復雜背景下顯著度表征的車輛偽裝效果動態評估
2023-07-10 03:08:34王冬高欽和黃通劉志浩高蕾
兵工學報 2023年6期
王冬,高欽和,黃通,劉志浩,高蕾
(火箭軍工程大學 導彈工程學院,陜西 西安 710025)
0 引言
現代戰爭中,地面戰場受到搭載于多種觀測平臺(衛星、偵察機、無人機)的多種傳感器(可見光、紅外、多/高光譜、雷達)的高頻重訪探測,實時形成多空間、多時間、多光譜分辨率和多極化、多角度的二維數字圖形,對感興趣目標(TOI)進行偵測識別[1]。軍事高價值目標被發現往往意味著被摧毀,軍事迷彩從亮度、顏色、紋理和輪廓等方面通過相似設計、紋理變形使目標與背景在視覺上融為一體,降低被發現概率,起到“隱真”的偽裝效果[2]。因此客觀評估并提升武器裝備的偽裝效果,降低被發現概率,是增強武器裝備生存能力的關鍵。雖然不同平臺和傳感器的成像原理迥異,但對TOI的偵測識別都是從復雜地面二維數字矩陣中查找出顯著目標的過程。作為隱蔽方,目標偽裝后與背景的融合度越高,顯著度越小,被發現概率就越低,相應的偽裝效果也越好。因此可通過對偽裝后目標相對于背景的顯著度分析來評估偽裝效果的優劣。
目前廣泛采用人眼視覺注意機制的目標顯著度的主觀和客觀計算方法[3]。主觀方法是對人為目視觀察結果進行統計分析,容易受人力、物力和天氣等客觀條件和觀察員主觀能力的影響,具有較大的局限性[4]。客觀方法通過人工提取顯著度特征進行評估[5-6],或用神經網絡提取深度特征進行顯著圖描述[7],對裝備的偽裝設計和作戰使用具有較好的指導作用。其中,基于空海背景的目標探測和偽裝隱身技術研究較多,胡建明等[8]研究了天基觀測復雜環境要素對目標可探測性的影響規律。宋明珠等[9]用海浪譜理論及尾跡模型對暗弱海洋目標的可探測性進行了研究。而地面車輛目標探測和偽裝研究,受限于地貌背景復雜性和目標小尺寸特點,主要在局部顯著性特征或特定環境條件下展開。趙曉楓等[10]構建單步多框目標檢測(SSD)網絡對復雜背景下特種車輛的紅外隱身偽裝效果進行了評估。馬世欣等[11]等從光譜差異性和整體偽裝特征的顯著性指標對高光譜偽裝效果評估方法進行了研究。王展等[6]著重用5項光學特征對不同迷彩偽裝狀態進行了多指標綜合評價。相對于空海背景下的目標偽裝性能研究,復雜地貌背景下,面向作戰任務,針對機動車輛迷彩偽裝效果進行動態綜合評估的研究還需進一步加強。
因此,本文從地面車輛在復雜地貌背景下的顯著度入手,提取目標和背景超像素圖像的多尺度多維特征,引入本地顯著度和目標顯著度概念,采取復相關系數和變異系數法進行特征篩選降維,提出一種復雜地貌背景下基于背景超像素和顯著度綜合表征的迷彩偽裝效果評估方法。實驗驗證表明,該方法能夠基于偵察二維圖像,對車輛目標在復雜地貌背景下的偽裝效果進行量化評估,為偽裝設計和作戰運用優化提供量化支撐。
1 復雜地貌背景下目標綜合顯著度表征
相對于較為單一的天空和海面背景,復雜地貌背景具有自然特征復雜性、偽裝影響復雜性和仿真建模復雜性等特點[12]。自然特征的復雜性是指環境要素和地貌特點多樣,地面車輛的戰場背景包括不同類型的林地、草甸、戈壁、公路以及散落的民居等多種地貌。偽裝影響復雜性是指偽裝目標在地面戰場活動時,受自然特征復雜性影響,目標偽裝方案與背景的耦合偽裝效應動態多變。受制于自然特征復雜性和偽裝影響的復雜性,仿真建模復雜性是指在偽裝效果仿真研究中,對于不同的需求,對目標所在地貌環境的仿真建模,要多方面考慮采樣顆粒度、環境分辨率和仿真資源等因素,導致動態偽裝效果評估中的仿真復雜性。基于此,本文用地面目標在復雜背景中實時的綜合顯著度來表征其動態偽裝效果。
目標在復雜地貌背景上的綜合顯著度Sa,有Sa∈[0,1],當Sa接近0時,表示目標與背景高度融合,具有較好的偽裝效果;當Sa接近1時,表示目標明顯異于背景,偽裝效果較差。Sa由兩部分組成(見圖1):一是目標所處背景局部區域相對于整個背景圖像的視覺特征顯著度,即本地顯著度SaL;二是目標相對所處背景局部區域的視覺特征顯著度,即目標顯著度SaT。

圖1 復雜地貌背景下目標顯著度表征Fig.1 Saliency characterization of target in complex landform background
1.1 本地顯著度的超像素鄰域表征
1.1.1 背景圖像的超像素分割
超像素是指將圖像中具有相似特征的相鄰像素劃分為有一定同質性的圖像塊,以超像素塊為基本單位,代替大量的像素來表達圖像特征,能夠大大減少處理圖像的復雜度。而在迷彩偽裝效果評估中,車輛目標所處的地域大多含有林地、公路、散落民居等不均勻地貌,用適量的超像素塊表達復雜地貌背景,降低圖像處理復雜度的同時,保證評估維度,對有限的背景圖像進行特征挖掘,有利于顯著度特征的篩選。
常用的超像素分割算法主要有基于圖論和梯度下降的方法兩類,顯著度檢測較常用的是基于梯度下降的簡單線性迭代聚類(SLIC)算法[13]。它在CIE-Lab顏色和二維坐標空間構造的5維特征向量空間里,以加權的顏色和坐標空間的歐式距離度量特征距離:
(1)
式中:DCIE-Lab為P1、P2兩個像素在CIE-Lab顏色空間三通道向量的歐氏距離,DCIE-Lab=‖P1(L,a,b)-P2(L,a,b)‖,‖·‖ 表示歐式距離;m調節顏色和位置的權重,一般取m=20;Dco為P1、P2兩個像素坐標的歐式距離,Dco=‖P1-P2‖。算法使用特征距離進行迭代聚類,每輪迭代將像素點與其所屬種子點的特征距離作為迭代聚類誤差。在偽裝偵察效果評估中,背景初始超像素大小根據車輛目標長度l來確定,取步長為2l,則初始超像素個數K=floor(N/4l2),N為圖像像素總數,圖2為不同個數背景超像素分割結果示例。

圖2 背景圖像的超像素分割Fig.2 Superpixel segmentation of background image
1.1.2 基于鄰接超像素對比的本地顯著度
目標所在背景超像素塊的本地顯著度,取決其與周圍鄰域超像素的關鍵特征差異,采用鄰接超像素對比方法構建背景本地顯著度表征[14],如圖3所示。圖3中黃色點為當前評估超像素塊,與之相鄰共享一個邊緣的藍色點為鄰接超像素節點。圖3中臨接超像素節點總數為N,中心節點顯著度采用鄰接超像素對比模型進行局部差異性計算,節點表示所在超像素j與中心超像素i顯著度特征向量的歐氏距離,節點相互連接的邊代表該超像素對中心超像素顯著度的影響權值ω,受鄰接超像素特征差異大小約束,差異越大、權重越大,差異越小權重越小。

圖3 鄰接超像素對比模型Fig.3 Adjacent superpixel comparison model
中心超像素i相對于臨接超像素的顯著度即本地顯著度表示為
(2)

1.2 目標顯著度表征
目標與所處背景塊的視覺特征差異度計算,首先要將目標圖像與背景圖像進行同質化預處理,使目標圖像格式、分辨率和大小與地貌背景一致,剔除原目標圖像無關像素,將目標圖像視為一個超像素與背景各超像素進行特征比對,計算目標圖像與背景超像素的距離,歸一化后得目標顯著度:
SaT=dis(FT,FGi)
(3)
式中:FT為車輛目標特征向量;dis代表兩向量的距離。根據不同特征可以采用絕對距離、歐氏距離和特征直方圖的交等多種距離計算方式。
1.3 目標相對背景綜合顯著度表征
本地顯著度SaL與目標顯著度SaT綜合形成目標相對背景的綜合顯著度Sa,因此Sa可表示為二維向量空間{SaL,SaT},SaL∈[0,1],SaT∈[0,1]到實數域Sa∈[0,1]的一組泛函:
(4)
綜合顯著度函數是式(4)表示泛函中由向量(SaT,SaL)到實數Sa的某一函數Sa=f(SaT,SaL)。從本地顯著度與目標顯著度的關系可得,綜合顯著度屬于0到1 的閉區間;當本地顯著度與目標顯著度均為1時,綜合顯著度也為1;目標顯著度為0,綜合顯著度也為0;本地顯著度為0,綜合顯著度等于目標顯著度;目標顯著度為1,綜合顯著度也為1。因此,綜合顯著度函數滿足邊界約束條件:
(5)
在以上邊界條件之外的區域,這樣一組泛函不存在極值約束條件,無法用變分法求解綜合顯著度函數。但通過函數影響關系分析可知,本地顯著度越大,其對目標顯著度是累加作用越明顯,即綜合顯著度與目標顯著度的差也越大。而在目標顯著度和本地顯著度兩個方向上,綜合顯著度均為單調遞增,即兩個方向的梯度均不小于0。綜合邊界條件式(5)及以上分析,選用冪函數進行計算機迭代驗算,綜合顯著度函數可表示為
(6)
式中:σ為本地顯著度影響強度因子,是背景復雜度的反映,地貌越復雜,本地顯著度對綜合顯著度影響越大,σ也就越大。取背景中亮度、顏色、紋理、斑點等視覺特征差異度作為評估要素,依據作戰任務環境確定灰類和隸屬度函數,采用灰色聚類法確定背景復雜度和顯著度影響因子σ,如圖4所示。

圖4 綜合顯著度函數Fig.4 Comprehensive saliency function
2 顯著度特征提取篩選
2.1 基于人類視覺模型的偽裝圖像多維特征提取
人類視覺顯著度計算模型分為自底向上(UP)和自頂向下(TD)的兩類[15]。對復雜地貌背景下地面車輛目標的探測識別,實時性和快速性要求高,基于數據驅動、無任務及先驗知識參與的UP模型具有更強的適應性,目前經典的視覺顯著度計算模型如表1所示。

表1 經典視覺顯著度模型及其表征Table 1 Classical visual saliency model and its characterization
綜合分析現有視覺顯著度的算法,偽裝目標的暴露征候,包括復雜背景和車輛迷彩偽裝后圖像的亮度、顏色、紋理、斑點、輪廓、頻域和距離等方面的差異性,本文從統計特征、結構特征和頻域特征三方面提取目標和偵察圖像9個維度特征。
2.1.1 統計特征
2.1.1.1 CIE-Lab空間亮度
CIE-Lab空間亮度值為L通道值,其取值范圍 0~100。x、y兩圖的平均亮度為Lx、Ly,其差異為
D1=|Lx-Ly|
(7)
2.1.1.2HSV空間顏色
采用HSV顏色空間直方圖進行顯著度表征[24]。H表示圖像的色相,取值范圍為0°~360°,S、V分別表示圖像的飽和度和亮度,取值范圍為0~1。將H、S、V三個通道的值域分別量化為12、5、5個區間,顏色特征量為C=12H+5S+V,共300個區間,用HSV量化直方圖的交表征顏色差異度:
(8)
式中:Hx(i)、Hy(i)分別為x、y兩張圖像量化直方圖中第i個區間C值數量占比。
2.1.1.3 Hu矩
圖像的Hu矩是一種具有平移、旋轉和尺度不變性的圖像特征[25],灰度圖像的7個Hu不變矩φ1~φ7構成特征向量FHu=[φ1,φ2,φ3,φ4,φ5,φ6,φ7],x、y兩圖差異度為特征向量的歐式距離:
D3=‖FHux-FHuy‖
(9)
2.1.1.4 顏色矩
顏色矩是用R、G、B三通道空間直方圖的矩表征顏色特征的統計量[26],分別取三個通道的1階矩μR、μG、μB,2階矩σR、σG、σB和3階矩sR、sG、sB,構成特征向量Fcol=[μR,μG,μB,σR,σG,σB,sR,sG,sB],用歐式距離作為顏色差異度量:
D4=‖Fcolx-Fcoly‖
(10)
2.1.2 結構特征
2.1.2.1 GLCM紋理特征

(11)
2.1.2.2 結構相似性指數結構特征
圖像亮度、對比度和結構3個模塊構成結構相似性指數(Structure Similarity Index Measure,SSIM)結構特征[28],結構差異性表示為
(12)
式中:μx、μy、σx、σy、σxy分別為兩張灰度圖像x、y的平均灰度、灰度標準差和協方差。
2.1.3 頻域特征
2.1.3.1 低頻特征
二維離散余弦變換(DCT)將圖像從空間域轉換到頻率域的同時,舍棄高頻系數,保留低頻系數,低頻系數體現目標的輪廓和灰度分布特性。采用局部二值模式(LBP)[29]提取低頻特征,使用歐氏距離進行差異性表征:
(13)
2.1.3.2 譜殘差特征
譜殘差(SR)方法[17]是圖像二維離散傅里葉變換后,進行對數譜分析,提取光譜域的譜殘差,返回空間域進行顯著度特征提取和對比。用SR方法生成圖像的顯著圖,提取的LBP和pHash值進行顯著度分析:
(14)
(15)
2.2 目標與背景多尺寸多維顯著度矩陣
在迷彩偽裝效果評估中,需要考慮車輛在多種偵察手段下不同分辨率圖像的顯著度特征。根據分辨率由高到低分別構建背景和目標圖像的多尺度圖像,將背景圖像分割為k個超像素,對應層級的車輛圖像分別與k個超像素塊進行差異度對比,形成多尺度多維特征距離矩陣。
第r(r∈{1,2,…,R})個尺度下,車輛與背景的k個超像素之間的9個特征距離向量構成目標距離矩陣:
(16)
第r個尺度下,背景的k個超像素之間每個特征距離均構成1個對稱矩陣,共9個背景超像素距離矩陣:

(17)
由于距離度量量綱不同,矩陣中各維向量存在大小不一的情況,有時相差很大,需要將向量歸一化到相同的區間。采用高斯歸一化方法分別計算各特征向量的均值m和方差σ,用式(18)將各距離向量歸一化到[0,1]區間。
(18)
(19)
每個背景的9個特征距離矩陣歸一化后,采用鄰接超像素模型,形成背景顯著度單一特征顯著度向量,組合得到單尺度的背景各超像素的本地顯著度矩陣:
(20)
將R個不同尺度的顯著度矩陣整合后形成R×9維的目標顯著度矩陣和本地顯著度矩陣。
(21)
(22)
根據式(6),得到目標多維多尺度的綜合顯著度矩陣:
(23)
2.3 多維顯著度特征篩選降維
顯著度特征矩陣從多尺度多角度反映車輛目標相對于背景的顯著度特征,但是多維特征矩陣存在特征冗余和信息含量不均衡的問題,因此需要對多維顯著度特征進行篩選降維。降維從不同尺度到維度組合,采用復相關系數(Complex correlation coefficient,CRR )法和變異系數(Coefficient of variation,CV )法循環剔除的方法。
2.3.1 復相關系數法的冗余特征剔除
多維顯著度特征不僅要定量描述目標和復雜背景的差別,同一目標特征值之間不能存在明顯的相關性,復相關系數能夠度量一個變量與其他多個變量之間的線性相關程度,采用復相關系數法可以有效剔除顯著度特征矩陣中相關性高的重復特征。變量z與其他變量x1,x2,…,xk之間的復相關系數:
(24)

算法1
1:矩陣數據標準化,采用最大最小歸一化算法
2:設置復相關系數閾值e,若Rc≥e,認為相關性很強,剔除該特征,一般取e=0.9[30]
3:repeat(循環計算剩余維特征)
4:分別計算每一維特征與其他維特征的復相關系數
5:find復相關系數最大值Rmax及其特征序號i
6: ifRmax≥e
7: 剔除第i維特征
8: end if
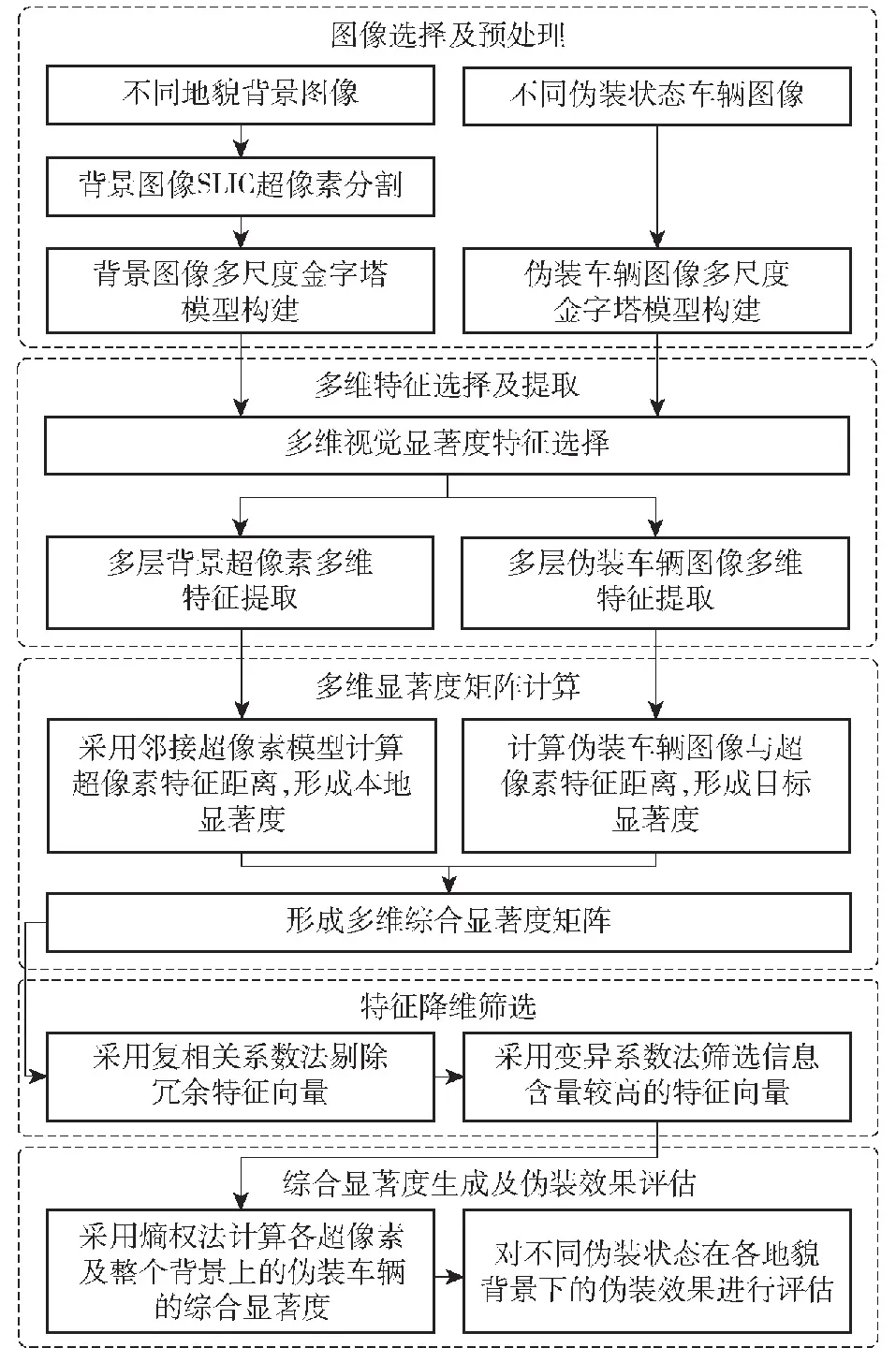
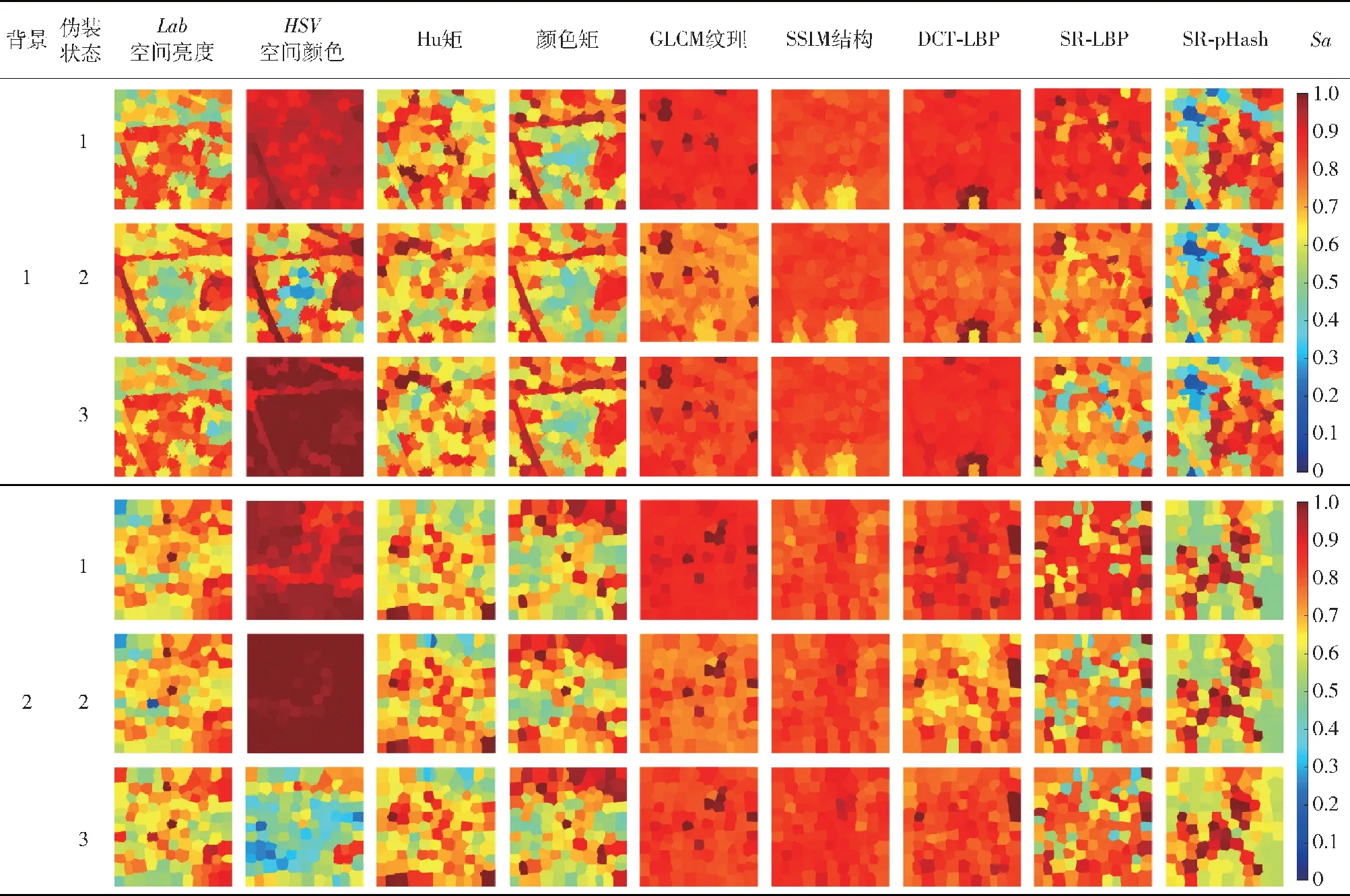
9:untilRmax 圖5 基于復相關系數的循環特征篩選算法 2.3.2 變異系數法的有效信息特征篩選 剔除相關性特征后,剩余特征中存在信息含量不高,對評估結果影響不大的指標也應該剔除。變異系數反映了特征單位均值上的離散程度,表示特征有效信息的含量,表示為 (25) 算法2 1:用式(25),計算n維特征各自變異系數 2:按照變異系數由大到小降序排列 CV(1)≥CV(2)≥…≥CV(n) 3:計算累積信息貢獻度 4:設定閾值r0=0.85[30] 5: ifrp≥r0≥rp-1 6: 保留前p個特征,剔除剩余特征 7: end if 圖6 基于變異系數累積信息的特征篩選算法 cumulative information of CV 2.3.3 多維顯著度矩陣特征篩選 式(23)的綜合顯著度矩陣,均包含R個尺度層和n個特征構成的R×n維的顯著度向量,需要對其進行降維處理,對于任一R×n維顯著度矩陣: (26) 提取第i個特征的R個尺度的顯著度向量,構成該特征R維的顯著度矩陣: (27) 計算各向量的變異系數CV,取變異系數最大的向量作為該特征的顯著度向量: (28) 原R×n維顯著度矩陣降維表示為n個特征顯著度向量組成的n維矩陣: (29) 依次采用CRR和CV算法,剔除Sa(n)中的冗余和信息含量不高的向量,顯著度特征矩陣由R×n維減少至p維,形成車輛圖像相對于背景各超像素的k×p有效顯著度矩陣: Sa=CV(CRR(Sa(n))) (30) 通過對矩陣向量進行最大變異系數、最大平均顯著度或綜合熵值法分析,可實現車輛相對于背景的偽裝效果的定量分析。 綜合復雜地貌背景、車輛目標和偽裝偵測手段,提出基于顯著度綜合表征的復雜背景下車輛目標迷彩偽裝效果評估方法,如圖7所示。 圖7 復雜背景下車輛迷彩偽裝效果評估方法Fig.7 Evaluation method of vehicle camouflage effect in complex background 具體步驟如下: 1)圖像預處理。根據偵察分辨率級別,確定圖像尺度層數,分別對目標和背景進行多尺度劃分,同尺度目標和背景圖像同質化處理;根據目標與背景尺寸,確定超像素個數,對背景圖像進行超像素分割; 2)多維特征提取。選取評估特征,分別提取目標和各超像素的多維度特征,構造多維度特征向量矩陣; 3)本地和目標顯著度計算。確定特征差異性計算方法,分別計算目標與各超像素、各超像素之間的特征差異值,對差異值進行歸一化處理,形成多維多尺度本地和目標顯著度矩陣; 4)多維多尺度顯著圖生成。根據背景各超像素差異性,使用綜合顯著度表征方法,形成目標與各超像素的多維多尺度綜合顯著度表征; 5)多維特征篩選。使用CRR算法剔除冗余特征,使用CV算法優選信息含量較高特征,形成有效顯著度特征矩陣; 6)迷彩偽裝效果評估。根據評估需求和有效顯著度矩陣,采用熵權法計算綜合顯著度,進行車輛迷彩偽裝效果評估。 為了進一步驗證算法的可行性和應用性,評估機動車輛在航空可見光偵察下的偽裝效果,收集不同的航拍背景圖像和車輛偽裝狀態圖像,提取多維特征進行比對,計算各偽裝狀態在不同背景下的顯著度,分析其環境適應性和偽裝效果。 從DOTA遙感圖像目標識別數據集[31]中選擇遙感背景圖像,以2張具有典型代表特征的地面光學遙感圖像作為示例,其中背景1為含有公路的夏季叢林地貌背景,背景2為含有道路和水泥場地的戈壁荒漠背景。截取待評估車輛長度10倍幅寬,視場尺寸為200 m×200 m、大小為2 000像素×2 000像素、分辨率為254 dpi的原始背景圖像,等效偵察分辨率為0.1 m,按超像素數k=10×10進行SLIC分割,如表2所示。兩個復雜地貌背景,經超像素分割形成了相對單一的超像素特征塊,包括叢林、草甸、荒漠等自然地貌,和混凝土公路、水泥場坪、一般道路等人工地貌,各超像素塊的光學特征差異明顯。 表2 背景圖像及超像素分割Table 2 Background image and superpixel segmentation 某型特種車輛進行3種不同狀態的偽裝:狀態1為車輛自身大斑點叢林迷彩涂裝狀態,車輛本體表面涂覆光學迷彩偽裝材料,形狀和結構特征未遮蔽;狀態2為車輛覆蓋全波段數碼叢林迷彩偽裝網,模擬叢林地貌特征,偽裝網緊密覆蓋車輛,遮蔽了部分結構特征,未做變形展開,為機動偽裝狀態;狀態3為覆蓋全波段數碼荒漠迷彩偽裝網,模擬戈壁荒漠地貌特征,偽裝網變形展開,遮蔽結構和形狀特征,為固定隱蔽待機狀態。采集3種偽裝狀態無人機俯拍圖像裁剪后,與背景圖像進行同質化處理,偽裝圖像所代表實際尺寸不變,調整圖像分辨率為254 dpi,使偽裝圖像等效偵察分辨率與背景圖像相同均為0.1 m,保留偽裝狀態特征的同時,使偽裝狀態圖像與背景圖像相匹配。 根據典型軍事探測手段,按照等效偵察分辨率0.1 m、0.2 m、0.5 m、1.0 m,將3個目標和2個背景圖像分別處理為254 dpi、127 dpi、50 dpi、25 dpi 4個不同尺度圖像,各層對應2個背景圖像和3個偽裝狀態圖像。 按照2.1節中選取的9個視覺特征,在同一尺度層下,提取車輛的3種偽裝狀態和2個背景圖像所有超像素的特征向量;根據9個視覺特征的差異度計算公式,分別計算目標與各超像素和各超像素之間的特征距離,用式(18)歸一化,按2.2節構造顯著度矩陣,各特征優選顯著度變異系數最大的向量,采用綜合顯著度公式(23),背景復雜強度因子σ=1,得到各目標圖像相對各背景圖像的顯著圖,形成包含3個車輛偽裝圖、2個背景、9個特征共 54張顯著圖,如表3所示。由表3可以看出:不同背景和車輛之間在各特征上的顯著度明顯不同;同背景和目標的情況下,不同超像素代表不同的地貌特征,其顯著度也有較大差異。 表3 3種偽裝狀態在2類背景下9個特征的顯著熱力圖Table 3 Saliency thermal maps of 9 features in 3 camouflage states under 2 types of background 計算9個特征在車輛不同偽裝狀態相對背景超像素構成的顯著度向量的復相關系數和變異系數,如圖8所示。圖8(a)、圖8(b)分別是3種偽裝狀態對于兩個背景超像素顯著度向量的復相關系數,偽裝狀態2在在背景1上,特征Lab亮度和HSV顏色的相關系數分別為0.95和0.93,大于算法1中閾值0.9,為該偽裝狀態在背景1上進行迷彩偽裝效果評估可剔除特征。圖8(c)、圖8(d)分別是3種偽裝狀態對于兩個背景超像素顯著度向量的變異系數,其中GLMC紋理、SSIM結構和DCT-LBP 3個特征的變異系數都比較低,說明其信息含量較小,對后續迷彩偽裝效果評估貢獻量也較小。特征篩選后的有效特征如表4所示。 表4 篩選后有效特征Table 4 Effective characteristics after screening 圖8 各特征顯著度復相關系和變異系數Fig.8 CRR and CV of saliency degree with each feature 4.3.1 偽裝效果關鍵特征分析 有效特征向量中變異系數最大和平均顯著度最大的特征分別代表偽裝狀態對背景相對較敏感和顯著的特征。3個偽裝狀態相對于2個背景的最大變異系數和最大平均顯著度特征如表5所示,偽裝狀態的SR-pHash特征,即圖像二維離散傅里葉變換所提取光譜域的譜殘差對背景變化比較敏感。車輛偽裝后SR-LBP 和顏色矩兩個特征相對背景比較顯著,據此可以作為對應偽裝狀態的重點特征加以改進。 表5 最大變異系數和最大平均顯著度特征Table 5 Features of max.CV and max.mean saliency 4.3.2 不同偽裝狀態優勢應用環境分析 由于復雜地貌背景的不均勻性,各有效特征在背景超像素上的顯著度差異明顯,特征維度上顯著度熵信息含量不同,據此采用熵權法確定有效特征的權重,加權計算各超像素上的綜合顯著度,生成按超像素塊劃分的車輛各偽裝狀態在背景圖像上的顯著圖,如表6所示。表6中不同色塊代表了偽裝狀態在各超像素上的顯著度大小,由藍到紅代表顯著度由0到1,藍色代表顯著度較低,紅色代表顯著度較高。表6中數字為背景圖像各超像素顯著度值的平均值,即為對應偽裝狀態在該背景上的有效特征的綜合顯著度。 表6 熵權法計算綜合顯著度Table 6 Comprehensive saliency calculated with entropy weight method 從表6中可以看出:在背景1中,偽裝狀態2的顯著度相對其余兩種狀態較低,為0.633,說明車輛覆蓋全波段數碼叢林迷彩偽裝網狀態在叢林地貌中能夠發揮較好的偽裝效果,偽裝狀態2的優勢應用環境為與背景1類似的地貌環境;在背景2中,偽裝狀態3的顯著度0.572最低,說明偽裝狀態3的相對優勢應用環境為與背景2類似的地貌環境;偽裝狀態1在兩種背景下的顯著度優勢相對不夠明顯。據此可確定各種偽裝狀態的優勢應用環境,依據任務地貌特點,進行顯著度更低的偽裝狀態選擇或變換,提高車輛偽裝的環境適應性和偽裝應用效果。 4.3.3 偽裝效果分析 3種偽裝狀態中,狀態1為車輛原始叢林迷彩涂裝,狀態2車輛覆蓋數碼叢林迷彩偽裝網,狀態3車輛進行了數碼荒漠迷彩的變形偽裝。以狀態1的原始涂裝的顯著度作為基準:在背景1下,狀態2覆蓋叢林迷彩偽裝網后顯著度由0.704降低為0.633,下降率即偽裝效果提升10.1%;在背景2下,相對于原始涂裝的偽裝狀態1,覆蓋數碼荒漠迷彩并進行了適度變形的偽裝狀態3,使顯著度由0.690降低至0.572,下降率即偽裝效果提升17.1%。說明相對于車輛原始涂裝,覆蓋數碼迷彩偽裝網,在各自優勢環境中能夠不同程度的提升偽裝效果,采用變形偽裝的狀態3,比不進行變形的偽裝狀態2多提高了7%。數據分析結果與偽裝實踐經驗一致,說明方法能夠客觀評估車輛不同背景下的偽裝效果。 另外,從表6可以看出,在背景1左下方有一條比較明顯的道路,分割為了7個相鄰的超像素,計算3種偽裝狀態在這7個超像素上顯著度的均值,狀態1~狀態3分別為0.732、0.720、0.608,說明車輛在該條道路上行進或待機時,采用顯著度最低的偽裝狀態3能夠起到較好的偽裝效果;相反的,若車輛采用偽裝狀態1或者狀態2在背景1內活動時,要盡量避開該道路,選擇其他顯著度較低偽裝效果較好的區域隱蔽以降低被發現概率。 本文提出一種基于復雜地貌背景和綜合顯著度表征的車輛迷彩偽裝效果評估方法,并對方法進行了計算驗證和結果分析。得出主要結論如下: 1)基于多維顯著度特征的迷彩偽裝效果評估方法,綜合車輛偽裝特征和背景地貌典型特征,結合車輛目標和背景的多尺度二維圖像,采用復相關系數和變異系數對冗余特征和信息含量較低的特征進行篩選降維,針對復雜地貌背景特點,綜合考慮了車輛偽裝方案和復雜地物背景的耦合關系,能夠滿足作戰流程下車輛目標的偽裝效果動態評估需求。 2)通過實驗驗證分析,不同偽裝狀態在不同背景下的顯著性表現差異明顯,顯著性特征也并不相同,除了人類視覺感知到的顏色、亮度等特征因素外,圖像頻域和結構也對顯著度有較大影響。方法更加符合偵察手段多樣化和機器識別深入發展的現狀,根據不同偽裝場景,從多種偽裝特征中篩選有效特征,提高了評估過程的客觀性和結果的全面性。 3)本文所提出的迷彩偽裝效果評估方法能夠結合作戰流程實時進行偽裝效果評估,為車輛運用環境、隱蔽區域和偽裝狀態選擇提供決策依據和參考。方法通過偽裝特征的選擇、提取和篩選,也可應用于紅外、雷達等二維偵察圖像的偽裝效果評估,具有一定的普適性和拓展性。
Fig.5 Cyclic feature screening algorithm based on CRR

Fig.6 Feature screening algorithm based on the3 車輛目標迷彩偽裝效果評估方法
4 實驗驗證及應用分析
4.1 圖像選取及超像素分割

4.2 顯著度特征計算及篩選


4.3 迷彩偽裝效果評估結果分析


5 結論
猜你喜歡
汽車工程師(2021年12期)2022-01-17 02:29:54
中老年保健(2021年12期)2021-11-30 02:58:01
當代陜西(2020年14期)2021-01-08 09:30:42
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
中華詩詞(2018年11期)2018-03-26 06:41:34
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
貴州師范學院學報(2016年4期)2016-12-01 03:54:07
Coco薇(2016年8期)2016-10-09 02:11:50