面向大型工業(yè)倉庫的多AGV綜合優(yōu)化調(diào)度方法
2023-07-06 01:01:16胡恩澤賀建軍申帥吳仁超
中南大學(xué)學(xué)報(自然科學(xué)版) 2023年5期
關(guān)鍵詞:方法
胡恩澤,賀建軍,申帥,吳仁超
(中南大學(xué) 自動化學(xué)院,湖南 長沙,410083)
隨著倉儲物流技術(shù)的發(fā)展,許多大型工業(yè)倉庫采用大規(guī)模的自動引導(dǎo)車(AGV)編隊來實現(xiàn)物料自動運輸,其每天需要處理幾千起搬運任務(wù),如何優(yōu)化調(diào)度使AGV 更高效地執(zhí)行任務(wù)成為當(dāng)前提升物流效率和降低倉儲成本的關(guān)鍵問題。AGV 調(diào)度最重要的目標(biāo)是最小化任務(wù)完成時間,其受到多項決策的影響[1]:
1) 任務(wù)定序分配。決定分配給每個AGV 的任務(wù)及執(zhí)行這些任務(wù)的順序。
2) 路徑規(guī)劃。為AGV 執(zhí)行被分配的任務(wù)時選擇最優(yōu)路徑,通常最優(yōu)路徑為耗時最少或距離最短的路徑。
3) 沖突管理。解決各AGV 之間可能發(fā)生的碰撞沖突。
以上3個問題是相互依存的[2],確定AGV的任務(wù)分配是計算路徑規(guī)劃的先決條件,在選擇AGV的執(zhí)行路徑后才能判斷碰撞沖突是否會發(fā)生[3]。大多數(shù)研究針對調(diào)度優(yōu)化的3 個問題提出了求解的方法[4-5]:
首先,在不考慮碰撞沖突的情況下單獨求解任務(wù)定序分配問題,得到最優(yōu)方案[6];
然后,為該方案選擇最優(yōu)的執(zhí)行路徑;
最后,考慮沖突管理問題,在發(fā)生沖突時建立“交通規(guī)則”等策略,指導(dǎo)AGV 停車等待或繞行來避免碰撞[7]。
然而,AGV 按照最優(yōu)的任務(wù)定序分配方案生成的最佳路徑去執(zhí)行任務(wù)時,很可能存在大量的碰撞沖突情況[8],頻繁等待或繞行會降低AGV 整體系統(tǒng)運行效率[9]。這些研究忽略了AGV 避免沖突的規(guī)避操作,導(dǎo)致存在計算之外的“延遲時間”[10],無法實現(xiàn)系統(tǒng)整體的最優(yōu)調(diào)度。綜上分析,調(diào)度中的3個問題是內(nèi)在關(guān)聯(lián)的,任務(wù)定序分配結(jié)果會對路徑規(guī)劃中碰撞沖突情況造成直接影響[11]。因此,在AGV 優(yōu)化調(diào)度問題中,任務(wù)定序分配、路徑規(guī)劃和碰撞沖突問題需要經(jīng)一體化綜合處理,進(jìn)而得到系統(tǒng)整體的最優(yōu)調(diào)度方案[12]。
針對AGV 綜合調(diào)度問題,MAZA 等[13]提出了預(yù)先規(guī)劃算法和實時路由算法,在路徑規(guī)劃過程中生成無沖突路徑。LIAN等[14]提出一種基于交通控制方法的綜合調(diào)度方法,實現(xiàn)了基于時間窗的調(diào)度和沖突管理。然而,這些方法不能有效提高AGV 整體系統(tǒng)效率。SINGH 等[15]研究了電量約束下的異構(gòu)AGV 綜合求解任務(wù)分配和路徑規(guī)劃問題,并提出了一種自適應(yīng)大鄰域搜索算法。然而,該方法沒有考慮AGV 之間的碰撞沖突。此外,一些基于精確算法的綜合調(diào)度優(yōu)化方法[16-17]被用于一體化求解任務(wù)定序分配和無沖突路徑問題,但任務(wù)定序分配結(jié)果對路徑規(guī)劃中造成的碰撞沖突情況無法確定,這些方法對每一種情況進(jìn)行分析時,需要消耗不合理的計算時間,無法應(yīng)用于大型工業(yè)倉庫實例。
針對以上問題,本文提出一種綜合優(yōu)化調(diào)度方法,體現(xiàn)在:
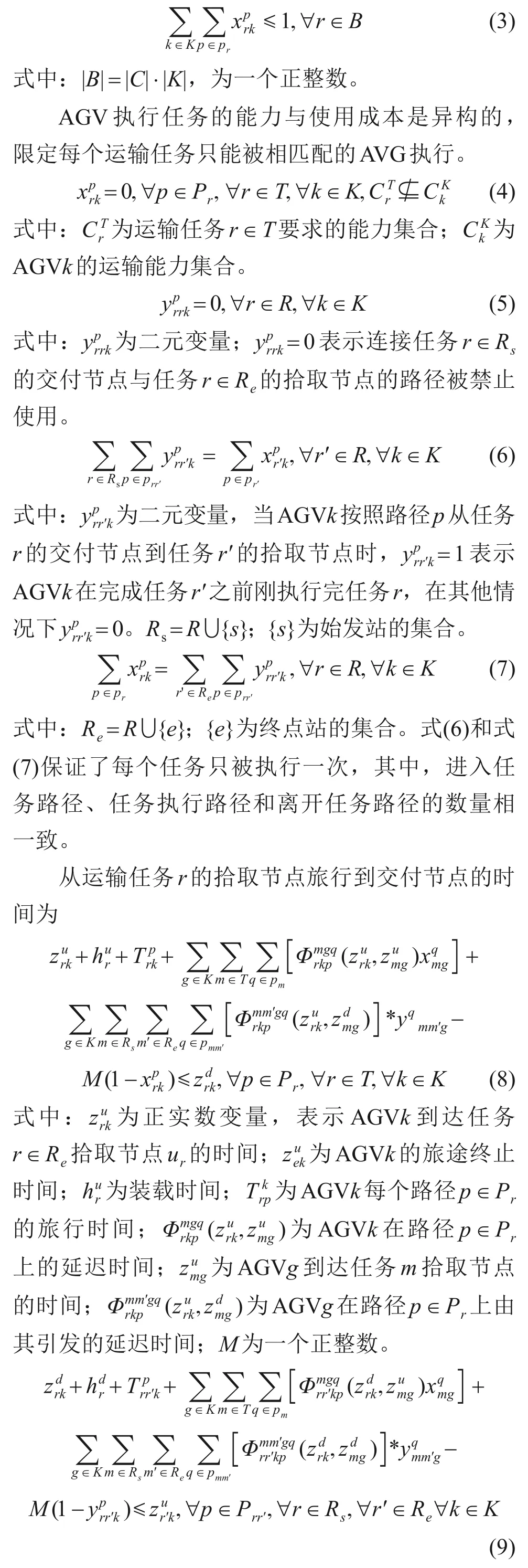
1) 建立一個混合整數(shù)線性規(guī)劃模型來描述異構(gòu)多AGV 的綜合調(diào)度問題,采用柵格法構(gòu)建倉庫地圖,定義任務(wù)執(zhí)行過程,提出路徑專家?guī)斓母拍睿此泻蜻x路徑的集合。針對現(xiàn)實工業(yè)倉庫對于AGV在速度與物料搬運能力的異構(gòu)性和AGV需要在適當(dāng)時間充電等問題,制定相應(yīng)的約束條件。
2) 提出一種基于分層規(guī)劃的綜合優(yōu)化調(diào)度方法,將綜合調(diào)度問題分解為聚合的上層任務(wù)定序分配問題和下層路徑規(guī)劃問題,在不考慮沖突的情況下生成上層問題的精英解集合,依次對集合中每個解在下層進(jìn)行基于路徑專家?guī)斓穆窂揭?guī)劃計算,記錄碰撞沖突結(jié)果并生成禁忌列表,將禁忌列表作為碰撞沖突的約束條件融入上層問題尋優(yōu)過程,最后通過迭代搜索得到滿足整體性能最優(yōu)的調(diào)度方案。
3) 提出一種混合離散狀態(tài)轉(zhuǎn)移算法(HDSTA),設(shè)計一種精英種群生成方法,引入路徑選擇程序和禁忌列表,提升算法搜索過程的多樣性能力與強化搜索能力。同時,為了在任務(wù)定序分配結(jié)果中合適的位置插入充電請求,提出2種插入算子。
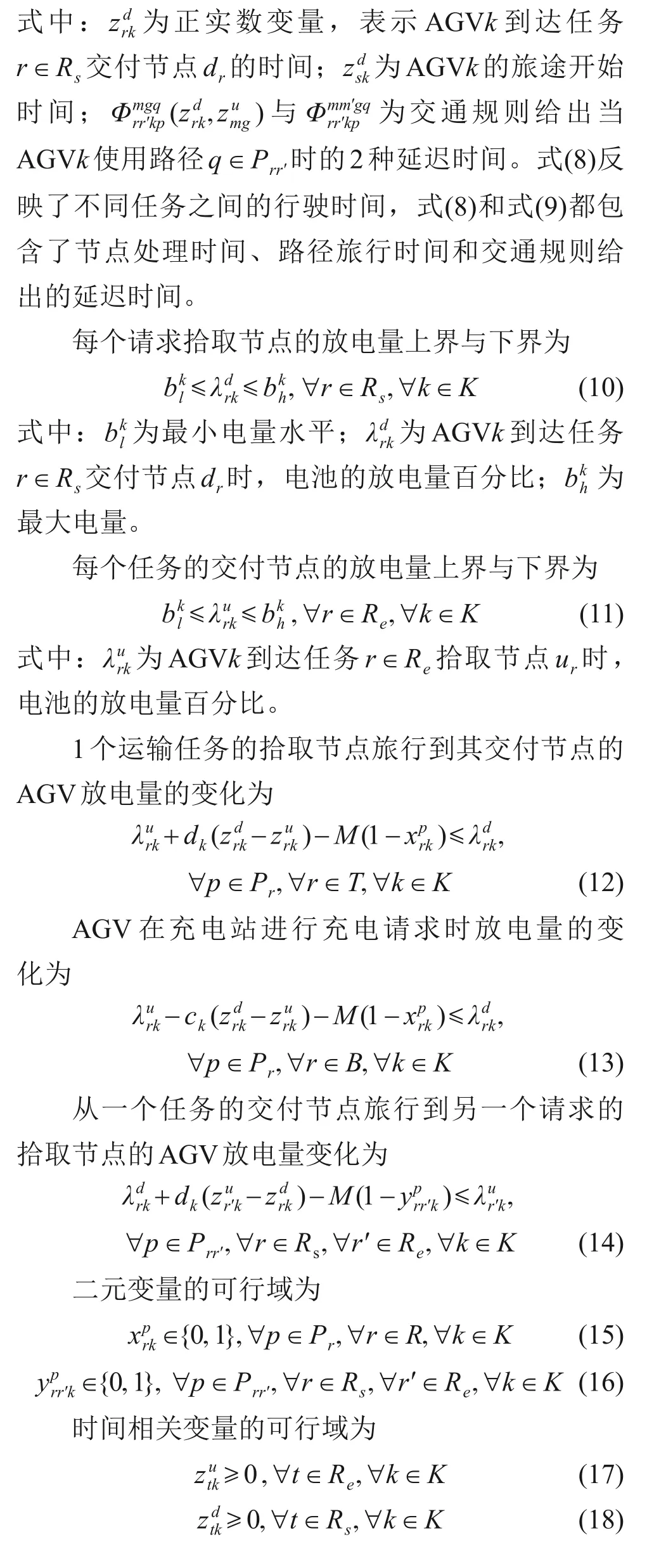
1 調(diào)度模型
2 基于分層規(guī)劃的綜合調(diào)度方法
本文提出一種基于分層規(guī)劃的綜合優(yōu)化調(diào)度方法,將調(diào)度問題分解為聚合的上層主問題和下層子問題。上層問題決定AGV 任務(wù)定序分配決策,下層子問題計算執(zhí)行任務(wù)的最優(yōu)路徑,同時,在2層問題的計算過程中考慮碰撞沖突問題。綜合優(yōu)化調(diào)度方法首先在不考慮沖突的情況下生成上層問題的精英解集合;然后,依次對集合中的每個精英解在下層進(jìn)行基于路徑專家?guī)斓穆窂揭?guī)劃計算,計算碰撞沖突并生成禁忌列表;最后,將禁忌列表作為碰撞沖突的約束條件融入上層問題的尋優(yōu)過程中,通過迭代搜索得到滿足整體性能最優(yōu)的調(diào)度方案。
AGV可以通過硬件和“交通規(guī)則”避免碰撞,因此,無沖突路徑不是強制性的,但規(guī)避沖突造成的延遲時間(避免碰撞的等待或繞道時間)需要被量化,同時,在上層問題和下層問題求解過程中減少碰撞沖突,目標(biāo)是最小化AGV 運輸時間,即最小化所有AGV執(zhí)行任務(wù)時間和延遲時間(避免碰撞的等待或繞道時間)的總和。此外,為了避免死鎖,不允許2 輛以上AGV 在同一位置發(fā)生沖突,存在這種情況的調(diào)度方案在計算過程中會被定義為不可行解。綜合優(yōu)化調(diào)度方法執(zhí)行步驟如下。
步驟1:在上層主問題中去除碰撞約束條件,定義AGV 每個任務(wù)的運輸時間為從起始節(jié)點到交付節(jié)點的最短時間,計算任務(wù)定序分配最優(yōu)解,并將最優(yōu)解和計算過程中其他精英解放入1個集合φi中。φi中的每個解用pn表示,其中,pn在集合φi中按照目標(biāo)函數(shù)值升序排列。
步驟2:在下層問題中,對于φi中每一個解pn進(jìn)行沖突約束下的路徑規(guī)劃,同時生成一個帶有記憶的碰撞沖突約束列表,稱為禁忌列表。若路徑規(guī)劃可以找到無沖突路徑,則調(diào)度優(yōu)化結(jié)束;否則,將碰撞沖突結(jié)果記錄到禁忌列表中。在每一個pn計算碰撞沖突過程中,將具有最小目標(biāo)函數(shù)值的解記為暫定最優(yōu)解pt,其碰撞沖突造成的延遲時間用td表示。
步驟3:定義最大允許延遲時間為ε,若步驟2中推導(dǎo)的td小于ε,則調(diào)度優(yōu)化完成。
步驟4:重新求解上層主問題,在這過程中從φi中去除被記錄在禁忌列表中的解。若k次迭代后目標(biāo)函數(shù)值沒有降低,則調(diào)度優(yōu)化結(jié)束。否則,更新精英集合φi并跳轉(zhuǎn)到步驟2。
本文提出一種引入路徑搜索和禁忌列表的混合狀態(tài)轉(zhuǎn)移算法(HDSTA)對任務(wù)定序分配、路徑規(guī)劃和碰撞沖突問題進(jìn)行一體化求解,算法流程如圖1所示。首先,在考慮當(dāng)前禁忌列表下,針對任務(wù)定序分配問題求解出候選精英解并添加到精英解集中,再依次對新生成的精英解執(zhí)行基于路徑專家?guī)斓穆窂揭?guī)劃計算。然后,通過碰撞檢測程序確定沖突延遲時間并獲得最終的任務(wù)完成時間。最后,更新禁忌列表,并將其作為沖突判斷指導(dǎo)求解下一代候選精英解。
混合離散狀態(tài)轉(zhuǎn)移算法流程如圖1 所示,其中,Xbest代表當(dāng)前最優(yōu)解,fbest表示歷史最優(yōu)解,SE為種群數(shù)量,n,ma,mb和mc為0到1之間的小數(shù)。HDSTA 的偽代碼見算法1。算法開始于由不考慮沖突的DSTA(I)算法生成上層初始精英解集Q0,對于其中每一個解pn,通過路徑選擇程序(SP)生成下層路徑解p,計算運輸時間T、延遲時間tp和沖突次數(shù),并生成禁忌列表Tlist。HDSTA設(shè)計了3個終止條件:
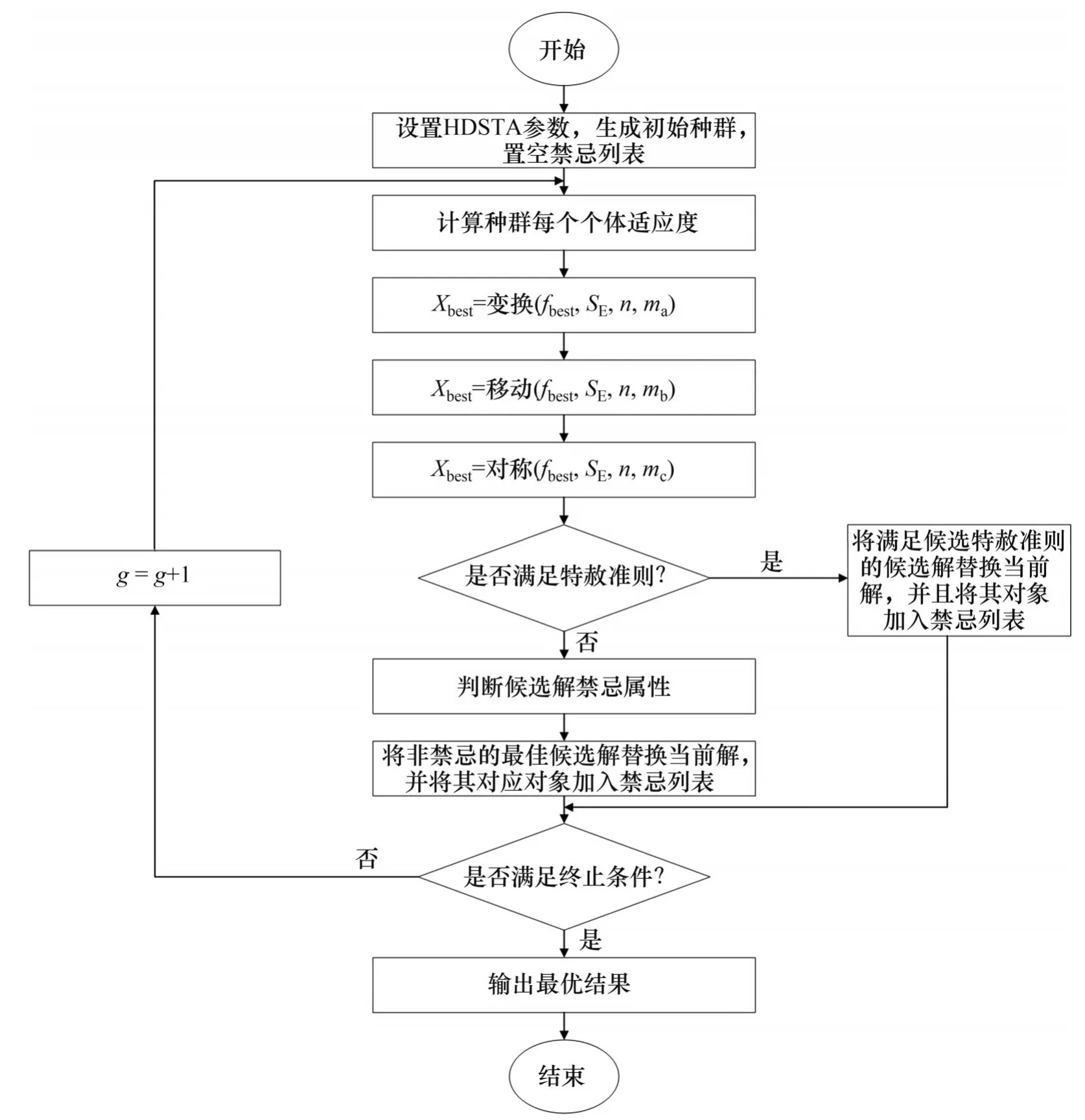
圖1 混合離散狀態(tài)轉(zhuǎn)移算法流程Fig. 1 Flow chart of hybrid discrete state transition algorithm
1) 精英解集中存在1個解,在路徑規(guī)劃中可以生成無沖突路徑,算法結(jié)束,輸出最優(yōu)解;
2) 精英解集在路徑規(guī)劃中的最優(yōu)解,其延遲時間tbest小于目標(biāo)值ε,算法結(jié)束,輸出最優(yōu)解;
3) 迭代l次后目標(biāo)函數(shù)值沒有減少,算法結(jié)束,輸出當(dāng)前最優(yōu)解。精英解集通過融合禁忌列表約束的DSTA(II)迭代過程進(jìn)行更新,直到其中一個終止條件被滿足,生成包含定序分配解D和執(zhí)行路徑解Pbest的綜合調(diào)度解S。
2.1 生成精英解集
在搬運任務(wù)序列中插入定位充電請求對AGV調(diào)度問題至關(guān)重要。當(dāng)AGV 當(dāng)前電量無法完成所有被分配的任務(wù)時,必須在中途充電,此時,需要在搬運任務(wù)序列中合理的位置插入充電請求,并規(guī)定AGV 在距離先前服務(wù)任務(wù)位置最近的充電站進(jìn)行充電[18]。針對AGV 可能需要多次充電問題,定義AGV 完成所有搬運任務(wù)需要的充電次數(shù)為Nk,設(shè)計臨界插入算子和非臨界插入算子。當(dāng)決定了1 個搬運任務(wù)定序分配解時,對Nk>1 的AGV 用臨界插入算子插入充電請求,對Nk=1 的AGV用非臨界插入算子插入充電請求。
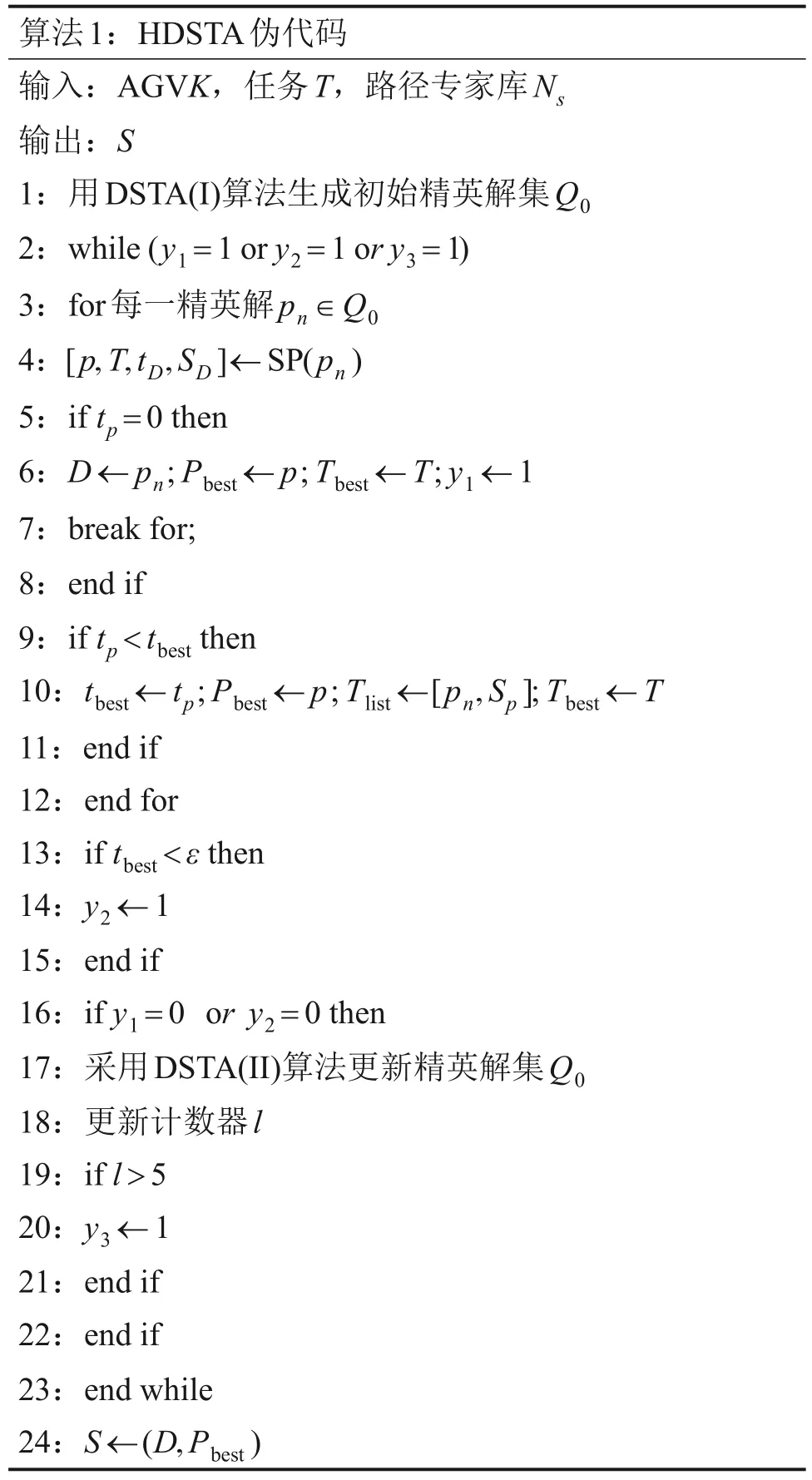
算法1:HDSTA偽代碼輸入:AGVK,任務(wù)T,路徑專家?guī)霳s輸出:S 1:用DSTA(I)算法生成初始精英解集Q0 2:while (y1=1 or y2=1 or y3=1)3:for每一精英解pn ∈Q0 4:[p,T,tD,SD]←SP(pn)5:if tp=0 then 6:D ←pn;Pbest ←p;Tbest ←T;y1 ←1 7:break for;8:end if 9:if tp <tbest then 10:tbest ←tp;Pbest ←p;Tlist ←[pn,Sp];Tbest ←T 11:end if 12:end for 13:if tbest <ε then 14:y2 ←1 15:end if 16:if y1=0 or y2=0 then 17:采用DSTA(II)算法更新精英解集Q0 18:更新計數(shù)器l 19:if l >5 20:y3 ←1 21:end if 22:end if 23:end while 24:S ←(D,Pbest)
臨界插入算子(CI):按順序確定AGV 電量低于臨界閾值bl的任務(wù)位置,并在該任務(wù)前插入充電請求。
非臨界插入算子(NCI):按順序確定AGV電量低于臨界閾值bl的任務(wù)位置。在該任務(wù)前找到離充電站最近且不會增加充電次數(shù)的位置,將充電請求插入該最佳位置,使AGV提前充電。
DSTA采用群體中的最優(yōu)解在鄰域內(nèi)迭代搜索直到找到全局最優(yōu)解。為了保證任務(wù)定序分配結(jié)果對路徑規(guī)劃過程具有多樣選擇性,需要生成包含多個精英解的集合。在DSTA迭代過程中,下一代種群的生成只與上一代的最優(yōu)解相關(guān),用于生成種群的3 種特殊狀態(tài)變換算子見文獻(xiàn)[19]。每一代種群中的解具有高度相似性,其包含的解不滿足精英性和多樣性要求,因此,不能作為精英解集。針對上述問題提出一種精英解集Q0生成方法。初始化解集Q0并定義集合中解的數(shù)量上限為m,按照目標(biāo)函數(shù)值升序存放。在迭代過程中,將每一代搜索的所有精英解與Q0中存放的解進(jìn)行比較,若存在更優(yōu)的解則進(jìn)行替換,從而保證精英解集Q0包含搜索過程中所有精英個體。引入插入算子的精英解集生成方法見算法2,其中,Se為種群數(shù)量,Sbest為種群中最優(yōu)解,Q0為精英解集,Ci與Ni分別為臨界插入算子和非臨界插入算子。

算法2:DSTA(II)輸入:AGVK,任務(wù)T輸出:Q0 1:隨機生成初始化解Best 2:fbest ←fitness(Sbest)3:k ←0 4:repeat 5:[Q0,fbest,Sbest]←swap(Q0,fbest,Sbest,Tlist,Se,Ci,Ni)6:[Q0,fbest,Sbest]←shift(Q0,fbest,Sbest,Tlist,Se,Ci,Ni)7:[Q0,fbest,Sbest]←symmetry(Q0,fbest,Sbest,Tlist,Se,Ci,Ni)8:k ←k+1 9:until達(dá)到最大迭代次數(shù)
2.2 路徑選擇
基于路徑專家數(shù)據(jù)庫的AGV 路徑選擇程序SP,其偽代碼見算法3。路徑選擇過程根據(jù)當(dāng)前任務(wù)定序分配方案,從路徑專家數(shù)據(jù)庫中找到?jīng)_突最少的執(zhí)行路徑Pbest,計算延遲時間tp并記錄沖突信息生成禁忌列表Tlist。為了求解路徑規(guī)劃方案P,定義dk為AGVk被分配的所有搬運任務(wù),其執(zhí)行路徑由rk表示。每個任務(wù)搬運任務(wù)tn∈dk由1 個取貨請求和1 個送貨請求組成,代表執(zhí)行任務(wù)tn的路徑,其中,分別表示取貨路徑和送貨路徑。此外,當(dāng)任務(wù)為充電請求時,則只有1 條路徑。在路徑專家?guī)熘校瑥恼军ci到站點j的路線rij中第n條路徑用p(i,j,n)∈Ns表示。
在選擇程序中,沖突檢測程序(Con)是一個基于三維時空模型的沖突檢測程序[20],它能計算沖突路徑位置Sp與延時時間ti。當(dāng)路徑之間存在沖突時,替換程序(Replace)在路徑專家數(shù)據(jù)庫中用其他平行路徑替換當(dāng)前路徑,替代方式是從路徑候選解集中自上而下搜索,直到為每個AGV 從路徑庫中找到延遲時間最少的路徑。在找到無沖突執(zhí)行路徑后停止搜索,否則,替換程序?qū)⑺阉髀窂綄<規(guī)熘袥_突路線的替換路徑,選擇延遲時間最小的路徑集合記為當(dāng)前最優(yōu)路徑解Pbest。
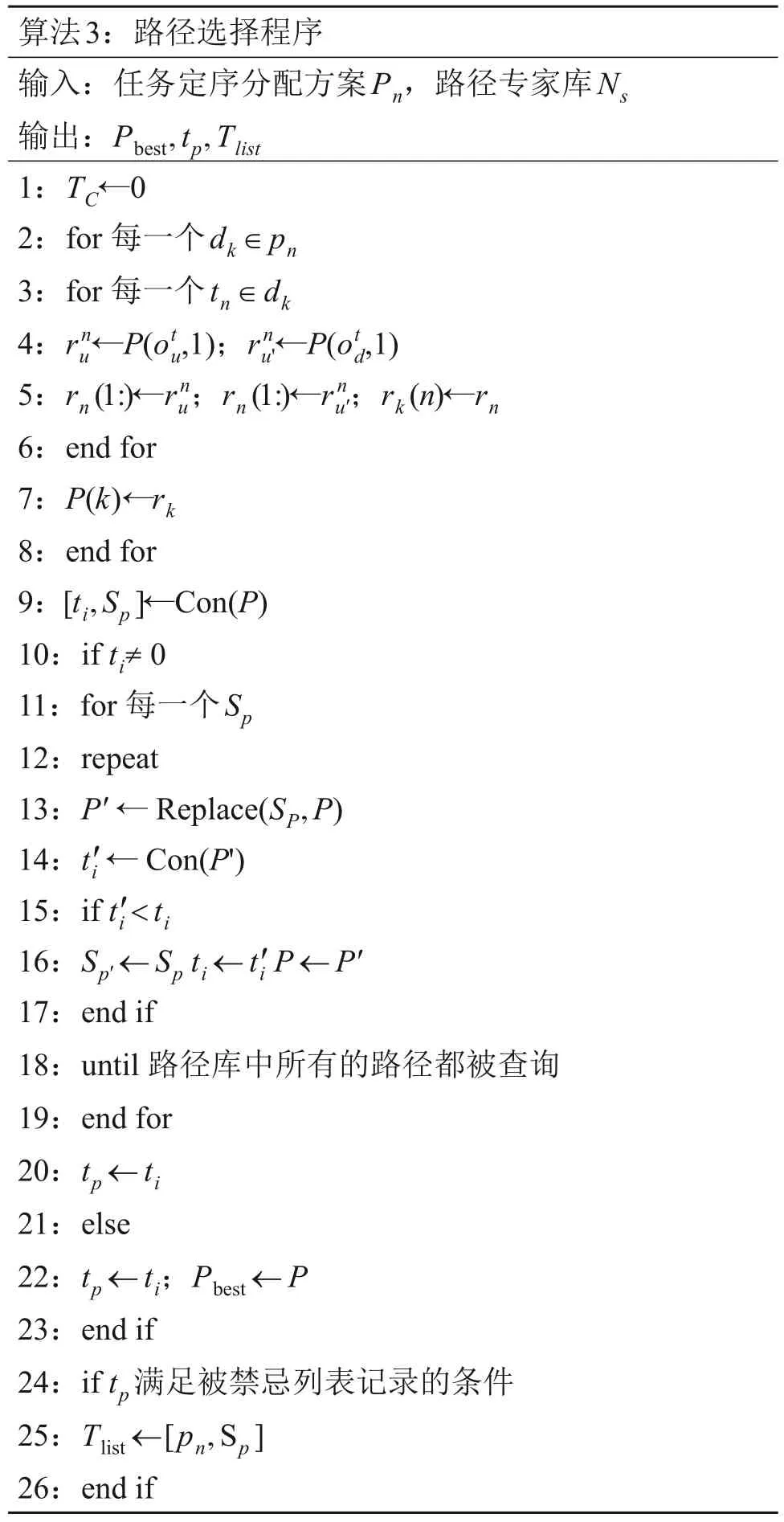
算法3:路徑選擇程序輸入:任務(wù)定序分配方案Pn,路徑專家?guī)霳s輸出:Pbest,tp,Tlist 1:TC←0 2:for 每一個dk ∈pn 3:for 每一個tn ∈dk 4:rnu←P(ot u,1);rnu'←P(otd,1)5:rn(1:)←rnu;rn(1:)←rnu′;rk(n)←rn 6:end for 7:P(k)←rk 8:end for 9:[ti,Sp]←Con(P)10:if ti≠ 0 11:for 每一個Sp 12:repeat 13:P′ ← Replace(SP,P)14:t′i ← Con(P')15:if t′i <ti 16:Sp′←Sp ti ←t′i P ←P′17:end if 18:until 路徑庫中所有的路徑都被查詢19:end for 20:tp ←ti 21:else 22:tp ←ti;Pbest ←P 23:end if 24:if tp滿足被禁忌列表記錄的條件25:Tlist ←[pn,Sp]26:end if
禁忌列表在HDSTA 中的作用是從搜索空間移除曾經(jīng)訪問的解,從而進(jìn)行更廣泛探索。在路徑選擇中,禁忌列表記錄并更新存在沖突較多的任務(wù)定序分配精英解。HDSTA 在迭代過程中更新精英解集時受到禁忌列表約束,并刪除被記錄的解,從而防止循環(huán)回到之前搜索過的解決方案。禁忌列表能存儲解的數(shù)量上限為h,當(dāng)新的解延遲時間更大時,禁忌列表才會更新。需要強調(diào)的是,本文考慮的沖突問題具有時序性,優(yōu)先被執(zhí)行的任務(wù)不受靠后被執(zhí)行任務(wù)的影響,禁忌列表中記錄的信息對于任務(wù)分配結(jié)果的約束可以被擴(kuò)展,如當(dāng)AGV1被分配執(zhí)行任務(wù)(2-1-3-5)且AGV2被分配行任務(wù)(8-7-6-4)時,若記錄AGV1在執(zhí)行任務(wù)1 會與執(zhí)行任務(wù)7 的AGV2發(fā)生沖突,則沖突信息可以被擴(kuò)展為AGV1(2-1-X-X)與AGV2(8-7-X-X),其中,X表示任意一個任務(wù)。
3 工業(yè)倉庫實例驗證
3.1 工業(yè)倉庫案例
湖南長沙的某科技公司是本項研究的合作單位和實驗應(yīng)用場所,某倉庫的布局如圖2所示,包括40個預(yù)分揀站和9個充電站。采用1個包含背負(fù)式AGV和托盤式AGV的異構(gòu)車隊集群,2種AGV的速度分別為0.8 m/s 和1.0 m/s。根據(jù)從業(yè)者反饋,在1 個時間段內(nèi),等待分配的平均任務(wù)數(shù)約為50個,繁忙期,等待分配的任務(wù)超過80個。
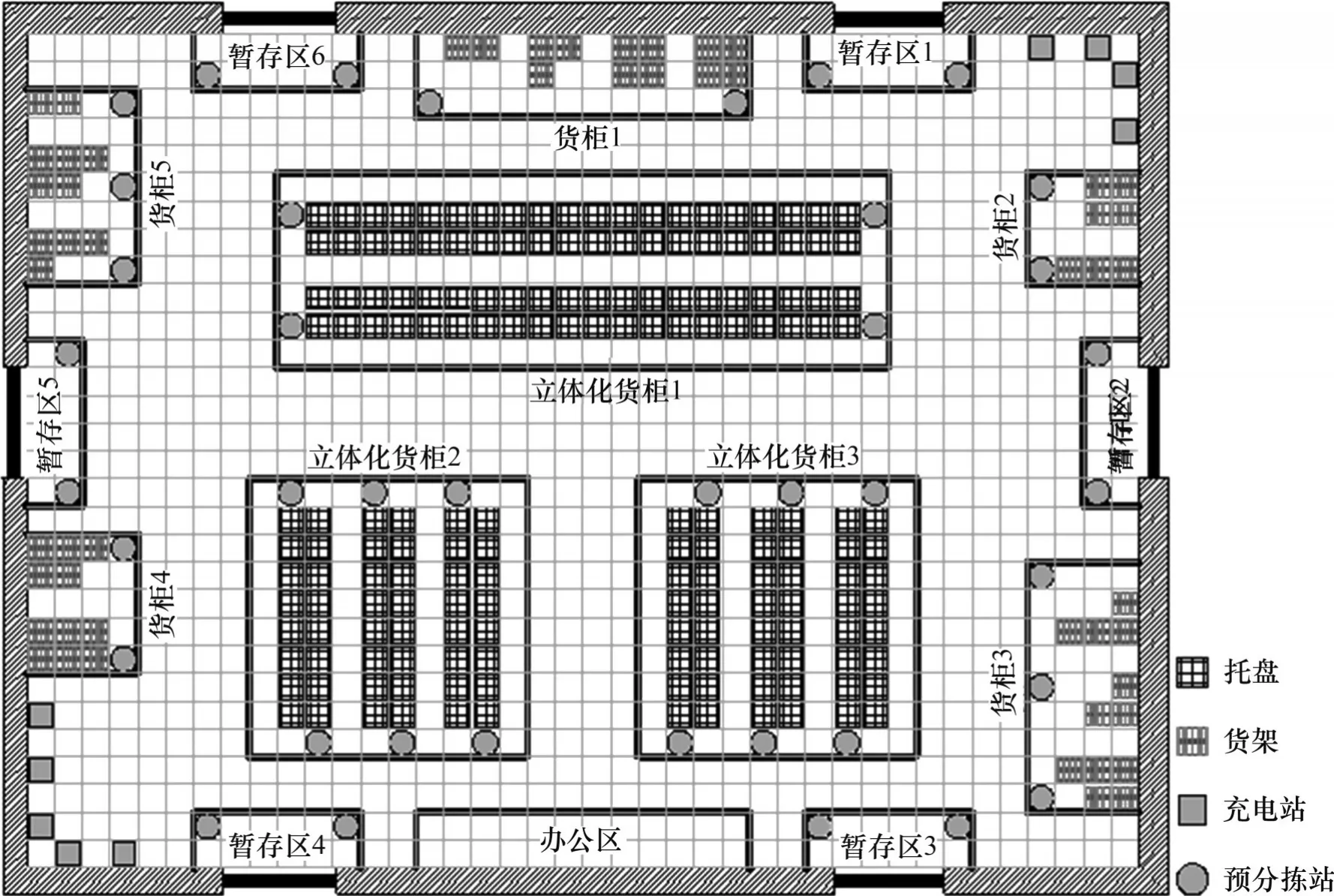
圖2 倉儲布局Fig. 2 Warehouse layout
3.1.1 參數(shù)設(shè)定
在實驗案例中對參數(shù)進(jìn)行設(shè)定,首先確定種群數(shù)量、精英解集中解的數(shù)量和禁忌列表長度的上限分別為S e=20,m=30,h=120。然后,確定算法的終止條件參數(shù),允許的最大延遲時間ε=85 s,HDSTA 迭代計數(shù)值為5 次,DSTA 最大迭代計數(shù)值為50次。路徑專家?guī)霳s在離線階段被提前預(yù)設(shè),每一條站點之間的路線都包含10 條以上優(yōu)秀的候選路徑。
3.1.2 案例分析
基于實際倉庫案例的背景,通過處理不同規(guī)模的問題驗證方法的有效性。在實驗中,待調(diào)度的AGV數(shù)量分別6、9和15輛,案例中待分配的任務(wù)數(shù)分別為20、30、40、50、60、70 和80 個,每一個案例隨機生成5 組任務(wù),并運行10 次,共運行50 次程序,取平均值作為結(jié)果。當(dāng)前工業(yè)倉庫中先進(jìn)AGV 系統(tǒng)普遍采用依次優(yōu)化的調(diào)度方法,其中LIAN 等[14]提出的方法最具有代表性,因此,在現(xiàn)實倉庫案例分析中選擇該方法進(jìn)行對比驗證。在案例分析中,綜合優(yōu)化調(diào)度方法和依次優(yōu)化調(diào)度方法的任務(wù)完成時間和延遲時間的對比結(jié)果如圖3至圖5所示。
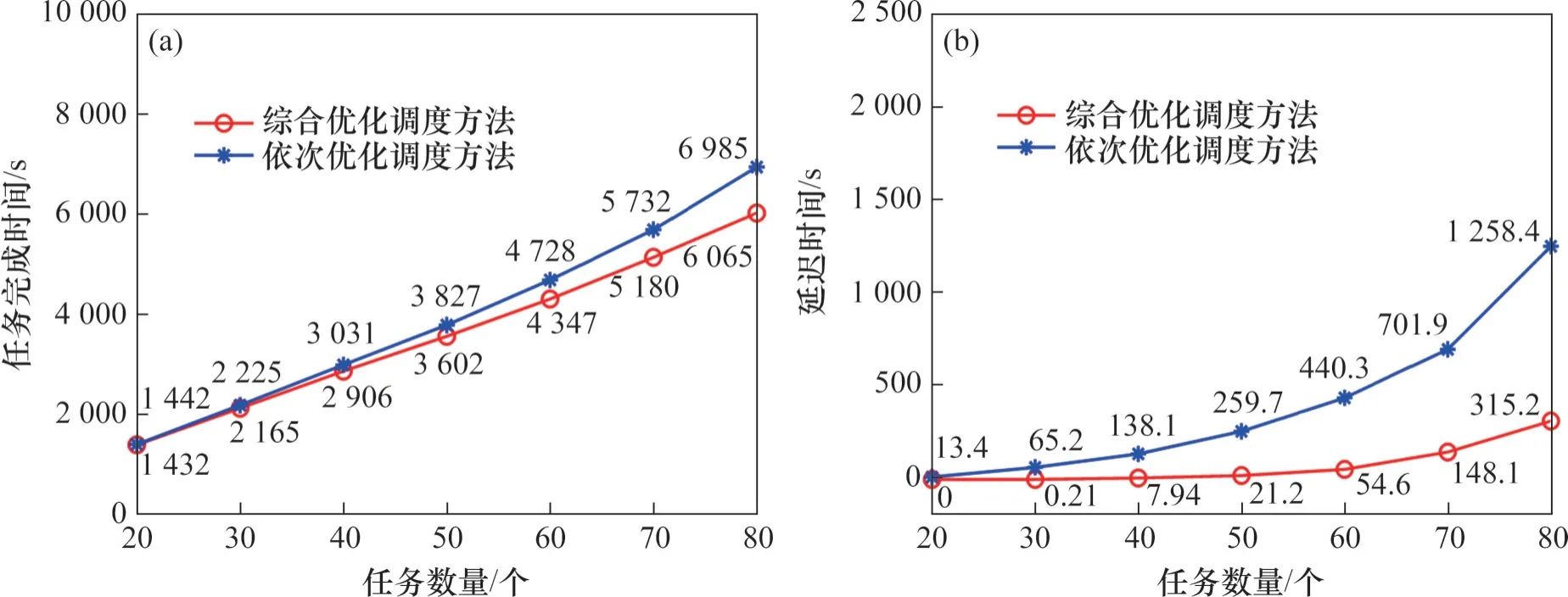
圖3 使用6輛AGV的任務(wù)完成時間和延遲時間對比分析Fig. 3 Comparative analysis of task completion time and delay time with 6 AGVs
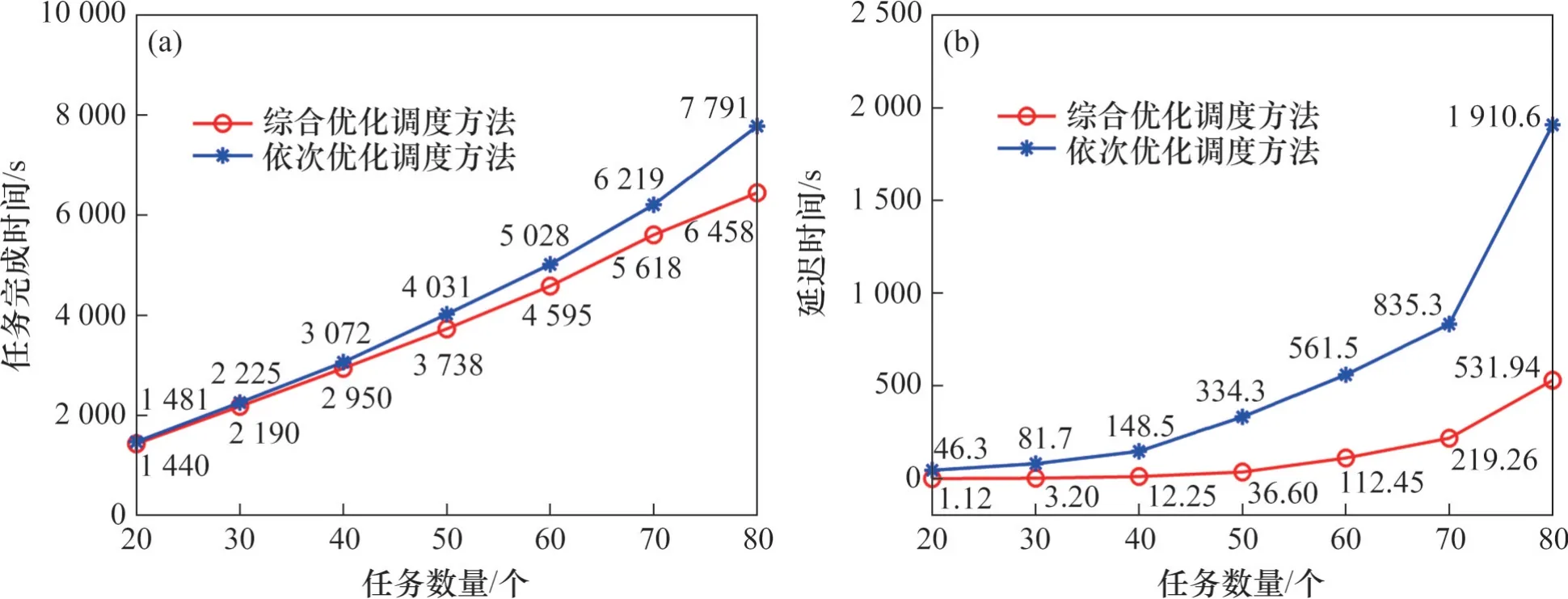
圖4 使用9輛AGV的任務(wù)完成時間和延遲時間對比分析Fig. 4 Comparative analysis of task completion time and delay time with 9 AGVs
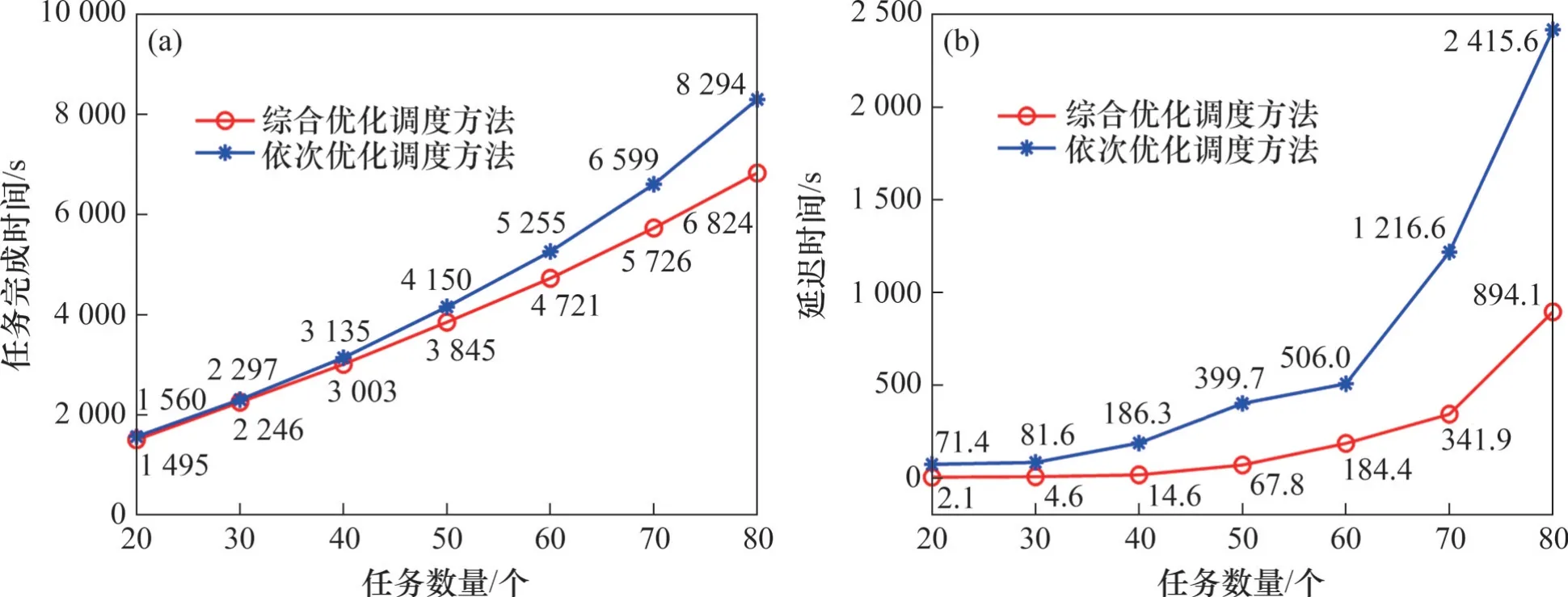
圖5 使用15輛AGV的任務(wù)完成時間和延遲時間對比分析Fig. 5 Comparative analysis of task completion time and delay time with 15 AGVs
案例分析結(jié)果表明,本文所提出的綜合優(yōu)化調(diào)度方法具有更好的性能,在所有案例中都找到了更優(yōu)的解。具體表現(xiàn)為:相較于依次優(yōu)化調(diào)度方法,綜合優(yōu)化調(diào)度方法的任務(wù)完成時間縮短了10.56%,延遲時間減少了74.53%。值得注意的是,這2 種方法的延遲時間在任務(wù)數(shù)為20 時任務(wù)完成時間僅相差42.63 s,但當(dāng)任務(wù)數(shù)增大到80 個時,其任務(wù)完成時間相差1 281.13 s。因此,隨著任務(wù)規(guī)模增加,AGV 之間發(fā)生沖突的可能性也越大,依次優(yōu)化調(diào)度方法不能從任務(wù)分配過程中規(guī)避碰撞沖突的影響,而綜合優(yōu)化調(diào)度方法可以通過改變?nèi)蝿?wù)分配和具體執(zhí)行路徑,規(guī)避大多數(shù)沖突情況。
為了進(jìn)一步驗證綜合優(yōu)化調(diào)度方法在大規(guī)模任務(wù)案例中減少碰撞沖突的作用,使用30輛AGV將2種方法在任務(wù)數(shù)分別為110~150個的案例中對碰撞沖突次數(shù)進(jìn)行對比。每一個案例隨機生成10組任務(wù),每組運行10次程序取平均值,結(jié)果如圖6所示。從圖6可以得到:綜合優(yōu)化調(diào)度方法能大幅度減少AGV 之間的碰撞次數(shù),與依次優(yōu)化調(diào)度方法相比,平均碰撞次數(shù)降低73.3%。
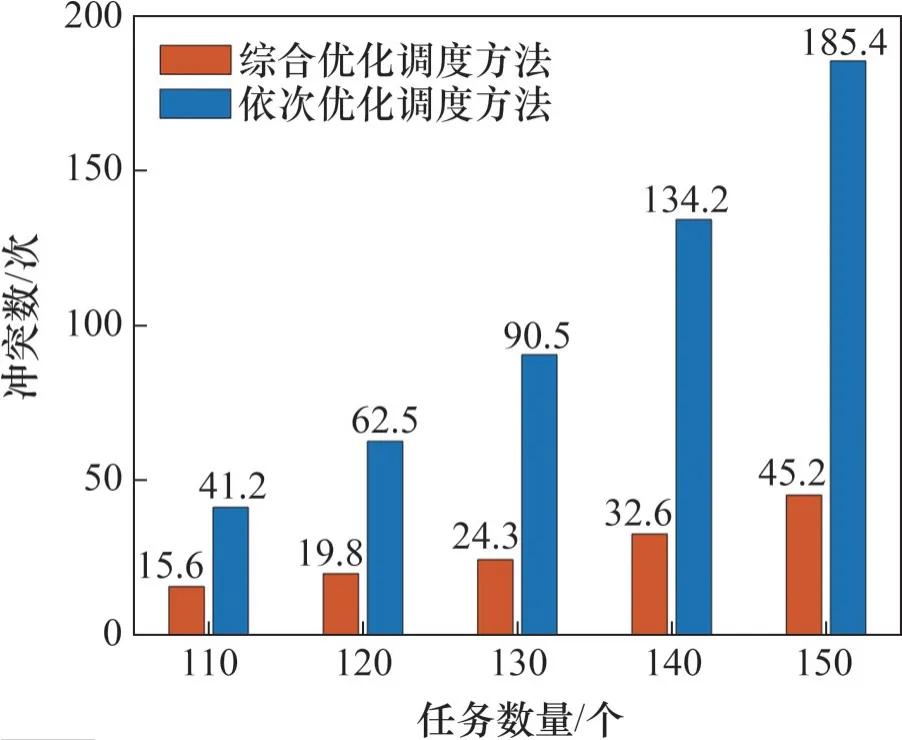
圖6 平均碰撞次數(shù)對比分析Fig. 6 Analysis of conflicts number
3.2 對比驗證分析
為了更全面地驗證HDSTA 的性能,需要建立更大規(guī)模的案例范本。將20~100 個任務(wù)定義為小規(guī)模問題,待調(diào)度的AGV 從5 輛到15 輛不等;將100個任務(wù)以上定義為大規(guī)模問題,待調(diào)度的AGV從15輛到30輛不等。在對比實驗中,對于不同規(guī)模的每個案例隨機生成10 組任務(wù),每組運行10次,共運行100次程序,對比任務(wù)完成的時間。在每個案例中,將HDSTA與自適應(yīng)大鄰域搜索算法(HALNS)[15]、預(yù)先規(guī)劃算法(PPA)[13]和DS算法進(jìn)行對比。其中,HALNS 是一種混合了自適應(yīng)大鄰域搜索算法和線性規(guī)劃的算法,用于求解帶電量約束的異構(gòu)AGV 調(diào)度問題。但該方法沒有考慮沖突和死鎖問題,為了進(jìn)行比較,對其最優(yōu)解進(jìn)行沖突檢測并增加延遲時間。PPA是一種在路徑規(guī)劃過程生成無沖突最短路徑的算法,本文將綜合調(diào)度優(yōu)化方法與無沖突路徑策略進(jìn)行比較。DS 是基于離散狀態(tài)轉(zhuǎn)移算法的綜合求解方法,用于與本文提出的基于HDSTA的綜合求解方法作對比。算法的計算時間同樣是重要的性能指標(biāo),因此,設(shè)定算法最大計算時間為120 s,對比結(jié)果如表1和表2所示。

表1 小規(guī)模案例對比分析Table 1 Results for the small-scale instances
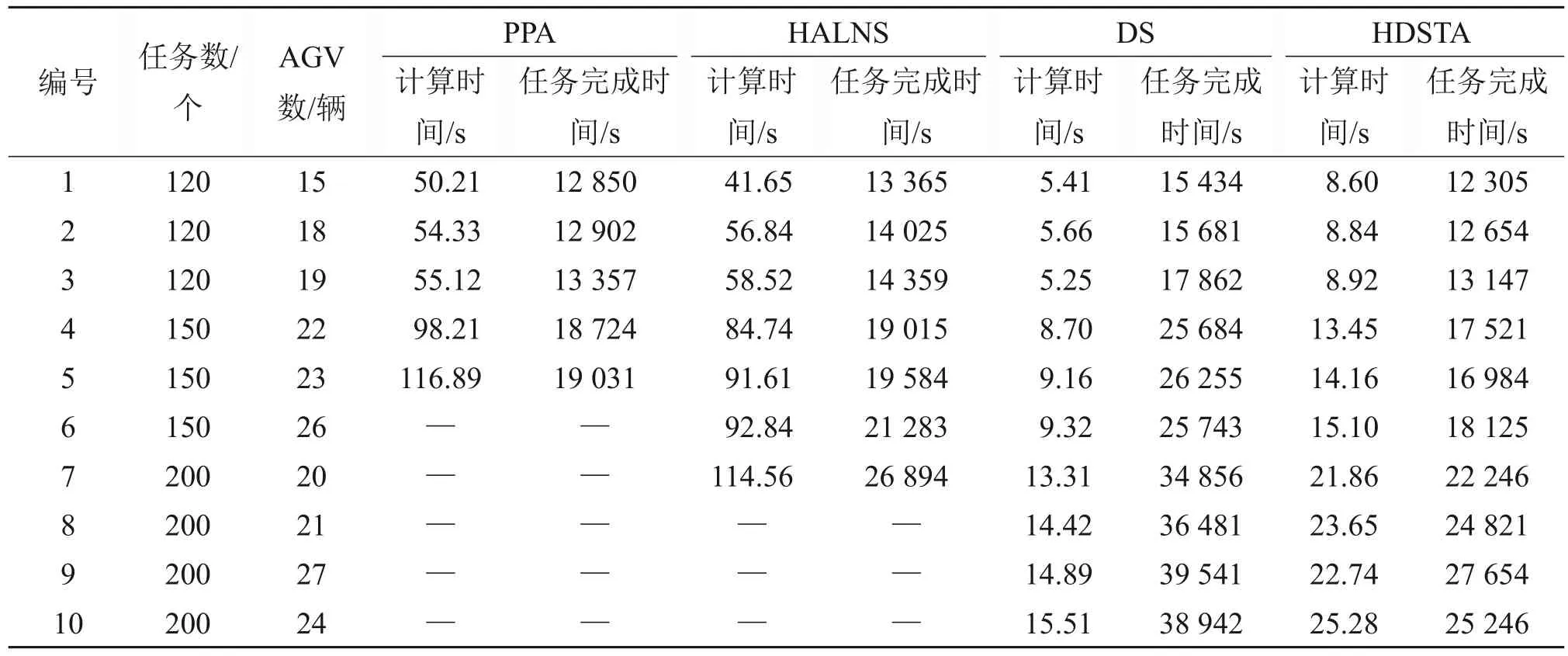
表2 大規(guī)模案例對比分析Table 2 Results for the large-scale instances
任務(wù)完成時間與運行成本成正比,可以直觀反映AGV 協(xié)同運行效率,而計算時間是動態(tài)調(diào)度的重要指標(biāo),可以反映AGV系統(tǒng)的計算效率。從表1可見:當(dāng)任務(wù)數(shù)量為20個,AGV數(shù)量分別為5,8和10輛時,采用HDSTA算法優(yōu)化調(diào)度計算得出的方案任務(wù)完成時間分別為1 440、1 453 和1 485 s,計算時間分別為0.83、0.82 和0.89 s;通過20 個小規(guī)模案例類型的200組任務(wù)的結(jié)果分析發(fā)現(xiàn),相較于PPA 和HALNS,本文提出的HDSTA 解的任務(wù)完成時間平均值分別縮短0.48%和1.16%,計算時間分別降低78.40%和69.74%。DS 求解時間與其他3 種綜合調(diào)度方法相差較大;在小規(guī)模問題中,幾種綜合調(diào)度方法求解時間相差不大,而HDSTA的求解時間更少。從表2 可見:當(dāng)任務(wù)數(shù)量為120個,AGV 數(shù)量分別為15、18 和19 輛時,采用HDSTA 算法優(yōu)化調(diào)度計算后任務(wù)完成時間分別為12 305、12 654 和13 147 s,計算時間分別為8.60、8.84 和8.92 s;通過10 個大規(guī)模案例類型的100 組任務(wù)的結(jié)果分析發(fā)現(xiàn),與PPA 和HALNS 相比,HDSTA 可以在更短的時間內(nèi)求得質(zhì)量更高的解,任務(wù)完成時間分別縮短5.54%和9.73%,計算時間分別降低86.68%和84.19%。在大部分案例中,DS不能得到整體最優(yōu)的結(jié)果,HDSTA 雖然計算時間比DS的更長,但仍在一個合理的范圍內(nèi)。
4 結(jié)論
1) 本文提出的基于分層規(guī)劃的綜合優(yōu)化調(diào)度方法比依次優(yōu)化調(diào)度方法平均任務(wù)完成時間減少10.56%,碰撞沖突造成的延遲時間減少74.53%。
2) 在所有案例中,DS 都不能得到整體最優(yōu)的結(jié)果。在100個任務(wù)內(nèi)的小規(guī)模問題中,本文提出的方法比HALNS 和PPA 任務(wù)完成時間分別減少1.16% 和0.48%,計算時間分別減少69.74% 和78.40%。在100個任務(wù)以上的大規(guī)模問題中,本文提出的方法比HALNS和PPA任務(wù)完成時間分別減少9.73%和5.54%,計算時間分別減少84.19%和86.68%。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56