隨機擾動下車擺系統的實用軌跡跟蹤
2023-05-30 10:48:04鄭嘉璇張會
赤峰學院學報·自然科學版 2023年2期
關鍵詞:系統
鄭嘉璇 張會

摘 要:對于直流電機驅動的車擺系統,本文研究了隨機擾動下參數不確定性的實用軌跡跟蹤問題。基于相對運動和等效電路原理,將系統受到隨機擾動的影響看作轉矩或電壓,通過拉格朗日方程建立受有色噪聲影響的車擺系統的隨機模型。采用backstepping技術、滑模技術和耦合項噪聲分離技術,設計自適應backstepping滑模控制器解決系統的軌跡跟蹤問題。基于隨機系統的穩定性,閉環誤差系統是依概率噪聲到狀態實用穩定(NSpS-P)的,通過調節設計參數,使得跟蹤誤差均方收斂到零的任意小鄰域。仿真結果驗證了所提出控制器的有效性。
關鍵詞:隨機模型;車擺系統;自適應backstepping跟蹤;滑模控制
中圖分類號:O231.3? 文獻標識碼:A? 文章編號:1673-260X(2023)02-0001-07
1 引言
在過去的幾十年里,機械系統在實際的工業生產中有著廣泛的應用。為了獲得更好的系統性能,許多學者提出了一系列有效的控制方法,例如,滑模控制[1,2],魯棒控制[3],自適應控制[4,5]等。車擺系統作為經典機械系統,被廣泛應用于港口、工廠車間等場所。因此,研究車擺系統的軌跡跟蹤控制在工程應用和控制理論中都具有重要意義。Mazenc等人解決了車擺系統的周期軌跡跟蹤問題[6]。張安彩等人構造了車擺系統最優軌跡并設計跟蹤控制律,使得快速跟蹤到所構造的軌跡[7]。而上述研究都是針對確定性的車擺系統,直接將車擺系統的轉矩作為控制輸入。
隨著隨機理論的發展[8],將隨機噪聲合理地引入系統的隨機建模與控制中具有重要的研究意義。由于實際隨機擾動的溫和性,將其描述為平穩過程更為合理。隨機擾動為平穩過程時,吳昭景構建了隨機微分方程系統穩定性的理論框架[9]。針對崎嶇路面下的汽車懸架系統,崔明月等人將粗糙路面對力的影響看作系統受噪聲的干擾,建立了隨機動力學模型并設計了穩定控制器[10]。另一方面,在實踐過程中,基于直流電機的電壓控制作為機械系統的控制輸入比基于轉矩的控制更加合理。針對一類隨機擾動下由直流電機驅動的柔性關節機械臂,崔明月等人提出了建模和軌跡跟蹤控制方案[11]。
本文研究了隨機振動環境下由直流電機驅動的車擺系統的參數不確定性的實用軌跡跟蹤問題。在構建車擺系統的模型時,其耗散力通常會被忽略。本文考慮由線性形式和二次形式組成的阻尼項,在對直流電動機驅動的車擺系統進行隨機建模時,根據動靜法和相對運動原理,將車擺系統所受到隨機擾動的影響視為轉矩,基于等效電路原理,將直流電動機中的熱噪聲描述為電壓。與現有確定性情況下的跟蹤控制方案相比,為了快速消除跟蹤誤差,結合滑模控制和自適應backstepping技術,設計實用軌跡跟蹤控制器,使跟蹤誤差均方收斂于零的任意小鄰域,閉環誤差系統是依概率噪聲到狀態實用穩定的。
2 問題提出和系統建模
2.1 問題提出
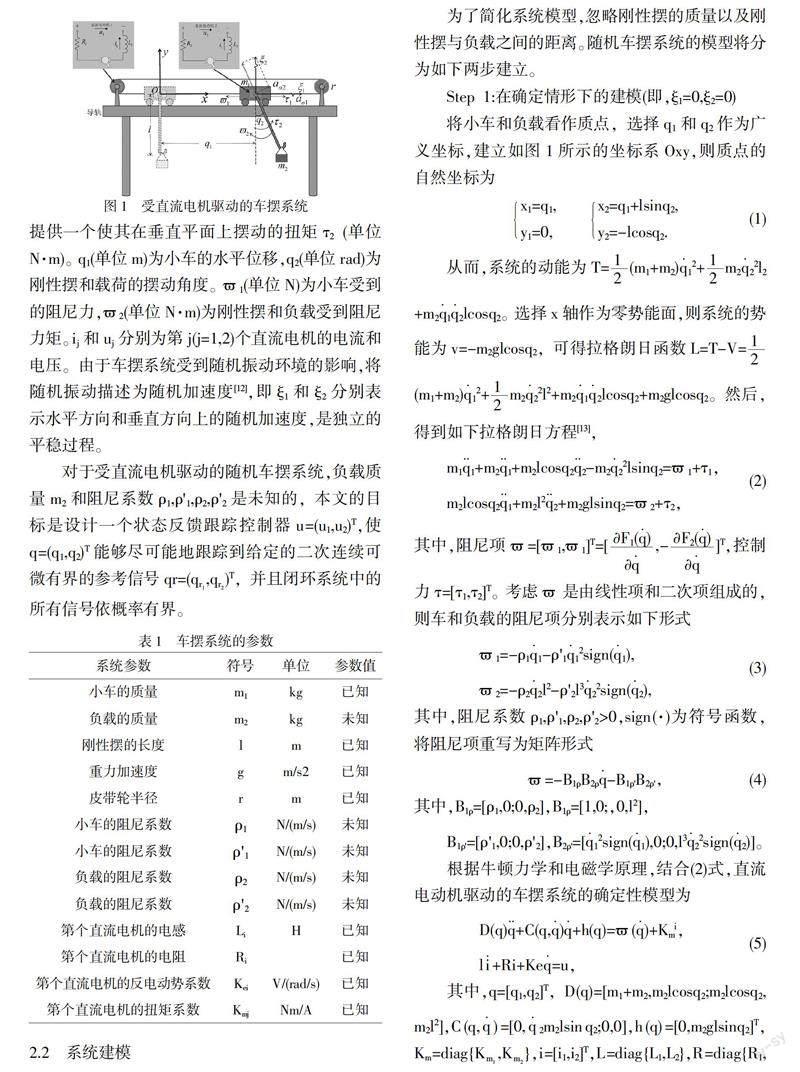
如圖1所示,本文考慮由直流電機驅動的車擺系統,系統處于隨機振動的工作空間,系統參數見表1。位于皮帶輪上的直流電機1為小車提供一個使其沿水平導軌向前滑動的驅動力?子1(單位N),與此同時,位于小車上的直流電機2為剛性擺和負載提供一個使其在垂直平面上擺動的扭矩?子2(單位N·m)。q1(單位m)為小車的水平位移,q2(單位rad)為剛性擺和載荷的擺動角度。?覣1(單位N)為小車受到的阻尼力,?覣2(單位N·m)為剛性擺和負載受到阻尼力矩。ij和uj分別為第j(j=1,2)個直流電機的電流和電壓。由于車擺系統受到隨機振動環境的影響,將隨機振動描述為隨機加速度[12],即?孜1和?孜2分別表示水平方向和垂直方向上的隨機加速度,是獨立的平穩過程。
對于受直流電機驅動的隨機車擺系統,負載質量m2和阻尼系數?籽1,?籽'1,?籽2,?籽'2是未知的,本文的目標是設計一個狀態反饋跟蹤控制器u=(u1,u2)T,使q=(q1,q2)T能夠盡可能地跟蹤到給定的二次連續可微有界的參考信號qr=,并且閉環系統中的所有信號依概率有界。
2.2 系統建模
為了簡化系統模型,忽略剛性擺的質量以及剛性擺與負載之間的距離。隨機車擺系統的模型將分為如下兩步建立。
車擺系統受到環境中隨機振動的影響,選取點O作為參考點。將?孜1和?孜2分別看作點O的水平加速度和垂直加速度。自然地,如圖1所示,在點O分解?孜1和?孜2,有aO1=?孜1和aO2=?孜2sinq2。根據動靜法和相對運動原理,隨機振動對系統的影響可以看作是對控制力和轉矩的擾動,相當于在?子1的方向上引入一個隨機力?子1?孜,在?子2的方向上引入一個隨機矩?子2?孜。即,?子1?孜=-m1?孜1,?子2?孜=-m2l?孜2sinq2。上述方程用矩陣形式表示為
仿真結果如圖2所示。從圖2可以看出,跟蹤誤差在一個小的零鄰域內,這意味著q近似跟蹤到給定的參考信號qr。與此同時,閉環系統中的所有信號都是有界的。仿真結果驗證了該閉環系統控制方案的有效性。
6 結論
本文研究了直流電機驅動的隨機車擺系統的自適應軌跡跟蹤問題。通過拉格朗日力學原理和電磁學建立系統的隨機模型。設計自適應軌跡跟蹤控制器使得跟蹤誤差均方收斂到零的任意小鄰域,并且閉環系統是NSpS-P的。仿真結果驗證了所提出方案的有效性。目前還存在一些需要考慮的問題,如自適應模糊跟蹤控制,有限時間控制。
——————————
參考文獻:
〔1〕Shang D, Li X, Yin M, et al. Dynamic modeling and fuzzy compensation sliding mode control for flexible manipulator servo system[J]. Applied Mathematical Modelling, 2022, 107: 530-556.
〔2〕賀加樂,李宗坡,郭永杰,等.基于滑模控制的機械臂軌跡跟蹤控制[J].自動化應用,2022,19(01):1-4.
〔3〕Patterson Z J, Sabelhaus A P, Majidi C. Robust Control of a Multi-Axis Shape Memory Alloy-Driven Soft Manipulator[J]. IEEE Robotics and Automation Letters, 2022,7(02):2210-2217.
〔4〕Zhan B, Jin M, Liu J. Extended-state-observer-based adaptive control of flexible-joint space manipulators with system uncertainties[J]. Advances in Space Research, 2022(08):69.
〔5〕劉英虎,宋志鵬.機器人自適應控制研究[J].南方農機,2020,51(17):2.
〔6〕Mazenc F, Bowong S. Tracking trajectories of the cart-pendulum system[J]. Automatica,2003, 39(04): 677-684.
〔7〕Zhang A, She J, Qiu J, et al. Design of motion trajectory and tracking control for under-actuated cart-pendulum system[J]. International Journal of Robust and Nonlinear Control, 2019, 29(08): 2458-2470.
〔8〕Krstic M, Deng H. Stabilization of nonlinear uncertain systems[M]. London: Springer, 1998.
〔9〕Wu Z. Stability criteria of random nonlinear systems and their applications[J]. IEEE Trans-actions on Automatic Control, 2014, 60(04): 1038-1049.
〔10〕Cui M, Geng L, Wu Z. Random modeling and control of nonlinear active suspension[J]. Mathematical Problems in Engineering, 2017, 2017:1-8.
〔11〕Cui M, Wu Z. Trajectory tracking of flexible joint manipulators actuated by DC-motors under random disturbances[J]. Journal of the Franklin Institute, 2019, 356(16): 9330-9343.
〔12〕Wu Z, Cui M, Shi P. Backstepping control in vector form for stochastic Hamiltonian systems[J]. SIAM Journal on Control and Optimization, 2012, 50(02): 925-942.
〔13〕Wu Z, Karimi H R, Shi P. Practical trajectory tracking of random Lagrange systems[J]. Automatica, 2019, 105: 314-322.
〔14〕Brown R, Hwang P. Introduction to random signals and applied Kalman filtering[M]. New York, John Wiley & Sons, 1997.
收稿日期:2022-10-11
通訊作者:張會(1986-),山東臨沂人,副教授,博士。研究方向:隨機切換控制,非線性自適應控制,機電系統控制。
基金項目:國家自然科學基金(61703359;62073275)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
