基于無人機-衛星遙感升尺度的土壤水分監測模型研究
2023-06-20 04:51:56黃組桂賈江棟羅林育姚一飛
農業機械學報 2023年6期
馬 儀 黃組桂 賈江棟 羅林育 王 爽 姚一飛
(1.云南電網有限責任公司電力科學研究院, 昆明 650217;2.西北農林科技大學水利與建筑工程學院, 陜西楊凌 712100;3.西北農林科技大學旱區農業水土工程教育部重點實驗室, 陜西楊凌 712100)
0 引言
我國西北內陸干旱半干旱區域一直存在明顯的水資源短缺問題,發展缺水地區地表土壤水分快速、合理、高精度的監測,對于指導農業生產建設、荒漠植被恢復以及灌溉制度制定有著重要的作用和意義。傳統的土壤水分含量測量方法大多針對地面采樣點進行研究,雖然精度較高,但該方法不僅測量的范圍有限,取樣的代表性較差,更需耗費大量的人力、物力和財力,同時也無法實現大范圍、高效率的測量效果[1]。而遙感因其具有無損、便捷快速、可進行大范圍監測等優勢,逐漸開始應用于地表土壤水分的監測研究。早在20世紀70年代,美歐等國家便開始利用衛星遙感進行土壤水分的監測研究[2]。雖然取得了不少進展,但受限于平臺,往往難以獲得大尺度范圍和高精度兩者兼具的監測結果。無人機(Unmanned aerial vehicle,UAV)是一種能攜帶多種任務設備,兼具低成本、低損耗、可重復使用等優點的無人駕駛航空器[3],當在該航空器上裝載多光譜或高光譜傳感器時便可以快速、較低成本、便捷靈活地獲取高精度的農田作物信息,以滿足精準農業的相關需求[4],但作用的尺度范圍較小。一般而言,單獨利用衛星或無人機遙感無法實現高精度且大尺度范圍的土壤水分監測,因此有必要發展合理的尺度轉換方法將二者的優勢結合,以快速實現大尺度范圍上高精度的地表地物信息監測。在遙感領域,尺度轉換就是將數據或信息從一個尺度變換到另一個尺度的過程,將從高分辨率到低分辨率的尺度轉換稱為升尺度,反之則稱為降尺度[5]。采用尺度轉換方法將多源遙感數據相結合以監測地表土壤水分和鹽分的可行性已被諸多學者驗證。如馮文哲等[6]分別利用衛星和無人機獲取遙感影像數據,引入多種機器學習算法構建土壤鹽漬化監測模型,并使用升尺度轉換方法,較大幅度地提高了衛星遙感對土壤鹽漬化的監測精度。岳朝政[7]提出了基于變分貝葉斯推斷和非參數貝葉斯的土壤水分空間升尺度法。陳俊英等[8]以衛星和無人機兩種不同遙感為數據源,采用改進的TsHARP法進行線性回歸函數趨勢面的構造以構建土壤鹽漬化監測模型,提高了衛星遙感對土壤鹽漬化的監測精度。張智韜等[9]基于加權算法將無人機數據尺度上推以修正衛星遙感數據,有效提高了土壤含鹽量監測精度。土壤中的水分和鹽分常常相互伴隨交互、聯系緊密[10],如柯增鳴[11]發現在0~20 cm和20~40 cm土層的土壤水分與土壤鹽分在土壤相對含水率為52%~75%下具有較高的相關性,張術偉等[12]在探究黃河三角洲壤土水鹽變化時發現,在升鹽過程中,土壤表層水鹽呈現正向線性關系,此外土壤中的水分和鹽分在光譜吸收帶的范圍有著較大的重合[10],理論上可以采取尺度轉換手段將多源遙感數據相結合的方式,應用于土壤水分的監測研究。然而,目前在協同多源遙感數據以開展升尺度的土壤水分監測方面的相關研究仍較少。基于此,本研究以內蒙古河套灌區為研究對象,分別采用重采樣和TsHARP升尺度法,將無人機遙感數據尺度上推以修正衛星數據,通過引入不同算法構建升尺度修正后GF-1衛星遙感數據源下不同深度的土壤含水率反演模型,以期實現大尺度、高精度的土壤水分反演,為干旱、半干旱地區的土壤含水率監測提供技術依據。
1 材料與方法
1.1 研究區概況
選取內蒙古河套灌區解放閘灌域沙壕渠試驗站為研究區。河套灌區位于我國黃河流域上游,平均海拔1 km以上,是我國第三大灌區[13]。解放閘灌域處于河套灌區西部,屬干旱半干旱區[14]。而沙壕渠是解放閘灌域的一個獨立體,位于內蒙古自治區巴彥淖爾市杭錦后旗,其土壤類型大多為粉質粘壤土,平均干容重約為1.46 t/m3,年降水量不到200 mm,年蒸發量卻在2 000 mm以上,蒸降比超過10[15]。由于氣候、地形條件、土質因素及人為的不合理灌溉等因素,導致該地區的土壤鹽漬化問題較為突出。
本次試驗在沙壕渠內進行(圖1),在研究區內分散選取了4塊土地,進行了無人機飛行試驗,并均勻布置采樣點,同步采集土壤樣本,以計算土壤含水率。
1.2 遙感數據獲取與處理
1.2.1衛星遙感數據
衛星影像數據從中國資源衛星應用中心(http:∥www.cresda.com/CN/)下載獲取。本研究選用的衛星遙感影像成像時間為2019年7月30日,空間分辨率為16 m,包括b1、b2、b3、b4共4個波段,分別對應藍(B)、綠(G)、紅(R)和近紅外(NIR),譜段范圍分別為0.45~0.52 μm、0.52~0.59 μm、0.63~0.69 μm和0.77~0.89 μm。利用ENVI軟件對獲取的影像進行輻射定標、幾何精度校正、大氣校正、裁剪等預處理,之后將實測的120個采樣點坐標導入遙感影像,提取各波段的反射率,用于后續光譜指數計算及土壤含水率反演。
1.2.2無人機多光譜遙感數據
使用大疆創新科技有限公司生產的M600型六旋翼無人機獲取無人機遙感影像。多光譜傳感器型號為Micro-MCA,包括b1、b2、b3、b4、b5、b6共6個光譜波段,分別對應藍(B)、綠(G)、紅(R)、紅邊(NIR)、近紅外1(NIR1)以及近紅外2(NIR2),中心波長分別為490、550、680、720、800、900 nm。于2019年7月15—25日獲取無人機多光譜影像。飛行當天天氣晴朗,無人機按照定好的航線飛行,飛行高度為120 m,多光譜相機鏡頭垂直向下,此時影像所對應的地面分辨率約為0.065 m。使用多光譜相機配套的Pixel wrench圖像編輯軟件對獲取的無人機遙感影像進行校正、裁剪、拼接、合成等相關處理,導出tif格式的多光譜影像。最后將采樣點的經緯度導入ENVI軟件,提取影像中對應采樣點的灰度,通過參考白板進一步計算各波段反射率。
1.3 土壤樣本采集處理與含水率計算
土壤樣本的采樣時間與無人機影像獲取時間同步,與衛星遙感影像數據獲取時間相近。采用五點取樣法進行采樣,共布設120個土壤采樣點,采樣點深度分別為0~20 cm、20~40 cm和40~60 cm,并采用手持GPS定位,記錄采樣點的地理坐標。將野外采集到的各深度的120個土樣快速裝入已知質量的干燥鋁盒,密封并標記好后稱量,經105℃、24 h恒溫處理后稱量,計算土壤質量含水率θm,計算式為
(1)
式中W1——空鋁盒質量
W2——濕土加鋁盒質量
W3——干土加鋁盒質量
將因試驗記錄及計算錯誤所得土壤含水率為負值的數據剔除,最終剩余101個實測土壤樣本用于本次研究。將101個土壤含水率樣本從小到大排序,建模集與驗證集按照比例2∶1等間隔分配,以確保建模集與驗證集分布均勻。
1.4 光譜指數計算與全子集篩選
一般而言,僅用個別波段難以充分提取地物光譜信息以及構建高精度的土壤含水率反演模型,因此許多學者通過建立光譜指數以更好地反映地物信息。如曹雷等[16]研究發現,SI-T、S5等鹽分指數對土壤鹽漬化較為敏感,具有較好的預測能力;差值植被指數(Difference vegetation index,DVI)常被應用于光學遙感反演土壤水分[17]。結合前人研究經驗以及考慮到灌區較高植被覆蓋度和一定鹽漬化問題的實際情況,在GF-1衛星遙感數據的波段反射率基礎上,引入應用廣泛的植被指數和鹽分指數建立遙感圖像與土壤含水率的定量關系,分別為鹽分指數SI2、鹽分指數S3、鹽分指數S5、鹽分指數S6、鹽分指數SI-T、亮度指數(Brightness index,BI)、土壤調節植被指數(Soil adjusted vegetation index,SAVI2)、垂直干旱指數(Perpendicular drought index,PDI)、轉換型土壤調節植被指數(Transformed soil-adjusted vegetation index,TSAVI)、差值植被指數(DVI),相關計算公式見表1。
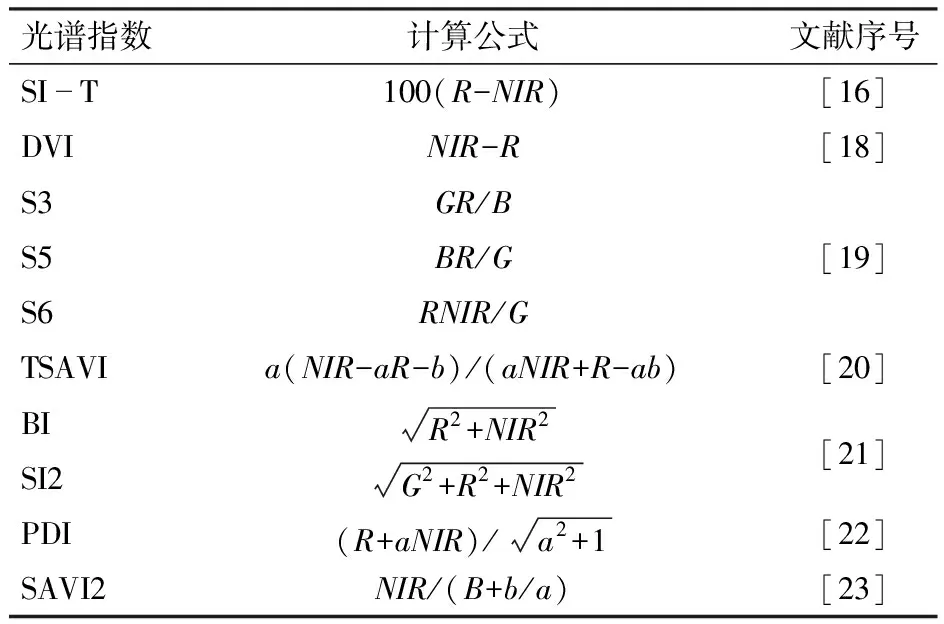
表1 光譜指數匯總Tab.1 Summary of spectral index
采用全子集篩選法篩選出自變量(敏感波段和光譜指數)的最優組合。該法假設有M個自變量,對M中的P個變量(1≤P≤M,P、M均為整數)分別與因變量做最小二乘擬合,擬合出1~P個預測變量模型;在1~P個模型中,根據調整后決定系數(Coefficient of determination,R2)最大原則,綜合考慮均方根誤差(Root mean squared error,RMSE)、赤池信息準則(Akaike information criterion,AIC)和施瓦茨信息準則(Schwarz information criterion,SIC),從P個模型中選出一個最優自變量組合。通過Matlab軟件完成全子集篩選算法模型的構建。
1.5 模型建立
1.5.1多元線性回歸模型
多元線性回歸(Multiple linear regression, MLR)是指在相關變量中,將一個變量視為因變量,其它一個或多個變量視為自變量,建立多個變量之間線性的數學模型數量關系式[24]。多元線性回歸是一元線性回歸的擴展,通常采用最小二乘法對參數進行估計。因變量y與自變量X1、X2、…、Xn之間線性關系為
y=β0+β1X1+β2X2+…+βnXn+ε
(2)
式中β0、β1、…、βn——回歸系數
ε——服從正態獨立同分布的隨機誤差項
通過Matlab軟件完成多元線性回歸模型的建模與驗證。
1.5.2BP神經網絡模型
BP神經網絡(Back propagation neural network,BPNN)是一種根據誤差逆向傳播算法訓練的多層前饋神經網絡[6]。該機器學習模型的拓撲結構一般由輸入層、隱藏層、輸出層組成,本研究采用3層BP神經網絡,其中輸入層與輸出層均采用線性激活函數(purelin),隱含層采用雙曲正切激活函數(tansig),含有10個神經元的單層網絡,為防止數據分析因為不同的量綱得出不同的結果,對輸入層和輸出層數據進行歸一化處理。模型的各參數設置為:訓練擬合目標誤差為0.1%,網絡的學習速率為0.05,最大訓練次數為6 000次,其余參數取默認值。通過Matlab軟件完成BP神經網絡模型的建模和驗證。
1.5.3支持向量機模型
支持向量機(Support vector machines,SVM)是一類按監督學習方式對數據進行二元分類的廣義線性分類器,從功能上可分為分類和回歸兩類[25],可用于非線性分類問題[26],能夠較好地避免“離散值多”的問題。本研究將目前應用廣泛的徑向基核(RBF)作為核函數,懲罰參數C和核參量g則通過在模型中設置循環來選擇和調整,同樣對輸入和輸出數據進行歸一化處理,在Matlab軟件進行支持向量機模型的構建和驗證。
1.6 升尺度轉換方法
1.6.1重采樣升尺度法
在遙感領域,重采樣是一種影像數據重新組織過程中的灰度處理方法[27]。常用的重采樣方法有最鄰近法、雙線性內插法、立方卷積內插法、像元聚合法等。本研究采用像元聚合法實現對無人機遙感影像的重采樣。像元聚合法是對所有的輸出像元值有貢獻的像元平均值進行采樣,通過ENVI軟件Rezise data功能中的Pixel aggregate實現。用重采樣升尺度到分辨率16 m的無人機遙感數據構建的光譜指數修正GF-1衛星數據光譜指數,具體為分辨率16 m的無人機遙感數據的波段反射率及構建光譜指數乘以對應的GF-1衛星數據的波段反射率及光譜指數,得到升尺度修正后的GF-1衛星遙感數據。
1.6.2TsHARP升尺度法
TsHARP升尺度法主要通過構造趨勢面進行尺度轉換,有學者將其應用于土壤鹽漬化的升尺度研究[28],但僅進行了傳統的線性回歸模型函數趨勢面之間的構造。本文通過將目前應用廣泛的BP神經網絡和支持向量機算法進行趨勢面的構造,以實現土壤水分的升尺度研究,提高衛星遙感對土壤含水率的反演,該升尺度法的主要步驟如下:
首先建立無人機尺度上土壤含水率與趨勢面因子間的關系,公式為
S=F(B′)
(3)
式中S——無人機分辨率0.065 m尺度上采用趨勢面因子反演的土壤含水率
F——無人機分辨率0.065 m尺度上趨勢面反演函數或模型,同樣適用于升尺度到GF-1衛星分辨率16 m尺度上土壤含水率與趨勢面因子間的反演
B′——無人機分辨率0.065 m尺度上的趨勢面因子
由于受到土壤鹽分等因素的影響,趨勢面因子總是很難完全反映土壤含水率的分布情況,表現為無人機高分辨率0.065 m尺度上的轉換殘差ΔS,在本文中也認為等于GF-1衛星尺度上的轉換殘差ΔS1,計算公式為
ΔS=S′-S=ΔS1
(4)
式中S′——實測土壤含水率
升尺度修正后GF-1衛星數據源下反演的土壤含水率由GF-1衛星數據應用無人機尺度上建立的趨勢面計算的土壤含水率和衛星尺度上的轉換殘差構成,計算公式為
S16=F16(B16)+ΔS1=F(B16)+ΔS1
(5)
式中S16——升尺度修正后GF-1衛星數據下反演的土壤含水率
B16——GF-1衛星分辨率16 m尺度上的趨勢面因子
1.7 模型精度評價指標
根據調整后的決定系數R2、均方根誤差(RMSE)、赤池信息準則(AIC)和施瓦茨信息準則(SIC)來綜合評價全子集篩選效果;通過調整后R2、RMSE綜合評價升尺度前后各模型的精度與穩定性。調整后R2可以反映建模和驗證的擬合效果,RMSE可以反映反演值與實測值之間的偏差度,其中R2越接近1,RMSE越小,說明模型精度越高。AIC和SIC能夠在一定程度上衡量統計模型的復雜度和擬合優良性,其參數值越小表示該模型能夠以最少自由變量最好地解釋因變量。
2 結果與分析
2.1 相關性分析與全子集篩選確定的最優自變量組合

圖2 波段及光譜指數與不同深度土壤含水率的皮爾遜相關系數Fig.2 Pearson correlation coefficient of band and spectral index and soil moisture content at different depths
參考相關系數檢驗臨界值表進行顯著性檢驗,當樣本數據點為101時,其對應的自由度為99,當相關系數的絕對值大于0.255時,達到0.01顯著性水平。從圖2可以看出,除b3、S5、DVI和SI-T外,其它波段及光譜指數與土壤含水率的相關系數大于0.255,達到0.01顯著水平,分析認為綠波段b2位于綠色植物的綠色反射率附近,對植物的綠反射敏感;而近紅外波段NIR處于植物的高反射區,為植物識別通用波段,與土壤含水率相關性較強,故b2、NIR波段及基于該兩波段建立的BI、SI2、SAVI2、PDI等光譜指數與土壤含水率表現出較強的相關性。相較于其它深度土壤含水率,深度40~60 cm的土壤含水率與各波段及光譜指數的相關系數更小,并未表現出較強的相關性,這與文獻[29]研究結果一致,可能原因是隨著土壤深度增加,土壤內部環境情況越發復雜,遙感作用于土層的能力逐漸下降。
將波段反射率和光譜指數作為自變量,實測土壤含水率為因變量,構建全子集篩選算法模型,根據驗證集調整后R2最大原則,綜合考慮RMSE、AIC和SIC等評價指標,確定不同深度下波段反射率與光譜指數之間的最優變量組合,結果如表2所示。

表2 基于全子集篩選的GF-1衛星數據源下最優變量組合Tab.2 Optimal variable combination under GF-1 satellite data source based on full subset screening
從表2可以看出,0~20 cm、0~40 cm和0~60 cm 3個深度下的R2達0.324以上,其中0~20 cm和 0~60 cm整體達0.368以上,擬合效果較好;而深度40~60 cm下的R2僅有0.10左右,擬合效果較差,原因可能是該深度土壤含水率與各光譜變量的相關性較差。各深度下的AIC和SIC均隨著自變量個數的增多而呈現逐漸上升的趨勢,這是因為隨著自變量個數的增加,模型的擬合效果可能會有所提升,但會受到一定的“懲罰”。各深度下的RMSE大多在0.03%上下波動變化,且隨著R2的增大呈現減小趨勢。不同深度的敏感光譜特征變量總體上是一致的,每一種光譜特征變量在其它深度中均有出現,如S3、DVI等,在不同深度最優變量組合的選擇上以最大R2為首要考慮條件(RMSE與此同時也最小)進行。如深度0~20 cm下自變量個數為6時其R2最大,RMSE最小,故選擇b1、b3、b4、SI2、S3和PDI作為該深度下的最優變量組合,同理篩選出深度20~40 cm的最優變量組合為S3、SI-T;深度40~60 cm的最優變量組合為b4、SAVI2;深度0~40 cm的最優變量組合為b3、b4、BI、S3、S5、PDI;深度0~60 cm的最優變量組合為S3、DVI。
2.2 基于重采樣升尺度法的不同深度土壤含水率反演模型
采用全子集篩選法對升尺度修正后的波段反射率和光譜指數組成的自變量與實測土壤含水率構成的因變量所構建的模型進行一一列舉,通過驗證集調整后R2最大原則,綜合考慮RMSE、AIC和SIC等評價指標,篩選出不同深度下的最優自變量組合,結果如下:0~20 cm為b1、S3、S6、TSAVI,20~40 cm為b1、b3、S3,40~60 cm為b1、b2、b3、b4、S3、SAVI2,0~40 cm為b2、b3、S3、S6、SI-T,0~60 cm為b2、S3、S5、S6、SI-T。
以全子集篩選出的升尺度修正后GF-1衛星數據下的最優變量組合為自變量,實測土壤含水率為因變量,運用多元線性回歸、BP神經網絡以及支持向量機算法構建不同深度下土壤水分反演模型,并與直接采用GF-1衛星數據源構建的土壤水分反演模型進行對比,評價升尺度修正前后GF-1衛星遙感對土壤含水率的反演效果。
2.2.1多元線性回歸模型
由表3可知,升尺度修正后的0~20 cm和40~60 cm MLR模型的反演精度較升尺度修正前有明顯的提升,二者驗證集的R2分別提高0.211、0.180,分析認為重采樣中的像元聚合(Pixel aggregate)對輸出的所有有貢獻的像元做了取均值處理,能夠一定程度上減小建模集與驗證集劃分不均的影響。土壤深度 0~40 cm的反演效果較好,模型的R2達到0.530,RMSE為0.028%。與升尺度修正前相比,5種深度模型的反演精度均有較為明顯的提高,RMSE有一定程度上的降低,說明該升尺度方法有效。
兩組患者均無心源性死亡和再發心肌梗死(0例),治療組和對照組分別有5例、6例患者行靶血管重建。兩組患者MACE比較,差異無統計學意義(P>0.05)。

表3 重采樣法下不同深度土壤含水率的多元線性 回歸模型精度Tab.3 Precision of MLR model of soil moisture content at different depths by resampling method
2.2.2BP神經網絡模型
由表4可知,升尺度修正后GF-1衛星數據下的各深度BPNN模型的R2整體提高0.11左右,部分深度如0~20 cm和0~60 cm BPNN模型的R2提高0.15左右,RMSE整體在0.031%以下,均比升尺度修正前明顯降低。各深度BPNN模型建模集與驗證集的R2相近,無過擬合或欠擬合現象,模型的擬合效果較好。升尺度修正后的40~60 cm BPNN模型的反演精度R2明顯低于其它深度,建模與驗證效果較差,不適宜進行土壤含水率反演。
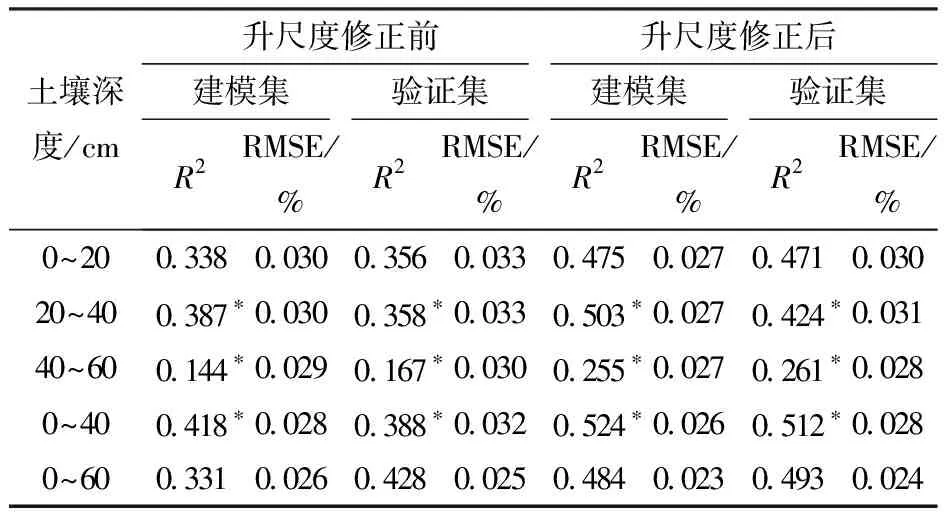
表4 重采樣法下不同深度土壤含水率的BP神經網絡 模型精度Tab.4 Precision of BPNN model of soil moisture content at different depths by resampling method
2.2.3支持向量機模型
由表5可知,在5種不同深度的升尺度修正后SVM模型中,0~40 cm和0~60 cm SVM模型的R2較升尺度修正前提升最明顯,其中,0~40 cm SVM模型的R2提升0.176;0~60 cm SVM模型的R2提升0.158,R2達到0.571,RMSE降低至0.022%,降幅15.4%,為最優深度反演,而其它3個深度SVM模型的反演精度也有明顯幅度的提高。升尺度修正后GF-1衛星數據下部分深度SVM模型的反演精度R2最大能提高近0.176,RMSE對應升尺度修正前有較為明顯的降低,表明該升尺度法能提高GF-1衛星遙感對土壤含水率的反演精度。

表5 重采樣法下不同深度土壤含水率的支持向量機 模型精度Tab.5 Precision of SVM model of soil moisture content at different depths by resampling method
2.3 基于TsHARP升尺度法的不同深度土壤含水率反演模型
由2.1、2.2節可知,深度40~60 cm下各土壤水分反演模型的建模效果明顯較其它深度差,不適宜進行土壤水分反演。實際上,隨著土層深度的增加,遙感作用于地表的能力逐漸下降,越深處的土壤水分反演顯然不合理甚至是錯誤的。因此,在本節TsHARP升尺度法中只進行深度0~20 cm、20~40 cm、0~40 cm及0~60 cm土壤含水率反演模型的建立與分析。
2.3.1多元線性回歸模型
由表6可知,與升尺度修正前相比,各深度模型的反演精度有較為明顯的提高,除0~20 cm MLR模型外,其它3種深度模型R2整體從0.4左右提升至0.5以上。其中,0~20 cm MLR模型驗證集的R2較升尺度修正前提升0.141,0~60 cm MLR模型建模集的R2較升尺度修正前提升0.213,提升幅度明顯。升尺度修正后的各深度MLR模型的RMSE整體有所降低,說明該升尺度法在提高GF-1衛星遙感對土壤水分的反演精度可行。

表6 TsHARP升尺度法下不同深度土壤含水率的 多元線性回歸模型精度Tab.6 Precision of MLR model of soil moisture content at different depths by TsHARP scale-up method
2.3.2BP神經網絡模型
由表7可知,除0~40 cm BPNN模型外,其它3種深度模型的反演精度R2整體達到0.7以上,較升尺度修正前顯著提高,RMSE整體下降明顯。其中升尺度修正后的0~60 cm BPNN模型的R2最高提升至0.829,RMSE最低降至0.015%,降幅達到40%,為最優反演。與2.3.1節MLR模型相比,各深度BPNN模型的反演效果有著顯著的改善,明顯優于多元線性回歸算法,說明運用BP神經網絡算法構建趨勢面可行, TsHARP升尺度法的優勢能得以較好地展現。

表7 TsHARP升尺度法下不同深度土壤含水率的 BP神經網絡模型精度Tab.7 Precision of BPNN model of soil moisture content at different depths by TsHARP scale-up method
2.3.3支持向量機模型
由表8可知,升尺度修正后4種深度SVM模型的R2達到0.6以上,與升尺度修正前相比有明顯提高;除20~40 cm SVM模型驗證集外,其它深度模型的RMSE均對應升尺度修正前明顯降低。其中,0~20 cm、0~40 cm和0~60 cm SVM模型R2較升尺度修正前提升最明顯。與2.3.2節基于BP神經網絡算法的TsHARP升尺度法在提高反演模型精度上所得結論相似,運用支持向量機的機器學習算法構造趨勢面能有效發揮TsHARP升尺度法的效果以提高模型反演精度。

表8 TsHARP升尺度法下不同深度土壤含水率的 支持向量機模型精度Tab.8 Precision of SVM model of soil moisture content at different depths by TsHARP scale-up method
2.4 升尺度反演模型綜合評價
由于基于TsHARP升尺度法的修正后GF-1衛星數據下只進行了深度0~20 cm、20~40 cm、0~40 cm和 0~60 cm土壤含水率的反演,故以下主要對比這4種不同深度在基于重采樣和TsHARP升尺度法的修正后GF-1衛星數據下構建的土壤含水率反演模型。將兩種升尺度方法下采用不同算法構建的不同深度土壤含水率反演模型的評價指標R2繪制成柱形圖,以直觀對比不同深度不同模型的反演精度,結果如圖3所示。
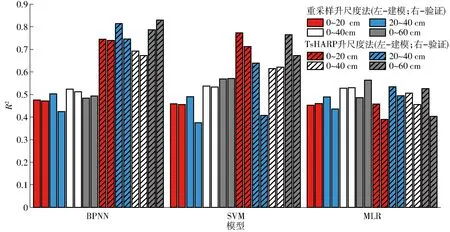
圖3 基于兩種升尺度法的不同深度下土壤含水率反演模型對比Fig.3 Comparison of soil moisture inversion models at different depths based on two scale-up methods
由圖3可知,重采樣升尺度法下SVM模型的反演精度最高,而MLR模型整體略優于BPNN模型,即精度由高到低依次為SVM、MLR、BPNN;TsHARP升尺度方法下采用BPNN和SVM兩種機器學習算法構建的反演模型均優于MLR算法,而BPNN算法又整體優于SVM算法,即精度由高到低依次為BPNN、SVM、MLR。
采用機器學習算法的TsHARP升尺度法構建的反演模型精度較高且明顯優于基于多元線性回歸算法,TsHARP升尺度法下反演模型的R2可達0.7以上,說明采用BPNN和SVM算法構造趨勢面進行升尺度轉換可行。
對于基于多元線性回歸算法的重采樣和TsHARP升尺度法中,兩種不同升尺度法下的不同深度MLR模型的反演精度整體相差不大,而TsHARP升尺度法下的4種不同深度BPNN和SVM模型的反演精度R2均明顯高于基于重采樣升尺度法(重采樣升尺度法下反演模型最大R2約為0.57),說明TsHARP升尺度法整體上優于重采樣升尺度法。
2.5 沙壕渠灌域土壤含水率反演
由上述可知,TsHARP升尺度法下0~60 cm BPNN模型的反演效果最好,故選用該模型反演河套灌區內整個沙壕渠的土壤含水率空間分布情況,結果如圖4所示。

圖4 沙壕渠土壤含水率反演結果Fig.4 Inversion result of soil moisture content in Shahaoqu
由圖4可知,土壤含水率在0~10%、10%~15%、15%~20%和大于20%分別約占整個沙壕渠研究區的15%、38%、24%和23%,根據內蒙古土壤墑情類型及其含水率等級指標[30],認為土壤含水率低于15%時便出現干旱,而沙壕渠灌域約有53%的區域的土壤含水率低于15%(主要分布在中部、西北部和南部),說明整個沙壕渠灌域較為干旱缺水,這與該區域處于西北內陸干旱半干旱區、整體缺乏水資源的實際情況相符。同時也可以看到沙壕渠土壤含水率高于15%的區域占比約47%,其原因可能是7月下旬氣溫較高,作物需水量較大,灌區進行了較多次的人為引水灌溉以保證作物生長發育所需的水分,故該時間段內作物種植區域的土壤水分含量能維持在一定水平。
3 討論
本文旨在分析升尺度修正前后GF-1衛星遙感數據源下不同波段及光譜指數與不同深度土壤含水率之間的統計關系,建立土壤水分反演模型,為灌區進行農業生產及干旱監測提供依據。一般而言,受限于遙感平臺,僅基于單一的低、中等分辨率的衛星遙感在大尺度范圍上反演表層土壤水分和鹽分的能力較為有限。如張智韜等[9]利用GF-1衛星遙感反演沙壕渠灌域農田表層土壤鹽分,其構建的反演模型的精度R2在0.14~0.31之間。姚一飛等[17]利用GF-1衛星遙感對河套灌區不同土層深度農田土壤水分進行了反演,反演模型的R2大多位于0.4上下,部分深度反演模型的最大R2為采用機器學習算法構建所得,R2達到0.5左右,RMSE在0.025%上下。而本研究通過采用重采樣和TsHARP升尺度法將無人機遙感數據上推以修正GF-1衛星遙感數據,構建不同土壤深度下無人機-衛星升尺度土壤水分反演模型,顯著提高了衛星遙感在大尺度范圍上對地表表層土壤水分的反演精度。其中,在TsHARP升尺度法中,相對基于傳統的多元線性回歸算法,將目前應用廣泛的BP神經網絡和支持向量機兩種機器學習算法進行趨勢面的構造,不同深度反演模型的R2整體由0.4提高至0.7以上,RMSE整體由0.025%降低至0.015%,大幅度提高了GF-1衛星對表層土壤水分的監測精度。由此可見,通過采用較低成本的無人機遙感工具輔助協同衛星遙感并進行合理的尺度轉換,能有效提高衛星遙感在大尺度上對地表地物信息的監測,從而解決單一衛星遙感在大尺度范圍監測地物信息精度不高的問題,具有一定的研究意義和實際應用價值。
本研究中,土壤深度0~60 cm和0~40 cm下的反演效果整體優于其它3種深度,其中0~60 cm略優于0~40 cm,深度0~20 cm和20~40 cm次之,深度40~60 cm反演效果最差,其原因主要是7月末為作物(葵花、玉米等)苗期結束、拔節期伊始時節,作物的大部分根系已向下伸展至深度60 cm,此時作物根系主要在距地表土壤深度0~50 cm下進行水分的吸收[31],在深度0~40 cm和0~60 cm處的根系對土壤水分更為敏感[32],從而表現出最佳的反演效果;而0~20 cm淺表層處的土壤水分容易受到太陽輻射、降水、風速等外界自然條件變化影響,在短時間內土壤水分難以維持一個相對穩定的狀態,其在土壤樣本采集試驗與衛星成像間隔期間土壤水分已發生了變化,一定程度上失去了影響成像時刻的真實土壤水分。如張智韜等[33]基于TM5和TM7數據,采用歸一化土壤濕度指數監測寶雞峽二支渠灌區不同深度土壤含水率,得出的最佳監測深度為0~40 cm和0~60 cm,優于0~20 cm和0~10 cm;屈創[34]基于LandsatETM+和ASTER兩種不同遙感數據,采用溫度植被干旱指數法反演白龍江流域不同深度土壤水分,也得出深度0~40 cm和0~60 cm的反演精度高于0~20 cm的結論(野外實測土壤水分時間和衛星成像時刻間隔7 d);姚一飛等[17]基于GF-1衛星遙感對河套灌區不同土層深度農田土壤水分進行反演,同樣得到土壤深度0~40 cm和0~60 cm的反演效果優于淺層 0~20 cm 的相似結論(野外實測土壤水分與衛星成像時刻存在間隔)。因此,在今后的研究中應盡量保證野外實測資料與遙感影像成像時間的同步,以減少影像成像時刻土壤含水率的真值丟失,從而提高淺層土壤水分的反演精度。
本研究仍存在一些不足,需要進一步深入探索。如光譜指數的選擇是否最佳以及未采用另一種或多種變量篩選方法進行對比,所得的各深度最優變量組合實際上未必最優。此外,所建模型算法也僅是對波段及光譜指數與土壤含水率之間進行數量上的相關統計分析,這兩者之間是否存在其它內在機理等聯系仍有待探索[35],未來可著重在這方面上進行深入研究。內蒙古河套灌區作為本文的研究區,土壤鹽漬化問題較為突出,而水分中常常含有各種鹽分,且二者之間的運移[36-37]、交互等作用復雜[38],需要從物理學、化學機制以及數學模型等進一步分析鹽分的影響并采取合理的方法進行剔除,故本研究所得結論的普適性還有待進一步探索。重采樣和TsHARP升尺度法各有其特點和優勢,未來可根據實際情況考慮將兩種升尺度方法結合,以實現更為全面、合理的升尺度研究。
4 結論
(1)基于兩種升尺度方法下的各深度MLR、BPNN和SVM模型的R2均較修正前較明顯提高,各模型的RMSE均對應升尺度修正前明顯降低。其中,重采樣升尺度法在土壤深度0~60 cm下采用SVM模型最優,R2達到0.571,RMSE為0.022%;TsHARP升尺度法在土壤深度0~60 cm下采用BPNN模型最優,R2達到0.829,RMSE為0.015%。
(2)重采樣升尺度法在不同土壤深度下模型整體精度由高到低依次為SVM模型、MLR模型、BPNN模型,TsHARP升尺度法在不同土壤深度下模型整體精度由高到低依次為BPNN模型、SVM模型、MLR模型,5種不同深度土壤下反演效果由高到低依次為0~60 cm、0~40 cm、0~20 cm、20~40 cm、40~60 cm。
(3)與升尺度修正前對應土壤深度模型對比,兩種升尺度方法均能明顯提高衛星遙感對土壤含水率的反演精度,但TsHARP升尺度法整體優于重采樣法;重采樣法的R2由0.413提升至0.571,RMSE由0.026%降至0.022%(降幅15.4%);TsHARP升尺度法的R2由0.428提升至0.829,RMSE由0.025%降至0.015%(降幅40.0%)。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
