Petri網作用下航空裝備虛擬維修訓練仿真
2023-05-31 09:13:46張原,李璇
計算機仿真 2023年4期
張 原,李 璇
(海軍航空大學航空基礎學院,山東 煙臺 264001)
1 引言
在航空技術高速發展的背景下,航空裝備維修顯得格外重要。維修工作主要負責飛行設備養護、故障維修和排除等工作,使各類設備滿足安全飛行要求,不僅能夠維系飛機飛行安全,還能確保各航空公司正常運行。但是,隨著我國航天事業的壯大,飛機數量急劇增多,對設備維修人員的需求量與日俱增,每年都會對大量的機務人員進行多次培訓,訓練過程大多都在實裝飛機上完成,勢必會造成資源浪費,培訓效率極低,且訓練效果難以保證。此外,一些高技術航空設備的研制,也為日常維修帶來較大難題。這類設備結構復雜,需求多變,對維修人員的專業水平要求極高。因此,傳統的維修訓練方式已經難以適應航空裝備維修需求。
近年來,訓練仿真模型憑借安全、可控和不受環境限制等優勢廣泛應用在航空設備維修中,受到廣大學者的廣泛關注。例如,文獻[1]利用互聯網、衛星等數據傳輸平臺,建立綜合模擬訓練系統,分析維修任務訓練需求,確立系統整體架構,探究系統組成、技術架構和信息交互等模塊的交互關系,有效保證系統訓練的全面性。除此之外,還有學者研究了一種基于虛擬現實的航空設備虛擬維修訓練模型。設置了X Mind思維導圖和Sql Server訓練數據庫,通過虛擬現實技術實現維修過程可視化,提高維修過程的靈活性。
虛擬維修訓練的實質是在仿真環境下對維修工作的再現和預演,必須通過合理的模型來指導仿真。再加上維修程序復雜,涉及多種維修資源,上述方法很難全面、詳盡地描述維修過程[2]。因此,本文吸取上述方法的相關經驗,建立基于Petri網的航空裝備虛擬維修訓練仿真模型。Petri網可用組合圖形描述問題,具有較強的靈活性與強大的分析性能,廣泛應用在并發性和非確定性較強的模擬系統中,是最受歡迎的建模工具[3]。因此,通過Petri網對虛擬維修訓練過程建模,能為保證航空裝備安全提供技術支持。
2 航空裝備維修訓練要素和任務分析
2.1 基本要素
通過分析相關培訓項目,確定航空裝備維修訓練基本要素包括如下方面:
1)維修事件:結合故障預警或維修計劃進行維修作業,是所有維修任務的總稱,通常包含檢測、分解、更換和調試幾個過程[4]。
2)維修目標:指需要維修的部件,其具備固定的結構尺寸和部件約束關系,維修時需要根據設定順序維修。
3)維修人員:是一種維修資源,也是培訓主體。需結合維修需求執行相應的任務,根據作業順序,使用相關工具完成部件維修。培訓過程中涉及的操作方式會對維修效果產生較大影響。
4)維修資源:分為工具、設備和維修資料。其中工具與設備分為專用與通用,維修人員會重復使用這些資源,通常不涉及消耗問題。
5)維修狀態:是對維修目標、資源和人員的狀態描述。例如,維修目標的拆分狀況、人員數量、設備種類和數量等,綜合表示所有對象的屬性信息[5]。
6)維修約束:表示維修目標、人員和設備之間的作用關系。維修是需要通過人員執行的,必須設定約束條件,避免出現系統混亂的情況。例如,培訓人員需要根據拆裝規則檢查部件,使用的工具和執行順序都是固定的。另外維修過程中各項任務也會存在先后約束關系。
2.2 維修培訓任務
利用虛擬人進行維修仿真時,利用分層思想將維修任務分解為如圖1所示的幾個層次。通過此種分解,能夠將一個復雜的維修任務變換為簡單事件,更有利于虛擬維修訓練仿真。
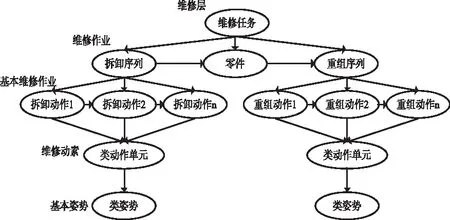
圖1 維修訓練任務分解模型示意圖
因維修目標是訓練主體,根據訓練人員對維修技巧的掌握情況,將訓練模式分為如表1所示的幾種類型。
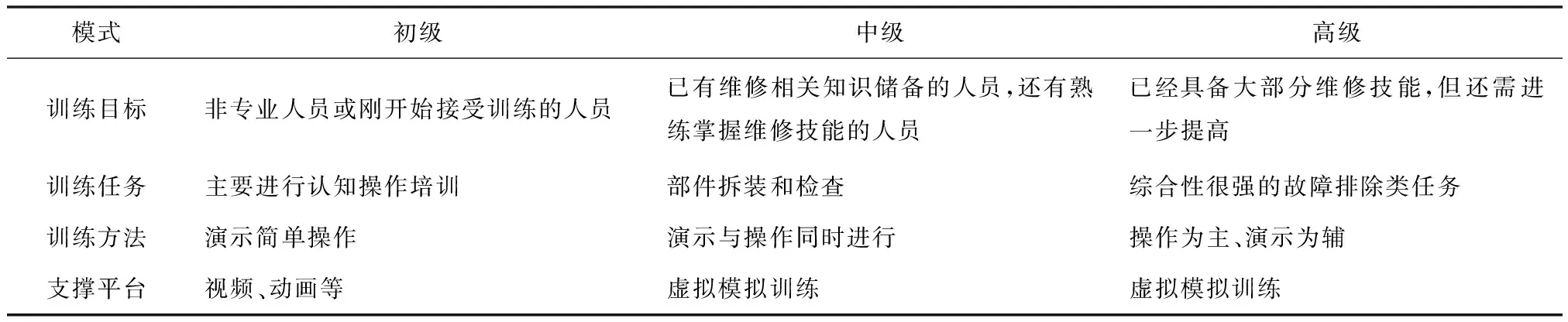
表1 訓練模式分類表
綜合分析維修訓練的基本要素和培訓任務,為Petri網虛擬訓練仿真模型的構建奠定基礎,將這些要素和相關任務引入到Petri網中,即可構建一個完整的仿真訓練模型。
3 虛擬維修訓練仿真模型構建
3.1 訓練模式選擇
結合任務分解模型可知,維修任務是具有層次化的,可選擇串行、并行和選擇等任意一個模式。
1)串行模式:所有維修操作都根據固定順序執行,當完成前一個任務時,才能開始下一個任務,將此種作業方式稱為串行作業。
2)并行模式:是在串行基礎上擴展得到的,在此模式中,維修任務可以同時進行。并行模式包括兩種,其一是多種任務同時執行;另外一種是直到某些作業停止后,才能執行新的任務。
3)選擇作業[6]:需按照不同維修狀態對相同任務制定多個維修策略,維修人員需要選擇作業,只能有一個策略發生變遷,其他方案不能。
以上描述的三種作業模式可通過圖2所示的作業模型表示。
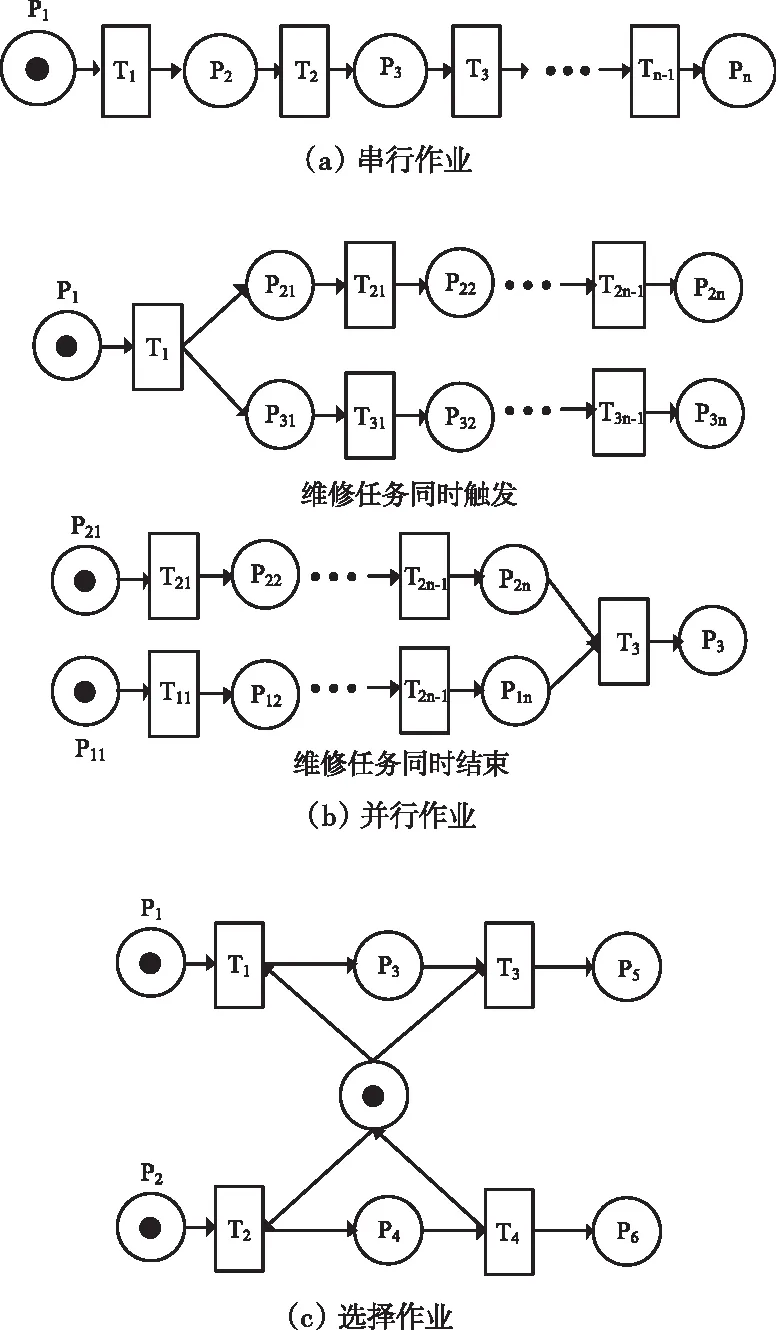
圖2 不同作業模型示意圖
圖2中,Pi(i=1,2,…,n)代表維修任務狀態集合,包括準備、完成等狀態,Ti(1,2,…,n)表示維修任務遷移集合。
3.2 Petri網子網建模
假設與維修目標ei相對的子網模型表示為PNi
PNi=(Pi,Ti,Fi,Ui,Oi0,Ei,Bi,Ri)
(1)
組成該模型的具體內容如下:
1)(Pi,Ti,Fi)屬于模型基網,在維修訓練中,Pi={Pi0,Pi1,Pi2,…,Pin}表示目標ei的狀態集合,即維修任務的狀態集合,且Pi0和Pin分別描述起始狀態與最終狀態。只有在這兩種狀態下才能將子網當作激活其他子網的條件,Pi1、Pi2代表中間狀態。Ti是目標ei的遷移集合,符合Pi∩Ti=Pi∩Fi=Ti∩Fi條件,Fi是子網PNi的有限弧集合,存在如下映射關系Fi→Pi×Ti×Pi。
2)Ui代表權函數,描述任務變遷對資源的消耗程度[7]。
3)Oi0代表PNi的最初標識。
4)Ei表示使Ti變化的事件集合,通常為觸發事件或消息觸發。
5)Bi表示變遷后發生的動作集合。維修動作一般分為平移、轉動等。當變遷激活后,只有完成對應的維修動作才可以實現狀態轉換,減少跳躍性導致的維修訓練仿真度降低的問題[8]。
6)Ri代表時間集合,描述Ti間最小觸發時間。由于一些虛擬動作完成后,必須經歷一段時間延遲才能繼續執行下一步操作,因此Ri為非負的。
3.3 裝備部件約束
3.3.1 基于有向圖的約束關系表示
航空裝備作為被維修目標,屬于維修主體,維修資源則表示在裝備部件狀態不斷發生變化的情況下,出現的消耗變遷,是約束維修任務的主要因素。因此,要想獲得理想的培訓效果,如何全面表述裝備部件維修過程中的約束關系是關鍵[9]。
針對某完整維修任務,將構成該任務的所有部件集合表示為V
V={vj|vj∈V,j=1,2,…,m}
(2)

3.3.2 有向圖變換
通過上述建立的有向圖G=〈V,Ac〉能夠表示出部件間具有的約束,但不利于構建仿真模型。因此,還需要將有向圖變換為鄰接矩陣[11],方便模型處理。
針對有向圖G=〈V,Ac〉,假設節點順序表示為v1到vj,則h階方陣AG=(ai′j)h×h就是G的鄰接矩陣,其中,i′,j=1,2,…,h。如果有vi′指向vj的有向弧存在時,ai′j=1,表示節點vi′的優先級比vj高;反之,ai′j=0,說明兩個節點間沒有優先級約束[12]。
由此可以看出,AG(ai′j)h×h屬于h階方陣,元素值為1或0。且i′行和i′列元素之和分別表示節點vi′的出度與入度。

3.4 虛擬維修訓練仿真模型
在分析了Petri子網模型和裝備約束關系后,建立具有動態重組能力的Petri網虛擬維修訓練仿真模型[14]PN
(3)
假設部件vi′的變遷ti′j被觸發的條件[15]表示為:
1)針對j=1,2,…,h,其符合鄰接矩陣AG中ai′j=0的條件;
2)當rti′j≥ri′j時,即觸發間隔rti′j大于等于最短觸發間隔ri′j。
則在最初標識Oi0作用下,部件維修任務訓練變遷過程描述為
(4)
式中,p表示維修狀態分量,O為標識向量對應的分量。
4 仿真過程與結果分析
以某飛機發動機維修為實驗目標,基于Petri網建立了虛擬維修訓練仿真模型。發動機維修是航空裝備中較為復雜的維修任務,過程繁瑣。此次維修任務需要準備的相關材料如下:樣機模型一套、12個常用工具、52個操作單元、77個維修圖文件和2個工裝模型。其中工裝模型是1個架車與一個千斤頂。
1)模型可用性分析
結合仿真目標的相關信息,利用Petri網建立的虛擬維修訓練仿真模型如圖3所示。
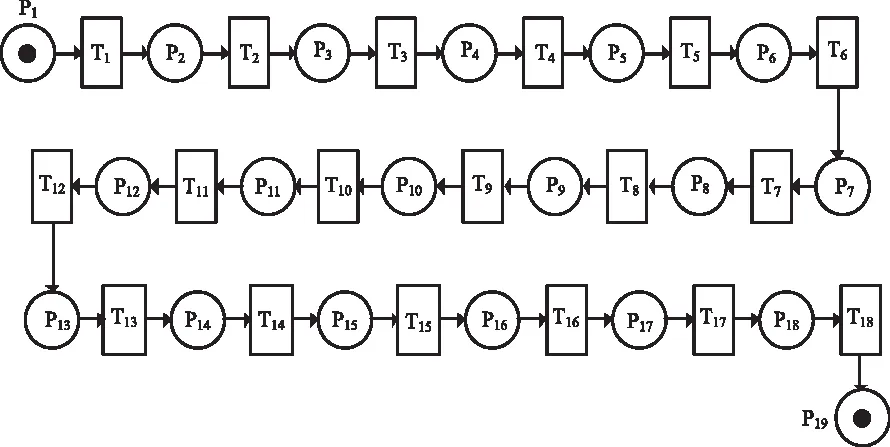
圖3 基于Petri網的虛擬維修訓練仿真模型圖
由圖3所示,此次實驗選用的是串行作業模式,在該模型中,各任務具體含義如表2所示。
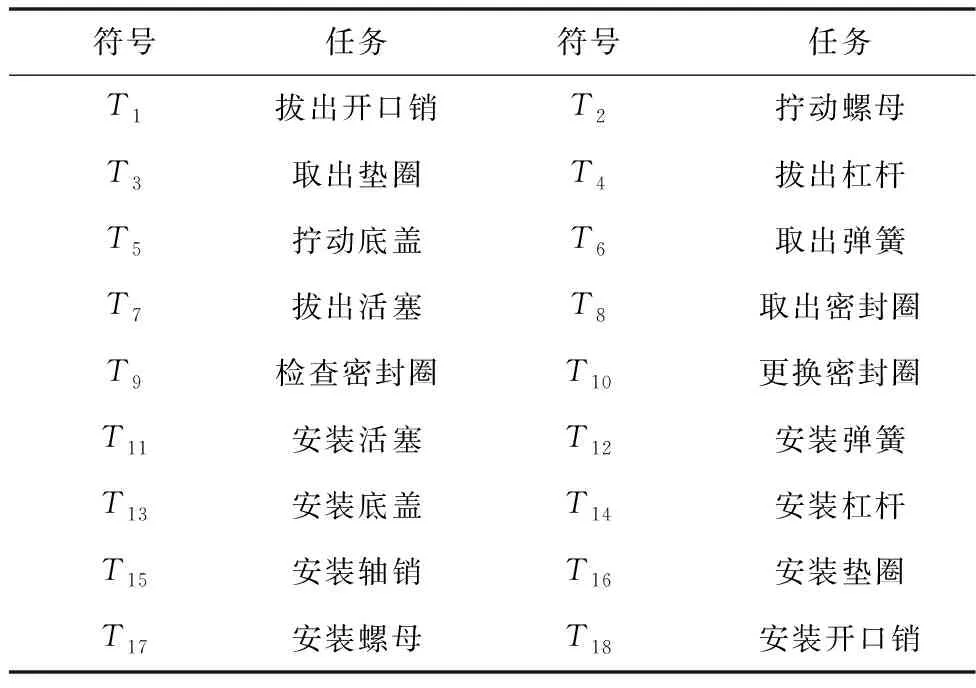
表2 維修具體任務表
在此仿真模型中,P1和P19分別描述維修開始和結束的狀態,其他狀態都是和任務相互對應的狀態。
由圖3可知,仿真模型中輸入與輸出都是唯一的,說明執行每個任務時都存在唯一的緊前和緊后操作,體現了維修訓練活動的邏輯關系,確保模型在給定狀態下,不會因為任務較多出現死鎖情況。
2)模型可靠性分析
結合飛機發動機維修任務可知,此裝備系統為時變多任務系統,完成維修任務需要經歷多個階段。由上述分析可知該模型適用于維修訓練,能夠順利完成任務,但是任務完成質量未知。為此,需要進一步分析模型的可靠性。
假設維修狀態Pi失效率表示為λi,將任務逐級傳遞到最終節點,則模型可靠度Rsos的計算公式如下:
(5)
公式中,v表示任務變遷集合。如果可靠度Rsos的值為0-0.35說明模型可靠度低;若值為0.35-0.75,表明可靠性在理想范圍;大于0.75則表示可靠度很高,能夠完成高質量的維修訓練仿真。
將本文方法的可靠度計算結果和綜合模擬訓練系統、虛擬現實仿真訓練模型的結果進行對比,比較結果如圖4所示。
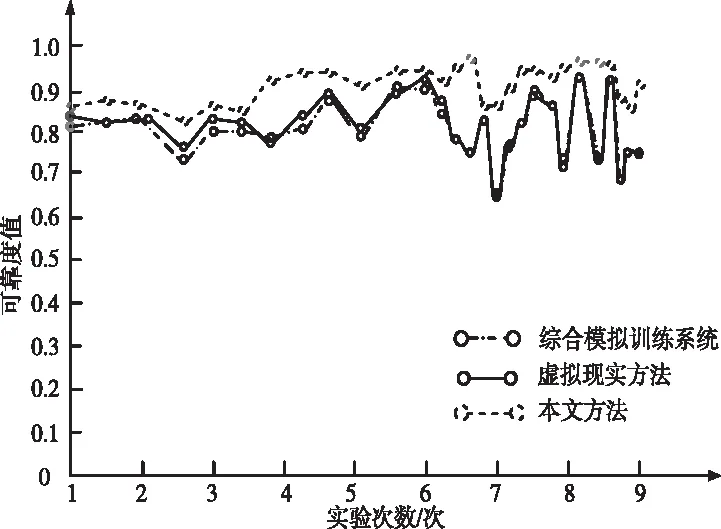
圖4 不同模型仿真可靠度值對比圖
分析圖4可知,本文方法在多次實驗中均獲得了較高的可靠度值,虛擬現實算法和綜合模擬訓練系統的可靠度值忽高忽低,穩定性較差;且始終低于本文方法。這說明基于Petri網的訓練仿真模型結構穩定、邏輯關系明確,能夠準確檢測并維修故障部件,部件間約束關系的合理設置起到關鍵作用。
3)模型執行時間分析
在進行模型可靠度分析的同時,記錄6次實驗過程中,三種模型的執行時間,實驗結果如圖5所示。
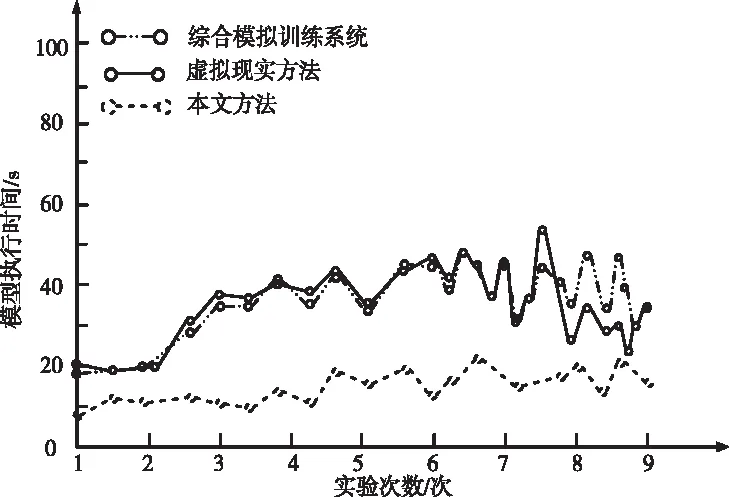
圖5 維修訓練仿真模型執行時間對比圖
圖5顯示,本文方法的模型執行時間在三種方法中是最短的,這是因為隨著實驗次數的增加,模型逐漸成熟,執行時間縮短。此外,Petri網結構復雜度低,訓練過程簡便,節省時間,提高訓練效率。
5 結論
裝備維修是航空設備維護中的重要環節,隨著裝備復雜度的提高,對維修人員的專業要求也越來越高。為改善維修訓練效果,提出基于Petri網的虛擬維修訓練仿真模型研究。分析維修任務,確定維修邏輯,構建部件之間的約束關系,完成訓練仿真模型構建。實驗證明,所建模型可靠性高,節約訓練時間。但是本次研究也存在一定不足,例如實驗中沒有考慮培訓人員對該模型的熟練程度,今后研究中應該注重此問題的分析,全面提高模型性能。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
辦公室業務(2020年18期)2020-09-29 12:15:58
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
數學物理學報(2020年2期)2020-06-02 11:29:24
勞動保護(2019年7期)2019-08-27 00:41:26
光學精密工程(2016年6期)2016-11-07 09:07:19
故事大王(2016年7期)2016-09-22 17:30:08
兒童故事畫報(2013年3期)2013-06-24 05:40:30
體育師友(2011年5期)2011-03-20 15:29:53
