基于群體智能的微納衛星集群自主控制系統研究
2023-05-31 09:06:34付偉達汪忠輝蘇晨光何昌遠張皓滕揚黃繁榮常藍天施思寒
航天器工程 2023年2期
關鍵詞:智能
付偉達 汪忠輝 蘇晨光 何昌遠 張皓 滕揚 黃繁榮 常藍天 施思寒
(1 航天東方紅衛星有限公司,北京 100094)(2 北京航空航天大學,北京 100191) (3 中國科學院空間應用工程與技術中心,北京 100094)
在自然界中,很多生物可以組成一些具有自組織特性的集群,如蟻群、蜂群、魚群和鳥群等[1-2],以實現長途遷徙、逃避捕食者等單個個體難以完成的任務。
近年來,借鑒自然界生物集群自組織特性,航天器集群項目逐漸發展起來,通過星群成員之間協同運動與共同合作控制,完成整體任務目標。
微納衛星集群是一種以微納衛星為核心的新型空間體系架構,其中多個可進行信息交互的成員衛星相互協作,具有特定空間構型,共同承擔信號處理、通信、有效載荷等任務。微納衛星集群控制已逐漸發展成為各航天大國研究熱點方向,典型項目有自主納技術集群計劃(ANTS)[3]、拉格朗日點太空天氣預報集群(L5SWS)、微納衛星空間自主集群和定位任務(SAMSON)和愛迪生小衛星驗證(EDSN)等。面對日益復雜空間環境和任務實時性需求,依靠傳統地面逐一控制單星模式難以完成對星群的有效管理,不能有效發揮星群的效能[4],本文提出了星群集群自主控制組織框架和協商機制,研究了基于群體智能的微納衛星集群自主控制系統,解決星群在復雜空間環境下自主性和整體任務效能問題。
1 微納衛星集群組織架構和協商機制
目前關于集群控制理論研究主要集中于多智能體系統,通過模擬生物群落的群體行為,借鑒生物個體的信息傳遞方式,構成群體智能系統[5]。星群集群控制系統首先將星群的每顆衛星看作是一個智能體(Agent),具有一定感知、決策和通信交互能力;然后建立基于多Agent衛星集群控制組織架構和協商機制,構建基于群體智能的微納衛星集群自主控制系統。
1.1 星群集群群體智能性
國內外研究發現生物群體中每一個成員行為與它們所處的群體關系密切,個體的行為不是某一個作為領導的指揮者決定的,而是基于其相鄰個體行為得到的。將這個思路應用到分布式集群控制,本文采用基于群體智能的控制方法來實現星群自主控制,即把整個微納星群系統抽象成一個多智能體系統(Multi-Agent System, MAS),星群成員衛星都視作具有獨立性、自主性的智能體衛星,通過星群間的自主信息交互與協同決策,驅動整個星群系統在宏觀上呈現協同一致的行為,使其具備群體智能性,共同完成空間任務。
1.2 星群集群控制組織架構
生物群體中不存在中心節點,個體遵循簡單的行為規則,僅具備局部的感知、規劃和通信能力,通過與環境和鄰近伙伴進行信息交互從而適時地改變自身的行為模式以適應動態環境,具有組織結構分布式特點[6]。本文星群集群控制組織架構采用分布式控制策略,依賴著局部信息交流,產生一種耦合自身狀態與相鄰成員狀態的控制指令,實現對各成員衛星的控制,具有全局的優化性能,同時系統中星群成員增減不會改變運行模式,能夠實現對整個星群集群靈活自主控制,如圖1所示。
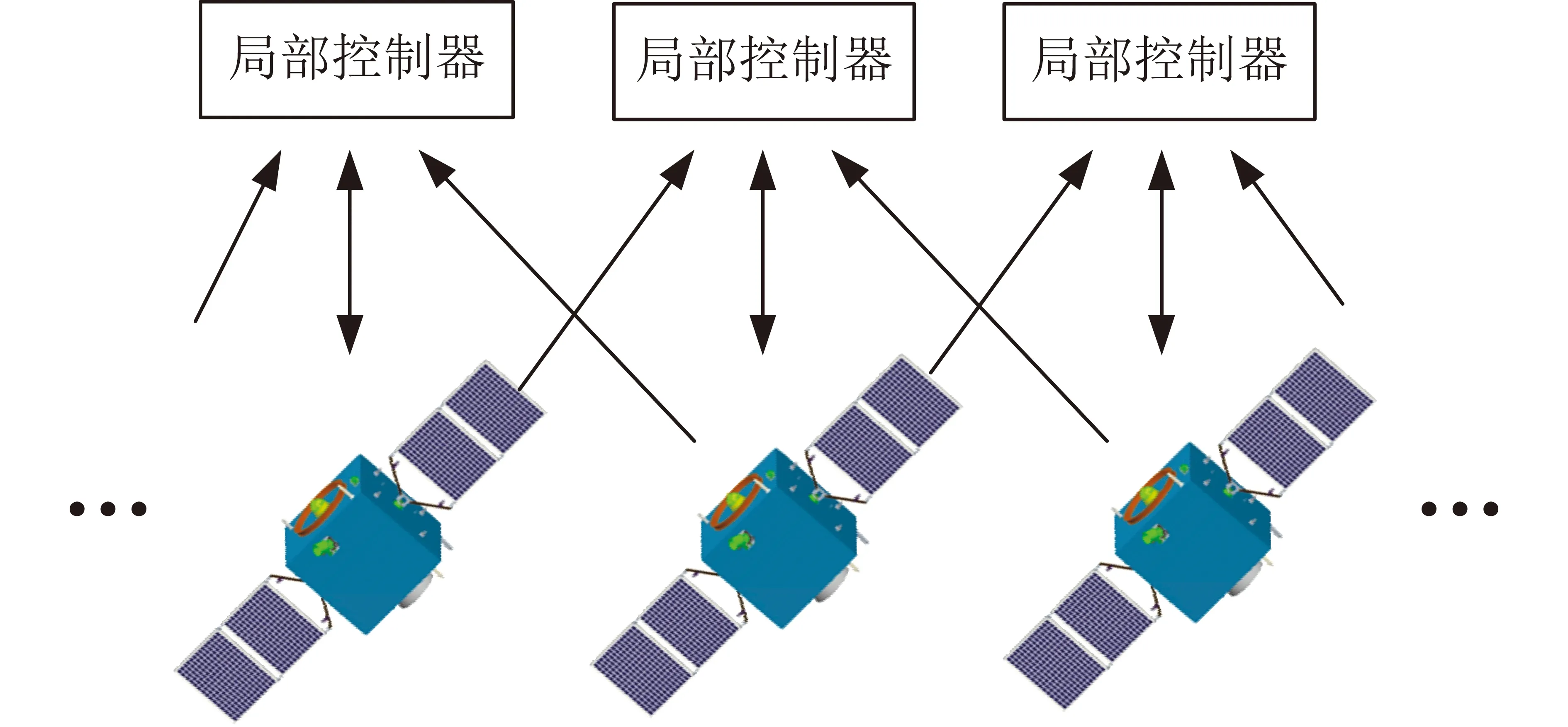
圖1 分布式控制星群集群策略Fig.1 Distributed control of satellite swarm
1.3 星群集群控制協商機制
星群集群控制協商機制既要求任務協同求解,又注重實時任務處理,是一個復雜的過程。本文星群集群控制采用多Agent成員衛星協商機制,其具有資源共享、協調性好、分布性高、自主性強的特點,協商機制主要有4種:組織結構協商、基于承諾和約定的協商、結果共享模型和社會規范協商、合同網協議等[7]。其中基于合同網協議的協商機制簡單、執行效率高,已經成為飛行器集群任務分配中應用最為廣泛的方法[8]。合同網協商機制類似于現實生活中談判過程,可以通過基于Agent衛星交互的招投標工作來進行相關任務的處理[9]。合同網協議的運行模式能夠適用于多智能體系統(MAS),智能衛星的智能性與交互性使得合同網機制在MAS中體現出巨大優勢。本文星群合同網協議主要過程如下:當某Agent衛星資源不足以完成任務時,此Agent作為招標者通過任務發布、標書收集、中標通知和合同建立等流程,完成星群集群合同網協商機制,如圖2所示。
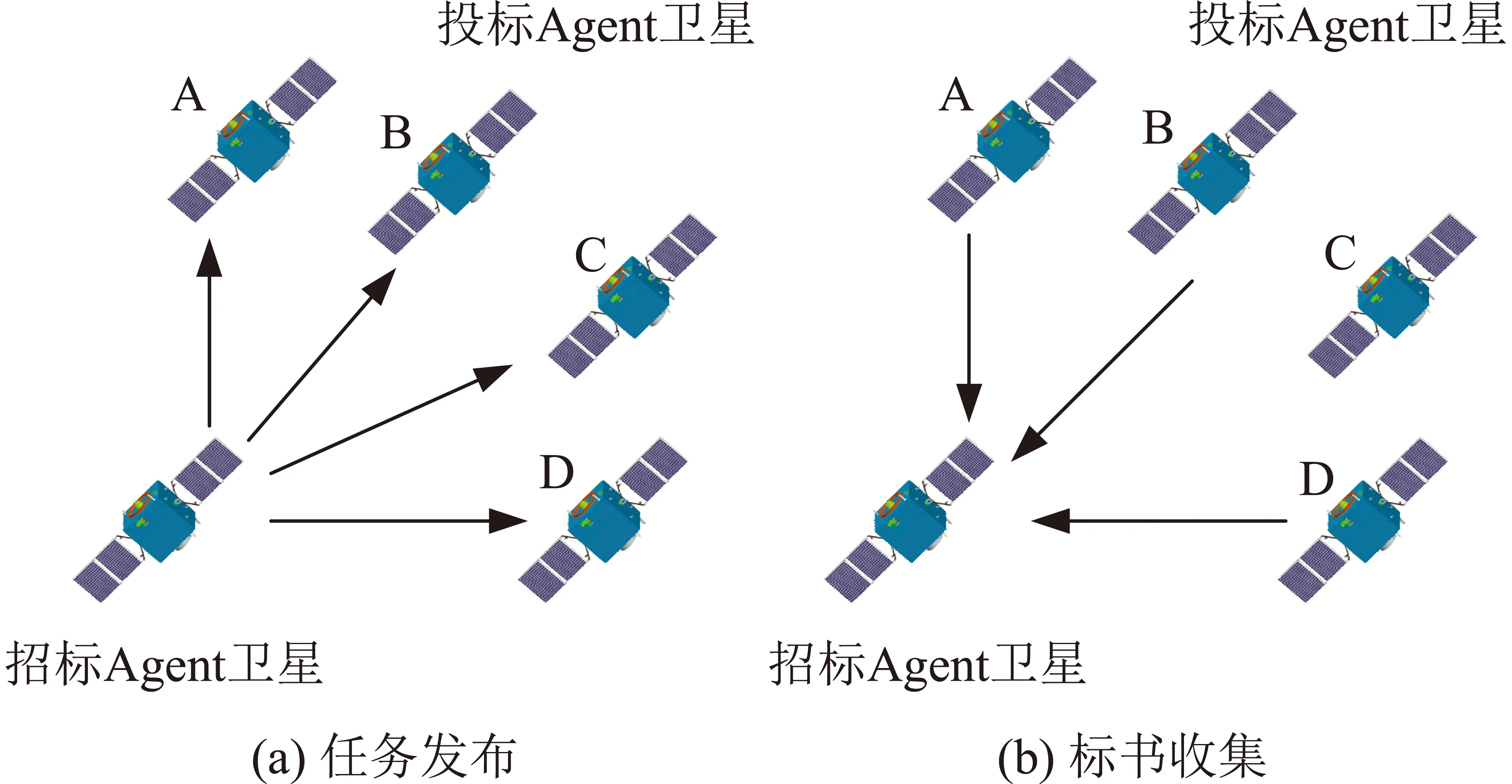
圖2 星群集群合同網協議Fig.2 Contract network protocol of satellite swarm
2 微納衛星集群自主控制系統
如前文所述,星群成員數量多,如地面逐一進行單星控制,與有限的地面測控資源之間存在巨大矛盾,決定了微納星群必然朝著基于群體智能的自主控制方向發展。集群自主控制是在星群成員衛星具有一定認知、決策和自身健康狀態管理基礎上,通過星間網絡信息交互與協同決策,驅動整個星群系統在宏觀上呈現協同一致的行為,即星群集群自主控制的成員特征組成群特征,星群的決策通過成員來實現,如圖3所示。

圖3 星群集群自主控制系統框圖Fig.3 Block diagram of micro-nano satellite swarm autonomous control
針對圖3分析,本文總結出集群自主控制主要包括星群自主認知和自主決策技術、構型建立維持與重構技術和星間高低速協同通信技術等主要研究內容(見圖4),具體如下。
(1)星群自主認知與自主決策技術:星群自主感知融合生成任務態勢;采用基于交互協商的分布式協同任務規劃方法,星群具有自主決策能力;不同功能的衛星自主執行協同實施行動,由單星單打獨斗到星群聯合工作方式的轉變,實現星群系統的智能涌現。
(2)星群構型建立維持與重構技術:星群在非任務期間處于類似蜂群、鳥群松散編隊狀態,在低能耗不碰撞的條件下飛行;在任務期間構型能夠快速建立與維持,完成群整體行為和個體成員行為的進行控制。同時,利用星群測量信息冗余關系,進行星群故障診斷,識別故障衛星,完成星群構型重構。
(3)星群星間高低速協同通信技術:星群采用全向無中心自組網通信、定向高速激光通信構建星間高低速協同通信網絡系統,通過全向低速自組網提供傳輸位置信息引導高速激光鏈路協同傳輸,完成星群低速協同控制信息和高速載荷數據協同傳輸。
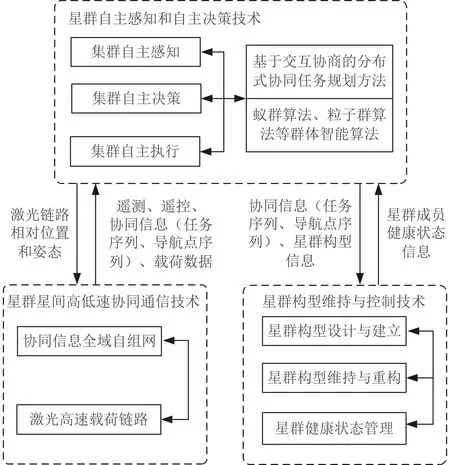
圖4 星群集群自主控制信息流Fig.4 Micro-nano satellite swarm autonomous control information flow
2.1 星群自主認知和自主決策技術
微納衛星星群成員眾多,相互之間距離很近,實時性要求高,需要微納星群具備自主認知和自主決策能力。微納星群自主認知和自主決策中面臨目標非合作特性、任務規劃時效性強、星上計算資源受限、規劃要素多樣且復雜等難點,對星群自主認知和自主決策框架提出較高的要求,為此,本文構建基于群體智能的分布式協同框架,提出基于合同網的任務協商與分配方式,以適應分布式動態場景下星群任務對快速響應能力和資源優化性能要求。
微納星群自主認知和自主決策問題可分解為星群任務可調度性預測、任務協商與分配和星群成員方案優化等內容,研究框架如圖5所示。本文星群任務可調度性預測主要利用星群任務規劃經驗數據,將歷史規劃結果看作訓練數據,通過構建機器學習模型,準確預測當前規劃方案,完成對星群任務規劃;任務協商與分配則采用基于市場機制設計的合同網協議,將蟻群算法、粒子群算法、遺傳算法等[10]智能優化技術引入合同網招標、投標和評標過程,利用歷史任務分配結果加速星群協商效率;成員衛星方案優化則是在單星層面根據資源和任務等約束下對分配的任務進行優化調整,包括衛星動作優化、軌跡優化、載荷執行等方面。
圖5 星群自主認知和自主決策研究框架Fig.5 Research framework for satellite swarm autonomous cognition and autonomous decision
2.2 星群構型建立維持與重構技術
微納星群構型通過控制微納星群的各成員衛星,完成構型建立、維持以及重構,同時在星群操作的過程中防止出現碰撞,需要研究星群在一個均衡的前提下,實現構型最優的性能指標。因此,本文提出采用合作博弈優化的理論使星群內各成員衛星的資源消耗達到均衡,不出現某顆成員衛星過度消耗資源(燃料、能源等)情況,使整個星群實現構型最優的性能指標。博弈論又稱對策論,是一種使用嚴謹數學模型來解決現實世界中的利害沖突的理論,是建立在對方也采取各自“最好策略”的前提下,各方最終達到一個力量均衡。星群內的所有成員衛星都是博弈的成員,星群內某個成員衛星可能的行動方案為策略,局中人的策略全體形成策略集,通過采用博弈論達到星群最優構型。
本文根據星群相對運動方程確定星群集群構型,對星群集群重構、保持控制問題進行問題建模,設計控制算法:根據星群常用集群構型設計構型重構算法,針對星群設計軌道保持算法,利用相對軌道要素取交集方式設計軌道控制,利用博弈論建立求解方程,通過數學工具計算星群各成員衛星的均衡解,完成星群構型建立維持與重構控制[11],如圖6所示。
圖6 星群構型建立維持與重構技術Fig.6 Satellite swarm establishment maintenance and reconstruction
2.3 星群星間高低速協同通信技術
微納星群集群需要傳輸成員衛星低速的遙測、遙控、協同信息(任務序列、導航點序列)和高速的載荷數據,對星間傳輸鏈路提出了低速全覆蓋和高速精準傳輸的需求。因此,本文星間高低速協同通信網絡采用了星間自組網和高速激光鏈路相結合的方式,實現信息共享協同工作。星群集群任務過程中,首先通過自組網實現星間協同信息引導激光器的跟瞄和對準,達到高低速協同通信的目的,星間高低速網協同通信工作流程如圖7所示。
其中,本文的全向星間自組網包括物理層、數據鏈路層、網絡層和應用層[12],具備服務質量(QoS)功能,保證了信息的高可靠的傳輸,主要完成低速遙測、遙控、協同信息的全向傳輸,如圖8所示;星群配置的小型化、高帶寬的星間激光鏈路則完成點對點定向的大數據量載荷數據傳輸。
圖7 星群高低速網協同通信工作流程Fig.7 Satellite swarm high and low rate cooperative communication process
圖8 星群自組網協議Fig.8 AD Hoc network protocol of satellite swarm
3 微納衛星集群控制場景仿真
本文設計了綜合遙感微納星群典型應用場景,星群的10顆成員衛星主要配備可見光、高光譜、合成孔徑雷達(SAR)、紅外、微光相機等5種載荷,組成特定構型的星群集群,獲取融合的目標特征,實現對目標發現、識別、確認后,進行長時連續多維成像,感知目標的特征變化。根據任務需求,星群控制要求軌道誤差小于20m、網絡通信建立與重構時間小于5s。可以看出:上述星群若采用地面單星控制,星地測控鏈路單條指令閉環時間約10s,地面管控不能滿足星群實時性指標且工作量巨大,因此,只能依靠星群集群自主運行控制技術,完成星群集群控制。為此本文構建了仿真系統,驗證微納衛星集群自主控制可行性,如圖9所示。
仿真過程中,10顆微納星群搭載運載發射入軌,星群入軌后采用自主控制防碰撞,星群軌道由松散狀態到建立初步構型三維軌跡如圖10所示。
經10天仿真測試可得:星群自主單次維持控制量小于0.5m/s(見圖11(a)),長期運行穩定,自主控制滿足任務需求;星群成員軌道控制誤差小于20m(見圖11(b));當星群成員衛星出現故障后,星群自主完成構型重構(見圖11(c));星群網絡通信建立與重構時間0.8~4.6s,星群網絡通信成員衛星的自主動態接入、退出功能正確(見圖11(d))。綜上所述,星群集群自主控制功能正確,滿足任務指標需求,驗證了微納衛星集群自主控制的可行性和正確性。
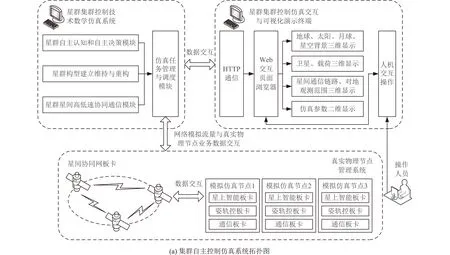
圖9 微納衛星集群自主控制仿真軟件Fig.9 Simulation software for micro-nano satellite swarm autonomous control
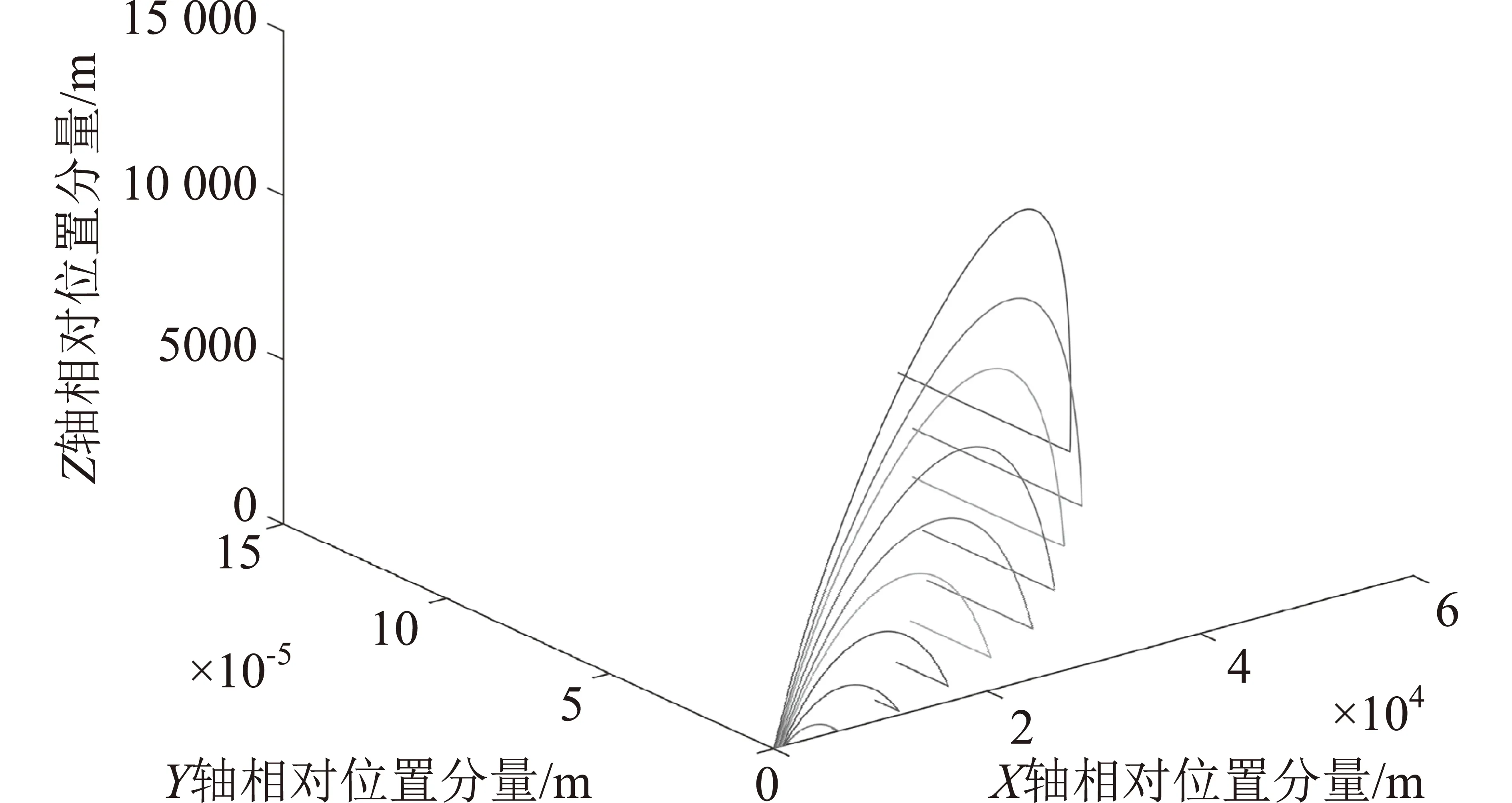
圖10 星群構型建立三維軌跡Fig.10 Three-dimensional trajectories of satellite swarm configuration
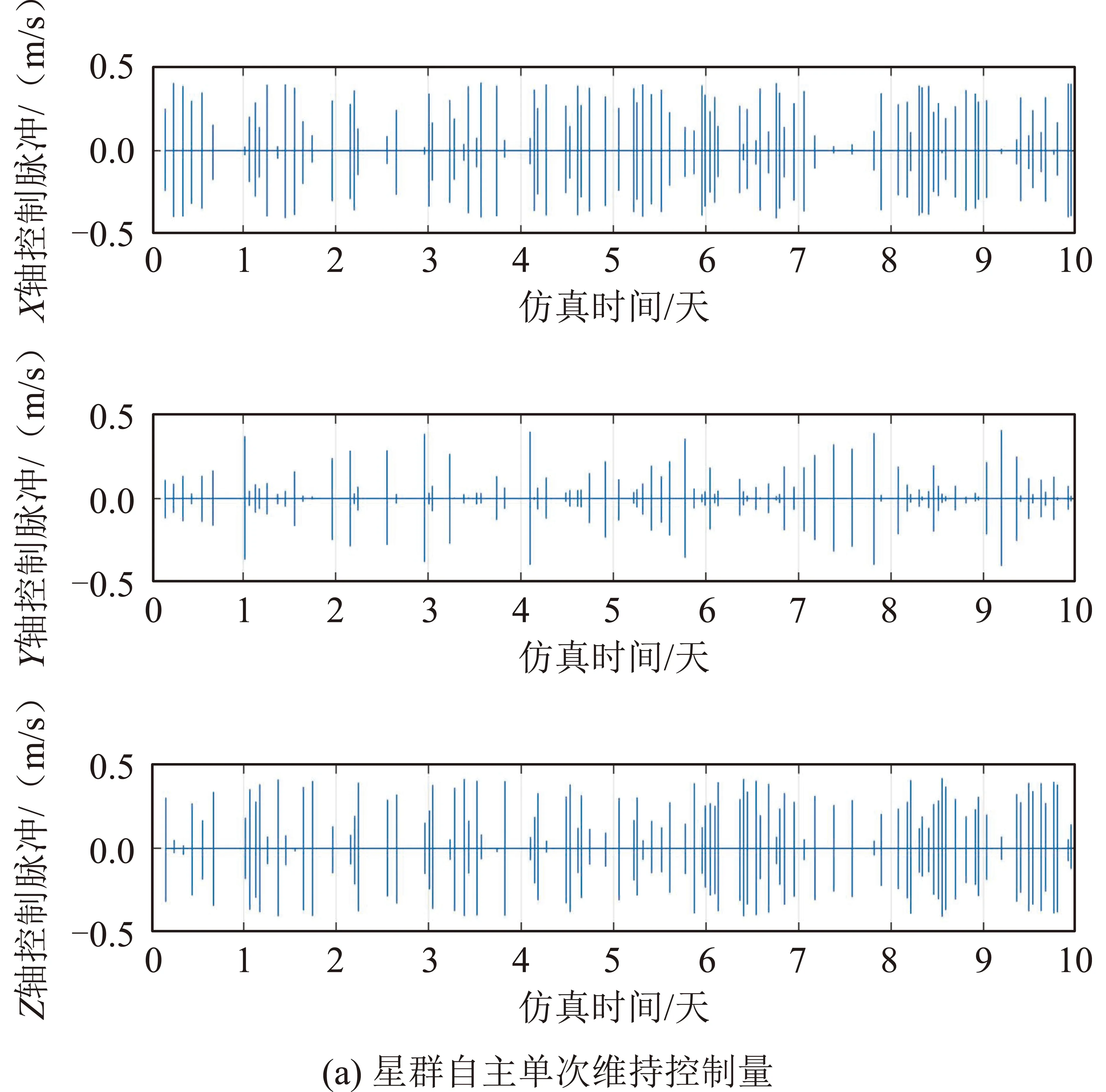
圖11 星群集群自主控制仿真Fig.11 Simulation of satellite swarm autonomous control
4 結束語
本文根據星群運行效能和地面無法單顆逐一管理單星的需求,研究了基于群體智能的微納衛星集群自主控制系統,驗證了微納衛星集群自主控制能力,為推動微納衛星集群在軌應用提供了技術支撐。未來,以基于群體智能微納星群自主控制為研究基礎,進一步發展微納集群星上產品、軟件、算法和標準規范,開展星地端云協同集群應用系統研究,是拓展微納星群在軌應用創新的有效途徑,能夠滿足日益增長的航天復雜任務需求,對提升我國航天裝備能力具有一定意義。
猜你喜歡
開放教育研究(2021年3期)2021-05-25 02:41:06
小學科學(學生版)(2020年12期)2021-01-08 09:28:04
裝備制造技術(2020年4期)2020-12-25 05:26:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
能源(2018年4期)2018-05-19 01:53:44