基于航電聯(lián)試環(huán)境下NAMP 故障分析研究
2023-07-08 07:35:34錢正陳林
科技與創(chuàng)新 2023年12期
錢正,陳林
(國營蕪湖機械廠,安徽 蕪湖 241007)
1 故障現(xiàn)象
某航空電子系統(tǒng)在內(nèi)場航電聯(lián)試環(huán)境下通電調(diào)試時,進行NAMP 性能檢查,通過飛機參數(shù)記錄系統(tǒng)判讀數(shù)據(jù),發(fā)現(xiàn)NAMP 系統(tǒng)時標(biāo)存在無規(guī)律的跳變現(xiàn)象。
2 系統(tǒng)原理
NAMP 作為飛機航空電子系統(tǒng)的一個子系統(tǒng),主要實現(xiàn)對非航空電子系統(tǒng)的監(jiān)控管理及其余航空電子系統(tǒng)之間的接口管理的功能,是非航空電子系統(tǒng)的故障檢測中心[1]。NAMP 用于完成航空電子系統(tǒng)與非航空電子系統(tǒng)之間的接口管理,還可以對非航空電子系統(tǒng)進行數(shù)據(jù)采集和轉(zhuǎn)換處理,并啟動對非航空電子系統(tǒng)的機上自檢測。NAMP 主要監(jiān)控大氣系統(tǒng)、飛參系統(tǒng)、環(huán)控系統(tǒng)、液壓系統(tǒng)、進氣道系統(tǒng)、起落架信號系統(tǒng)等非航空電子系統(tǒng)的狀態(tài),采集非航空電子系統(tǒng)的各種電壓、電流、數(shù)字、離散信號[2],根據(jù)飛行員請求,傳送非航空電子系統(tǒng)數(shù)據(jù)至多功能顯示器上進行顯示。NAMP 機上部分交聯(lián)關(guān)系如圖1 所示。

圖1 NAMP 機上部分交聯(lián)關(guān)系圖
通過手動按壓多功能顯示器的周邊按鍵,NAMP開始啟動自檢,多功能顯示器通過RS-422 串口數(shù)據(jù)通道與顯示控制管理處理機通信,顯控控制管理處理機通過1553B 總線通知NAMP 開始啟動維護自檢,NAMP 開始自檢,自檢結(jié)束后,通過1553B 總線告知顯示控制管理處理機并在多功能顯示器上顯示自檢結(jié)果。另NAMP 通過RS422 總線與飛機參數(shù)記錄系統(tǒng)進行通信,實時地接收、記錄從NAMP 發(fā)送的航電系統(tǒng)日歷時標(biāo)信息、NAMP 系統(tǒng)時標(biāo)信息、起落架系統(tǒng)狀態(tài)等信息。通過地面判讀飛機參數(shù)記錄系統(tǒng)的數(shù)據(jù),可對這些信息進行回放,檢查各系統(tǒng)工作是否有異常。
3 航電聯(lián)試環(huán)境說明
飛機綜合航電系統(tǒng)聯(lián)試聯(lián)調(diào)環(huán)境(以下簡稱為“聯(lián)試環(huán)境”)能夠根據(jù)飛機航電系統(tǒng)研發(fā)以及飛機維修后的需求特點,利用仿真/激勵和測試手段,完成航電系統(tǒng)的單設(shè)備裝前檢查、多設(shè)備檢查、全航電系統(tǒng)檢查、系統(tǒng)靜態(tài)檢查、系統(tǒng)動態(tài)檢查、系統(tǒng)數(shù)據(jù)測試等多項任務(wù),可以對大修后設(shè)備進行功能、接口、控制邏輯、顯示等裝前檢查,以確認大修后的航電系統(tǒng)各設(shè)備是否滿足技術(shù)要求和裝機要求,為維修后的航電系統(tǒng)裝機提供試驗依據(jù)[3]。
可根據(jù)不同的檢查項目和設(shè)備條件靈活配置航電綜合仿真/激勵系統(tǒng),對于所有分系統(tǒng),既可接實物,也可接仿真器或地面試驗件,具有高度綜合、靈活的特點[4]。可完成載機的剖面仿真和交互式仿真,模擬空中飛行試驗。
航電聯(lián)試環(huán)境由試驗臺、航電系統(tǒng)仿真器、試驗管理系統(tǒng)、綜合激勵器、飛行仿真系統(tǒng)、結(jié)果生成系統(tǒng)、武器模擬器、雷達、光電雷達視頻生成器、激勵器/模擬器、實時網(wǎng)絡(luò)、顯示系統(tǒng)以及試驗電纜、電子系統(tǒng)設(shè)備安裝架等組成。航電聯(lián)試環(huán)境組成簡要框圖如圖2 所示。

圖2 航電聯(lián)試環(huán)境組成簡要框圖
4 故障復(fù)現(xiàn)
4.1 飛參記載的時標(biāo)曲線
將該件NAMP 產(chǎn)品放置于聯(lián)試環(huán)境,建立該故障發(fā)生的工作剖面,工作一段時間后,通過查看原始飛參數(shù)據(jù)記錄,正常的1系統(tǒng)時標(biāo)是一條光滑的斜線,而異常的系統(tǒng)時標(biāo)是一條有跳變和毛刺的斜線,如圖3、圖4 所示。
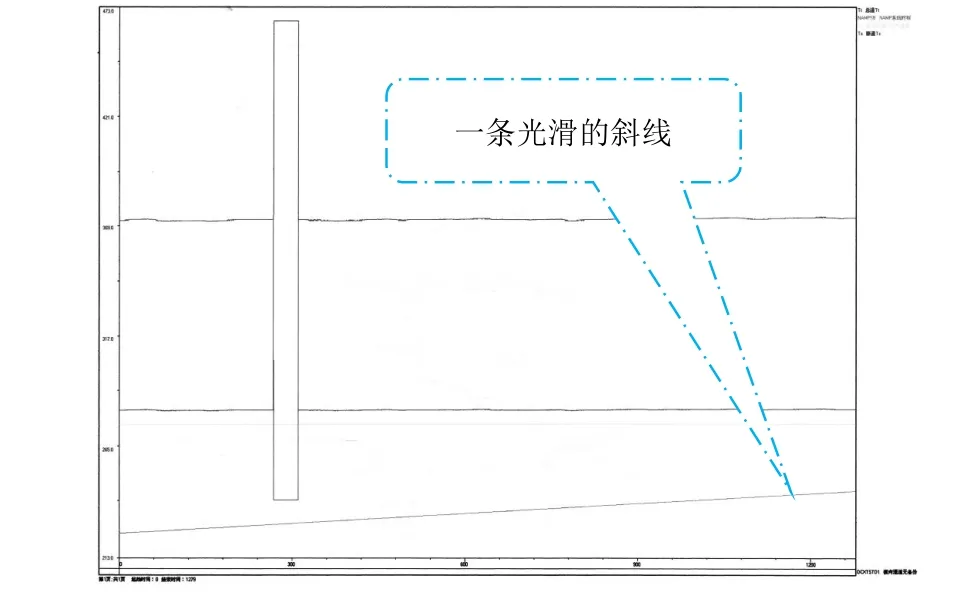
圖3 飛參記錄的正常NAMP 系統(tǒng)時標(biāo)曲線
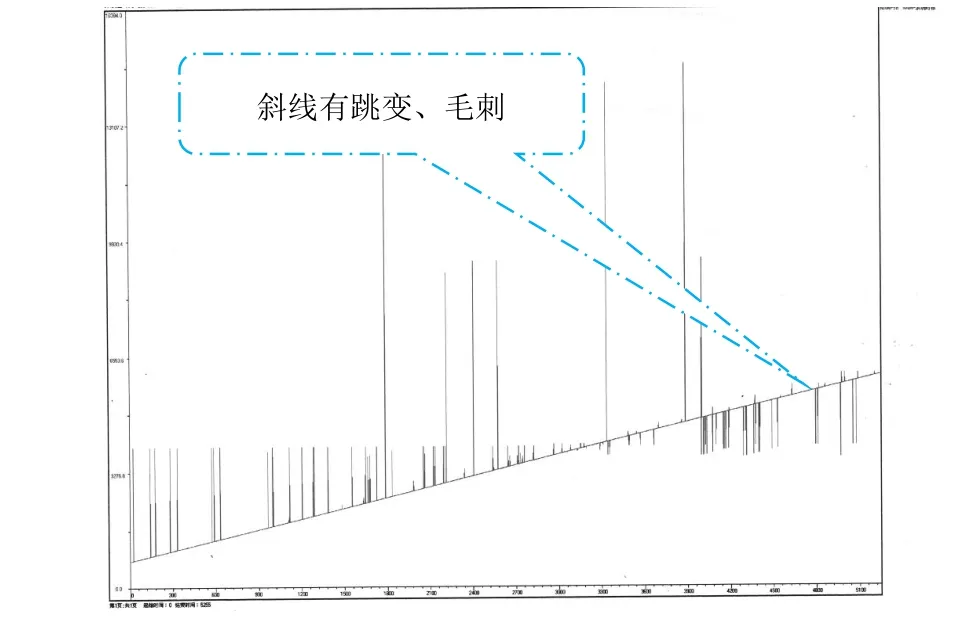
圖4 飛參記錄的異常NAMP 系統(tǒng)時標(biāo)曲線
4.2 飛參與NAMP 通信原理分析
NAMP 與飛參之間通信的最小信息單位是URAT字,每個URAT 字由11 位二進制數(shù)組成,每個UART字按低位到高位的先后順序串行傳送。對于16 位二進制數(shù)據(jù)分成兩個UART 字,按由低位字節(jié)到高位字節(jié)的先后順序傳送。通信傳送的基本單位是通信包,通信包最大為29×16 bits,由包頭、包狀態(tài)、包數(shù)據(jù)、包尾組成,最后是校驗和字。NAMP 給飛參一共發(fā)送3 個通信包共29 個字。第1 包數(shù)據(jù)主要含航電系統(tǒng)日歷時標(biāo)信息,第2 包數(shù)據(jù)含NAMP 系統(tǒng)時標(biāo)、發(fā)動機、進氣道系統(tǒng)狀態(tài)信息,第3 包數(shù)據(jù)包含航電子系統(tǒng)故障數(shù)據(jù)及無線電高度信息。
NMAP 與飛參422 通信采用MAXIM 公司的MAX488 收發(fā)器,該芯片內(nèi)含1 個驅(qū)動器和1 個接收器,同時具有低功耗、驅(qū)動器有過載保護等特點,器件共模輸入電壓范圍在-7~+12 V 之間,原理如圖5所示。
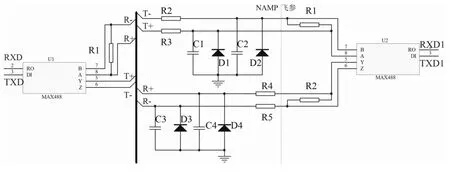
圖5 MAX488 收發(fā)器電路圖
4.3 NAMP 系統(tǒng)時標(biāo)跳變現(xiàn)象原因分析
NAMP 非航空電子系統(tǒng)監(jiān)控處理機周期性發(fā)送給飛參記錄器的系統(tǒng)時標(biāo)值是NAMP中MBI總線通信模塊上記錄的RTC 時鐘值,該時鐘值在一次加電過程中是連續(xù)增加的,一旦RTC 時鐘值出現(xiàn)錯誤,就有可能導(dǎo)致NAMP 發(fā)送給飛參記錄的系統(tǒng)時標(biāo)數(shù)據(jù)出現(xiàn)異常。
基本確認該故障現(xiàn)象主要由NAMP 非航空電子系統(tǒng)監(jiān)控處理機中 DIM 離散輸入模塊的JGAL16V8B-15LD 可編程通用邏輯電路XBS 邏輯設(shè)計不符合三態(tài)門輸出的設(shè)計特性所導(dǎo)致,具體如圖6所示。

圖6 可編程通用邏輯電路連接圖
XBS 邏輯輸出只有兩態(tài)“1”和“0”,不能輸出高阻態(tài)(相當(dāng)于斷開),會對CPU 通過LBE 內(nèi)總線讀取NAMP 系統(tǒng)時標(biāo)產(chǎn)生影響;LBE 總線訪問XBS 信號類型為集電極開路即OS 門設(shè)計,上述DIM 模塊的信號邏輯不規(guī)范設(shè)計影響了國產(chǎn)芯片XBS 信號輸出電平在低有效時保持0.8 V 以上(大約在1.6 V 左右),不符合TTL 低電平0~0.8 V(邏輯“0”)的要求,進而影響CPU 模塊LBE 總線RTC 接口電路的正常訪問,RTC(實時時鐘)訪問錯誤,造成NAMP 發(fā)送給飛參記錄的系統(tǒng)時標(biāo)數(shù)據(jù)字異常。
4.4 解決措施
針對NAMP 系統(tǒng)時標(biāo)存在無規(guī)律的跳變現(xiàn)象,有2 種解決方案:①將部分國產(chǎn)JGAL16V8B-15LD 可編程邏輯芯片更換成從美國進口的LATTICE 公司GAL16V8B(D)-15LD/883 芯片。由于無上拉電阻設(shè)計,對DIM 模塊的信號邏輯不規(guī)范設(shè)計能兼容,因而不會導(dǎo)致問題出現(xiàn)。②通過更改NAMP 非航空電子系統(tǒng)監(jiān)控處理機DIM1 離散輸入模塊中代號D6 國產(chǎn)芯片的邏輯設(shè)計,將部分國產(chǎn)JGAL16V8B-15LD 可編程邏輯芯片的內(nèi)部軟件版本進行升級,優(yōu)化接口輸出特性,即可解決NAMP 系統(tǒng)時標(biāo)的異常跳變問題。
5 結(jié)論
NAMP 計算機作為非航空電子系統(tǒng)的故障檢測中心,可對非航電系統(tǒng)及其自身的信息進行采集和綜合處理,實現(xiàn)狀態(tài)監(jiān)控和故障診斷,并將部分結(jié)果通過RS422 格式傳遞給飛機參數(shù)記錄系統(tǒng),為飛機的故障診斷提供依據(jù)[5]。但由于NAMP 時標(biāo)異常故障會導(dǎo)致輸出結(jié)果異常,給地面維護人員提供了錯誤信息。本文通過對NAMP 時標(biāo)故障進行原理分析,提出了2 種改進措施,一定程度上杜絕了NAMP 時標(biāo)故障發(fā)生,提高了產(chǎn)品的可靠性。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50