運(yùn)載火箭雙維度極性檢查方法與應(yīng)用
2023-05-28 12:49:02董余紅
宇航計(jì)測(cè)技術(shù) 2023年2期
關(guān)鍵詞:設(shè)計(jì)
董余紅 韋 康 李 茂 黃 輝 劉 秉
(1.北京宇航系統(tǒng)工程研究所,北京 100076;2.中國(guó)文昌航天發(fā)射場(chǎng),文昌 571333)
1 引言
運(yùn)載火箭屬于復(fù)雜航天巨系統(tǒng)工程,包含多個(gè)系統(tǒng)及單機(jī),涵蓋氣、液、電、機(jī)械等多種物理性質(zhì)的產(chǎn)品,特別是系統(tǒng)與系統(tǒng)之間、單機(jī)與單機(jī)之間的各項(xiàng)接口,由于設(shè)計(jì)、生產(chǎn)、安裝和測(cè)試的各項(xiàng)工作需要不同崗位人員配合開展,因此接口的正確性尤為重要。在接口的設(shè)計(jì)和安裝過程中,部分物理性質(zhì)相同的接口容易出現(xiàn)雙方定義或理解的不匹配,而由于其測(cè)試數(shù)據(jù)或表征形式較為相似,或很難在地面模擬飛行工況,因此很難通過一般的測(cè)試發(fā)現(xiàn)接口不匹配的錯(cuò)誤,這些具有相同或相似物理表征特性的涉及接口的項(xiàng)目可以統(tǒng)稱為極性問題[1,2]。
從國(guó)內(nèi)外航天型號(hào)出現(xiàn)的極性不匹配典型問題可以看出,運(yùn)載火箭接口極性設(shè)計(jì)及安裝關(guān)系到型號(hào)的飛行成敗。而對(duì)于新研型號(hào),各系統(tǒng)匹配測(cè)試機(jī)會(huì)較少,各項(xiàng)試驗(yàn)及測(cè)試項(xiàng)目與總裝狀態(tài)或飛行工況有一定差別,極性問題凸顯,需要開展相應(yīng)的檢查和確認(rèn)工作,以確保各項(xiàng)設(shè)計(jì)、生產(chǎn)和安裝接口極性得到相應(yīng)的測(cè)試項(xiàng)目驗(yàn)證或關(guān)鍵過程的有效控制,避免出現(xiàn)因極性錯(cuò)誤造成的嚴(yán)重后果。
2 航天型號(hào)極性不匹配典型問題
俄羅斯質(zhì)子號(hào)M 火箭發(fā)射格洛納斯M 衛(wèi)星失利問題就是典型的極性錯(cuò)誤導(dǎo)致的問題。火箭在飛行中發(fā)生故障,火箭控制系統(tǒng)角速度傳感器功能異常,導(dǎo)致偏航控制失穩(wěn),星箭俱毀。根據(jù)調(diào)查結(jié)果,跨部門故障調(diào)查委員會(huì)得出以下結(jié)論:(1)火箭故障的原因是赫魯尼切夫國(guó)家航天科研生產(chǎn)中心違反了質(zhì)子號(hào)M 火箭上的3 個(gè)角速傳感器的安裝工藝,導(dǎo)致角速度傳感器未正確安裝(安裝時(shí)角速度3 傳感器顛倒了180°);(2)按照現(xiàn)有的結(jié)構(gòu)、工藝和操作文件,在地面準(zhǔn)備和試驗(yàn)過程中采用的檢測(cè)方法不能夠查明火箭上角速度傳感器的錯(cuò)誤安裝。
我國(guó)某型火箭曾出現(xiàn)過姿控噴管使用錯(cuò)誤問題。在飛行試驗(yàn)結(jié)果分析過程中發(fā)現(xiàn)末修級(jí)飛行過程出現(xiàn)了姿態(tài)控制異常現(xiàn)象,俯仰、偏航和滾動(dòng)姿態(tài)角在飛行中均異常增大。經(jīng)最終歸零定位,此問題主要由于控制系統(tǒng)對(duì)噴管推力對(duì)應(yīng)關(guān)系的定義存在認(rèn)識(shí)上的偏差,致使姿控噴管使用錯(cuò)誤,進(jìn)而導(dǎo)致姿控噴管燃料提前耗盡,在需要進(jìn)行調(diào)姿時(shí),姿控發(fā)動(dòng)機(jī)沒有推力,無法完成姿態(tài)調(diào)整任務(wù)。
我國(guó)另一型號(hào)運(yùn)載火箭曾在飛行過程中發(fā)生過進(jìn)入末級(jí)滑行段后火箭姿態(tài)失穩(wěn),未能將衛(wèi)星送入預(yù)定軌道的問題,最終故障定位為姿控發(fā)動(dòng)機(jī)電纜網(wǎng)接插錯(cuò)誤。
可見,運(yùn)載火箭研制和生產(chǎn)過程中,若出現(xiàn)極性錯(cuò)誤問題,往往會(huì)產(chǎn)生極為嚴(yán)重的后果,導(dǎo)致任務(wù)失敗。
3 接口極性檢查的工作流程
3.1 全箭功能信息流梳理
在開展接口極性檢查工作中,首先應(yīng)開展全箭功能信息流梳理工作。根據(jù)火箭發(fā)射與飛行的具體功能對(duì)全箭信息傳遞鏈路進(jìn)行分類,形成不同功能的信息流通路。
通過對(duì)信息流通路各接口進(jìn)行梳理分析,形成極性檢查確認(rèn)的具體對(duì)象,包括“制導(dǎo)及姿態(tài)控制回路”、“發(fā)動(dòng)機(jī)時(shí)序控制通路”、“分離時(shí)序通路”等[3,4]。
3.2 雙維度極性檢查方法的提出
各極性檢查確認(rèn)通路大都包含多個(gè)極性環(huán)節(jié)。為確保所有極性相關(guān)環(huán)節(jié)均能得到有效確認(rèn),需尋找一種系統(tǒng)的方法。為此在開展工作時(shí),從總體設(shè)計(jì)部門的頂層設(shè)計(jì)文件開始,到最后總裝依據(jù)的儀器電纜安裝圖紙,可將各極性檢查確認(rèn)通路的各極性環(huán)節(jié)分為兩類,即產(chǎn)品設(shè)計(jì)過程中產(chǎn)生的極性要素(設(shè)計(jì)極性)與產(chǎn)品總裝過程中產(chǎn)生的極性要素(安裝極性)。
設(shè)計(jì)極性指在產(chǎn)品設(shè)計(jì)過程中產(chǎn)生的接口極性,安裝極性指產(chǎn)品在箭體結(jié)構(gòu)上進(jìn)行安裝時(shí)產(chǎn)生的接口極性。安裝極性正確與否將直接影響到功能的正確性,是全箭極性檢查工作的重點(diǎn),包括慣組安裝極性、速率陀螺安裝極性、加表安裝極性、伺服機(jī)構(gòu)安裝極性等。
由此提出基于設(shè)計(jì)極性維度與安裝極性維度的雙維度極性檢查確認(rèn)方法,按照從“設(shè)計(jì)極性”到“安裝極性”的順序開展工作,對(duì)接口極性進(jìn)行全面檢查確認(rèn)。
3.3 雙維度極性檢查方法的工作流程
在對(duì)各極性檢查確認(rèn)通路開展雙維度極性檢查工作時(shí),針對(duì)易出錯(cuò)環(huán)節(jié),提出了如下工作流程,以確保火箭接口極性的正確性。
(1)接口極性設(shè)計(jì)及安裝文件閉環(huán):對(duì)因設(shè)計(jì)文件中定義不確切等易出現(xiàn)歧義的環(huán)節(jié)提出更改建議,如增加文件會(huì)簽單位、新增文件定義內(nèi)容、更改現(xiàn)有文件定義敘述等,并對(duì)后續(xù)文件的更改落實(shí)進(jìn)行閉環(huán)跟蹤和確認(rèn);
(2)接口極性測(cè)試覆蓋性分析:針對(duì)易出現(xiàn)的設(shè)計(jì)和安裝極性錯(cuò)誤,從單機(jī)、系統(tǒng)至全箭測(cè)試項(xiàng)目的內(nèi)容、狀態(tài)及時(shí)機(jī)進(jìn)行測(cè)試覆蓋性分析,提出新增測(cè)試項(xiàng)目的設(shè)置及測(cè)試狀態(tài)更改建議,提高火箭接口極性測(cè)試覆蓋性,確保可在發(fā)射前預(yù)先發(fā)現(xiàn)極性不匹配問題;
(3)關(guān)鍵過程控制點(diǎn)設(shè)置:在測(cè)試覆蓋性分析的基礎(chǔ)上,針對(duì)無法通過測(cè)試覆蓋及影響全箭關(guān)鍵功能的項(xiàng)目,設(shè)置關(guān)鍵過程控制點(diǎn),通過多崗位專業(yè)人員聯(lián)合確認(rèn),包括三維模裝、現(xiàn)場(chǎng)安裝等環(huán)節(jié),確保接口極性正確、匹配。
4 雙維度極性檢查方法的應(yīng)用步驟
4.1 全箭功能信息流梳理分析
以箭體姿態(tài)控制功能為例,火箭飛行過程中,箭載計(jì)算機(jī)通過安裝在箭體結(jié)構(gòu)上的激光慣組、光纖慣組、速率陀螺和加表敏感箭體的姿態(tài)信息計(jì)算控制指令,并將指令發(fā)送至各級(jí)伺服控制器及附加控制器。伺服控制器根據(jù)指令完成伺服機(jī)構(gòu)的控制,附加控制器根據(jù)時(shí)序完成姿控發(fā)動(dòng)機(jī)電磁閥的控制[5,6],姿控通路信息流如圖1 所示。
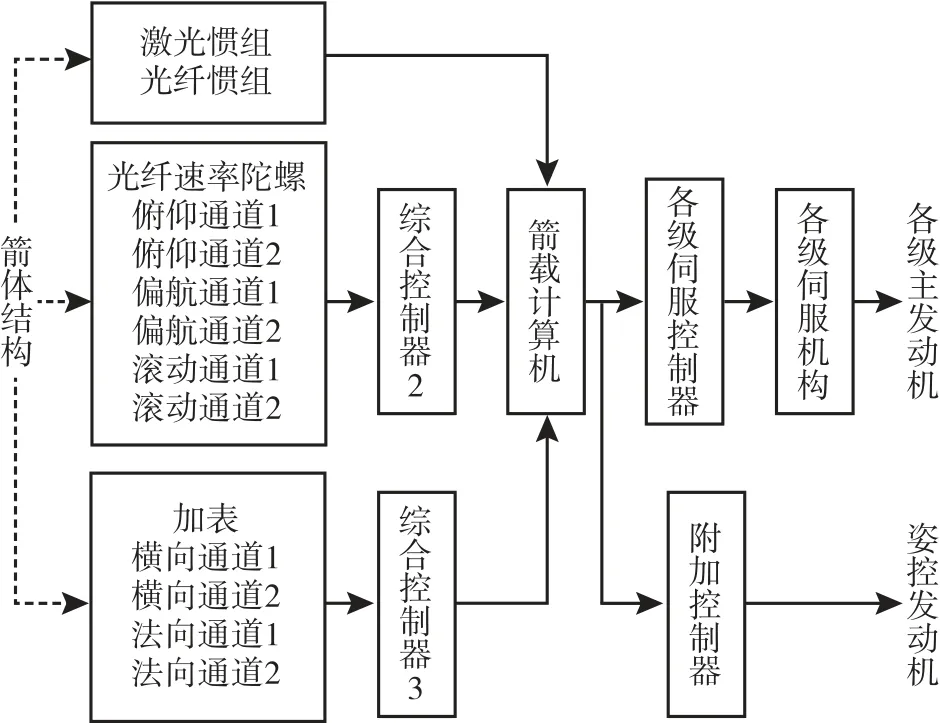
圖1 姿控通路信息流圖Fig.1 Information flow of attitude control paths
4.2 設(shè)計(jì)與安裝極性環(huán)節(jié)檢查確認(rèn)
以伺服機(jī)構(gòu)極性環(huán)節(jié)為例,開展設(shè)計(jì)極性和安裝極性雙維度檢查確認(rèn)。
4.2.1 伺服機(jī)構(gòu)極性環(huán)節(jié)的設(shè)計(jì)過程
伺服機(jī)構(gòu)極性環(huán)節(jié)的設(shè)計(jì)過程為:
(1)姿控系統(tǒng)總體設(shè)計(jì)部門與發(fā)動(dòng)機(jī)設(shè)計(jì)部門、伺服機(jī)構(gòu)設(shè)計(jì)部門協(xié)調(diào)確認(rèn)發(fā)動(dòng)機(jī)1、2 分機(jī)與伺服機(jī)構(gòu)A、B 分機(jī)定義,落實(shí)在發(fā)動(dòng)機(jī)設(shè)計(jì)任務(wù)書和控制系統(tǒng)設(shè)計(jì)任務(wù)書中,并輸出給控制系統(tǒng)研制部門;
(2)控制系統(tǒng)研制部門向結(jié)構(gòu)系統(tǒng)總體設(shè)計(jì)部門輸出控制系統(tǒng)箭上設(shè)備總布置圖;
(3)結(jié)構(gòu)系統(tǒng)總體設(shè)計(jì)部門根據(jù)箭上設(shè)備總布置圖向總裝車間提出各部段儀器電纜安裝總裝圖,并同時(shí)將伺服機(jī)構(gòu)研制部門提供的伺服機(jī)構(gòu)安裝要求輸出至總裝車間;
(4)總裝車間根據(jù)結(jié)構(gòu)總體設(shè)計(jì)部門的相關(guān)文件完成總裝工作。
上述每個(gè)過程均為極性相關(guān)環(huán)節(jié)。
4.2.2 接口極性設(shè)計(jì)及安裝文件閉環(huán)
4.2.2.1 設(shè)計(jì)極性檢查確認(rèn)
在控制系統(tǒng)設(shè)計(jì)任務(wù)書中,規(guī)定了與發(fā)動(dòng)機(jī)和伺服機(jī)構(gòu)相關(guān)的極性,明確了:“I、IV 象限間為1 號(hào)發(fā)動(dòng)機(jī);II、III 象限間為2 號(hào)發(fā)動(dòng)機(jī);靠近芯級(jí)軸線的伺服機(jī)構(gòu)為B 分機(jī)”。
在發(fā)動(dòng)機(jī)設(shè)計(jì)任務(wù)書中有如下規(guī)定:“位于Ⅰ、Ⅳ象限間為Ⅰ分機(jī);位于Ⅱ、Ⅲ象限間為Ⅱ分機(jī)。”在發(fā)動(dòng)機(jī)與伺服機(jī)構(gòu)接口要求文件中給出發(fā)動(dòng)機(jī)的安裝布局,經(jīng)確認(rèn),控制系統(tǒng)設(shè)計(jì)任務(wù)書和它是完全匹配的,極性表述含義正確。
伺服控制指令分別通過一級(jí)伺服控制器的接插件21B、21C、21D、21E,電纜B111、B112、B113、B114,接插件33A1、34A1、33A2、34A2 發(fā)送給兩套共4 臺(tái)一級(jí)伺服機(jī)構(gòu),如圖2 所示。
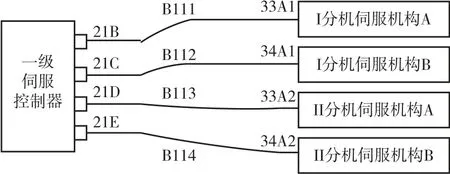
圖2 一級(jí)伺服控制器與伺服機(jī)構(gòu)連接布置圖Fig.2 Connection layout of first-level servo controller and servo mechanism
根據(jù)對(duì)控制系統(tǒng)設(shè)計(jì)情況的檢查確認(rèn),伺服控制器的四個(gè)控制指令輸出端口與伺服機(jī)構(gòu)通過獨(dú)立的電纜一一對(duì)應(yīng),不會(huì)出現(xiàn)對(duì)應(yīng)錯(cuò)誤的情況。
4.2.2.2 安裝極性檢查確認(rèn)
在箭體結(jié)構(gòu)設(shè)計(jì)要求文件中明確了:“位于Ⅰ、Ⅳ象限間為Ⅰ分機(jī),位于Ⅱ、Ⅲ象限間為Ⅱ分機(jī)”,與發(fā)動(dòng)機(jī)任務(wù)書和控制系統(tǒng)設(shè)計(jì)任務(wù)書均一致。
結(jié)構(gòu)總體設(shè)計(jì)部門在伺服機(jī)構(gòu)安裝技術(shù)要求文件中明確了如下事項(xiàng):
一級(jí)兩套伺服機(jī)構(gòu)A、伺服機(jī)構(gòu)B:2 臺(tái)伺服機(jī)構(gòu)A 呈對(duì)角線安裝,2 臺(tái)伺服機(jī)構(gòu)B 呈背靠背安裝。
伺服機(jī)構(gòu)裝箭前,不區(qū)分伺服機(jī)構(gòu)A1 與A2、伺服機(jī)構(gòu)B1 與B2。裝箭后,通過對(duì)伺服機(jī)構(gòu)控制插座33A 與34A、電機(jī)插座34E 進(jìn)行標(biāo)記,以對(duì)伺服機(jī)構(gòu)A1 與A2、伺服機(jī)構(gòu)B1 與B2 進(jìn)行區(qū)分。在原刻字標(biāo)記33A、34A 和34E 后,用紅色漆筆標(biāo)記“1”、“2”字樣,具體標(biāo)記如下:
(a)安裝在第Ⅰ象限的伺服機(jī)構(gòu)A 為A1,原插座標(biāo)記處增加“1”:33A→33A1;
(b)安裝在第Ⅳ象限的伺服機(jī)構(gòu)B 為B1,原插座標(biāo)記處增加“1”:34A→34A1,34E→34E1;
(c)安裝在第Ⅲ象限的伺服機(jī)構(gòu)A 為A2,原插座標(biāo)記處增加“2”:33A→33A2;
(d)安裝在第Ⅱ象限的伺服機(jī)構(gòu)為B2,原插座標(biāo)記處增加“2”:34A→34A2,34E→34E2。
4.2.3 接口極性測(cè)試覆蓋性分析
通過測(cè)試來確認(rèn)設(shè)計(jì)極性及安裝極性的正確性是最直接的確認(rèn)過程。伺服機(jī)構(gòu)接口極性測(cè)試覆蓋性分析如表1 所示。

表1 伺服機(jī)構(gòu)接口極性測(cè)試覆蓋性分析表Tab.1 Test coverage of design polarity and installation polarity of servo mechanism
4.2.4 關(guān)鍵過程控制點(diǎn)設(shè)置
伺服機(jī)構(gòu)安裝過程中安裝極性的關(guān)鍵過程控制點(diǎn)如表2 所示。
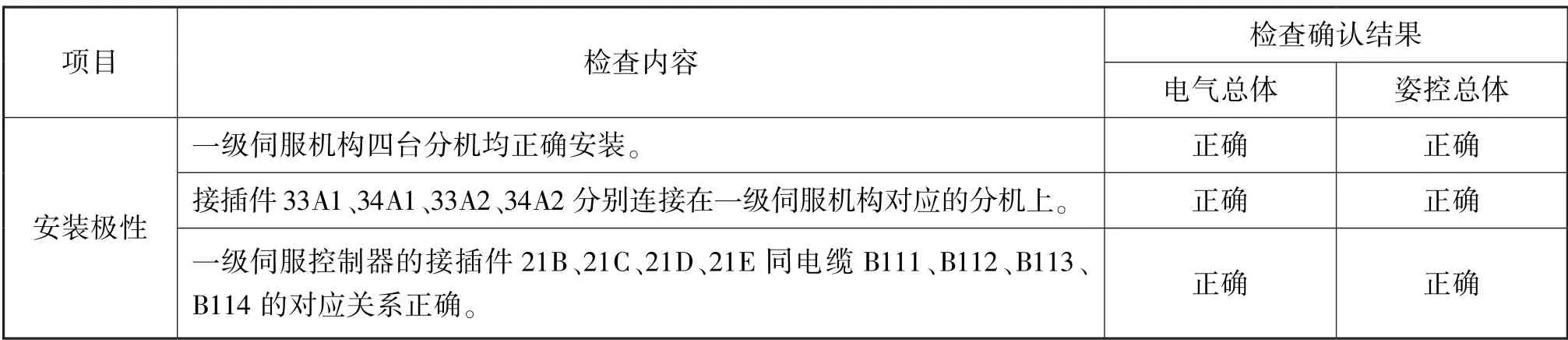
表2 伺服機(jī)構(gòu)安裝極性的關(guān)鍵過程控制點(diǎn)Tab.2 Key process control points of servo mechanism installation polarity
4.2.5 小結(jié)
以箭體姿態(tài)控制功能為例,給出了雙維度極性檢查方法的應(yīng)用步驟。首先開展全箭功能信息流梳理分析,給出姿控系統(tǒng)功能信息流圖,在此基礎(chǔ)上,通過接口極性設(shè)計(jì)及安裝文件閉環(huán)、接口極性測(cè)試覆蓋性分析和關(guān)鍵過程控制點(diǎn)設(shè)置的工作,完成了接口極性的閉環(huán)檢查確認(rèn)。
5 結(jié)束語(yǔ)
提出了一種基于雙維度的運(yùn)載火箭全箭極性檢查方法,該方法基于接口極性設(shè)計(jì)及安裝文件閉環(huán)、測(cè)試覆蓋性分析及關(guān)鍵環(huán)節(jié)有效控制的全流程極性檢查項(xiàng)目的工作思路,加強(qiáng)了極性設(shè)計(jì)狀態(tài)和產(chǎn)品安裝實(shí)現(xiàn)的閉環(huán)管控,已經(jīng)率先在新一代大型運(yùn)載火箭實(shí)現(xiàn)了對(duì)全箭極性設(shè)計(jì)、生產(chǎn)、安裝和測(cè)試環(huán)節(jié)全過程的有效閉環(huán)管控,確保了運(yùn)載火箭電氣系統(tǒng)接口極性的設(shè)計(jì)正確和協(xié)調(diào)匹配。
猜你喜歡
河北畫報(bào)(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04