)、二級(jí)保險(xiǎn)的解除條件;其他控制指令則由安全系統(tǒng)狀態(tài)運(yùn)行監(jiān)控模塊下達(dá),安全與起爆控制模塊接收到后可對(duì)其進(jìn)行解析,實(shí)現(xiàn)電子安全系統(tǒng)的遠(yuǎn)距離保險(xiǎn)解除、安全狀態(tài)恢復(fù)及多通道多模式起爆功能;該模塊還可回傳自身狀態(tài)信息,保證指揮中心戰(zhàn)時(shí)對(duì)全局態(tài)勢(shì)信息的掌控。安全與起爆控制模塊作為實(shí)物模塊接入測(cè)試系統(tǒng),避免了復(fù)雜模型的構(gòu)造,且滿足了原理樣機(jī)功能及性能的測(cè)試驗(yàn)證需求。
4) 通訊模塊,該模塊基于電臺(tái)實(shí)現(xiàn)了各模塊間的無(wú)線通訊。通訊模塊具備多種接口,可實(shí)現(xiàn)3種數(shù)據(jù)類型轉(zhuǎn)換:射頻(RF)轉(zhuǎn)422串口模式、網(wǎng)口轉(zhuǎn)422串口模式及網(wǎng)口轉(zhuǎn)RF模式;同時(shí),擁有10種加解密模式,處于同一加密模式下的電臺(tái)才可進(jìn)行數(shù)據(jù)通訊。通訊模塊通過(guò)不同的數(shù)據(jù)轉(zhuǎn)換模式實(shí)現(xiàn)了測(cè)試系統(tǒng)間各模塊的無(wú)障礙交互,模擬了網(wǎng)絡(luò)化彈藥實(shí)際應(yīng)用中的無(wú)線通訊場(chǎng)景,同時(shí)通過(guò)加解密模式為數(shù)據(jù)提供了安全的網(wǎng)絡(luò)傳輸環(huán)境。
2 半實(shí)物交互接口設(shè)計(jì)
2.1 接口結(jié)構(gòu)設(shè)計(jì)
本文設(shè)計(jì)了一種低復(fù)雜度的RVIP作為連接真實(shí)網(wǎng)絡(luò)和仿真網(wǎng)絡(luò)的紐帶。RVIP結(jié)構(gòu)示意圖如圖2所示,節(jié)點(diǎn)A為實(shí)物節(jié)點(diǎn),節(jié)點(diǎn)A′為實(shí)物節(jié)點(diǎn)A在仿真網(wǎng)絡(luò)中的映射,又稱影子節(jié)點(diǎn)。實(shí)物節(jié)點(diǎn)A與影子節(jié)點(diǎn)A′形成一對(duì)映射關(guān)系,A的有線網(wǎng)卡eth0與A′的無(wú)線網(wǎng)卡wlan0則形成一對(duì)RVIP。本文將eth0命名為RVIP-Real,將wlan0命名為RVIP-Virtual,二者的IP地址、MAC地址相同。仿真服務(wù)器的實(shí)物網(wǎng)卡eth1為真實(shí)網(wǎng)絡(luò)和QualNet仿真平臺(tái)的連接橋梁(eth1也可由交換機(jī)代替),將其稱之為RVIP的橋接端口(RVIP-Bridge)。基于上述接口結(jié)構(gòu),當(dāng)RVIP-Real發(fā)送真實(shí)數(shù)據(jù)包時(shí),RVIP-Virtual也會(huì)發(fā)送相同含義的虛擬數(shù)據(jù)包;反之,當(dāng)RVIP-Virtual接收到仿真網(wǎng)絡(luò)中其他節(jié)點(diǎn)發(fā)送的虛擬數(shù)據(jù)包時(shí),RVIP-Real也會(huì)接收到相同含義的真實(shí)數(shù)據(jù)包。通過(guò)RVIP,真實(shí)網(wǎng)卡和虛擬網(wǎng)卡實(shí)現(xiàn)了網(wǎng)絡(luò)行為上的一致性。

圖2 RVIP接口示意圖Fig.2 Schematic diagram of RVIP interface
2.2 接口工作流程
真實(shí)網(wǎng)絡(luò)和仿真網(wǎng)絡(luò)數(shù)據(jù)交互主要依賴于以下3個(gè)模塊:數(shù)據(jù)包抓取、數(shù)據(jù)包轉(zhuǎn)換和數(shù)據(jù)包構(gòu)建。當(dāng)實(shí)物設(shè)備RVIP-Real發(fā)出真實(shí)數(shù)據(jù)包時(shí),RVIP通過(guò)數(shù)據(jù)包抓取模塊該數(shù)據(jù)包進(jìn)行實(shí)時(shí)抓取;之后,將抓取到的真實(shí)數(shù)據(jù)包通過(guò)數(shù)據(jù)包轉(zhuǎn)換模塊轉(zhuǎn)換為仿真網(wǎng)絡(luò)可識(shí)別和處理的虛擬數(shù)據(jù)包并發(fā)送到仿真網(wǎng)絡(luò)中;此后,該數(shù)據(jù)包的生命周期交由QualNet仿真平臺(tái)管理。類似,當(dāng)RVIP-Virtual收到其他虛擬節(jié)點(diǎn)發(fā)來(lái)的虛擬數(shù)據(jù)包時(shí),在鏈路層不再將其交給上層協(xié)議,而是通過(guò)數(shù)據(jù)包構(gòu)建模塊將其構(gòu)建成真實(shí)數(shù)據(jù)包,發(fā)給對(duì)應(yīng)的RVIP-Real。RVIP的詳細(xì)工作流程如下。
2.2.1 初始配置
首先,將實(shí)物節(jié)點(diǎn)與仿真服務(wù)器通過(guò)路由器相連,并將仿真服務(wù)器的路由轉(zhuǎn)發(fā)功能和路由重定向功能關(guān)閉,防止安全與起爆控制模塊和安全系統(tǒng)狀態(tài)運(yùn)行監(jiān)控軟件間的交互數(shù)據(jù)未進(jìn)入仿真網(wǎng)絡(luò)便直接被仿真服務(wù)器轉(zhuǎn)發(fā)。除此之外,還要對(duì)實(shí)物節(jié)點(diǎn)的路由表進(jìn)行配置,使實(shí)物節(jié)點(diǎn)間的通信必須經(jīng)過(guò)仿真服務(wù)器的轉(zhuǎn)發(fā)才能進(jìn)行。然后,在QualNet仿真平臺(tái)中搭建仿真場(chǎng)景,并在其配置文件中加入配置信息,配置信息格式如下:
REAL YES
[NODE ID] REAL-INTERFACE[INTERFACE ID] eth1
[NODE ID] REAL-LEVEL[INTERFACE ID] 1
其中:REAL YES表示該場(chǎng)景配有RVIP;NODE ID則代表節(jié)點(diǎn)號(hào),INTERFACE ID代表節(jié)點(diǎn)的端口號(hào),該部分配置信息聲明了該節(jié)點(diǎn)該端口為RVIP-Virtual;eth1則指明了仿真網(wǎng)絡(luò)同真實(shí)網(wǎng)絡(luò)的連接端口(仿真服務(wù)器網(wǎng)卡);REAL-LEVEL代表接口的工作模式,1代表隧道模式,2代表解析模式。隧道模式下,真實(shí)數(shù)據(jù)包對(duì)仿真網(wǎng)絡(luò)不透明,虛擬節(jié)點(diǎn)不能對(duì)該數(shù)據(jù)包中的各字段進(jìn)行解析和識(shí)別,而解析模式則支持仿真網(wǎng)絡(luò)對(duì)數(shù)據(jù)包進(jìn)行解析,真正實(shí)現(xiàn)了實(shí)物節(jié)點(diǎn)和虛擬節(jié)點(diǎn)在協(xié)議層上的交互。最后運(yùn)行仿真場(chǎng)景,QualNet仿真平臺(tái)讀取配置信息,進(jìn)行初始化工作。初始化結(jié)束后,每對(duì)RVIP都具有 1個(gè) libnet句柄、1個(gè)libpcap句柄和1個(gè)libpcap緩存,其中l(wèi)ibnet句柄屬于數(shù)據(jù)包構(gòu)建模塊,負(fù)責(zé)真實(shí)數(shù)據(jù)包的構(gòu)建與發(fā)送;libpcap句柄屬于數(shù)據(jù)抓取模塊,負(fù)責(zé)實(shí)現(xiàn)對(duì)libpcap緩存中數(shù)據(jù)包的讀取和過(guò)濾。
2.2.2 數(shù)據(jù)包注入仿真網(wǎng)絡(luò)
數(shù)據(jù)包抓取模塊工作示意圖如圖3所示。仿真開(kāi)始后,QualNet仿真平臺(tái)處于實(shí)時(shí)工作狀態(tài),以保證仿真網(wǎng)絡(luò)和仿真服務(wù)器真實(shí)網(wǎng)卡(eth1)的時(shí)間同步。實(shí)物節(jié)點(diǎn)真實(shí)網(wǎng)卡eth0(RVIP-Real)發(fā)出的數(shù)據(jù)包,經(jīng)eth1和libpcap過(guò)濾器過(guò)濾后,被存放在該對(duì)RVIP對(duì)應(yīng)的libpcap緩存中。QualNet仿真平臺(tái)開(kāi)啟一個(gè)超時(shí)周期為T(mén)(默認(rèn)設(shè)置為1 ms)的定時(shí)器,每過(guò)一個(gè)周期T,QualNet仿真平臺(tái)遍歷一次存放所有RVIP對(duì)的鏈表,依次調(diào)用每對(duì)RVIP的 libpacp句柄,讀出libpcap緩存中的全部數(shù)據(jù)包。數(shù)據(jù)包被讀取后,將被構(gòu)建成虛擬數(shù)據(jù)包,之后該虛擬數(shù)據(jù)包被插入到對(duì)應(yīng)RVIP-Virtual的MAC層發(fā)送緩存中,最后在仿真網(wǎng)絡(luò)中到達(dá)目的節(jié)點(diǎn)。

圖3 數(shù)據(jù)包注入仿真網(wǎng)絡(luò)Fig.3 Date packet injection into the simulation network
2.2.3 數(shù)據(jù)包導(dǎo)出仿真網(wǎng)絡(luò)
在仿真網(wǎng)絡(luò)中,當(dāng)RVIP-Virtual接收到虛擬數(shù)據(jù)包時(shí),在鏈路層對(duì)其進(jìn)行攔截,不再將其上交給該節(jié)點(diǎn)的上層協(xié)議,而是調(diào)用相應(yīng)的libnet句柄,依據(jù)該虛擬數(shù)據(jù)包構(gòu)建真實(shí)數(shù)據(jù)包,并將構(gòu)建的真實(shí)數(shù)據(jù)包通過(guò)RVIP-Bridge發(fā)給RVIP-Real。接收到該真實(shí)數(shù)據(jù)包的實(shí)物節(jié)點(diǎn)可以對(duì)其進(jìn)行識(shí)別和處理。
2.3 核心數(shù)據(jù)結(jié)構(gòu)
仿真開(kāi)始后,QualNet仿真平臺(tái)將根據(jù)配置文件生成一個(gè)RealData型變量,用于記錄RVIP的配置情況和接口時(shí)延統(tǒng)計(jì)信息,RealData結(jié)構(gòu)體具體如下:
struct RealData
{
int rvipNumber;
rvipType rvipData[MAX_RVIP]
clocktype avgReceiveDelayInterval;
clocktype maxReceiveDelayInterval;
clocktype lastReceiveTime;
}
其中:rvipNumber用于記錄此次仿真中配置的RVIP對(duì)數(shù)量;rvipData[ ]數(shù)組用于記錄每對(duì)RVIP的詳細(xì)情況;avgReceiveDelayInterval則代表所有RVIP對(duì)的平均接入時(shí)延;maxReceiveDelayInterval代表最大接入時(shí)延;lastReceiveTime則為最近一次數(shù)據(jù)接收時(shí)間。通過(guò)上述3個(gè)clocktype型變量,可以便捷地對(duì)半實(shí)物接口時(shí)延性能進(jìn)行統(tǒng)計(jì)和評(píng)估。
上述用于記錄RVIP對(duì)的數(shù)組rvipData[ ],其數(shù)據(jù)類型為自定義的rvipType結(jié)構(gòu)。在QualNet仿真平臺(tái)中,每對(duì)RVIP都有一個(gè)rvipType型的變量與之對(duì)應(yīng),其結(jié)構(gòu)體具體定義如下:
typedef struct rvipType
{
NodeId nodeId;
int interfaceId;
charifName[DEVICE_STRING_LENGTH];
char ipAddr[IPORMAC_ADDRESS_LENGTH];
char macAddr[IPORMAC_ADDRESS_LENGTH];
Pcap_t *handle;
int level;
}
其中:nodeId為該RVIP對(duì)影子節(jié)點(diǎn)的節(jié)點(diǎn)號(hào);interfaceId為RVIP-Virtual在影子節(jié)點(diǎn)上的端口號(hào);ifName表示RVIP-Bridge的名字;ipAddr為該RVIP的IP地址;macAddr為該RVIP的MAC地址(注:RVIP-Real和RVIP-Virtual的IP地址和MAC地址應(yīng)相同);handle中存放了該RVIP的libpcap句柄;level表示接口的工作模式。
3 安全系統(tǒng)狀態(tài)運(yùn)行監(jiān)控軟件設(shè)計(jì)
本文基于Qt平臺(tái)設(shè)計(jì)并實(shí)現(xiàn)了網(wǎng)絡(luò)化彈藥安全系統(tǒng)狀態(tài)運(yùn)行監(jiān)控軟件,該軟件分為動(dòng)態(tài)控制、實(shí)時(shí)監(jiān)測(cè)和狀態(tài)信息打印3個(gè)模塊,可依托上述半實(shí)物交互接口實(shí)現(xiàn)與仿真模塊的信息交互。
3.1 軟件界面設(shè)計(jì)
3.1.1 動(dòng)態(tài)控制模塊
動(dòng)態(tài)控制模塊可對(duì)網(wǎng)絡(luò)中的彈藥節(jié)點(diǎn)進(jìn)行實(shí)時(shí)動(dòng)態(tài)干預(yù),其界面效果圖如圖4所示。輸入所選彈藥節(jié)點(diǎn)的IP地址、端口號(hào)和搭載電臺(tái)號(hào)后,點(diǎn)擊開(kāi)始按鈕啟動(dòng)軟件。選擇A、B、C三通道,點(diǎn)擊“解除3級(jí)保險(xiǎn)”按鈕可對(duì)該彈藥節(jié)點(diǎn)進(jìn)行遠(yuǎn)程解保;若點(diǎn)擊“恢復(fù)3級(jí)保險(xiǎn)”則對(duì)該節(jié)點(diǎn)進(jìn)行自失能。解保后,選擇A通道,點(diǎn)擊遠(yuǎn)程起爆,可實(shí)現(xiàn)對(duì)重裝甲目標(biāo)的毀傷;類似,選擇B通道實(shí)現(xiàn)輕裝甲目標(biāo)毀傷,選擇C通道實(shí)現(xiàn)集群軟目標(biāo)毀傷;同時(shí)選擇A、B、C三通道,點(diǎn)擊“遠(yuǎn)程起爆”則可實(shí)現(xiàn)自毀功能。除此之外,為了便于實(shí)驗(yàn)室進(jìn)行實(shí)驗(yàn),軟件還設(shè)置了“恢復(fù)遠(yuǎn)程起爆”按鈕,可將安全與起爆控制模塊恢復(fù)到起爆前狀態(tài),以進(jìn)行多次測(cè)試。勾選“測(cè)試幀”選框,此后發(fā)送的每組命令幀中,會(huì)存在一幀隨機(jī)錯(cuò)誤,可用于對(duì)安全與起爆控制模塊的容錯(cuò)率測(cè)試。在發(fā)送上述指令時(shí),會(huì)在“連續(xù)發(fā)送”處顯示已連續(xù)發(fā)送該指令的幀計(jì)數(shù),便于排查是否因漏發(fā)指令幀造成安全與起爆控制模塊響應(yīng)異常。

圖4 動(dòng)態(tài)控制模塊界面效果圖Fig.4 Interface rendering of dynamic control module
3.1.2 實(shí)時(shí)監(jiān)測(cè)模塊
實(shí)時(shí)監(jiān)測(cè)模塊的主要功能是展示網(wǎng)絡(luò)中選定彈藥節(jié)點(diǎn)的實(shí)時(shí)狀態(tài),其界面效果圖如圖5所示。當(dāng)動(dòng)態(tài)控制模塊選定彈藥節(jié)點(diǎn)開(kāi)啟軟件后,實(shí)時(shí)監(jiān)測(cè)模塊將不斷查詢更新節(jié)點(diǎn)信息,信息包括:該節(jié)點(diǎn)回傳的數(shù)據(jù)幀計(jì)數(shù)、設(shè)備狀態(tài)、自檢狀態(tài)、三級(jí)保險(xiǎn)解除情況、三通道的實(shí)時(shí)儲(chǔ)能電壓、高壓建立情況及升壓報(bào)錯(cuò)情況。
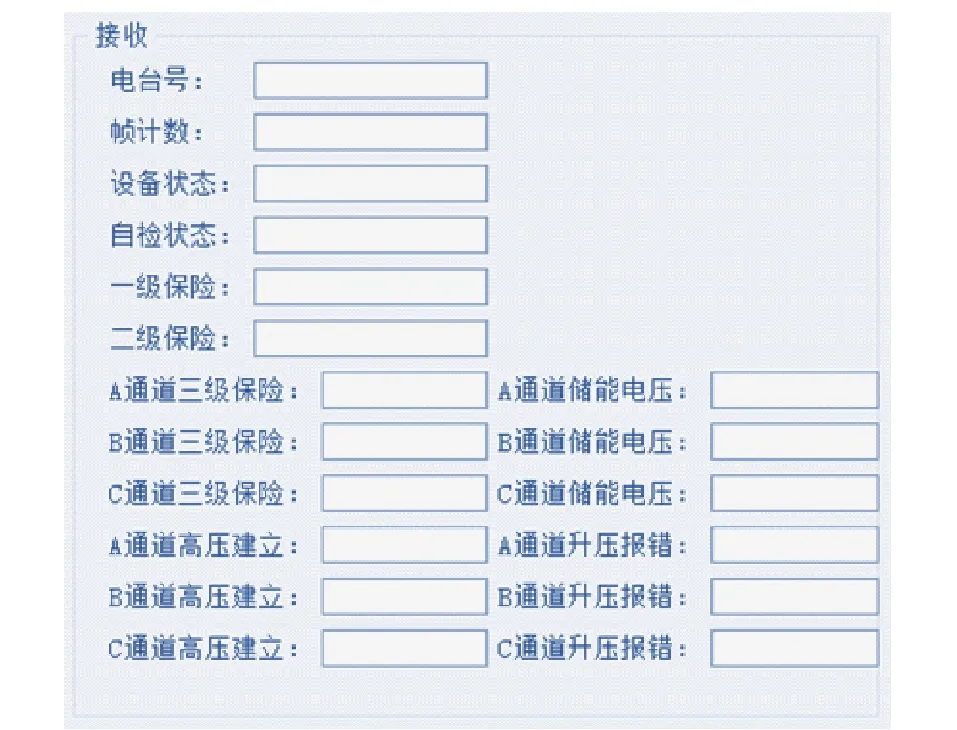
圖5 實(shí)時(shí)監(jiān)測(cè)模塊界面效果圖Fig.5 Interface rendering of real-time monitoring module
3.1.3 狀態(tài)信息打印模塊
狀態(tài)信息打印模塊負(fù)責(zé)打印工作過(guò)程中的提示信息,以為用戶提供參考依據(jù),便于實(shí)驗(yàn)測(cè)試和實(shí)際使用,如提示用戶按照規(guī)則選擇彈藥節(jié)點(diǎn)、打印指令發(fā)送成功反饋信息、進(jìn)行容錯(cuò)率測(cè)試時(shí),該模塊還會(huì)打印所發(fā)送的指令幀,以便觀察錯(cuò)誤幀的錯(cuò)誤情況。狀態(tài)信息打印模塊界面效果圖如圖6所示。

圖6 狀態(tài)信息打印模塊界面效果圖Fig.6 Interface rendering of status information printing module
3.2 交互報(bào)文設(shè)計(jì)
3.2.1 控制報(bào)文
控制報(bào)文由網(wǎng)絡(luò)化彈藥安全系統(tǒng)狀態(tài)運(yùn)行監(jiān)控軟件的動(dòng)態(tài)控制模塊發(fā)送,由安全與起爆控制模塊接收,安全與起爆控制模塊每收到一個(gè)控制報(bào)文,便回復(fù)一個(gè)包含該節(jié)點(diǎn)狀態(tài)信息的應(yīng)答報(bào)文。控制報(bào)文的報(bào)文格式及含義定義(見(jiàn)表1)為:

表1 控制報(bào)文格式及含義Table 1 Control message format and meaning
1)控制報(bào)文長(zhǎng)度設(shè)置為10 B,幀頭為EB90;和校驗(yàn)碼計(jì)算第1~8 B(包括幀頭)共計(jì)8 B。
2)CNT:幀計(jì)數(shù),當(dāng)發(fā)送的控制指令被正確接收時(shí),幀計(jì)數(shù)連續(xù)遞增,00~FF循環(huán)計(jì)數(shù)。
3)指令碼及其含義:
①00,查詢,動(dòng)態(tài)控制模塊無(wú)控制指令需要發(fā)送時(shí),每隔一定周期自動(dòng)向安全與起爆控制模塊發(fā)送查詢指令,安全與起爆控制模塊回復(fù)自身狀態(tài)信息。
②D1,解除3級(jí)保險(xiǎn),發(fā)送10幀且?guī)?jì)數(shù)連續(xù)有效。
③D2,恢復(fù)3級(jí)保險(xiǎn),發(fā)送3幀且?guī)?jì)數(shù)連續(xù)有效。
④5C,遠(yuǎn)程起爆,發(fā)送10幀且?guī)?jì)數(shù)連續(xù)有效。
⑤6D,恢復(fù)遠(yuǎn)程起爆,發(fā)送3幀且?guī)?jì)數(shù)連續(xù)有效。
4)電臺(tái)號(hào):受控節(jié)點(diǎn)所搭載的電臺(tái)編號(hào)。
5)通道號(hào):只在解除3級(jí)保險(xiǎn)及遠(yuǎn)程起爆指令中起作用,“00000111”低三位分別對(duì)應(yīng)ABC通道;查詢、恢復(fù)3級(jí)保險(xiǎn)和恢復(fù)遠(yuǎn)程起爆指令中設(shè)置為“00000000”。
3.2.2 回復(fù)報(bào)文
回復(fù)報(bào)文由安全與起爆控制模塊發(fā)送,由安全系統(tǒng)狀態(tài)運(yùn)行監(jiān)控軟件的實(shí)時(shí)監(jiān)測(cè)模塊接收。報(bào)文格式及含義定義(見(jiàn)表2)為:

表2 回復(fù)報(bào)文格式及含義Table 2 Reply message format and meaning
1)回復(fù)報(bào)文長(zhǎng)度為16 B,幀頭為AA55,和校驗(yàn)碼計(jì)算從第1~第14 B(包括幀頭)共計(jì)14 B。
2)CNT:幀計(jì)數(shù),00~FF循環(huán)計(jì)數(shù)。
3)A、B、C通道儲(chǔ)能電壓:通過(guò)比例換算即可獲得。
4)狀態(tài)字0、1、2的格式及含義分別如表3、表4、表5所示。
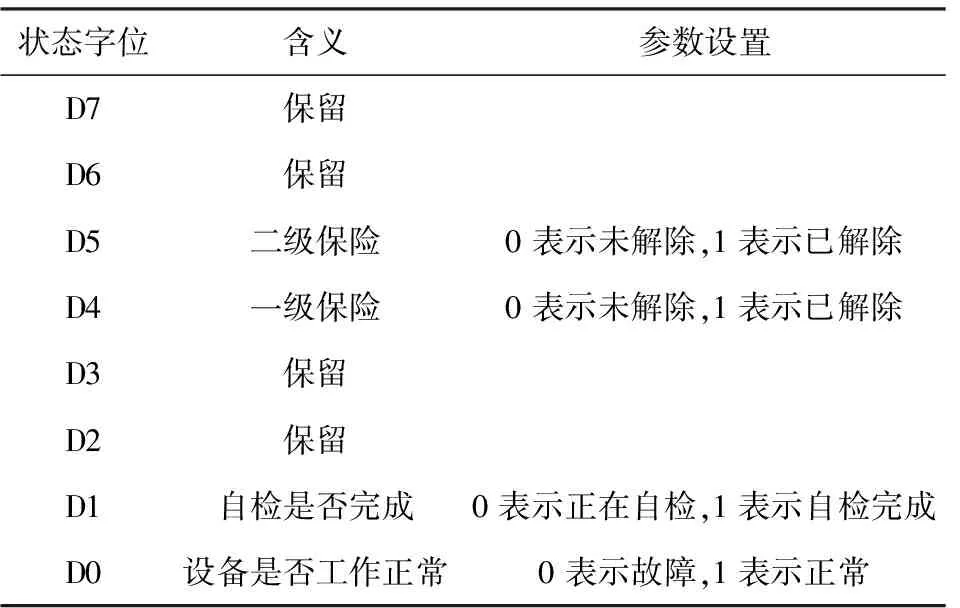
表3 狀態(tài)字0格式及含義Table 3 Status word 0 format and meaning

表4 狀態(tài)字1格式及含義Table 4 Status word 1 format and meaning
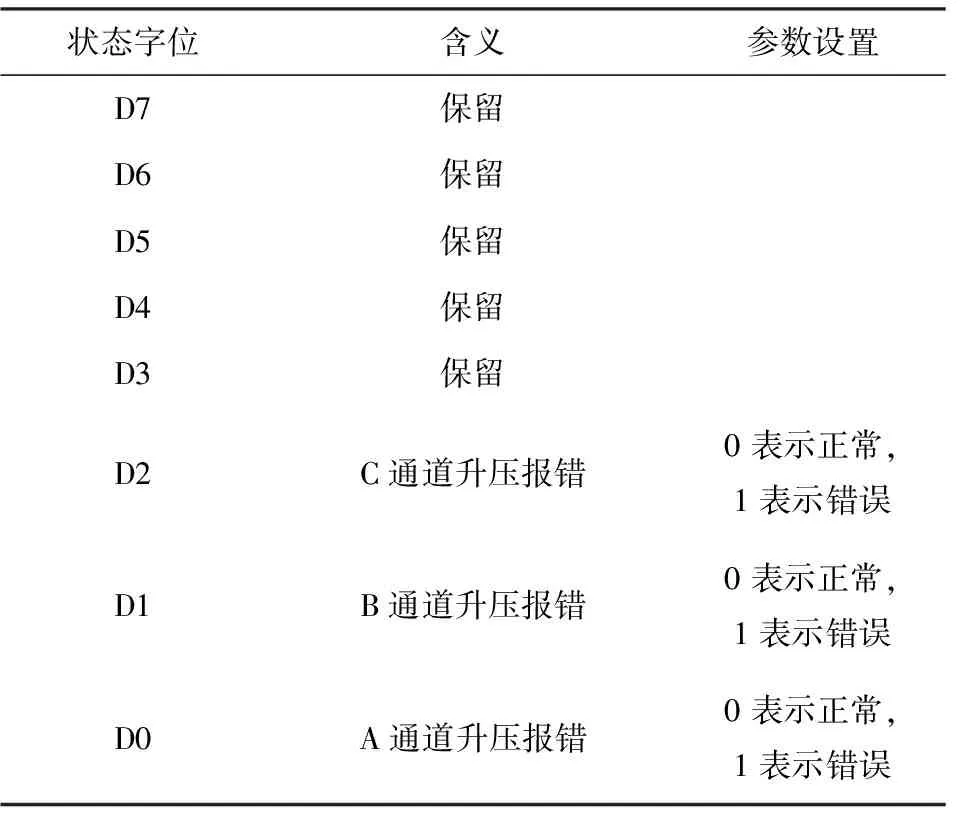
表5 狀態(tài)字2格式及含義Table 5 Status word 2 format and meaning
4 實(shí)驗(yàn)與測(cè)試
4.1 測(cè)試場(chǎng)景配置
網(wǎng)絡(luò)化彈藥半實(shí)物仿真測(cè)試系統(tǒng)架構(gòu)如圖7所示,實(shí)物圖如圖8所示。測(cè)試系統(tǒng)主要設(shè)備包括2臺(tái)計(jì)算機(jī)、2部無(wú)線通訊電臺(tái)、2個(gè)安全控制與起爆模塊及6個(gè)起爆點(diǎn)模塊。其中,2臺(tái)計(jì)算機(jī)與2部電臺(tái)皆連接在同一臺(tái)路由器上:計(jì)算機(jī)1作為仿真服務(wù)器,運(yùn)行QualNet仿真模塊;計(jì)算機(jī)2模擬指揮控制中心,安裝安全系統(tǒng)狀態(tài)運(yùn)行監(jiān)控軟件;通訊電臺(tái)負(fù)責(zé)實(shí)現(xiàn)指揮控制中心和安全與起爆控制模塊的信息交互。每臺(tái)安全與起爆控制機(jī)構(gòu)負(fù)載3個(gè)起爆點(diǎn)模塊,示波器通過(guò)高壓探頭實(shí)時(shí)檢測(cè)起爆點(diǎn)電壓。

圖7 測(cè)試系統(tǒng)設(shè)備連接示意圖Fig.7 Schematic diagram of equipment connection of the test system

圖8 測(cè)試系統(tǒng)設(shè)備實(shí)物圖Fig.8 Photo of test system equipment
仿真服務(wù)器上基于QualNet仿真平臺(tái)設(shè)計(jì)搭建的仿真場(chǎng)景如圖9所示。網(wǎng)絡(luò)化彈藥仿真場(chǎng)景節(jié)點(diǎn)說(shuō)明如下:1號(hào)節(jié)點(diǎn)與計(jì)算機(jī)1互為一對(duì)RVIP;2、3號(hào)節(jié)點(diǎn)為影子彈藥節(jié)點(diǎn),分別與1、2號(hào)安全與起爆控制模塊互為一對(duì)RVIP;4~18號(hào)節(jié)點(diǎn)為虛擬彈藥節(jié)點(diǎn)。
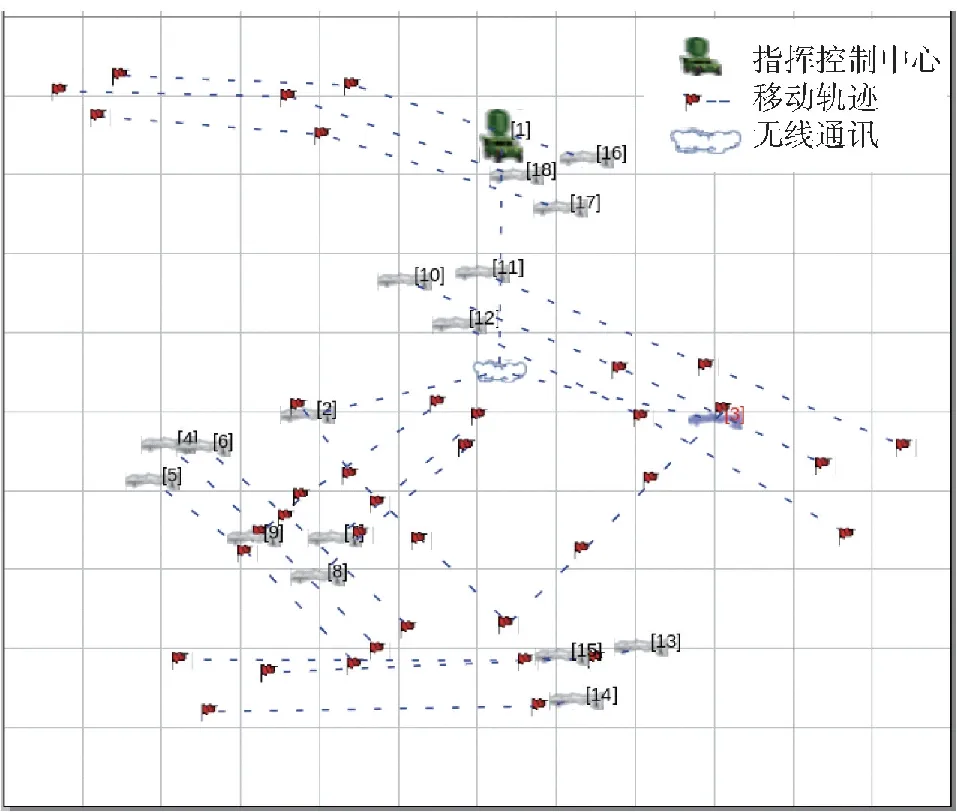
圖9 基于QualNet仿真平臺(tái)的網(wǎng)絡(luò)化彈藥仿真場(chǎng)景Fig.9 Networked munitions simulation scene based on QualNet
設(shè)備連接完成后,修改兩臺(tái)計(jì)算機(jī)的路由信息,使得指揮控制中心與無(wú)線電臺(tái)的通訊不能直接進(jìn)行,而是必須經(jīng)由仿真服務(wù)器的仿真網(wǎng)絡(luò)路由轉(zhuǎn)發(fā);設(shè)置無(wú)線電臺(tái)處于同一加密模式下,保證通信正常且安全;在場(chǎng)景配置文件中進(jìn)行RVIP配置,具體方法如2.2節(jié)所述。
4.2 功能測(cè)試
運(yùn)行4.1節(jié)的網(wǎng)絡(luò)化彈藥仿真場(chǎng)景,在網(wǎng)絡(luò)化彈藥安全系統(tǒng)狀態(tài)運(yùn)行監(jiān)控軟件中輸入2號(hào)安全與起爆控制模塊所搭載的電臺(tái)IP地址、端口號(hào)及電臺(tái)號(hào),點(diǎn)擊開(kāi)始按鈕啟動(dòng)軟件。選擇A、B、C三通道,發(fā)送解除3級(jí)保險(xiǎn)指令。觀測(cè)到QualNet仿真場(chǎng)景中數(shù)據(jù)流向如圖10所示,數(shù)據(jù)包從1號(hào)指揮控制中心流向3號(hào)彈藥影子節(jié)點(diǎn),即2號(hào)安全與起爆控制模塊在場(chǎng)景中的映射節(jié)點(diǎn)。
通過(guò)網(wǎng)絡(luò)化彈藥安全系統(tǒng)狀態(tài)運(yùn)行監(jiān)控軟件監(jiān)測(cè)到的受控節(jié)點(diǎn)信息如圖11所示,狀態(tài)信息打印模塊提示“解除3級(jí)保險(xiǎn)指令發(fā)送成功”,節(jié)點(diǎn)三級(jí)保險(xiǎn)狀態(tài)由“未解除”變?yōu)椤耙呀獬?三通道電壓由0 V快速上升至1 200 V±100 V范圍內(nèi),三通道高壓建立已完成,未出現(xiàn)異常。

圖11 解除3級(jí)保險(xiǎn)實(shí)驗(yàn)結(jié)果圖Fig.11 Result of grade 3 arming experiment
同時(shí)通過(guò)示波器高壓探頭探測(cè)到,2號(hào)安全與起爆控制模塊負(fù)載的某起爆點(diǎn)電壓如圖12所示,該處電壓在141 ms時(shí)間內(nèi)迅速上升并最終穩(wěn)定在1 120 V左右,與網(wǎng)絡(luò)化彈藥系統(tǒng)監(jiān)控軟件所得結(jié)論一致。

圖12 解除3級(jí)保險(xiǎn)實(shí)驗(yàn)示波器響應(yīng)曲線圖Fig.12 Response curve of oscilloscope for grade 3 arming experiment
繼續(xù)選擇A、B、C三通道,發(fā)送遠(yuǎn)程起爆指令。通過(guò)安全系統(tǒng)狀態(tài)運(yùn)行監(jiān)控軟件觀測(cè)到實(shí)驗(yàn)結(jié)果如圖13所示,狀態(tài)信息打印模塊提示“遠(yuǎn)程起爆指令發(fā)送成功”,三通道電壓下降為0 V,三通道高壓建立狀態(tài)為“未完成”。
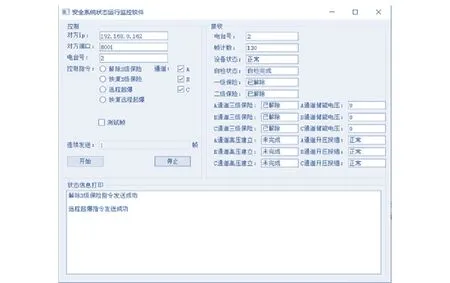
圖13 遠(yuǎn)程起爆實(shí)驗(yàn)結(jié)果Fig.13 Result of remote detonation experiment
同時(shí)通過(guò)示波器觀測(cè)到某起爆點(diǎn)電壓如圖14所示,該通道電壓瞬間下降為0 V,與網(wǎng)絡(luò)化彈藥系統(tǒng)監(jiān)控軟件所得結(jié)論一致。

圖14 遠(yuǎn)程起爆實(shí)驗(yàn)示波器響應(yīng)曲線Fig.14 Response curve of oscilloscope for remote initiation experiment
實(shí)驗(yàn)結(jié)果表明,安全系統(tǒng)狀態(tài)運(yùn)行監(jiān)控軟件下達(dá)的控制指令,可由仿真模塊正確轉(zhuǎn)發(fā)至安全與起爆控制模塊,安全與起爆控制模塊接收后可正常響應(yīng),且其狀態(tài)信息可由監(jiān)控軟件實(shí)時(shí)監(jiān)測(cè),驗(yàn)證了安全系統(tǒng)狀態(tài)運(yùn)行監(jiān)控軟件的監(jiān)控功能,同時(shí)也證明了所設(shè)計(jì)半實(shí)物仿真測(cè)試系統(tǒng)的有效性。
4.3 接口時(shí)延測(cè)試
RVIP的交互時(shí)延是保障網(wǎng)絡(luò)化彈藥半實(shí)物仿真實(shí)時(shí)性和有效性的重要指標(biāo)之一。本文對(duì)半實(shí)物接口進(jìn)行了50次交互時(shí)延測(cè)試,實(shí)驗(yàn)結(jié)果如圖15所示,其最大接口時(shí)延約為0.64 ms,平均延時(shí)約為0.492 ms。半實(shí)物數(shù)據(jù)接口在半實(shí)物仿真測(cè)試過(guò)程中產(chǎn)生的延時(shí)在可接受范圍內(nèi),具有良好的交互實(shí)時(shí)性。

圖15 安全系統(tǒng)狀態(tài)運(yùn)行監(jiān)控模型交互時(shí)延Fig.15 Interaction delay of safety system state monitoring model
5 結(jié)論
本文針對(duì)網(wǎng)絡(luò)化彈藥研究測(cè)試成本高、可重復(fù)性差等問(wèn)題,提出一種基于QualNet仿真平臺(tái)的網(wǎng)絡(luò)化彈藥起爆控制半實(shí)物仿真測(cè)試系統(tǒng),開(kāi)發(fā)了安全系統(tǒng)狀態(tài)運(yùn)行監(jiān)控軟件及RVIP,通過(guò)對(duì)安全系統(tǒng)狀態(tài)運(yùn)行監(jiān)控軟件監(jiān)控功能的測(cè)試證明了系統(tǒng)的有效性。得出以下主要結(jié)論:
1) 本文提出的安全系統(tǒng)狀態(tài)運(yùn)行監(jiān)控軟件可實(shí)現(xiàn)對(duì)彈藥節(jié)點(diǎn)的控制和監(jiān)測(cè)。
2) 本文設(shè)計(jì)的RVIP、安全系統(tǒng)狀態(tài)運(yùn)行監(jiān)控模型實(shí)時(shí)性強(qiáng),對(duì)用戶體驗(yàn)影響極小。
3) 本文提出的基于QualNet仿真平臺(tái)的網(wǎng)絡(luò)化彈藥動(dòng)態(tài)控制半實(shí)物仿真測(cè)試架構(gòu)具有很強(qiáng)的可行性,有效地降低了網(wǎng)絡(luò)化彈藥的測(cè)試成本,能夠?yàn)榫W(wǎng)絡(luò)化彈藥的研究和測(cè)試工作提供有力的技術(shù)支撐。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32