一種標(biāo)靶自動控制調(diào)整方法的設(shè)計與仿真
2023-06-01 13:40:54邱李杰張東梅
計算機仿真 2023年4期
邱李杰,張東梅
(長春理工大學(xué)機電工程學(xué)院,吉林 長春 130022)
1 引言
為了更好地模擬實戰(zhàn)場景,無人靶車一般會在路況較差的路面上行駛,在路面激勵作用下,靶車會出現(xiàn)橫向或縱向晃動。縱向晃動不會導(dǎo)致靶車側(cè)翻,但橫向晃動會使標(biāo)靶橫向力超出極限位置,破壞靶車平衡狀態(tài),發(fā)生側(cè)翻,不僅會造成意外事故,還會降低士兵射擊精度,影響訓(xùn)練效果,限制了作戰(zhàn)能力的提高。因此,必須對標(biāo)靶形成有效控制,使其在路面激勵下始終垂直于地面。
標(biāo)靶控制就是對靶車的電機控制,PID(比例-積分-微分)控制理論在該領(lǐng)域已經(jīng)獲得很多成就。例如馬曉陽[1]等人提出基于新型積分分離的PID控制算法。將積分分離和帶盲區(qū)的PID控制算法相結(jié)合,通過控制標(biāo)靶電機的轉(zhuǎn)速與電流閉環(huán),改善靶車震蕩問題。宋昭[2]等人將神經(jīng)網(wǎng)絡(luò)和PID控制相結(jié)合,根據(jù)電機伺服系統(tǒng)工作原理,構(gòu)建同步控制模型,利用前饋神經(jīng)網(wǎng)絡(luò)對該模型求解,獲取控制參量。
PID控制理論雖然較為成熟,但應(yīng)用在標(biāo)靶調(diào)整中依然存在一些問題。例如響應(yīng)速度非常慢,在標(biāo)靶自動調(diào)整初期會存在較大超調(diào)[3],容易造成標(biāo)靶調(diào)整速度低于偏角形成速度,影響穩(wěn)定運行;模糊規(guī)則設(shè)置不合理,控制精度很難滿足要求。基于此,本文利用變論域模糊PID控制算法實現(xiàn)標(biāo)靶自動調(diào)整[4]。變論域即為在規(guī)則不變的條件下,論域隨誤差的減小而逐漸縮小。論域縮小實則為規(guī)則增加,也就是增多了插值結(jié)點,進而提高控制精度。利用這種控制方法通過誤差與變化率的改變對模糊論域范圍作自適應(yīng)調(diào)整,保證標(biāo)靶可以始終垂直于地面。
2 標(biāo)靶傾角生成
2.1 路面激勵模型建立
路面激勵信號可利用白噪聲濾波方式提取[5],此種方法計算簡便,效率高,廣泛應(yīng)用在懸架系統(tǒng)優(yōu)化控制問題中,其數(shù)學(xué)模型表示為

(1)
式中,n0表示空間頻率,f0表示下截止頻率,G0表示不平度常數(shù),V表示靶車行駛速度,w(t)表示白噪聲。通常情況下,路面等級為F級,根據(jù)相關(guān)標(biāo)準(zhǔn)得到各參數(shù)情況如下:n0=0.065536、f0=0.5、V=20。
2.2 傾角生成
當(dāng)受到路面激勵影響時,靶車懸架會產(chǎn)生橫搖,此時標(biāo)靶和大地坐標(biāo)系的Z軸產(chǎn)生偏角,破壞靶車的穩(wěn)定性。將靶車分為關(guān)于橫垂軸完全對稱的兩部分,對其作橫向半車分析。
靶車左右兩側(cè)都有彈簧,將彈簧未形變位置當(dāng)作原點,構(gòu)建標(biāo)靶系統(tǒng)上半部分動力學(xué)微分方程如下
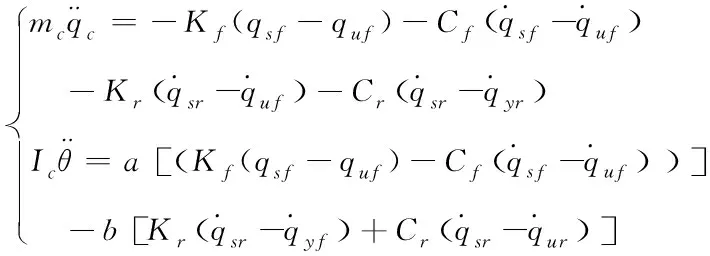
(2)

分析左、右輪胎的動力學(xué)特性,建立標(biāo)靶系統(tǒng)下半部分動力學(xué)微分方程[6]
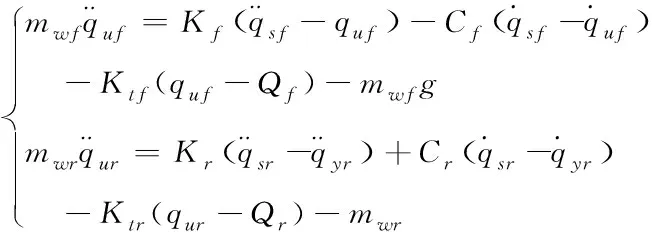
(3)
式中,mwf和mwr分別代表左右非簧載質(zhì)量,Qf、Qr屬于包含激勵的隨機信號,Ktf與Ktr代表左右懸架剛度。
綜合式(2)和(3),計算出路面激勵作用下標(biāo)靶傾角[7]為

(4)
通過分析路面激勵作用,結(jié)合靶車運動學(xué)模型,計算出標(biāo)靶傾角,根據(jù)角度大小,利用控制下述變論域模糊PID控制方法對標(biāo)靶做自適應(yīng)調(diào)整,最大程度減小角度值。
3 基于變論域模糊PID控制的標(biāo)靶自動調(diào)整
3.1 直流電機伺服系統(tǒng)數(shù)學(xué)模型構(gòu)建
標(biāo)靶傾角的調(diào)整依賴直流電機伺服關(guān)系[8],由電流環(huán)、速度環(huán)和位置構(gòu)成閉環(huán)負(fù)反饋變論域模糊PID調(diào)整系統(tǒng)[9]。其中,電流環(huán)處于該系統(tǒng)內(nèi)環(huán),利用輸出環(huán)輸出值對電流環(huán)進行控制,輸出環(huán)則受最外側(cè)的位置環(huán)控制,位置控制則取決于輸入脈沖的占空比。
直流電機是通過換向器完成電磁換向,促進電機正常運轉(zhuǎn),功率越大的伺服系統(tǒng)復(fù)雜度也較高。伺服系統(tǒng)包括控制系統(tǒng)與功率驅(qū)動兩部分[10],其中控制系統(tǒng)由核心電路、通信電路與顯示電路構(gòu)成。作為伺服系統(tǒng)的重要結(jié)構(gòu),控制器可執(zhí)行復(fù)雜的控制算法,同時能完成和上位機通信,達(dá)到遠(yuǎn)程監(jiān)控目的。控制器電路具有狀態(tài)顯示、檢測采樣和隔離等功能。
結(jié)合直流伺服電機的特征與控制過程,構(gòu)建其數(shù)學(xué)模型如下

(5)
式中,S代表電機工作時長,Ke表示反電動勢系數(shù),τm代表機電時間系數(shù),τe是電磁時間系數(shù)。
3.2 變域論模糊PID控制器設(shè)計
利用收縮-擴張因子構(gòu)建逐點收斂差值器[11],促進模糊論域自適應(yīng)擴張,在建立模糊規(guī)則情況下,論域會隨誤差減小而同步縮小,進而提高控制精度。由于標(biāo)靶偏角具有非線性時變特征[12],普通自適應(yīng)控制方法難以做到實時調(diào)整,因此采用變論域模糊PID控制算法,該方法的控制器包括函數(shù)映射和模糊PID控制兩個單元。
其中,控制單元中輸出的物理量表示為ΔKp、ΔKi和ΔKd,利用模糊規(guī)則調(diào)節(jié)這三個參數(shù)。控制輸入則包括如下兩類選擇:與系統(tǒng)有關(guān)的性能指標(biāo)[13],例如超調(diào)量、誤差等;還有一類為反饋誤差e或誤差變化率[14]ec,甚至二者可同時作為輸入。為獲取更加精準(zhǔn)的控制結(jié)果,此處考慮雙輸入情況,將e與ec作為控制單元的輸入量。
模糊PID控制系統(tǒng)包括三層,最頂層是差值器,經(jīng)過差值運算,獲取e與ec的伸縮因子a1(t)與a2(t),并將結(jié)果傳輸?shù)秸K;中間層是模糊整定模塊,通過模糊推理獲取控制參數(shù)增量ΔKp、ΔKi和ΔKd;最下層為加法計算器與控制器,可根據(jù)具體控制量,執(zhí)行相應(yīng)調(diào)整動作。控制系統(tǒng)整體結(jié)構(gòu)如圖1所示。
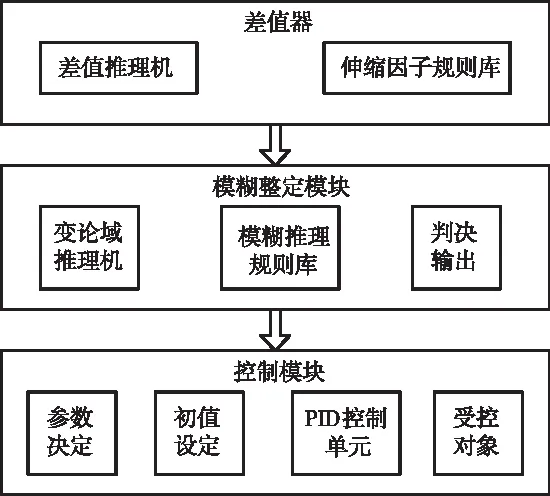
圖1 控制系統(tǒng)整體結(jié)構(gòu)圖
模糊控制器是標(biāo)靶控制系統(tǒng)的核心,詳細(xì)設(shè)計步驟如下:根據(jù)輸入變量的數(shù)量分類,可分為單變量與多變量控制器。其中,前者的輸入與輸出變量只有一個,后者則有多個物理量。由于是基于PID控制,因此需設(shè)計一種多變量控制器,該控制器的主要結(jié)構(gòu)包括:
1)模糊接口:能夠?qū)⑤斎肟臻g中的精確量變換在模糊劃分上,通過隸屬度函數(shù)獲取精確量與各類模糊集間的隸屬度。
2)推理機:是控制器的核心設(shè)備,結(jié)合接口輸出的模糊量,確定控制規(guī)則,再通過模糊運算,生成最終控制量。
3)判決接口:推理機輸出的是模糊量,但被控目標(biāo)只能識別精確量,所以需通過量化方式將模糊集變換為精確數(shù)值。
4)知識庫:含有控制系統(tǒng)與被控對象的相關(guān)知識,由函數(shù)庫、規(guī)則庫與方法庫構(gòu)成。其中,函數(shù)庫可儲存輸入、輸出論域中的所有隸屬度函數(shù);規(guī)則庫中包括各類專家知識,能夠生成控制規(guī)則;方法庫可實現(xiàn)清晰化計算。
3.3 模糊規(guī)則
控制器的穩(wěn)定運行離不開控制規(guī)則[15],這些規(guī)則就是將偏差e與偏差變化率ec當(dāng)作輸入信號,構(gòu)建對應(yīng)的Kp、Ki與Kd規(guī)則:
1)如果|e|較大,為提高控制系統(tǒng)響應(yīng)速度,應(yīng)保證Kp較大與Kd較小,同時確保Ki=0,避免出現(xiàn)過大超調(diào);
2)如果|e|為中等大小,應(yīng)確保Kp較小,且Ki、Kd的值適當(dāng);
3)如果|e|較小,為避免系統(tǒng)出現(xiàn)震蕩,需結(jié)合|ec|的大小確定Kd,當(dāng)|ec|值較大時,Kd值較小,其它情況下Kd值適中即可。
模糊控制規(guī)則是控制器很好完成標(biāo)靶調(diào)整工作的關(guān)鍵,在輸出控制U上設(shè)定模糊子集表示為{NB,NM,NS,ZO,PS,PM,PB},它們分別對應(yīng){負(fù)大,負(fù)中,負(fù)小,零,正小,正中,正大}。綜上所述,本文設(shè)計的模糊控制規(guī)則分別如表1-3所示。
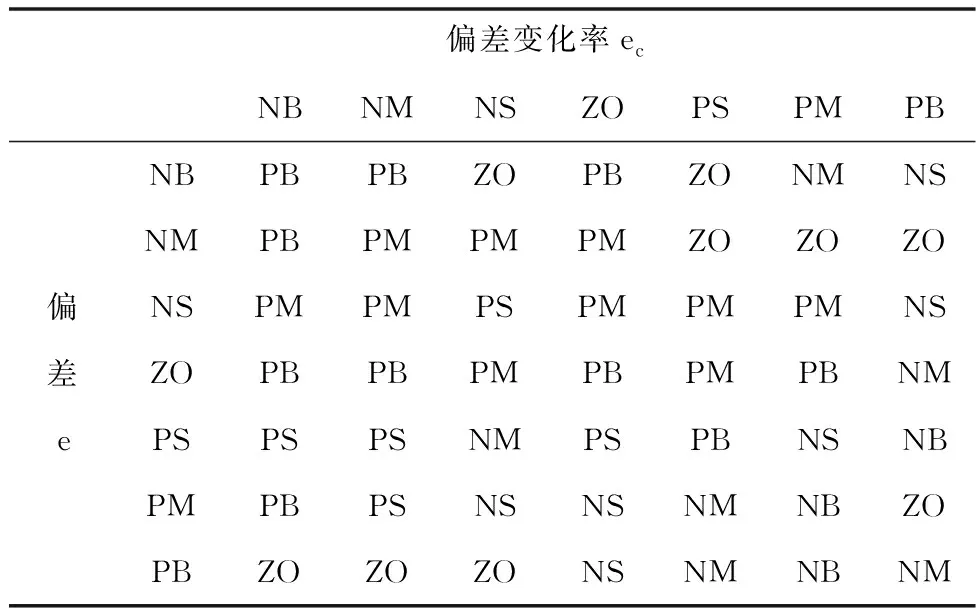
表1 ΔKp模糊控制規(guī)則表
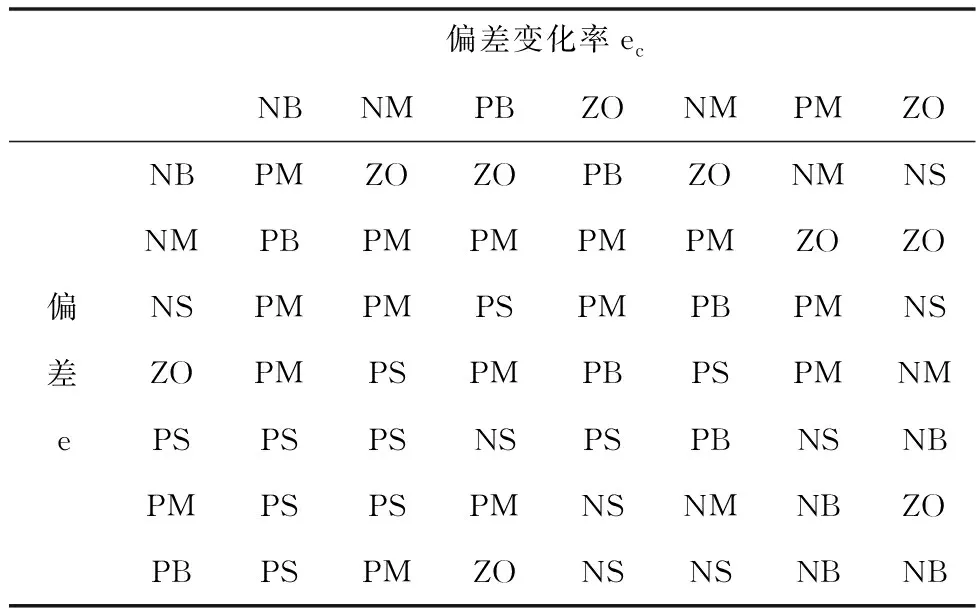
表2 ΔKi模糊控制規(guī)則表
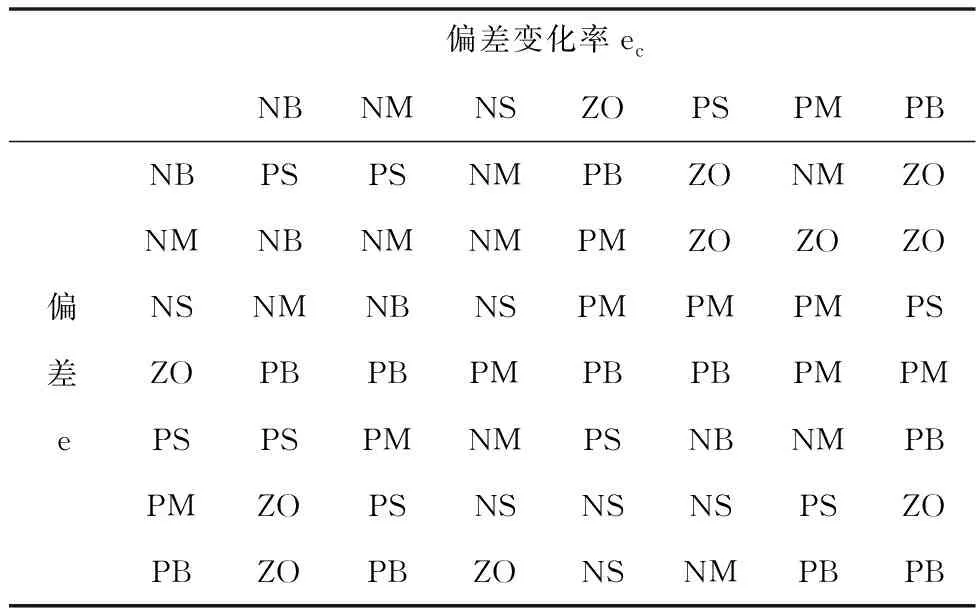
表3 ΔKd模糊控制規(guī)則表
3.4 模糊決策控制與量化
確立模糊規(guī)則后,需利用合適的推理算法完成模糊決策。推理過程的實質(zhì)就是模糊集合變換,即隸屬函數(shù)演變過程。如果將e和ec當(dāng)作控制器輸入量,根據(jù)模糊關(guān)系R即可獲得模糊控制輸出U
U=(e×ec)·R
(6)
上述獲得的輸出結(jié)果為模糊集合,其隸屬度函數(shù)具有分段且不規(guī)整特征,所以需將其變換為精準(zhǔn)控制量,再將該量傳輸?shù)綀?zhí)行機構(gòu),該過程為清晰化判決過程,也是模糊到清晰空間的映射。

(7)
該方法直觀簡便,可以呈現(xiàn)出模糊集中包括的全部信息,同時可將這些信息全部量化,變?yōu)榫唧w控制值,當(dāng)控制器接收到這些量化值后,給出相應(yīng)調(diào)整方案,實現(xiàn)標(biāo)靶自動調(diào)整。
4 仿真數(shù)據(jù)分析與研究
為證明所提自動調(diào)整方法性能,將野外靶車作為實驗?zāi)繕?biāo)完成仿真。在靶車車架上安裝傾角傳感器,將傾角數(shù)據(jù)反饋到控制器,控制器則負(fù)責(zé)信號計算和處理。仿真系統(tǒng)模型如圖2所示。具體仿真參數(shù)見表4。
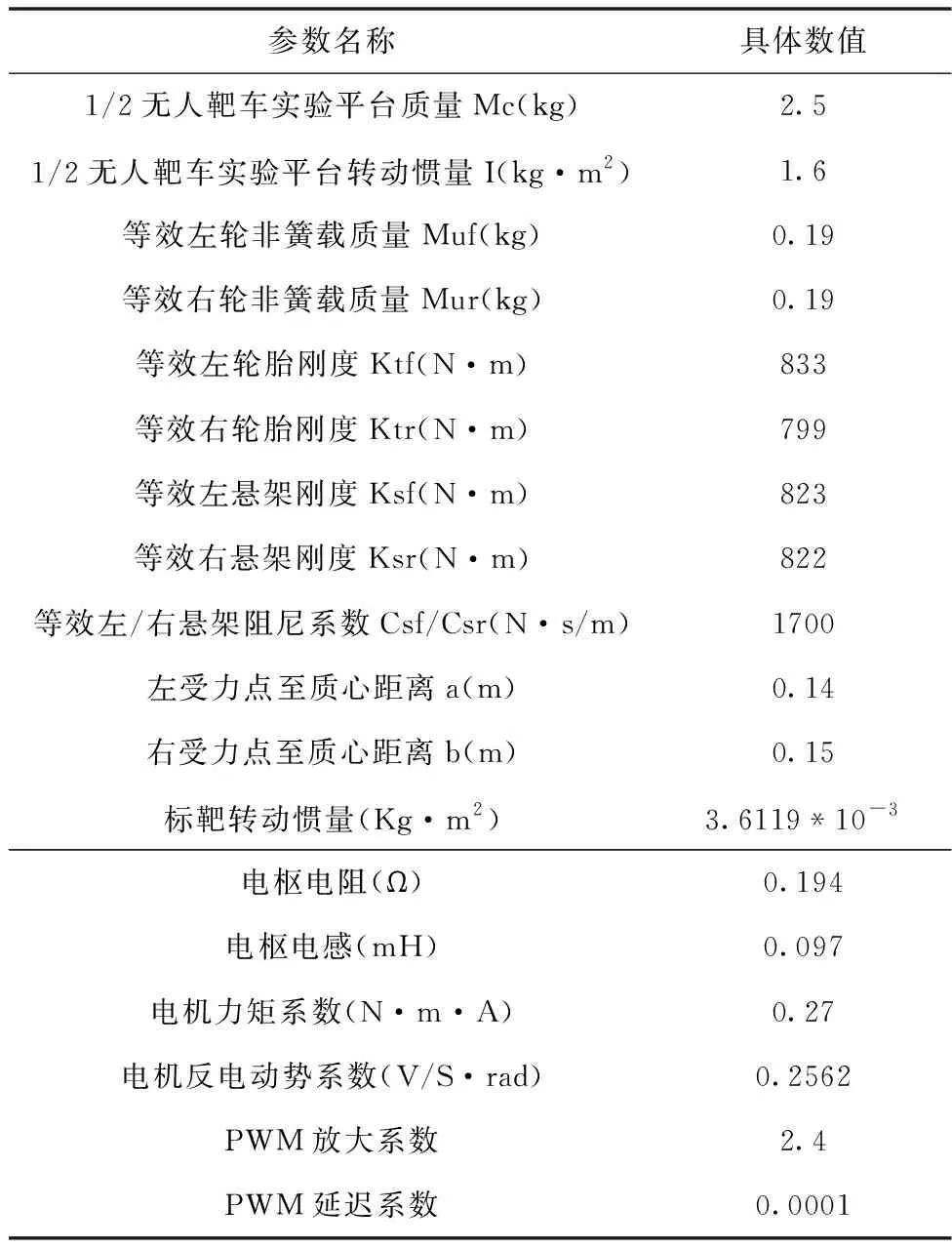
表4 仿真參數(shù)表
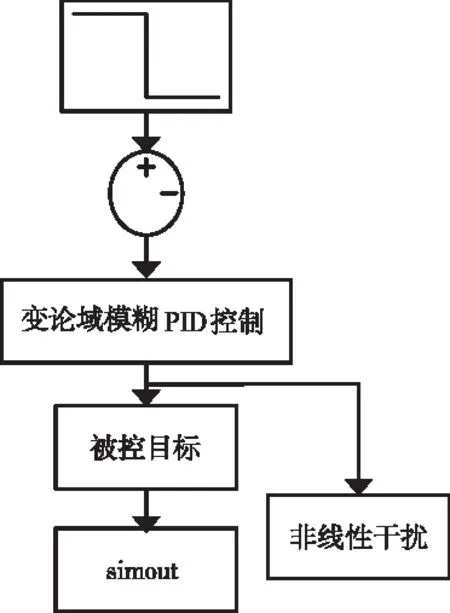
圖2 仿真系統(tǒng)模型示意圖
基于上述仿真環(huán)境,階躍信號設(shè)置為1,引入幅值是3的方波,驗證所提調(diào)整方法的跟隨與抗干擾性能。假設(shè)仿真時間為7s,步長為0.0001S,將本文測試結(jié)果和新型積分分離PID控制、神經(jīng)網(wǎng)絡(luò)PID控制進行對比,得到的響應(yīng)曲線如圖3所示。
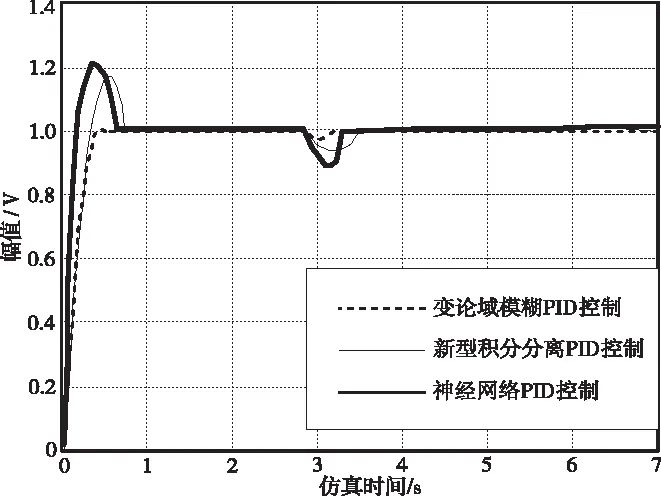
圖3 不同控制方法的響應(yīng)曲線
由圖3能夠看出,本文提出的變論域模糊PID控制能夠在最短時間內(nèi)達(dá)到穩(wěn)定狀態(tài),穩(wěn)態(tài)誤差非常小。當(dāng)仿真時間為3s時,受到方波干擾,所提方法的波動量最少,恢復(fù)所需時間也最少。而積分分離PID控制方法雖然沒有神經(jīng)網(wǎng)絡(luò)算法能量波動幅度大,但恢復(fù)時間較長。綜合而言所提方法的響應(yīng)曲線最優(yōu),具備較強的抗干擾性能。
再將仿真時間設(shè)置為70s,步長不變,將標(biāo)靶和垂直平面偏角為0°當(dāng)作自動調(diào)整目標(biāo),分別在道路平坦和路況較差的訓(xùn)練場地中進行測試,則上述三種方法的調(diào)整結(jié)果如圖4和圖5所示。
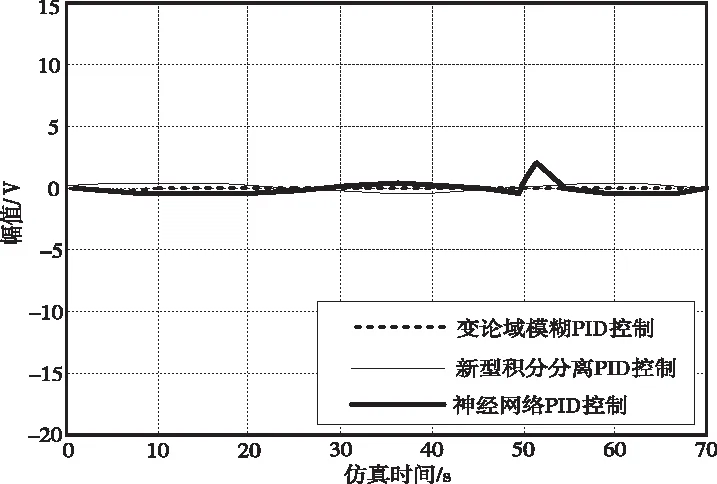
圖4 道路平坦場地下的測試結(jié)果圖
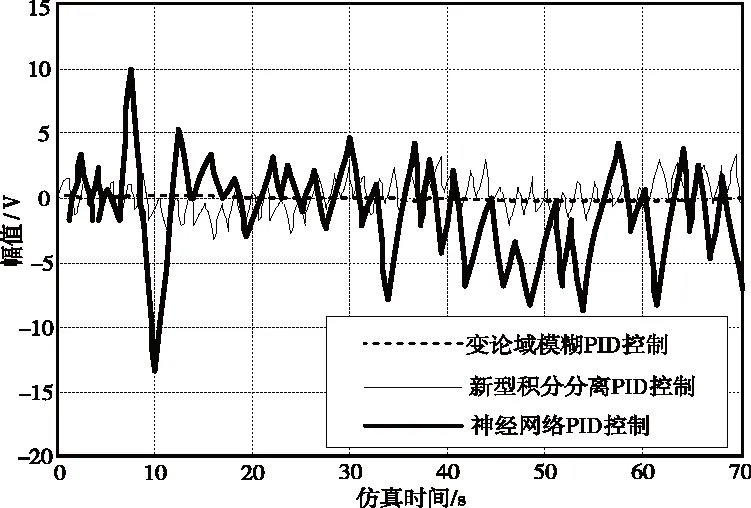
圖5 路況較差場地下的測試結(jié)果圖
分析圖4和5可知,當(dāng)?shù)缆菲教箷r,在三種不同算法控制下,都能將偏角調(diào)整到接近0°的位置,其中所提方法的偏角曲線和0°曲線最為吻合,產(chǎn)生的誤差可以忽略不計,這種較小的誤差是無法避免的,大小由設(shè)備性能參數(shù)決定。當(dāng)路況非常復(fù)雜時,本文方法依舊保持著較高的自動調(diào)整能力,偏角幅值在整個實驗過程中都保持在可控范圍內(nèi),但是神經(jīng)網(wǎng)絡(luò)算法的角度幅值忽高忽低,極其不穩(wěn)定。這是因為,變論域模糊控制器結(jié)構(gòu)和模糊規(guī)則設(shè)計合理,保證在該控制方法下標(biāo)靶能夠自適應(yīng)調(diào)整角度,與地面保持垂直關(guān)系。
5 結(jié)論
針對靶車運行不穩(wěn)定問題,提出基于變論域模糊PID控制的靶車自動調(diào)整方法。探究了路面激勵對靶車傾角產(chǎn)生的影響,設(shè)置了變論域模糊控制系統(tǒng)和控制器結(jié)構(gòu),按照固定的控制規(guī)則,完成模糊量的量化處理,計算出控制參數(shù),根據(jù)該參數(shù)即可實現(xiàn)標(biāo)靶自動調(diào)整。仿真結(jié)果證明,所提方法能夠快速調(diào)整標(biāo)靶傾角,使其回歸理想值。但是在實驗過程中,應(yīng)注意操作的規(guī)范性,任何一點操作失誤均會影響調(diào)整精度,應(yīng)最大程度減少主觀誤差。
猜你喜歡
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數(shù)學(xué)小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
兒童故事畫報(2019年5期)2019-05-26 14:26:14
幸福(2018年33期)2018-12-05 05:22:42
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學(xué)報(哲學(xué)社會科學(xué)版)(2016年9期)2017-01-15 13:52:02
中國科技信息(2016年14期)2016-07-31 21:16:32
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
