液體火箭發動機推力自動校準系統仿真
2023-05-28 12:48:44恒朱子環
宇航計測技術 2023年2期
關鍵詞:系統
趙 恒朱子環
(北京航天試驗技術研究所,北京 100074)
1 引言
推力架是液體火箭發動機試驗獲取推力的重要裝置。由于工作環境惡劣,為保證測量精度,必須對測試臺架定期校準(標定)[1]。推力測量校準的目的是利用力值加載裝置,模擬發動機推力,從而確定臺架的系統準確度,消除系統誤差。目前力值加載多采用的是液壓加載,由于管路存在滯留空氣和油液泄露等問題,力值難以穩定。
為解決以上問題,提出了一種以伺服電機作為執行機構的推力測量自動校準裝置,采用基于帕斯卡原理的液壓傳動,對控制系統進行設計,基于Matlab/Simulink 和AMEsim 搭建了系統的聯合仿真模型,探究了模糊PID 控制方法在力值加載過程中的性能,驗證了方法的可行性。
2 推力測量校準裝置的工作原理
某臥式液體火箭發動機推力架主要由定架、動架、工作力傳感器、標準力傳感器、彈簧約束件以及各連接管路等組成,如圖1 所示。與發動機推力軸線同軸設置有主油缸,固定于定架上,在結構上保證主油缸輸出推力作用線與標準力傳感器和工作力傳感器同軸安裝[2]。校準開始時,主油缸產生模擬推力帶動動架移動,壓縮彈性約束件和標準力傳感器產生微小位移,由標準傳感器測得模擬推力值。同時,模擬推力通過動架和標準力傳感器傳遞到工作力傳感器上,此時標準力傳感器與工作力傳感器的差值為主要系統誤差[1]。
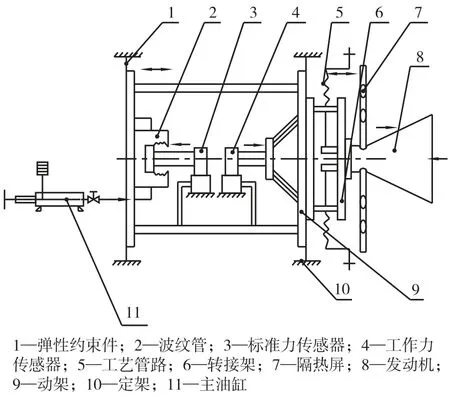
圖1 比對式推力架結構圖Fig.1 Comparison thrust frame structure diagram
力值加載結構根據需求,選取至少6 個標定點(包含零點),通過3 個正反行程,產生可逐級增減變化的模擬推力作用于推力架。主油缸模擬推力的大小由控制系統調節,通過標準力傳感器測量顯示。記錄每個校準點標準力傳感器的輸出電壓值與工作力傳感器輸出電壓值,通過最小二乘擬合得到系統校準曲線,同時可以分析得到系統的綜合不確定度。
實際發動機測試時,主油缸和標準力傳感器與推力測量系統脫開,工作力傳感器的輸出量通過校準曲線轉換成標準傳感器的實際測量值。
3 力值加載系統設計
該力值加載系統主要由交流伺服電機、減速器、滾珠絲杠、控制液壓缸、主液壓缸、蓄能器和標準力傳感器等組成,如圖2 所示。
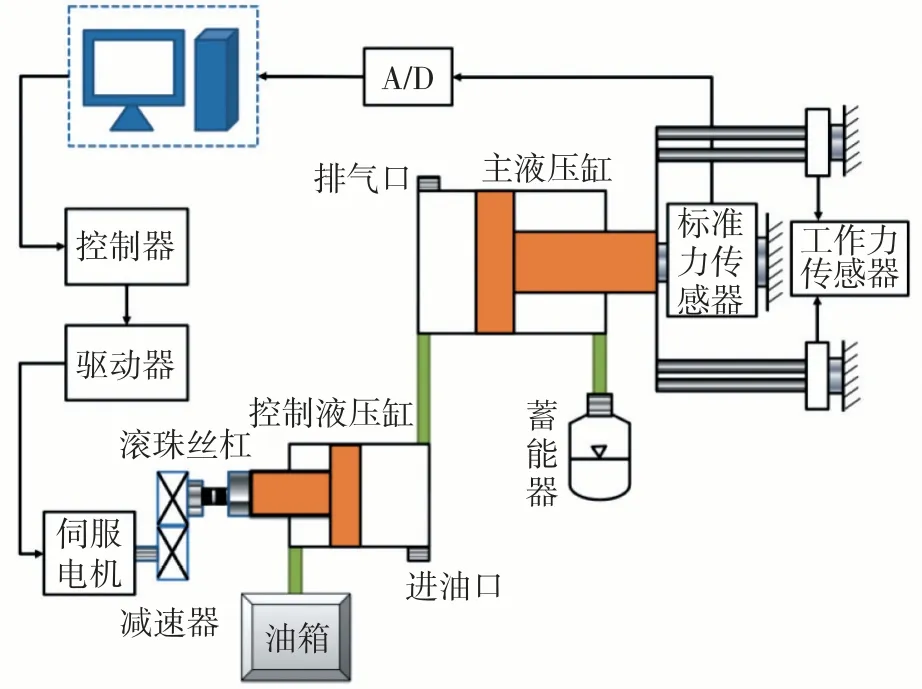
圖2 力值加載系統簡圖Fig.2 Schematic diagram of force value loading system
精密減速器將伺服電機的輸出扭矩放大,以適應負載需要。滾珠絲杠實現回轉運動到直線運動的轉換,用以對加載伺服液壓缸的力值變化進行正或負補償[3]。
控制液壓缸無桿腔通過液壓管道與主液壓缸有桿腔連接,主液壓缸無桿腔與蓄能器連接。
液路系統形成閉式循環,當系統趨于穩定時,根據帕斯卡原理,忽略液壓管道效應,控制液壓缸無桿腔壓力P1和主液壓缸無桿腔壓力P2相等,即P1=P2。假設控制活塞和主活塞的無桿腔工作面積分別為S1、S2,電機在控制油缸活塞施加力為F1,則主油缸活塞所受力值F2為
當控制液壓缸活塞和主液壓缸活塞發生位移分別為X1、X2,體積流量變化較小時,根據體積守恒,有
因此,在系統設計時,當主液壓缸活塞有效面積大于控制液壓缸活塞時,不僅可以將力值進行放大,同時也可以進一步將控制量細分,提高控制系統準確度。
根據力值平衡條件,當系統處于平衡態時,輸出力值F為
式中:P3——主液壓缸有桿腔壓力;S3——主液壓缸有桿腔活塞有效面積。
控制系統由校準上位機、控制器、伺服電機驅動器、數據采集系統、標準力傳感器等組成,如圖3所示。
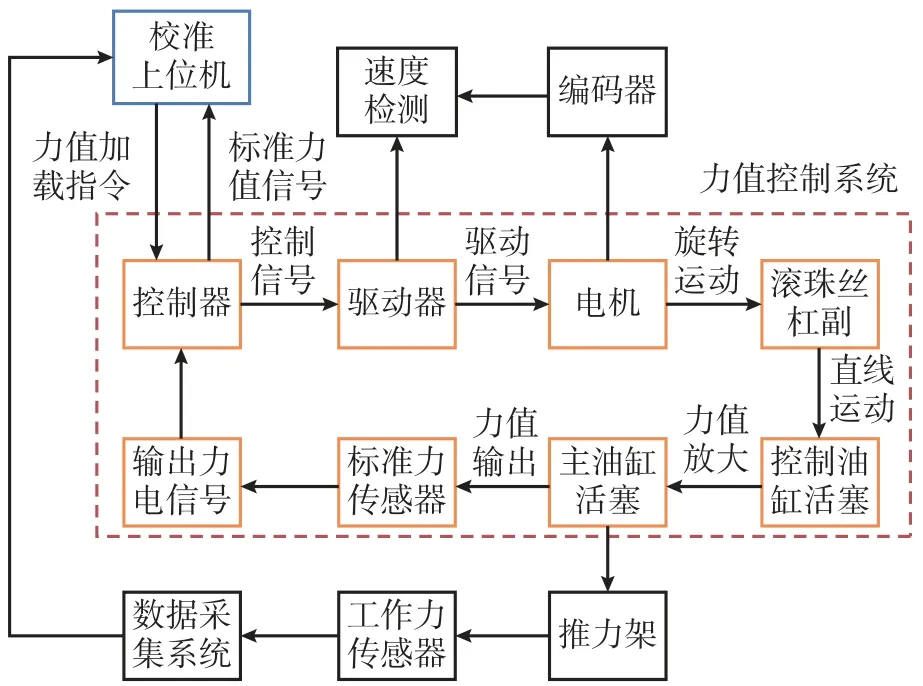
圖3 系統工作原理Fig.3 Principle of system
系統工作時,先將液壓油通過進油口加入控制液壓缸和主液壓缸無桿腔內,當校準指令為加載時,控制器給驅動器和伺服電動機正轉指令,通過減速器傳動滾珠絲杠,滾珠絲杠將電動機的旋轉運動轉換成軸向位移,控制液壓缸的油液通過油路擠入主液壓缸,系統壓力上升。標準力傳感器實時監測輸出力值的大小,并將測量信號反饋給控制器,控制器根據力值加載要求控制伺服電動機正、反轉以及加、減速,以達到調節力值的目的[4]。
4 加載系統數學模型
為了方便控制系統設計以及控制參數的調整,需要對系統進行模塊化建模。
4.1 交流伺服電機
整個系統都依靠伺服電動機提供動力,交流伺服電機柔性較大,能夠滿足力值加載系統給定的各類運動需求,選取電機為永磁同步伺服電機。
根據電動機慣例,交流伺服電機的定子電壓方程表示為
定子磁鏈方程為
磁鏈方程代入電壓方程可得到定子電壓方程為
式中:Ud、Uq——分別為定子電壓的d-q軸分量;id、iq——分別為定子電流的d-q軸分量;R——定子電阻;ψd、ψq——分別為定子磁鏈的d-q軸分量;ωe——電角速度;Ld、Lq——分別為d-q軸電感分量;ψf——永磁體磁鏈[5]。
根據公式(6)可以看出,伺服電機的相電壓已經實現完全解耦,此時的電磁轉矩方程為
式中:Te——電磁轉矩;np——電機極對數。
4.2 減速器及滾珠絲杠
由于減速器與滾珠絲杠與液壓缸相比,頻寬高很多,故其傳遞函數可以簡化為比例環節。
減速器的作用是將高轉速、小轉矩的伺服電機輸出改變為低轉速、大轉矩的執行輸出。設減速器的速比為i,輸入軸轉角為θe,輸出軸轉角為θm,則傳遞函數G1(s)近似為
滾珠絲杠是將伺服電機的旋轉運動轉換成活塞平動的機構,忽略傳動部件及其阻尼。滾珠絲杠一端與減速器輸出軸同軸連接,以θm作為輸入,設步距角為l,其傳遞函數G2(s)近似為
4.3 液壓傳動
建立液壓傳動數學模型前,在保證模型準確的基礎上,建立以下假設[6]:
(1)忽略液壓管道效應和液壓油泄露;
(2)油液的物理性質如黏度、彈性模量等不隨溫度和壓力而變化。
設V1為控制液壓缸無桿腔體積,V2為主液壓缸無桿腔體積,V3為主液壓缸有桿腔體積,V4為蓄能器儲油體積,Vn為蓄能器充氣體積,P1、P2、P3、P4分別為相應腔體壓力,Pn為蓄能器充氣壓力。
依照上述假設,當系統到達平衡狀態時有
當放大液壓缸有液體入主液壓缸時,蓄能器充能,氣囊被壓縮,根據氣體壓縮方程
式中:Vn0——蓄能器初始充氣體積;Pn0——蓄能器初始充氣壓力。
氣體體積變化量ΔVn=Vn0-Vn,在該系統中,蓄能器氣體壓縮是一個連續、緩慢的過程,因此近似有dPn=dP4,根據氣體狀態方程可得
去除極小值,則有
處于動態時,各腔室的流量方程為
式中:βe——油液體積彈性模量;Q1、Q2、Q3、Q4——分別為流入相應腔體的流量。
根據假設,忽略液壓管道效應,各腔體的壓力流量關系可簡化為
聯立公式(14)、公式(15)以及公式(18)~公式(21),忽略極小值,可得
式中:——控制液壓缸活塞進給速度;——主液壓缸活塞進給速度;V01——控制液壓缸無桿腔初始體積;V02——主液壓缸無桿腔初始體積。
聯立公式(13)、公式(16)和公式(17),可以得到
根據牛頓第二定律,主液壓缸的力運動方程為
式中:m2——主液壓缸等效運動質量;Bp——主液壓缸等效粘滯阻尼系數;FL——主液壓缸負載力;——主液壓缸活塞進給加速度。
對公式(22)~公式(24)進行拉普拉斯變換,聯立解得控制液壓缸活塞和主液壓缸活塞兩者的位移關系式為
其中,V0=V01+V02,為液壓缸無桿腔初始充油體積。
4.4 力傳感器
理想的力傳感器模型是典型的二階線性系統,可以等效成活動質量塊、阻尼器與彈簧構成的系統[7]。傳感器等效模型可用二階微分方程表示
式中:ω0——系統固有角頻率;ξ——系統阻尼系數;x——輸入力信號;y——傳感器輸出響應信號;m——等效模型運動質量。
對公式(26)進行拉普拉斯變換有
由于系統的復雜性,實際的傳感器特性很難通過理論確定,故將傳感器考慮成二階阻尼系統。
4.5 仿真驗證
為驗證上述模型的合理性,充分考慮系統中的非線性環節,采用Matlab/Simulink 和AMEsim 進行聯合仿真,AMEsim 主要仿真參數如表1 所示。主液壓缸內徑設置為120 mm,有桿腔活塞桿直徑為60 mm,控制液壓缸內徑設置為60 mm,有桿腔活塞桿直徑為30 mm。
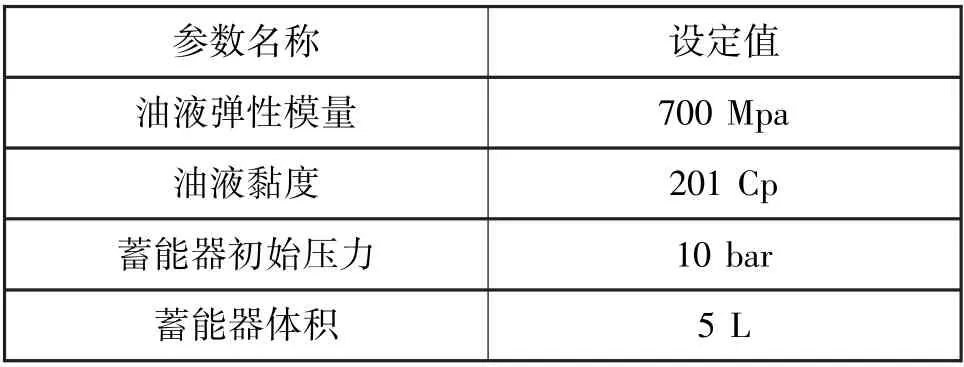
表1 AMEsim 主要仿真參數Tab.1 Main simulation parameters of AMEsim
伺服電機采用id=0 的磁場定向矢量控制。電機極對數np=4,磁鏈ψ=0.171 Wb,定子電感L=4.45 mH,定子電阻R=1.1Ω,阻尼系數B≈0,轉子慣量J=2.27×10-3kg·m2,額定轉速為3 000 r/min。滾珠絲杠導程為4 mm,減速機速比設置為120。
5 模糊PID 控制設計
由于所設計的力值加載系統是一個高階系統,且運行過程中存在很多時變和非線性的影響因素,如液壓油由于長時間工作產生的油液泄漏、粘滯系數改變、阻尼摩擦變化、油液中混有氣泡、油管中空氣未排盡引起的爬行現象等。這些非線性問題難以用數學函數精確地表征,因此設計模糊PID 控制器,實現PID 參數的在線整定。
模糊PID 控制器由模糊控制器和PID 控制器兩部分組成,根據力值加載系統實際情況,采用二維結構模糊控制器,以誤差e和誤差變化率ec為輸入,PID 控制器增量Δkp、Δki、Δkd作為輸出,根據當前的系統誤差e和誤差變化率ec,通過模糊規則推理,對PID 控制器參數進行在線整定,以滿足不同時刻系統對控制性能的要求[8]。
按照以下原則,制定模糊控制規則[9-11]:
當e·ec>0 時,表明誤差在增大,此時控制器應增大輸出,取較大的kp、較小的kd、ki;
當e·ec<0 或者e=0 時,表明誤差在減小或已經達到穩定狀態,此時控制器輸出不變;
當e·ec=0 或者e≠0 時,表明系統存在穩態誤差,此時取較大的kp和ki以及適中的kd。
6 結果分析
表2 為力值加載裝置的主要技術指標,逐級加載至校準力值的150%,力的最大示值誤差為±0.05%,符合推力測量校準力值準確度要求。
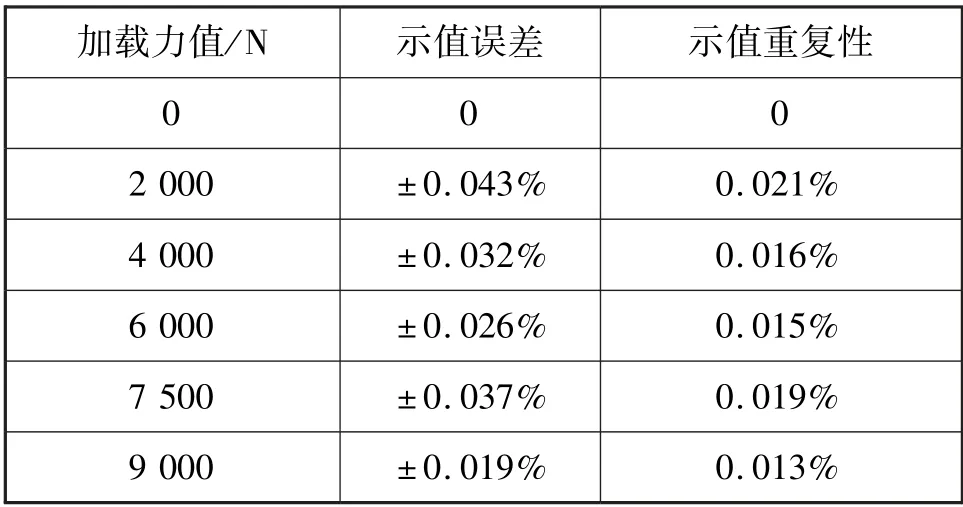
表2 力值加載主要技術指標Tab.2 Main technical indicators of force value loading
給定力值加載命令,如圖4(a)所示,對2 000 N的階梯力,系統能在10 s 內達到穩態。控制液壓缸和主液壓缸活塞位移如圖5(a)所示,根據仿真參數設計,控制液壓缸活塞位移與主液壓缸活塞位移滿足
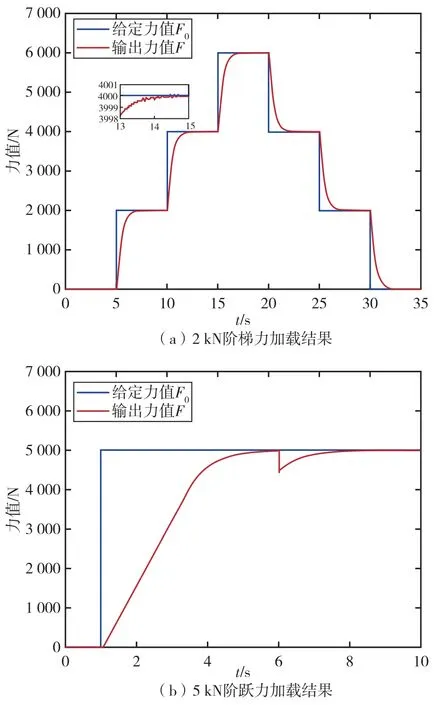
圖4 力值加卸載結果Fig.4 Force value loading and unloading result
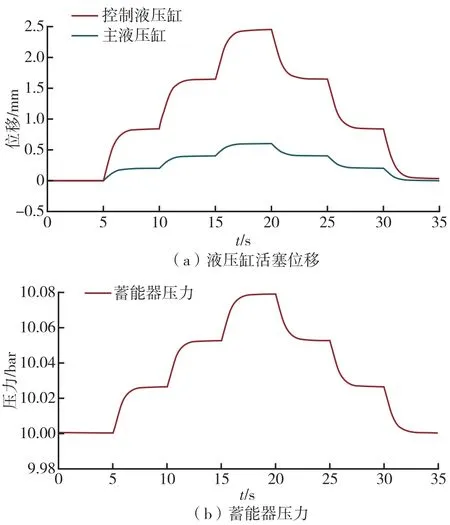
圖5 2 kN 階梯力加載中的液壓缸位移及蓄能器壓力變化Fig.5 Hydraulic cylinder displacement and accumulator pressure change in 2 kN stepped force loading
蓄能器壓力變化如圖5(b)所示,經仿真驗證,主液壓缸有桿腔連接蓄能器,不僅可以推動主液壓缸活塞完成力值卸載過程,同時可以吸收力值加載過程中產生的沖擊力,在系統達到穩態時,維持系統壓力穩定,使系統長時間保持在給定力值附近。
為驗證系統魯棒性,給定5 000 N 階躍力值加載信號,在6 s 加入階躍干擾,模擬出現油液泄露的情況。如圖4(b)所示,力值加載能在3 s 內重新恢復穩定狀態,此時系統壓力變化如圖6 所示,系統壓力在存在干擾的情況下也能夠很快恢復穩定,干擾導致的液壓沖擊也很快被吸收掉。

圖6 5 kN 階躍力加載加干擾后的系統壓力變化Fig.6 System pressure change after adding interference in 5 kN step force loading
根據仿真結果可以發現,所設計的基于模糊PID 控制的力值加載裝置,對加載中的不確定性擾動,進行了實時參數調整,維持了力值輸出的穩定。
以5 000 N 力值加載為例,當系統處于平衡態時,主液壓缸無桿腔壓力為11.970 2 bar,主液壓缸有桿腔壓力為10.065 7 bar,根據主液壓缸設置參數,主液壓缸無桿腔有效作用面積為1.131×10-2m2,主液壓缸有桿腔有效作用面積為0.848 2×10-2m2,輸出力值F為
力值輸出結果符合預期,仿真結果同時驗證了系統結構的可行性和控制算法的有效性。
7 結束語
推力測量原位校準系統是一個帶有隨機干擾的時變系統,力值變化非常復雜,系統的力值輸出準確度是由測量系統、傳動系統和控制系統的準確度共同決定的。當系統結構確定后,力值加載的準確度及效率就取決于控制系統的設計。
從系統構成及原理兩方面詳細闡述了推力測量自動校準裝置的工作過程,通過Matlab/Simulink和AMEsim 聯合仿真,設計了模糊PID 控制器,仿真結果表明,系統響應速度快,在(0~6)kN 范圍內校準力值最大示值誤差為±0.05%,符合校準工作標準,為推力測量自動校準裝置的研制提供了理論依據。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32