基于預測模型的事件觸發控制
2023-05-31 09:14:00梁家豪唐予軍
計算機仿真 2023年4期
梁家豪,唐予軍,王 霞
(河北大學電子信息工程學院,河北 保定 071002)
1 引言
在過去的幾十年里,網絡控制系統在無人機飛行器,智能交通系統,遠程機器人,遠程手術的方面得到了廣泛的應用[1],使學者們對其產生了濃厚的興趣。網絡控制系統具有很多優點,如成本低,便于安裝和維護,信息容易共享等。但是,不可靠的通信網絡和有限的帶寬會導致網絡的通信延遲和數據丟包等問題[2],這些問題會對控制性能產生不利影響,甚至會使整個網絡控制系統不穩定[3]。
由于現代科學技術的發展,數據量和信息量成爆炸性增長。使用傳統的時間觸發控制方法[4],會使在有限的網絡帶寬資源上產生數據傳輸的冗余,而這些冗余數據對于網絡系統的性能是無用的。當基于數據包的傳輸以時間觸發的方式實現的時候,就會占用更多的帶寬資源,而且在有限的通信資源上進行爆炸性的數據傳輸時,可能會導致網絡控制系統性能惡化。處理這類問題的一個有效的方法是使用事件觸發[5],就是只有在系統狀態超出預定閾值時才使用網絡。文獻[6]詳細的介紹了自觸發方案、離散事件觸發方案、自適應事件觸發方案等一系列的事件觸發方案和相應的模型建立方法。文獻[7]研究了事件觸發機制更新控制和估計的頻臨問題。文獻[8]中提出了一種基于采樣狀態的事件觸發控制和一種基于采樣的自觸發控制方法,并根據當前采樣數據預測下一個控制任務觸發的時間。通過事件觸發的方式,可以在很大程度上減少網絡的通信負擔,同時保證系統的閉環性能[9,10]。
同時,由于通訊協議的限制,延遲的影響在網絡控制系統中被廣泛關注[11]。文獻[12]構造一種新的Lyapunov-Krasovskii泛函研究了網絡延遲下事件觸發控制器的設計方法。另外,文獻[13]研究一種事件觸發的網絡化預測控制方法來解決網絡通信延遲帶來的影響。文獻[14]中提出了網絡預測控制方法,使用預測器來主動補償網絡引起的通信延遲和數據丟包,并實現了預期的控制效果。文獻[15]在切換線性系統中,利用預測器解決了事件觸發控制中網絡系統存在的延遲問題。文獻[16]中,Yang等人提出了一種事件觸發的預測控制方法來穩定網絡控制系統,在保證閉環系統穩定的前提下,提供了最大的觸發間隔。文獻[17]提出了一種新型的網絡控制系統結構,在傳感器設備和控制器設備上都設置了事件觸發機制,以減少反饋網絡流量,通過預測被控對象的未來狀態,設計了一種新的數據包形式,其中包含未來控制輸入信號的序列及其相應的動作時間,以主動補償網絡延遲和數據包丟失的影響。在文獻[18]中,提出了一種新的事件觸發機制和網絡化預測控制方法的組合,以節省有限的網絡資源并主動補償網絡通信延遲。在上述文獻中均使用系統當前狀態設計觸發機制,并且假設系統在觸發后可以立即得到相應的控制信號,但這在實際的網絡控制系統中是不能滿足的。由于控制器到被控對象之間的網絡延遲,系統狀態滿足觸發條件時,無法獲得當下的控制信號,從而會使系統狀態無法即刻發生改變,而是在相應的延遲時間后才會得到控制信號從而發生變化,這就會導致系統狀態超過所設定的觸發條件,使系統狀態無法達到預期的控制目標。其仿真結果如圖1,圖2所示。圖1表示系統使用當前狀態設計觸發機制,未考慮網絡雙延遲情況下,狀態的改變較觸發時刻晚; 圖2表示本文使用系統未來狀態設計觸發機制,使系統提前觸發,則在觸發時刻系統狀態即可發生變化。而如何應對控制器到被控對象之間的網絡延遲影響,確保達成控制目標尚未見相關研究。
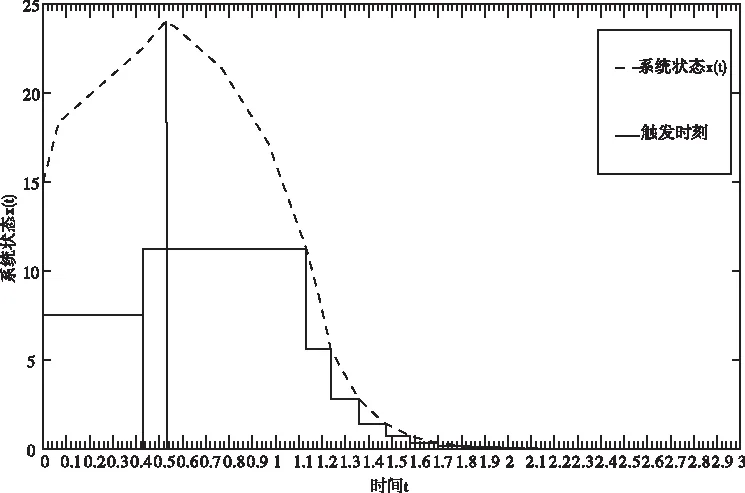
圖1 利用系統當前狀態設計觸發機制

圖2 利用系統未來狀態設計觸發機制
如圖1所示,系統在0.42s發生觸發,但是系統卻在0.52s才得到相應的控制信號,那么在0.42s到0.52s這個時間段內,系統狀態的增長便超出了所設定的預值,從而導致無法達到預期的控制目標。而圖2利用本文所設計的觸發機制,系統就可以在觸發時刻獲得相應的控制信號,從而即刻發生改變。
本文提出一種基于預測模型的事件觸發控制結構,將模型預測器放在被控對象側,并且利用預測的未來狀態設計一種新的事件觸發機制,用于消除網絡系統中通信雙延遲帶來的不利影響。預測器預測出系統總延遲時間后的未來狀態,并使用系統的未來狀態設計相應的事件觸發機制,使系統在達到觸發條件之前進行觸發并計算對應的控制律,從而確保系統達到觸發條件時,可以得到即刻的控制信號,消除網絡通信延遲帶來的影響。本文具體貢獻如下:
1)將預測器放置在系統被控對象側,利用預估狀態設計一種新的觸發機制,提前觸發,消除控制器到對象之間的網絡延遲影響。
2)考慮系統狀態不可測穩態,首先設計系統的狀態觀測器,然后使用觀測到的狀態設計模型預測器。
3)利用擴維技術證明系統的穩定性,并證明系統不存在Zeno行為。最后通過仿真驗證此方法的有效性。
2 問題描述
考慮以下線性系統

(1)
其中x(t),u(t),y(t)分別表示系統的狀態,輸入和測量輸出,A∈Rn×n,B∈Rn×m,C∈Rm×n為已知系數矩陣,h表示系統的總延遲時間,基于預測模型的事件觸發控制網絡結構如圖3所示。

圖3 基于預測模型的事件觸發控制網絡結構圖
假設1 系統矩陣(A,B)是可控的,(A,C)是可觀測的。
在網絡系統中控制器側的通信延遲為Δ1,控制器到被控對象側的通信延遲為Δ2,系統的總通信延遲為h=Δ1+Δ2,并且假設通信延遲時間已知。
本文通過設計系統的狀態觀測器,利用觀測狀態設計系統的模型預測器,使用預估的未來狀態設計新的事件觸發機制和相應的控制器,使存在雙延遲的網絡控制系統鎮定。
3 主要成果
在這一章,首先給出狀態觀測器的設計,利用狀態觀測器觀測系統的狀態,然后設計系統的模型預測器,并使用系統未來狀態設計出相應的事件觸發機制,最后證明系統的穩定性并且證明系統不會發生Zeno行為。
3.1 觀測器設計
首先,構造系統的狀態觀測器如下
(2)

令觀測誤差為

(3)
則有

(4)
可以得到

(5)
接下來的引理證明給出的狀態觀測器能漸近估計其系統狀態。
引理1:考慮系統(4),如果存在R>0和X=RL,滿足
ATR-CTXT+RA-XC<0
(6)
則觀測器系統是漸近穩定觀測器,觀測增益設計為L=R-1X。
證明:
取李雅普諾夫函數V(t)=eT(t)Re(t)
求導可以得到:

(7)
故意味著,所給出的狀態觀測器為漸進穩定觀測器。
3.2 預測器設計
接下來,用觀測器觀測到的系統狀態設計預測器,預測出總延遲時間h之后的系統狀態。
系統(1)的解為:

(8)
故得出未來狀態:

(9)
據此,構造預測器,利用觀測狀態來預測系統未來狀態:

(10)
3.3 事件觸發機制和控制器設計


(11)
其中

(12)

(13)
使用預測器預測的系統未來狀態來判斷是否滿足觸發條件,在滿足觸發條件時,系統提前觸發,從而避免了網絡通信延遲對系統帶來的不利影響。
基于事件觸發策略,將控制器設計為
(14)
其中K為反饋增益。

3.4 穩定性分析
最后,將證明帶通信延遲的網絡系統在基于模型預測的事件觸發控制下的穩定性。
由于在每個觸發時間段中u(t)為常數,故系統的預測器可計算為

(15)
則可以得到系統的觀測狀態表示為
(16)
對(15)式求一階導數得到


(17)
聯立(4)和(17)得到

(18)
將(18)式寫成

(19)
其中
定理1 考慮系統(19),如果存在矩陣M>0,N,使
(20)
其中
=MAT+NTBT+AM+BN
(21)
則系統是漸近穩定的。
證明


=ξT(t)Qξ(t)<0
(22)
其中

(23)
Q′=ATP+KTBTP+PA+PBK+PBKKTBTP+σI
令Q<0,則系統為漸近穩定的。
利用Schur complement引理可以得到
(24)
在上式兩邊乘diag{P-1,P-1,I},令M=P-1,N=KM,則有
(25)
再利用Schur complement引理可以得到
(26)
則控制器增益可以通過解LMI獲得,K=NM-1。
在事件觸發控制中,系統是否會出現Zeno現象一直是學者們的關注點。因此,接下來討論了系統的Zeno行為,證明了系統的事件觸發間隔是無Zeno行為的。
(27)

證明:


(28)
其中


(29)
的解。
解方程(29)可以得到

(30)
又由事件觸發條件(11)得到
(31)
則事件觸發間隔時間滿足

(32)
則:

(33)

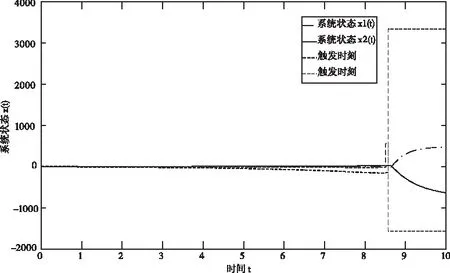
1)當m>n時:
2)當m 綜上,系統事件觸發間隔時間存在正下界τ>0。 在這一章,給出一個數值例子來說明本文所設計的基于模型預測的事件觸發控制的有效性。 考慮以下線性系統 其中 則通過仿真得到基于模型預測的事件觸發控制的系統輸出如圖4所示。 圖4 基于模型預測的事件觸發控制的系統輸出 作為對比,無預測器的系統輸出如圖5所示。 圖5 無預測器的事件觸發控制系統輸出 通過上述兩圖可以看出,對于帶有通信延遲的網絡系統,加上本文所設計的預測器后,可以使系統鎮定。 本文研究了基于預測模型的事件觸發控制的問題,即受網絡通信雙延遲影響的網絡控制問題。首先設計了系統的狀態觀測器,接著在系統被控對象側設計了模型預測器來預測系統未來狀態,然后利用預測的系統未來狀態設計了相應的事件觸發機制,使系統提前觸發并計算對應的控制率,給控制器留出了時間裕量,使系統狀態在觸發時刻可以即刻得到相應的控制信號。消除了網絡通信延遲帶來的不利影響,最后通過擴維技術證明了系統的穩定性,并且證明了系統不存在Zeno行為。并且通過仿真實例說明了基于預測模型的事件觸發控制的有效性。4 仿真研究


5 結論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
