線性變參數(shù)系統(tǒng)抗擾動(dòng)魯棒模型預(yù)測控制
2023-06-01 13:43:06邢麗娟楊世忠
計(jì)算機(jī)仿真 2023年4期
關(guān)鍵詞:系統(tǒng)
邢麗娟,楊世忠
(青島理工大學(xué)信息與控制工程學(xué)院,山東 青島 266520)
1 引言
在實(shí)際的控制中,系統(tǒng)對象模型參數(shù)的不確定性以及持續(xù)有界擾動(dòng)的存在,對系統(tǒng)的穩(wěn)定性控制造成影響[1-2]。魯棒模型預(yù)測控制由于可以顯式地表示系統(tǒng)的模型不確定性和約束條件,在控制過程中應(yīng)用和研究較為廣泛[3,4]。當(dāng)系統(tǒng)存在持續(xù)有界擾動(dòng)時(shí),由于干擾的影響,使得系統(tǒng)的狀態(tài)變量不能被準(zhǔn)確獲得。文獻(xiàn)[5]采用基于觀測器的輸出反饋魯棒模型預(yù)測控制,通過在線約束優(yōu)化實(shí)現(xiàn)系統(tǒng)的穩(wěn)定控制。文獻(xiàn)[6]針對具有輸入飽和的動(dòng)態(tài)輸出反饋系統(tǒng),采用輸出反饋魯棒模型預(yù)測控制,用凸優(yōu)化方法保證了估計(jì)的狀態(tài)和估計(jì)誤差收斂。文獻(xiàn)[7]設(shè)計(jì)基于管的輸出反饋魯棒模型預(yù)測控制,采用帶縮放終端約束集的一步標(biāo)稱系統(tǒng)預(yù)測,實(shí)現(xiàn)對具有有界擾動(dòng)的離散時(shí)間線性參數(shù)變化系統(tǒng)的穩(wěn)定控制。為減少控制的復(fù)雜性,文獻(xiàn)[8,9]將抗擾動(dòng)不變橢圓集的方法應(yīng)用于持續(xù)擾動(dòng)問題,通過狀態(tài)反饋控制抑制干擾對系統(tǒng)穩(wěn)定性的影響,實(shí)現(xiàn)系統(tǒng)的穩(wěn)定控制,但系統(tǒng)控制的控制精度和快速性還有待提高。文獻(xiàn)[10]通過不變集理論,采用嵌套不變橢圓集魯棒控制算法實(shí)現(xiàn)持續(xù)有界擾動(dòng)系統(tǒng)的快速穩(wěn)定控制,但控制域的范圍有待提高。
本文根據(jù)以上文獻(xiàn)進(jìn)行如下設(shè)計(jì):①綜合擾動(dòng)的影響和系統(tǒng)參數(shù)不確定性,通過離線優(yōu)化出一系列不變多面體集序列和對應(yīng)的控制律。②在線時(shí),為實(shí)現(xiàn)系統(tǒng)的快速穩(wěn)定控制,根據(jù)狀態(tài)變量在多面體不變集中的位置,在對應(yīng)的離線控制律的凸包范圍內(nèi)優(yōu)化出實(shí)際控制律。本算法抑制了持續(xù)有界干擾對系統(tǒng)控制的影響,減小了在線算法工作量,實(shí)現(xiàn)了系統(tǒng)的有效控制。
2 問題描述
具有持續(xù)有界擾動(dòng)的線性變參數(shù)系統(tǒng)離散模型為
x(k+1)=Ax(k)+Bu(k)+Dω(k)
y(k)=Cx(k)
[AB]∈Ω
(1)
其中:A∈Rn×n,B∈Rn×m,C∈Rn×n,D∈Rn×l
Ω=Cov{[A1B1],[A2B2],…,[ANBN]}

A,B可控,rank(C)=n
系統(tǒng)(1)的輸入約束
(2)
根據(jù)抗擾動(dòng)不變橢圓集魯棒控制原理[8],系統(tǒng)(1)若滿足:
Sx={x(k)∈Rn|x(k)TP-1x(k)≤1},P>0
(3)
其中x(0)∈Sx,在k≥0,有x(k)∈Sx,則Sx為系統(tǒng)(1)的不變單橢圓集。
由系統(tǒng)(1)可知輸出變量y=Cx,則有x=C-1y,將x=C-1y帶入xTP-1x≤1,有yT(CPCT)-1y≤1。
Sy={y∈Rn|yT(CPCT)-1y≤1}
(4)
若線性變參數(shù)系統(tǒng)的控制律為K,系統(tǒng)(1)的輸入變量為
u=Kx
(5)
設(shè)K表示為
K=YP-1
(6)
采用抗擾動(dòng)不變橢圓集魯棒控制原理,并考慮系統(tǒng)的狀態(tài)方程參數(shù)不確定性,給出如下優(yōu)化控制算法

(7)
s.t.
(8)
(9)

(10)
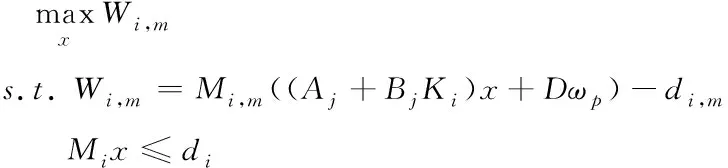
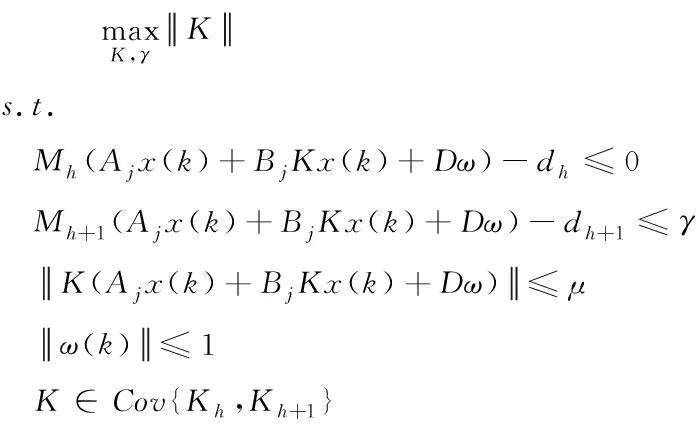
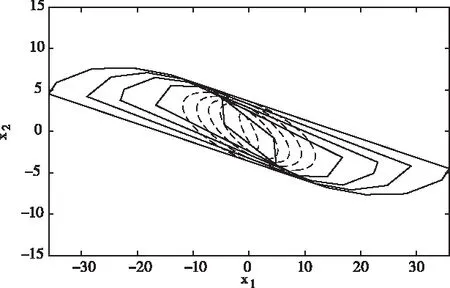
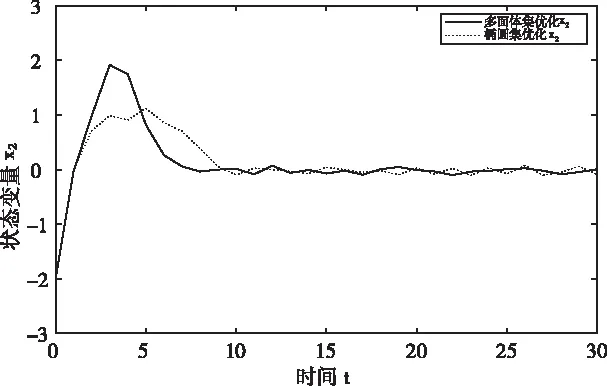
其中:a滿足0 持續(xù)有界擾動(dòng)系統(tǒng)的嵌套不變橢圓集魯棒控制算法根據(jù)狀態(tài)變量的變化,以采用不同的控制律實(shí)現(xiàn)對系統(tǒng)的控制。但是,從系統(tǒng)(1)可以看到,狀態(tài)變量變化的范圍約束是不等式的形式,這樣所構(gòu)造的不變橢圓集只是真實(shí)多面體不變集的近似,所以得到的控制結(jié)果較為保守。因此,本文在設(shè)計(jì)中離線構(gòu)造與控制律序列相對應(yīng)的多面體不變集序列,擴(kuò)大了系統(tǒng)控制的可行域。 算法1:對于具有持續(xù)有界擾動(dòng)的線性變參數(shù)系統(tǒng)(1)和約束條件(2)。 1)根據(jù)初始狀態(tài)變量,確定一系列趨于穩(wěn)定點(diǎn)的狀態(tài)變量; 2)將每個(gè)得到的狀態(tài)變量帶入式(7)~(10),優(yōu)化得出一系列P和Y;根據(jù)式(3)可得到一系列橢圓集。 3)由式(6)得到一系列控制律K。 從算法1可以得到具有持續(xù)有界擾動(dòng)的線性變參數(shù)系統(tǒng)的系列橢圓集和對應(yīng)的控制律K,其中得到的系列控制律K為構(gòu)建系列多面體集提供約束條件。由于系統(tǒng)具有持續(xù)有界干擾,構(gòu)建多面體集時(shí)需要考慮干擾的影響。 算法2:對于具有持續(xù)有界擾動(dòng)的線性變參數(shù)系統(tǒng)(1)和輸入約束條件(2),以及算法(1)得到的一系列控制律Ki。 1)根據(jù)式(2)構(gòu)建多面體不變集Si={x|Mix≤di},i=1,…,M,其中: 2)對(Mi,di)取其第m行,求解以下優(yōu)化算式 (11) 若Wi,m>0,對(Mi,di)添加約束項(xiàng): Mi,m(Aj+BjKi)x≤di,m-(Mi,mDωp) 令di,m=di,m-(Mi,mDωp) 得到: 3)令m=m+1,若m大于Mi的行數(shù),算法結(jié)束,否則重復(fù)步驟2)。 由算法2得到系統(tǒng)的一系列離線多面體集,增大了系統(tǒng)相應(yīng)的控制區(qū)域,使得系統(tǒng)控制的作用增強(qiáng),系統(tǒng)可以快速達(dá)到穩(wěn)定點(diǎn)。 由于系統(tǒng)狀態(tài)變量的不同可以對應(yīng)不同的控制變量,離線多面體不變集的數(shù)量不可能選擇無窮多,以對應(yīng)無窮多個(gè)不同的狀態(tài)變量的變化。這樣,每次控制迭代實(shí)現(xiàn)的控制律具有保守性。本設(shè)計(jì)中在離線算法的基礎(chǔ)上,在每個(gè)控制周期中,測得系統(tǒng)的狀態(tài)變量處于任意兩個(gè)相鄰多面體不變集之間時(shí),在這兩個(gè)多面體不變集對應(yīng)的控制律的多胞體中,尋求最優(yōu)的實(shí)時(shí)狀態(tài)控制律,以提高系統(tǒng)的控制效果。 算法3 對于具有持續(xù)有界擾動(dòng)的線性變參數(shù)系統(tǒng)(1)和輸入約束條件(2),以及由算法2得到的一系列離線多面體不變集和相應(yīng)的控制律。 1)將實(shí)時(shí)狀態(tài)變量x(k)代入Si={x|Mix≤di},i=1,…,M,尋找x(k)在多面體不變集序列中所處的位置。 2)若Mhx≤dh,h=M,則x(k)位于離線得出的多面體集序列中的最小多面體集Sm內(nèi)部,實(shí)際控制律取KM。 3)若Mhx≤dh,Mh+1x>dh+1,h (12) 4)將優(yōu)化出的控制律K代入式(5),得到控制量u(k)。 定理1:對于系統(tǒng)(1)和輸入約束(2),通過算法3中式(12)的優(yōu)化求解得到的控制量可實(shí)現(xiàn)系統(tǒng)的穩(wěn)定控制。 證明:在算法2中多面體的構(gòu)建考慮到系統(tǒng)持續(xù)有界擾動(dòng)的影響,通過式(12)迭代添加非冗余約束 Mi,m(Aj+BjKi)x≤di,m-(Mi,mDωp) 令di,m=di,m-(Mi,mDωp),可得到 這樣就確定初始狀態(tài)變量xi的集合 Si={xi|Mixi≤di} 在Si對應(yīng)的控制律Ki保證了系統(tǒng)滿足魯棒穩(wěn)定性和約束條件,即在未來的狀態(tài)變量都局限在Si集合內(nèi),并滿足系統(tǒng)的約束條件。 因此,算法3中,如果狀態(tài)變量在Sh之內(nèi)或在Sh+1之內(nèi),對應(yīng)的控制律Kh,Kh+1可以保證系統(tǒng)滿足魯棒穩(wěn)定性和約束條件。 由于Kh和Kh+1保證了系統(tǒng)的魯棒穩(wěn)定性和約束滿足,因此Kh和Kh+1的凸組合也保證了系統(tǒng)的魯棒穩(wěn)定性和約束條件。因此,利用算法3,可以保證Sh內(nèi)的任何狀態(tài)變量在未來狀態(tài)向更靠近穩(wěn)定點(diǎn)的Sh+1移動(dòng)。 當(dāng)x(k)達(dá)到離線多面體集序列中的最小多面體集Sm內(nèi)部,則由控制律KM保證了Sm內(nèi)系統(tǒng)所有狀態(tài)的魯棒穩(wěn)定性和約束滿足。 考慮具有持續(xù)有界擾動(dòng)的線性變參數(shù)系統(tǒng)的離散狀態(tài)方程為: =Ax(k)+Bu(k)+Dω(k) 其中:0.9≤λ≤1.1 Ω=Cov{A1,A2} 通過橢圓集抗擾動(dòng)魯棒預(yù)測控制算法和多面體集抗擾動(dòng)魯棒預(yù)測控制算法進(jìn)行仿真比較,驗(yàn)證本文算法的有效性。 離線時(shí),根據(jù)狀態(tài)變量的初始值x(0)預(yù)設(shè)的一系列狀態(tài)變量 由算法1得到的控制律 K1=[-0.1250 -0.5506] K2=[-0.1717 -0.6340] K3=[-0.2273 -0.7444] K4=[-0.3272 -0.9165] K5=[-0.5802 -1.1904] 由算法1和算法2得到的系列橢圓集和系列多面體集序列如圖1所示。 圖1 系列橢圓集和多面體集 從圖1中可以看到,采用多面體集序列的可控制區(qū)域明顯大于橢圓集序列的可控制區(qū)域,更符合實(shí)際控制過程中各約束條件。 在線控制時(shí),橢圓集抗擾動(dòng)魯棒控制算法采用內(nèi)插法得到系統(tǒng)的實(shí)際控制律,多面體集抗擾動(dòng)魯棒控制采用算法3得到系統(tǒng)的實(shí)際控制律。狀態(tài)變量控制比較如圖2、圖3所示;控制量的比較如圖4所示。 圖2 狀態(tài)變量x1 圖3 狀態(tài)變量x2 圖4 控制量u 圖2、圖3是狀態(tài)變量在控制過程中的變化曲線,由于系統(tǒng)存在擾動(dòng),狀態(tài)變量趨于穩(wěn)定點(diǎn)后存在波動(dòng)。橢圓集抗擾動(dòng)魯棒控制算法中,狀態(tài)變量在第10個(gè)控制周期趨于穩(wěn)定,多面體集抗擾動(dòng)魯棒控制算法中,由于控制的作用較強(qiáng),狀態(tài)變量在第7個(gè)控制周期趨于穩(wěn)定,控制的快速性和穩(wěn)定性好。 由于系統(tǒng)存在擾動(dòng),圖4中系統(tǒng)的控制量在狀態(tài)變量趨于穩(wěn)定時(shí),不斷抗擾動(dòng)。在每個(gè)控制周期內(nèi),橢圓集魯棒抗擾動(dòng)控制算法中,控制量的控制作用較弱,而多面體集抗擾動(dòng)魯棒控制算法中,控制量的控制作用較強(qiáng),使系統(tǒng)的狀態(tài)變量能夠快速趨于穩(wěn)定點(diǎn)。 通過控制算法的比較,可以看到基于多面體不變集的線性變參數(shù)系統(tǒng)抗擾動(dòng)魯棒預(yù)測控制算法控制作用強(qiáng),更符合實(shí)際控制過程的需求,實(shí)現(xiàn)了系統(tǒng)快速穩(wěn)定控制。 在實(shí)際的控制系統(tǒng)中,系統(tǒng)模型參數(shù)存在不確定性以及受到持續(xù)有界擾動(dòng)的情況,給系統(tǒng)的穩(wěn)定控制造成影響。本文給出基于多面體不變集的線性變參數(shù)系統(tǒng)抗擾動(dòng)魯棒預(yù)測控制算法,一方面可以將線性變參數(shù)的影響顯式地表示出來,另一方面擴(kuò)大了系統(tǒng)的控制可行域,更符合實(shí)際的控制過程。本設(shè)計(jì)算法離線完成大部分的工作量,構(gòu)建離線系列多面體集,得到系統(tǒng)的相應(yīng)的系列控制律;在線時(shí),通過判斷狀態(tài)變量在系統(tǒng)多面體序列中的位置,在相應(yīng)的控制律凸包內(nèi)尋求最優(yōu)的實(shí)際控制律。通過仿真比較,可以看到本算法的控制作用強(qiáng),控制效果好,實(shí)現(xiàn)了系統(tǒng)的快速性和穩(wěn)定性控制,為具有持續(xù)有界擾動(dòng)的線性變參數(shù)系統(tǒng)提供了一種可行的抗擾動(dòng)魯棒模型預(yù)測控制算法。3 離線算法

4 在線算法

5 仿真



6 結(jié)論
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30北京測繪(2020年12期)2020-12-29 01:33:58裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45知識(shí)經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
