基于STM32的醫(yī)用送藥智能車設(shè)計與實現(xiàn)
2023-06-03 18:04:59王怡雯張曉輝
電腦知識與技術(shù) 2023年10期
王怡雯 張曉輝
關(guān)鍵詞:STM32F407ZGT6;送藥車;K210 攝像頭;圖像
中圖分類號:TP249 文獻標(biāo)識碼:A
文章編號:1009-3044(2023)10-0025-04
0 引言
送藥車是醫(yī)院藥房藥品轉(zhuǎn)運的設(shè)備,適用于藥房和患者之間的藥品傳送。現(xiàn)有的醫(yī)用送藥車大多采用手推車,容易造成藥品錯發(fā)、漏發(fā)的醫(yī)療糾紛,無法滿足“未來醫(yī)院”患者藥品調(diào)劑精細化、智能化管理的需求,給大數(shù)據(jù)時代的醫(yī)院工作帶來各種不方便。
國外公司的送藥機器人基本都是室外送藥機器人,對于室內(nèi)送藥機器人與國內(nèi)一樣有許多問題,很多問題都處于研究階段,對于室內(nèi)送藥機器人的商業(yè)化還有非常大的一段距離。在實際的運行過程中,發(fā)現(xiàn)了許多的因道路而產(chǎn)生的問題:①當(dāng)下雨天有人在地上鋪上毯子,醫(yī)院或藥房送藥時,送藥機器人對這一路段的通過能力大大降低,有失敗的風(fēng)險,并且行駛過程中穩(wěn)定性也下降不少。②多個小車協(xié)作運行過程中的相互避障及對路線實時規(guī)劃的問題,環(huán)境因素(人為或非人為)發(fā)生改變后小車的適應(yīng)性問題和學(xué)習(xí)能力等,都還需要改善。尤其近年來,疫情反復(fù)無常,為了盡量減少醫(yī)生、病人等人員之間的直接接觸機會,設(shè)計一種送藥智能車,能夠根據(jù)藥房、病房號進行自動識別,將藥品及其他檢測樣本進行準(zhǔn)確投送。
1 送藥智能車的總體設(shè)計
送藥智能車控制系統(tǒng)原理框圖如圖1所示,主要包括核心控制器STM32F407ZGT6、HC-05 藍牙通信電路、K210攝像頭、TB6612驅(qū)動電路、TFT顯示屏、減速編碼電機、灰度傳感器、紅外光電感應(yīng)開關(guān)等。
系統(tǒng)工作時,利用紅外光電開關(guān)檢測藥品的放置,使用HC-05藍牙模塊實現(xiàn)無線數(shù)據(jù)交換,傳遞送藥智能車當(dāng)前位置和任務(wù)信息。核心控制器STM32F407ZGT6控制TB6612電動驅(qū)動模塊實現(xiàn)送藥車減速編碼電機的驅(qū)動,減速編碼電機和萬向輪驅(qū)動小車實現(xiàn)行進和轉(zhuǎn)向,使送藥車自動運行。利用灰度傳感器獲得灰度值,采用七路灰度傳感器高效區(qū)分不同灰度(顏色)的尋徑線,實現(xiàn)送藥智能車的尋徑功能。K210攝像頭進行圖像采集,并采用浮雕濾波算法進行預(yù)處理,實現(xiàn)圖像識別、顏色、物體識別、MNIST手寫數(shù)字識別等多種功能,從而實現(xiàn)對多個病房號碼識別功能[1]。
2 送藥車控制系統(tǒng)硬件電路設(shè)計
2.1 供電電路
供電電路采用2路LM2596S-ADJ為核心組成的DC-DC可調(diào)降壓電路,LM2596S-ADJ芯片內(nèi)部有開關(guān)頻率150KHz的固定頻率發(fā)生器,并具有頻率補償功能,轉(zhuǎn)換效率達95%以上。供電電路原理圖如圖2 所示:
LM2596S-ADJ芯片只需要4個外接元器件就可以工作,一路將電池輸出電壓穩(wěn)定在8V供送藥智能車驅(qū)動,另一路將電池電壓穩(wěn)定在5V供各模塊使用。
2.2 電機驅(qū)動電路
本系統(tǒng)送藥智能車使用TB6612 驅(qū)動電路,TB6612是一種可以同時獨立地控制兩臺直流電動機的新型驅(qū)動芯片。它的集成度非常高,且能輸出比較高的電流提供足夠的產(chǎn)能,在運行電動機的性能和能源消耗方面也具有優(yōu)勢。因此,它可以作為集成、小型電動機的控制系統(tǒng)中非常理想的電機驅(qū)動裝置。驅(qū)動電路原理圖如圖3所示:
2.3 主控板電路
主控板采用自主設(shè)計的集成各功能的PCB電路板,包括鍵盤、TFT顯示屏、電機接口、串口以及LED指示燈等,而且板載的1117芯片可將5V電壓轉(zhuǎn)降至3.3V 以供應(yīng)芯片運行。主控板電路如圖4 所示,按鍵、陀螺儀模塊電路如圖5所示,顯示屏、串口模塊電路如圖6所示。
3 送藥智能車的圖像處理
3.1 數(shù)字識別方法
送藥智能車駛向目標(biāo)病房需要攝像頭對病房號碼的準(zhǔn)確識別并且對號碼位置的精確判斷,前者可以使用目標(biāo)分類達到很好的效果,但對目標(biāo)數(shù)字位置識別涉及對圖片內(nèi)多個數(shù)字的處理,存在較大的難度。
YOLOv3采用的one stage目標(biāo)檢測算法具有較高的運算速度,可以同時檢測多個目標(biāo),并對相應(yīng)的目標(biāo)值進行標(biāo)注,獲取目標(biāo)的各種信息。能夠同時測量多種數(shù)據(jù),并對相應(yīng)的目標(biāo)值加以標(biāo)注,從而得到項目的所有特征。可以首先利用特征提取數(shù)字的輸入特征,從而獲取一定尺寸的特征圖形輸出。將圖像分為13×13的網(wǎng)格單元,然后假設(shè)真實框的一個對象的中心位置落在一個方格上,然后就可以根據(jù)這個方格來推測這個對象。如果一個對象中有一定數(shù)量的邊界框,在YOLOv3中有三個邊界框,然后通過邏輯回歸可以得到用來推測的回歸框[2]。
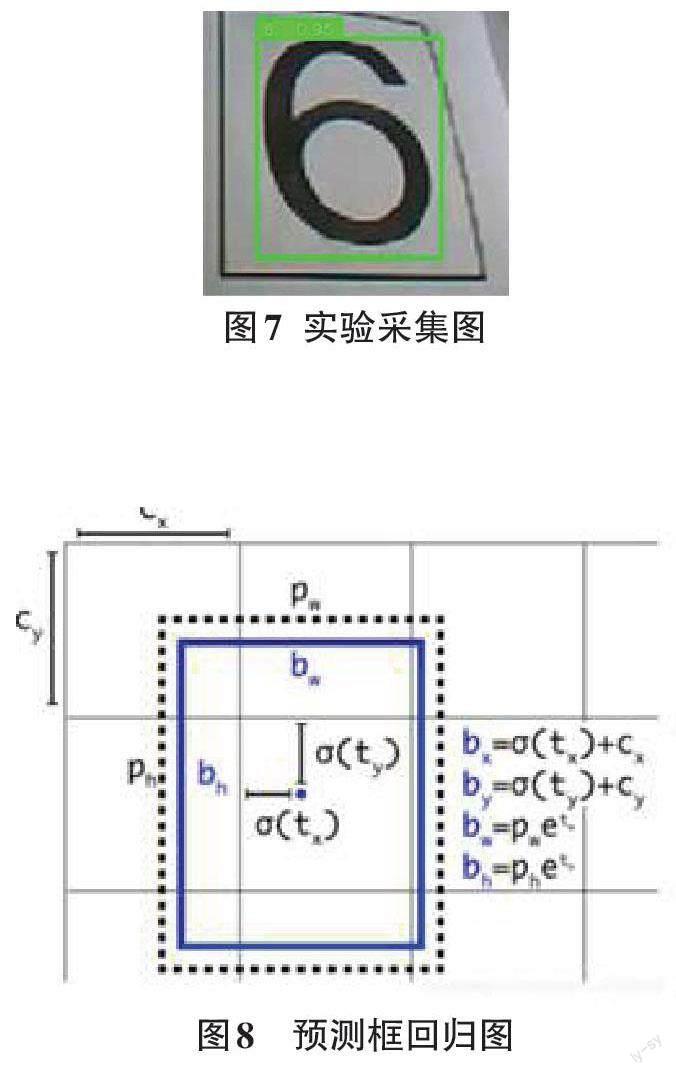
要檢測出目標(biāo)數(shù)字在圖像中的位置,就得需要位置信息,也就是bounding box,如圖7中所示需要知道中心點的坐標(biāo),框的寬和高,也就是包含4個值:x,y,w,h,(x,y)代表box 的中心,(w,h)代表box 的寬和高。
3.2 預(yù)測框回歸
預(yù)測框回歸圖如圖8所示:
YOLOv3網(wǎng)絡(luò)最終需要通過回歸檢測得到這些信息,回歸思想是指先驗框(anchor box)到真實框(ground truth box)之間是一種回歸關(guān)系,先驗框是通過預(yù)先選定的一些框,來幫助本系統(tǒng)最終得到真實的框,在代碼中先驗框信息(寬和高)是固定在代碼中的,它包含了三個尺寸,有的大有的小,且橫縱比有一些區(qū)別,如圖通過YOLOv3網(wǎng)絡(luò)訓(xùn)練后會得到一種映射關(guān)系,先驗框會回歸到真實框,Anchor box 到Ground truth box之間可以通過中心點的坐標(biāo)的偏移,以及框的寬和高的放縮來最終得到真實框[3]。
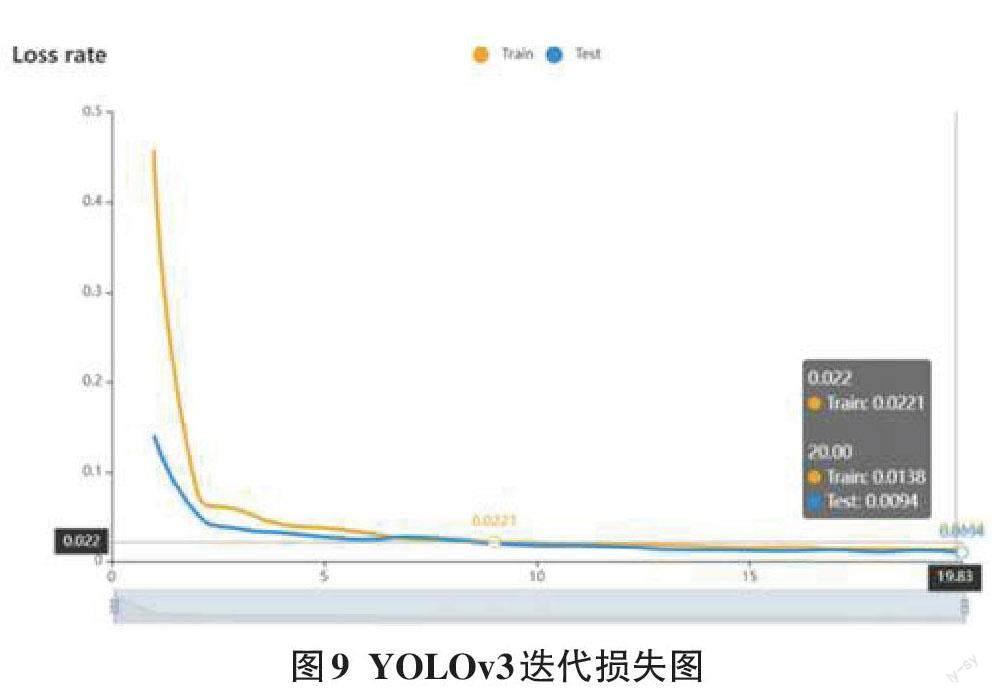
系統(tǒng)采用K210采集大量原始數(shù)據(jù),進行數(shù)據(jù)集標(biāo)注,通過LabelImg工具進行數(shù)據(jù)集創(chuàng)建與標(biāo)注,再通過Tensorflow框架訓(xùn)練YOLOv3模型,本系統(tǒng)將一千兩百張不同角度、不同明暗對比度、不同焦距的圖片傳入框架進行訓(xùn)練,最終得到滿意的YOLOv3模型,由圖9可以看出,經(jīng)過9次迭代損失率可以達到較低水平,大于9次迭代后損失率下降不再明顯。
浮雕濾波器是一種常用數(shù)字濾波器,能夠給圖像一種3D陰影的效果。只需要用中心這一邊的像素減去另一邊的像素。此時,像素值的正負是不確定的,本系統(tǒng)將小于0當(dāng)成陰影部分,將大于0當(dāng)成光影部分,然后對圖像的結(jié)果加上偏移。這時候,圖像大部分就變成灰色了。
將訓(xùn)練的模型YOLOv3.tflite文件轉(zhuǎn)化為YOLOv3.kmodel 文件,將其放在系統(tǒng)SD卡的根目錄下,通過K210程序調(diào)用攝像頭進行數(shù)字的實時識別。將識別的結(jié)果通過串口通信實時地發(fā)送給主控制器。
3.3 自動尋徑方法
本系統(tǒng)采用7路灰度傳感器,裝在送藥智能車車頭下方,用于尋徑和記錄送藥智能車所處位置。灰度傳感器采用光敏二極管,在識別到顏色變化時改變輸出信號。尋跡模塊的7個灰度傳感器檢測道路,根據(jù)灰度傳感器的返回的灰度值和邏輯電平信號,判斷送藥智能車相對道路中間所在的位置,調(diào)整送藥智能車兩個電機的速度從而改變運行軌跡,使送藥智能車始終沿著軌道行走。根據(jù)當(dāng)前傳感器的返回值,確定智能送藥車所在道路的位置,從而改變車輛的行駛方向的走向,讓車輛一直沿著道路中間的實線運行。送藥智能車的初始位置定在道路的中間,使用最中間的灰度傳感器壓線,送藥智能車將默認以直線方式前進,在前進一段距離后,因為摩擦力和軌道曲線變化及電機的區(qū)別等問題,送藥智能車將脫離軌道線而偏向另一方向,這時車輛就必須通過從灰度傳感器中得到的數(shù)據(jù)進行判別,以實時的方式選擇送藥車輛運行路線[4-5]。
若是七路灰度傳感器檢測不到道路,表明送藥智能車到達了門口區(qū)域,這時會自動原地轉(zhuǎn)向進行藥品裝卸。
根據(jù)道路情況,在程序內(nèi)部建立各個病房位置的絕對坐標(biāo)系和相對于小車位置的相對坐標(biāo)系,主控制器根據(jù)接收到灰度傳感器的數(shù)據(jù)和電機編碼器的值進行計算,得出送藥智能車此刻位于道路的位置,通過送藥智能車自身傳感器配以PID算法產(chǎn)生中斷對指令的執(zhí)行進行微調(diào),更好地完成任務(wù)。
4 送藥智能車的控制系統(tǒng)軟件設(shè)計
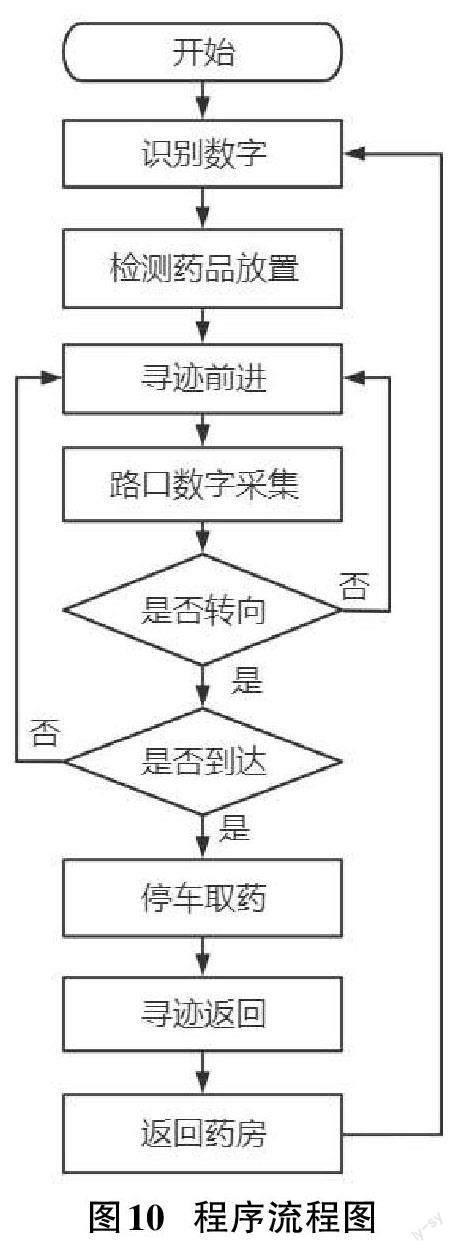
送藥智能車控制系統(tǒng)軟件主要包括主程序、圖像處理程序、數(shù)字識別程序、自動尋徑程序、雙車通信程序等,限于篇幅,在此僅介紹主程序。系統(tǒng)程序流程圖如圖10所示。
5 結(jié)束語
本次設(shè)計的醫(yī)用送藥智能車具有自主避障、自動循跡、藥房和病房的自動識別等功能,實現(xiàn)了藥房與病房之間藥品及其他檢測樣本的精準(zhǔn)投送,減輕了醫(yī)護人員的勞動強度,提高了工作效率。
猜你喜歡
中國合理用藥探索(2022年1期)2022-11-26 00:22:32
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中國衛(wèi)生(2016年5期)2016-11-12 13:25:28
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
