仿真設備對引進空空導彈仿真系統設計的影響
2023-05-31 09:13:46石瑋瑋劉志永李灌華李曉峰
計算機仿真 2023年4期
石瑋瑋,劉志永,李灌華,李曉峰
(中國人民解放軍第5715工廠,河南 洛陽 471009)
1 引言
半實物仿真系統作為導彈武器系統型號研制和試驗鑒定過程中一個重要環節,可以在實驗室條件下檢驗導彈各組件的技術狀態和組件間協同工作的可靠性,評估導彈制導控制系統的性能,驗證導彈抗干擾能力,在導彈武器系統研制中發揮著重要的作用。隨著仿真技術發展和應用拓展,半實物仿真系統開始應用于引進空空導彈修后質量和性能的評估驗證中,解決引進空空導彈故障快速定位、動態測試考核、邊界作戰能力摸底及靶試保障分析等問題,在引進空空導彈的修理保障中也將發揮著重大作用。隨著半實物仿真系統作用越來越突出,在設計仿真系統時,需對設備指標和精度需進行分析研究。
飛行轉臺和天線陣列是引進空空導彈半實物仿真系統重要設備,分別提供導彈角運動和目標角運動環境。引進空空導彈導引頭主要通過測角和測速來完成對目標的跟蹤,因此飛行轉臺和天線陣列相關指標對引進空空導彈半實物仿真系統設計會具有重大的影響。楊黎都等從三軸轉臺動態性能方面分析了對半實物仿真的影響;馬炎等從微型三軸轉臺的角位置精度進行了分析。以上研究側重于轉臺的指標對仿真系統的影響,需結合目標天線陣列的指標進一步進行研究,且引進空空導彈的設計資料有限,這些在仿真系統設計時都需要考慮。
本文從引進空空導彈半實物仿真系統角位置模擬原理出發,建立飛行轉臺和天線陣列的角位置模擬模型;結合引進空空導彈仿真系統設備指標,建立飛行轉臺和天線陣列的傳遞函數模型,構建引進空空導彈控制回路模型,詳細分析飛行轉臺和目標天線陣列的角位置精度、頻響特性對半實物仿真系統的影響,為引進空空導彈的半實物仿真系統建設提供科學的理論依據。
2 設備對半實物仿真系統設計影響原理
引進空空半實物仿真系統為導彈攻擊目標的整個過程構建一個工作環境,由多個仿真設備組成,仿真系統結構如圖1所示。
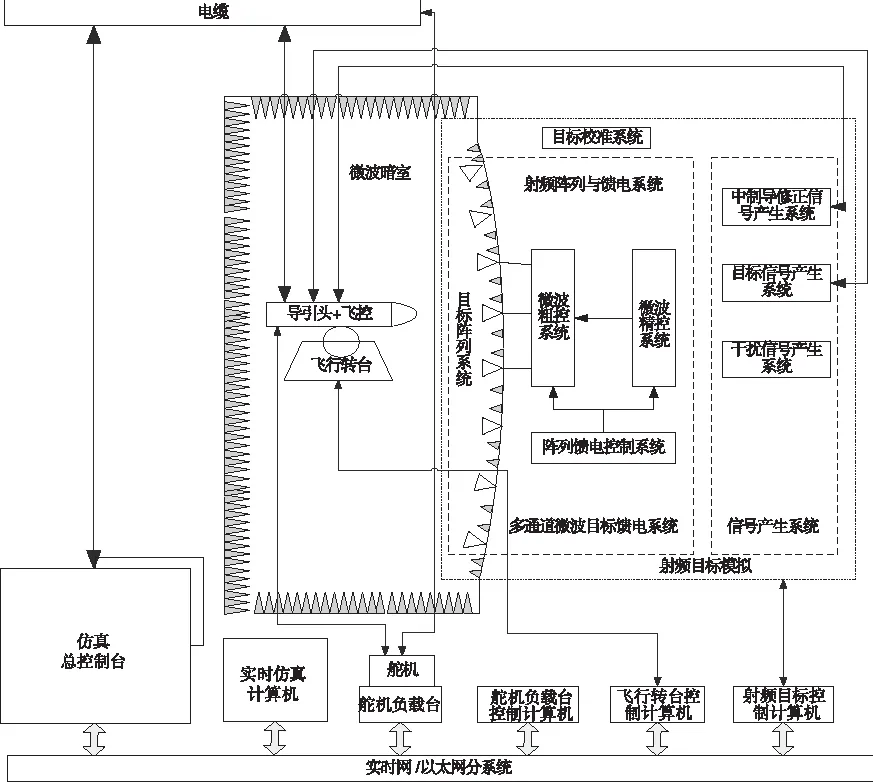
圖1 仿真系統結構圖
在仿真過程中,飛行轉臺上面放置被測試的導引頭和飛控組件,測試過程中飛行轉臺控制計算機接收仿真計算機解算的導彈飛行過程中的姿態運動,并通過飛行轉臺的臺體框架的旋轉,復現導彈的飛行姿態,如俯仰角?,偏航角ψ,滾轉角γ。
天線陣列是若干個天線按三元組的規律排列成一定曲率的輻射天線陣,測試過程中目標控制計算機接收仿真計算機解算的目標飛行過程中的運動軌跡,并通過指定的三元組輻射出去,復現目標的飛行姿態。目前國內陣列三元組角位置控制算法都是采用三元組相位配平,通過幅度控制來實現目標在三元組內的合成位置,可利用重心公式對目標位置進行控制。
式中:(φ,θ)是等效合成輻射中心的在陣列面坐標,E1、E2、E3是三元組三個天線陣元饋電的幅度,(φ1,θ1)、(φ2,θ,2)、(φ3,θ,3)是三元組三個天線在陣列面的坐標。
在引進空空導彈半實物系統工作過程中,導引頭應處于飛行轉臺回轉中心,所指的發線方向應正對目標的三元組理論合成點,但由于機械磨損、飛行轉臺軸系精度、安裝誤差、天線陣列精度指標、安裝誤差等因素影響,導引頭往往不能處于轉臺的回轉中心位置,指向也不能精確指向天線陣列理論合成點,會產生角度誤差。更為重要的是,引入飛行轉臺和天線陣列系統后,相當于在導彈控制系統中引入了飛行轉臺和天線陣列等模型環節,飛行轉臺和天線陣列的性能會直接對引進空空導彈制導控制系統造成影響。
3 設備對半實物仿真系統設計影響建模與分析
3.1 設備對半實物仿真系統角度誤差模型建立
如圖2所示,導引頭在飛行轉臺的位置為A,轉臺的回轉中心為O,天線陣列某個三元組的幾何中心為F,B為目標實際計算位置,B′為目標輻射信號位置,新建一個坐標系,以OF連線為Y軸,Z軸垂直Y軸向上,X軸與Y、Z軸符合右手定則。
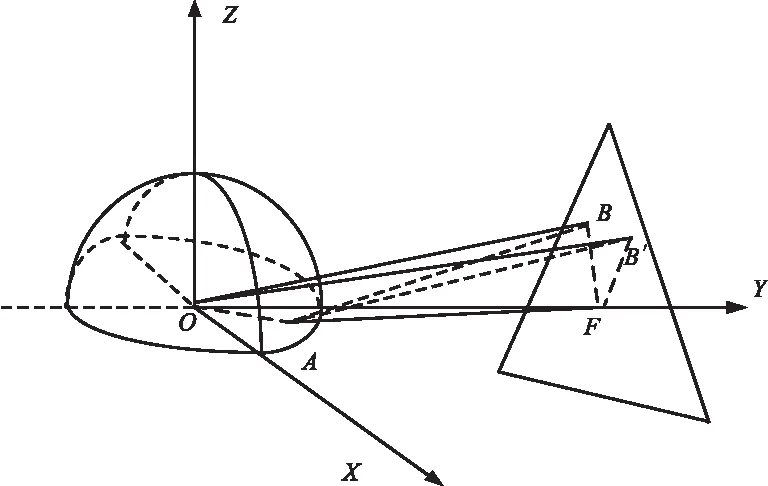
圖2 飛行轉臺中心與天線陣列三元組相對關系示意圖
假設導引頭在飛行轉臺位置A與回轉中心O的距離為D,天線三元組內B,B′,F到轉臺回轉中心O的距離為R,則目標信號的計算位置B相對于回轉中心O的俯仰角為α0,方位角β0,目標信號的實際輻射位置B′相對于導引頭所在位置A的俯仰角為α1,方位角β1,則俯仰角和方位角的角度誤差為
Δα=α1-α0
Δβ=β1-β0
(1)
圖2可知,A點的球坐標系的坐標為(D,θ0,φ0),B點的球坐標系的坐標為(R,θ1,φ1),B′點的求坐標系的坐標為(R,θ2,φ2),設A點直角坐標為(x0,y0,z0),B點直角坐標為(x1,y1,z1),B′點直角坐標為(x2,y2,z2),則有
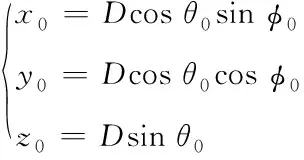
(2)
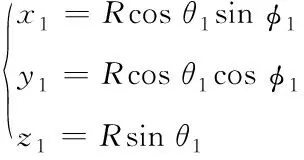
(3)
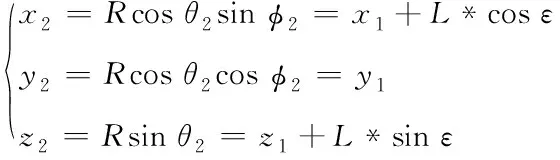
(4)
式中,L為三元組內B和B′的間距,ε為BB′連線與水平線的夾角。
通過圖2可以看出,目標信號的計算位置B相對于回轉中心O的俯仰角為α0,方位角β0為
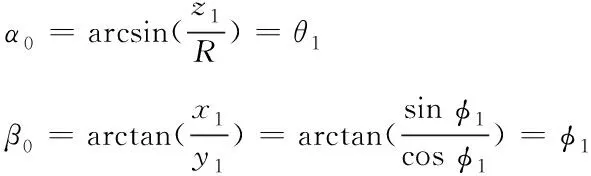
(5)
目標信號的計算位置B′相對于轉臺實際位置A的俯仰角為α1,方位角β1為
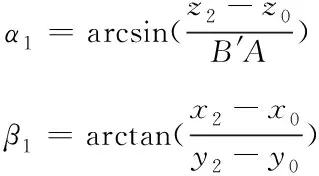
(6)
其中
飛行轉臺和天線陣列所產生側向角度誤差即目標角度測量值α1(β1)與目標角度的真實值α0(β0)的差。
3.1 設備對半實物仿真系統設計頻響模型建立
3.1.1 飛行轉臺的頻響模型
目前國內的飛行轉臺指標通常用“雙十指標”來衡量,即飛行轉臺的閉環控制系統相位滯后10度和幅值誤差小于10%時的頻率值ωs,即
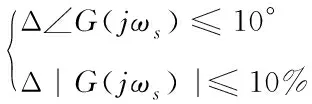
(7)
飛行轉臺作為角度隨動系統,它不是一個理想的伺服運動機構,其傳遞函數含有高階模型,為了便于問題描述,工程上通常用二階系統頻響特性近似飛行轉臺的高階模型系統,假設飛行轉臺的閉環傳遞函數為
(8)
根據二階控制系統的頻率特性可知,飛行轉臺閉環系統相頻特性為
(9)
飛行轉臺閉環系統幅頻特性為
(10)
將ωs帶入式(9)、(10)中,滿足式(7),可得到滿足飛行轉臺幅頻特性和相頻特性關系滿足雙十指標時,則有
(11)

(12)
在雙十指標頻率值ωsωs確定的情況下,且取式(11)、式(12)中固有頻率ωn較小值,即可求得飛行轉臺的固有頻率ωn,同時在工程應用設計中,轉臺阻尼ξ一般取值為0.4~0.8之間,則可求出飛行轉臺閉環二階傳遞函數。
某引進空空導彈仿真系統建設時,確定飛行轉臺設備的指標如表1所示。
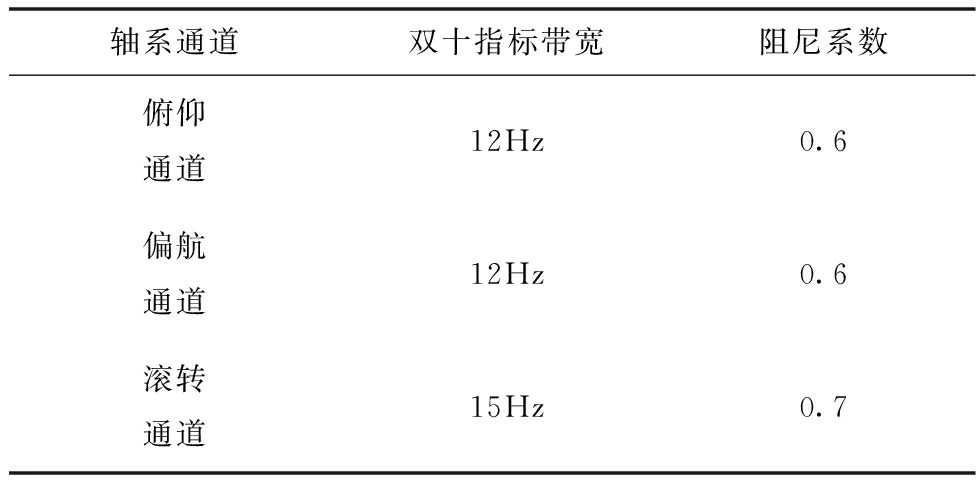
表1 飛行轉臺設備指標
取俯仰通道雙十指標帶寬ωs=12Hz,阻尼比ξ=0.6,根據式(11)、(12)求出相應參數代入式(8)可求出轉臺俯仰通道閉環二階傳遞函數為

(13)
3.1.2 天線陣列的頻響模型
天線陣列設備作為一個復雜的射頻系統,主要是將目標的角位置以一定的準確性和處理周期輻射出去供導引頭接收,主要包括目標陣列系統和陣列饋電控制系統。目標陣列系統主要是微波天線和六自由度裝置及附屬的支撐結構組成,用以呈現目標信號角位置移動;陣列饋電控制系統主要包括精位控制和粗位控制及相關的控制軟硬件,其中精位控制主要是通過程控移相器控制三元組中的每個輻射天線輻射信號的相位,使之在目標陣列球面陣坐標系原點上的相位相等,這樣三元組三個輻射天線輻射信號的能量中心便是等效目標輻射中心的位置;粗位控制系統主要實現目標輻射信號在不同三元組之間的選擇。由于天線陣列設備復雜,組成較多,為了便于問題的描述和研究,可將天線陣列設備處理成一個欠阻尼的二階系統,存在輸入和輸出信號超調量和系統延遲時間,用二階系統的時域特性來近似整個天線陣列設備的時域響應,則天線陣列設備的傳遞函數如下
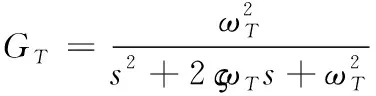
(14)
根據二階系統的時域特性分析,天線陣列設備的超調量σ可表示為

(15)
二階系統時域動態過程分析時,峰值時間、超調量、上升時間可用系統的阻尼?和系統的自然頻率ωT準確表示,系統的延遲時間td和調節時間ts很難用系統的阻尼?和系統的自然頻率ωT來解析表示,在工程上通常近似的方法來表達,td可表示為
(16)
某引進空空導彈仿真系統建設時,確定天線陣列設備的指標如表2所示。

表2 天線陣列設備技術指標
取天線陣列超調量為σ=2%,系統延遲時間td=100μs,根據式(15)、(16)求出相應參數帶入式(14)中可求出天線陣列設備的二階傳遞函數為

(17)
3.1.3 仿真設備對引進導彈控制系統影響
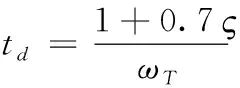
飛行轉臺和天線陣列作為引進空空半實物仿真系統的重要設備,要想研究其對導彈的性能影響分析,就必須先對導彈控制系統特性進行分析,以某引進空空導彈俯仰通道為例,如圖3所示,該控制系統采用三回路控制,利用參數空間法來設計控制系統,求得控制系統的參數Km,K0,K1,以實現彈體穩定,進而實現對目標穩定跟蹤。
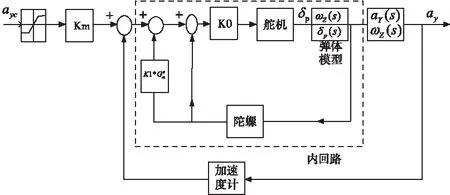
圖3 引進空空導彈控制系統結構框圖
引入飛行轉臺和天線陣列的傳遞函數引入導彈控制系統內回路后,其結構如下圖所示。
上述圖3、圖4中,給出以俯仰舵偏角為輸入,俯仰角速度為輸出的數學模型及以俯仰角速度為輸入,法向過載為輸出的數學模型為
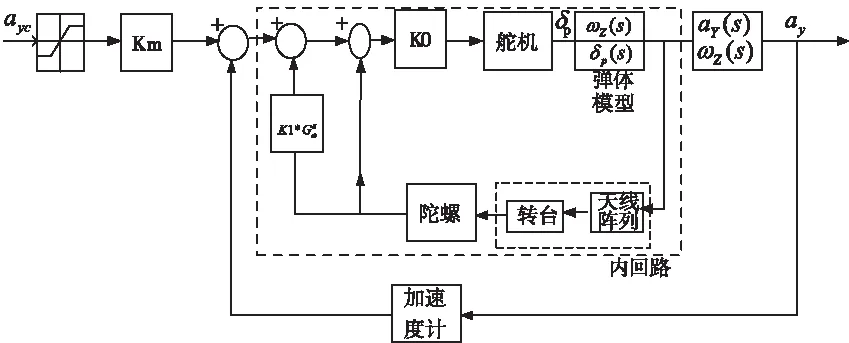
圖4 引進空空導彈控制系統引入設備后結構框圖
在引進空空導彈控制系統引入飛行轉臺和天線陣列傳遞函數后,可通過頻域特性和閉環系統階躍響應,來分析設備對引進導彈控制系統的影響。
4 仿真結果與分析
4.1 設備對半實物仿真系統角度誤差仿真與分析
按照飛行轉臺設備研制時所提指標,飛行轉臺導引頭所處位置與靜區的偏移量D的最大誤差范圍為±2mm,導引頭所處位置與靜區的角度偏差最大不超過5″,飛行轉臺回轉中心到天線陣列的R為15m;天線陣列設備研制所提指標,BB′最大的取值范圍為0.2mm,ε可取值范圍為[0,2π],則根據式(1)、(2)、(3)、(4)、(5)、(6)可得圖5、圖6。
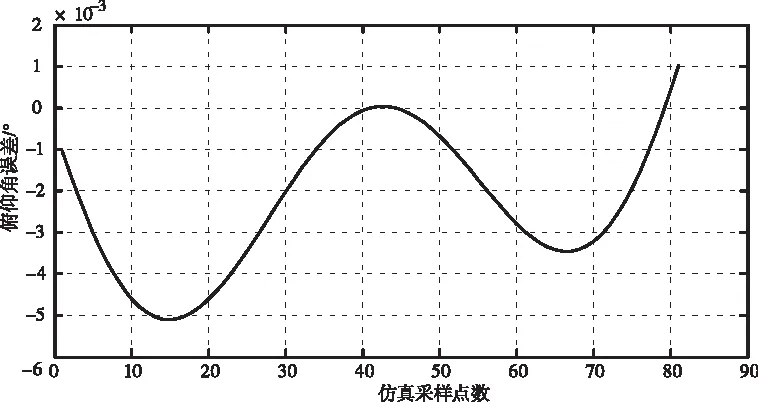
圖5 俯仰角誤差范圍
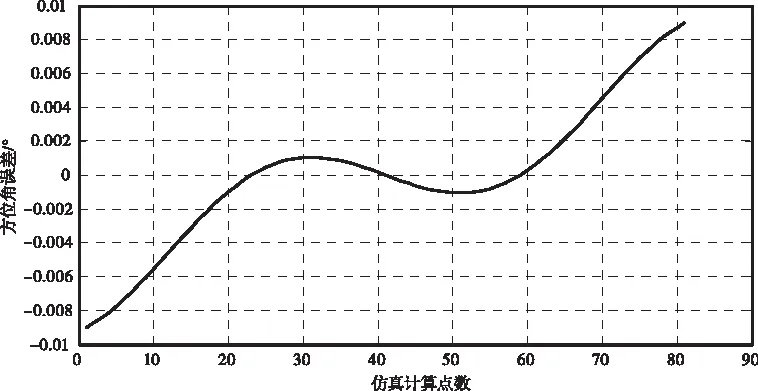
圖6 方位角誤差范圍
從仿真計算結果可知,現有飛行轉臺和天線陣列的角度綜合誤差:俯仰角誤差最大值為0.005度,方位角誤差為0.009度。飛行轉臺和天線陣列的角度綜合誤差遠低于目前空空導彈導引頭測角系統分辨率,對導引頭測角影響甚微,因此飛行轉臺和天線陣列等設備角度設計指標是合理的,可以用來構建引進空空導彈半實物仿真系統。
4.1 設備對引進空空導彈控制系統頻響特性仿真與分析
選取空空導彈控制系統特征點h=10000m,Ma=1.2,確定控制系統控制參數Km,K1,K0,對未引入飛行轉臺和天線陣列的引進空空導彈的控制系統進行階躍響應和頻域響應仿真,圖7為引進空空導彈控制系統頻域響應,圖8為引進空空導彈控制系統階躍響應。
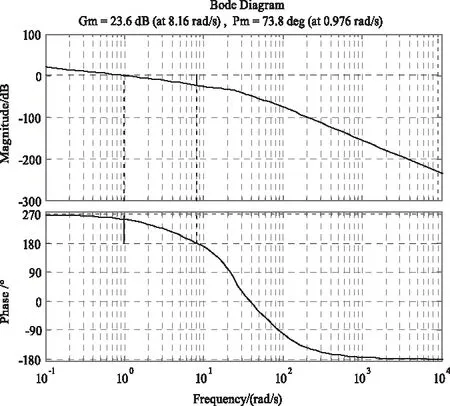
圖7 未引入設備時引進空空導彈控制系統頻域響應
將飛行轉臺的傳遞函數模型(13)和天線陣列的傳遞函數模型(17)引入空空導彈控制系統縱向回路,圖9為引入設備傳遞函數后回路的階躍響應對比,圖10為引入設備傳遞函數后回路頻域響應。
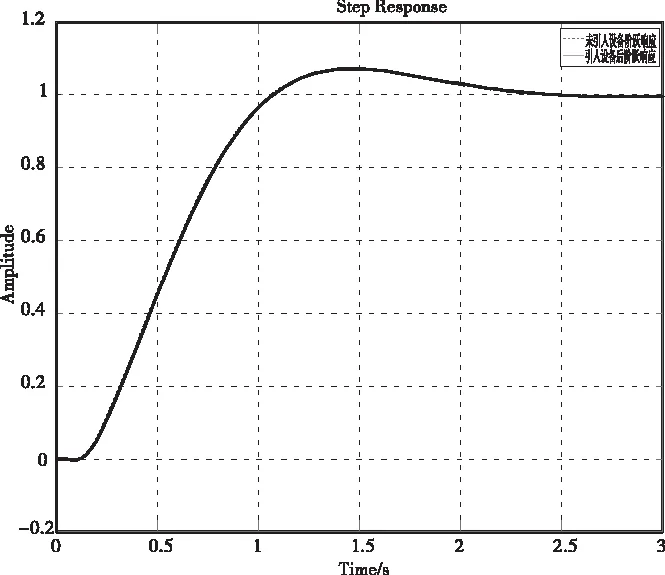
圖9 引入設備后引進空空導彈控制系統階躍響應
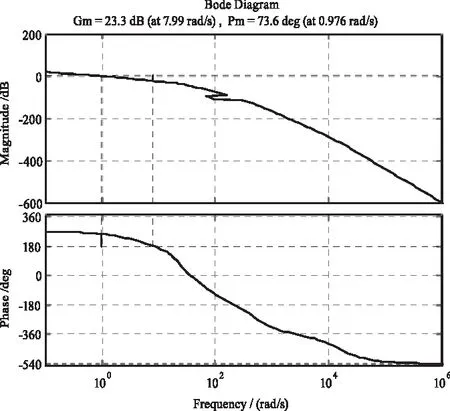
圖10 引入設備后引進空空導彈控制系統頻域響應
由圖7~10可以看出,在飛行轉臺和天線陣列的引入對引進空空導彈的控制系統的階躍響應影響甚微,系統頻域穩定裕度變化很微小,幅度相差0.3dB,相位相差0.3度,可見目前設備制定的設計指標是合理的,可進行半實物仿真系統建設。
5 結論
本文對半實物仿真系統重要設備飛行轉臺和天線陣列進行分析,根據飛行轉臺和天線陣列建設時所提指標,構建飛行轉臺和天線陣列角度誤差模型和頻響模型,并結合引進空空導彈控制系統結構和模型,詳細分析了飛行轉臺和天線陣列的精度指標和時頻域指標對半實物仿真系統設計時影響,通過仿真分析可知,現階段在考慮經濟性的前提下,飛行轉臺和天線陣列設備設計指標合理,設備的引入對引進空空導彈測角系統和控制系統的影響甚微,能夠支撐引進空空導彈半實物仿真系統的建設。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
工業設計(2016年12期)2016-04-16 02:52:00
