一種基于多目標(biāo)約束下的UUV 航跡規(guī)劃算法
2023-05-14 09:58:44韓喜紅丁天明鄭海林
艦船科學(xué)技術(shù) 2023年8期
韓喜紅,丁天明,鄭海林,劉 虎,鞠 拓
(浙江海洋大學(xué) 船舶與海運(yùn)學(xué)院,浙江 舟山 316022)
0 引 言
無人水下航行器(unmanned underwater vehicle,UUV)憑借操縱靈活、可控性好、航行時(shí)間長(zhǎng)等優(yōu)勢(shì),被廣泛應(yīng)用于執(zhí)行各種任務(wù),如海洋環(huán)境數(shù)據(jù)采集、海洋資源勘探、通信中繼、反潛警戒、水下偵察與監(jiān)視、海洋工程和海底電纜檢測(cè)等[1–3]。具有智能化、程度高和成本低的優(yōu)點(diǎn),可以代替人類執(zhí)行水下危險(xiǎn)任務(wù)。
UUV 因自身結(jié)構(gòu)的限制,其大多采用“人在回路中”的控制方式[4],但是UUV 在水下航行中易受到風(fēng)、浪和流等外界因素的影響,特別是在惡劣的海洋環(huán)境下,通信環(huán)境受到干擾,通信可靠性降低[5],造成通信中斷。因此在復(fù)雜海洋環(huán)境下工作的UUV 必須要求具備一定的自主航行控制能力和自主校正能力,以適應(yīng)航行過程中復(fù)雜變化的海洋環(huán)境[6]。另一方面精確的導(dǎo)航與定位技術(shù)是UUV 完成水下航行任務(wù)的關(guān)鍵因素,目前,UUV 的導(dǎo)航定位主要采用慣性導(dǎo)航系統(tǒng)[7],其在航行的過程中會(huì)產(chǎn)生位置誤差,定位系統(tǒng)無法對(duì)自身進(jìn)行準(zhǔn)確定位,誤差會(huì)隨著時(shí)間累積,當(dāng)誤差積累到一定值時(shí),將導(dǎo)致航行任務(wù)失敗[8]。航跡規(guī)劃技術(shù)是實(shí)現(xiàn)UUV 自主航行并完成水下任務(wù)的關(guān)鍵,其主要思想是在特定的環(huán)境中,規(guī)劃出一條滿足約束條件、目標(biāo)最優(yōu)的航跡。隨著控制技術(shù)的發(fā)展,多約束條件航跡快速規(guī)劃越來越重要,國內(nèi)外學(xué)者對(duì)航跡規(guī)劃問題進(jìn)行了大量研究,并取得了一定成果。其中常用的方法有Dijkstra算法[9]、人工勢(shì)場(chǎng)法[10]、模擬退火算法[11]、A*算法[12]等,本文主要從航跡規(guī)劃、轉(zhuǎn)向角、校正定位3 個(gè)方面建立模型,提出一種基于最小轉(zhuǎn)向角搜索算法,并對(duì)算法的有效性對(duì)比討論。
1 問題描述及模型的構(gòu)建
1.1 問題描述
UUV 在水下執(zhí)行任務(wù)時(shí),可能會(huì)遇到惡劣的海洋環(huán)境,其通信受到影響,無法定位自身位置,定位誤差累積增加,將會(huì)造成航行任務(wù)失敗。航行區(qū)域中存在水平和垂直校正點(diǎn),即用于校正定位誤差的安全位置,且UUV 航跡轉(zhuǎn)向點(diǎn)都在所給的校正點(diǎn)上,每次校正只能選取一個(gè)方向,需要在復(fù)雜海洋環(huán)境條件下找出一條滿足以下條件的最優(yōu)航跡:
1)UUV 的航跡長(zhǎng)度盡可能的短;
2)經(jīng)過校正點(diǎn)的次數(shù)盡可能的少;
3)UUV 在轉(zhuǎn)彎時(shí)受到自身機(jī)動(dòng)性能的限制,無法突然改變前進(jìn)方向,其轉(zhuǎn)向角應(yīng)在一定的限制范圍內(nèi),考慮到航跡的光滑度,要求轉(zhuǎn)向角盡可能的小,UUV 允許的最大轉(zhuǎn)向角為 ψmax。
1.2 UUV 模型構(gòu)建
UUV 自起點(diǎn)A經(jīng) 過n個(gè)校正點(diǎn)航行至終點(diǎn)B,經(jīng)過校正點(diǎn)時(shí)進(jìn)行誤差校正,建立以起點(diǎn)A為圓心,r為半徑的球形可航行區(qū)域,球形區(qū)域內(nèi)的誤差校正點(diǎn)為待選校正點(diǎn)。由誤差校正和轉(zhuǎn)向角度約束可知,求待選節(jié)點(diǎn)P0時(shí) ,P點(diǎn)距離A點(diǎn)距離最近、轉(zhuǎn)向角最小的點(diǎn)會(huì)被優(yōu)先選中,經(jīng)過校正點(diǎn)校正后該方向的誤差校正為0,另一方向誤差保持不變,尋找到第二個(gè)校正點(diǎn)P2時(shí) ,以P2為 圓心r為半徑劃分球形可航行區(qū)域,在可航行區(qū)域內(nèi)選擇下一個(gè)校正點(diǎn),重復(fù)選取過程直至終點(diǎn)B。選取過程如圖1 所示。

圖 1 校正點(diǎn)選取示意圖Fig. 1 Correction point selection schematic
1.3 數(shù)學(xué)模型構(gòu)建
已知UUV 的起點(diǎn)和終點(diǎn),要使航跡長(zhǎng)度盡可能短,滿足約束條件下構(gòu)建數(shù)學(xué)模型。本文設(shè)計(jì)一條經(jīng)過若干校正點(diǎn)航跡長(zhǎng)度最短的軌跡,使得在航經(jīng)校正點(diǎn)處誤差不斷校正,從而能順利達(dá)到終點(diǎn)。A(x0,y0,z0)表示起點(diǎn)坐標(biāo),Pi(xi,yi,zi) 表示第i個(gè)校正點(diǎn)坐標(biāo)i=1,2,···n,終 點(diǎn) 坐 標(biāo) 表 示 為B(xn+1,yn+1,zn+1) ,μ表 達(dá) 校正點(diǎn)的類型。

表 1 符號(hào)變量說明Tab. 1 Symbolic variable description
1)目標(biāo)函數(shù)
要使航跡長(zhǎng)度盡可能短,即目標(biāo)函數(shù)為:

式中:d(0,1)為起點(diǎn)A到第一個(gè)校正點(diǎn)P1的距離;d(n,n+1)為 第n個(gè) 校正點(diǎn)Pn到 終點(diǎn)B的距離;d(i,i+1)為校正點(diǎn)Pi到校正點(diǎn)Pi+1的距離。

2)校正條件約束
第1 個(gè)約束條件是校正次數(shù)盡可能少:在起點(diǎn)A(x0,y0,z0) 時(shí)UUV 的垂直和水平誤差均為0,即r0=0,s0=0 。UUV 前進(jìn) 1 m,誤差增加 δ個(gè)單位,航行器 從 第Pi?1個(gè) 校 正點(diǎn) 到Pi校 正 點(diǎn) 的 距 離 為di?1,i,產(chǎn) 生的 積 累 誤 差 為 δdi?1,i,同 時(shí) 在 到 達(dá) 校 正 點(diǎn)Pi時(shí) 含 有i?1個(gè)未校正的原始誤差 。
因此,校正前該點(diǎn)的垂直誤差ri為 積累誤差δdi?1,i與 原 始 誤 差ri?1之 和,水平誤差si為 積 累 誤 差 δdi?1,i與原始誤差si?1之 和,垂直誤差ri和 水平誤差si可以表示為:

當(dāng)μ=1 時(shí),進(jìn)行垂直誤差校正,α1和 α2為滿足垂直誤差校正的垂直和水平誤差最大值,校正條件為:

校正后:

當(dāng) μ=0 時(shí),進(jìn)行水平誤差校正,β1和 β2為滿足水平誤差校正的垂直和水平誤差最大值,校正條件為:

校正后:

到達(dá)終點(diǎn)時(shí)垂直和水平誤差均滿足以下條件:

由式(4)~ 式(9)可知校正誤差隨著航行距離增加,因此,可以把誤差校正約束轉(zhuǎn)化為待選點(diǎn)間距離約束。
3)轉(zhuǎn)向角條件約束


圖 2 轉(zhuǎn)向角約束示意圖Fig. 2 Diagram of steering angle constraint


考慮到UUV 的操縱性能,當(dāng)轉(zhuǎn)向角大于90°時(shí),操縱及為困難,且在海底存在暗流的復(fù)雜情況下,控制過彎的失誤率明顯增加,航行過程中還要減少航跡折返的情況,因此在航跡規(guī)劃時(shí)各校正點(diǎn)處轉(zhuǎn)向角越小的點(diǎn)應(yīng)該優(yōu)先考慮,在滿足校正條件和偏轉(zhuǎn)角約束下建立目標(biāo)函數(shù)。
1.4 算法步驟及流程
步驟1以A 為起點(diǎn),求待選點(diǎn)到A 點(diǎn)的距離d(A,Pi)。
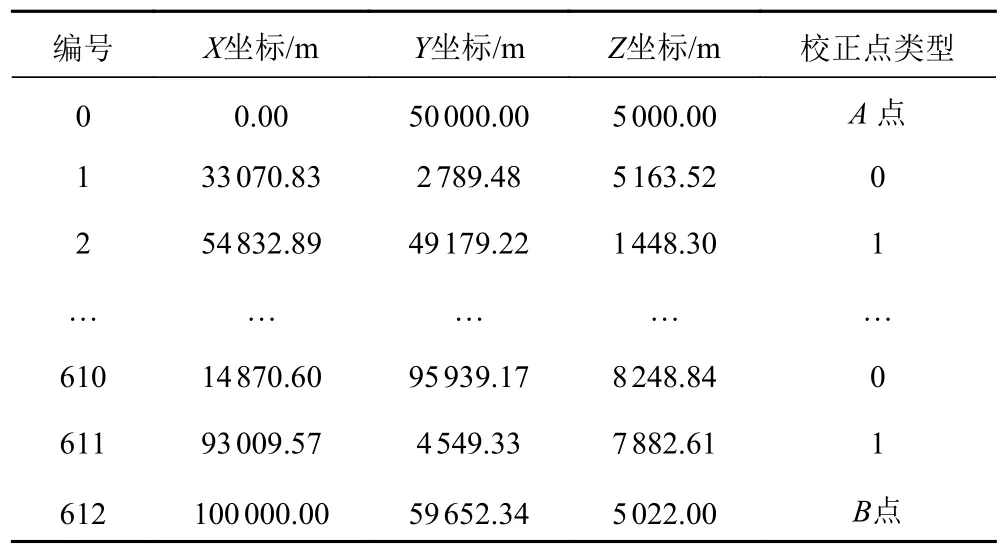
條件1:判斷待選點(diǎn)是否定在以r為半徑的可行域內(nèi)d(A,Pi) 步驟2求當(dāng)前點(diǎn)到待選點(diǎn)偏向夾角 ψi,在可行域內(nèi)選取 ψi最小的點(diǎn),進(jìn)行水平或垂直校正,作為下次迭代的起點(diǎn)。 步驟3從當(dāng)前點(diǎn)出發(fā)到終點(diǎn)B 的航跡距離是否滿足條件3,如果滿足,則輸出最終航跡,停止迭代,如若不能到達(dá)B 點(diǎn),迭代次數(shù)加 1,返回步驟 1。 具體算法流程如圖3 所示。 圖 3 航跡規(guī)劃算法流程Fig. 3 Route planning algorithm flow 根據(jù)上述模型和算法,其參數(shù)分別設(shè)置為 α1=25 ,α2=15 ,β1= 20,β2= 25 ,θ = 30 ,δ = 0.001 ,起點(diǎn)坐標(biāo)A(0,50000,5000), 終點(diǎn)坐標(biāo)B(10000,59652.34,5022),校正點(diǎn)數(shù)量共612 個(gè),坐標(biāo)參數(shù)如表2 所示。 表 2 部分校正點(diǎn)坐標(biāo)Tab. 2 Correction point coordinates 基于表2 數(shù)據(jù),針對(duì)上述2 種約束條件,調(diào)整半徑10000~20000 m,利用 Matlab 數(shù)值模擬仿真,可以得出不同調(diào)整半徑r對(duì)應(yīng)的校正點(diǎn)次數(shù)和航跡長(zhǎng)度。由圖4 可知,基于距離約束時(shí),調(diào)整半徑小于11000 m得不到航跡規(guī)劃結(jié)果,當(dāng)調(diào)整半徑r=14000 m 時(shí)航跡長(zhǎng)度最短,調(diào)整半徑r=18000 m 時(shí)校正點(diǎn)次數(shù)最少。基于距離和轉(zhuǎn)向角約束情況下,當(dāng)r=14000 m 時(shí)校正次數(shù)為8,航跡長(zhǎng)度為106350 m,此后再增加調(diào)整半徑的值,路徑長(zhǎng)度不再減少,校正次數(shù)不變,比基于單一距離約束下的算法提前達(dá)到最優(yōu)。 圖 4 不同調(diào)整半徑對(duì)比圖Fig. 4 Comparison of different adjusting radius 基于航跡長(zhǎng)度約束條件仿真實(shí)驗(yàn)數(shù)據(jù)對(duì)比,結(jié)果見表3。可知,當(dāng)調(diào)整半徑r小于10000 m 時(shí),由于球形可航行區(qū)域內(nèi)的點(diǎn)減少,找不到滿足校正條件的待選點(diǎn),無法得到仿真結(jié)果。當(dāng)調(diào)整半徑r=14000 m時(shí),航跡長(zhǎng)度最短為128909 m,總轉(zhuǎn)向角度最小為523.46。當(dāng)調(diào)整半徑r=18000 m 時(shí),校正點(diǎn)最少為11 次,與r=14000 m 相比,校正次數(shù)減少了2 次,但航跡長(zhǎng)度增加1206 m,為了直觀呈現(xiàn)路徑平滑度,做出二維航跡平面圖。 表 3 不同調(diào)整半徑對(duì)比結(jié)果Tab. 3 Comparison results of different adjustment radius 如圖5 所示,在只考慮航跡長(zhǎng)度約束的算法下,航跡路徑上的校正點(diǎn)會(huì)出現(xiàn)從起點(diǎn)到終點(diǎn)方向的折回、相鄰、平行的現(xiàn)象。當(dāng)r=12000 m 時(shí),航跡平面圖出現(xiàn)6 次折回和 1 次相鄰的現(xiàn)象,校正點(diǎn)次數(shù)多達(dá)18 次,航跡長(zhǎng)度為143331 m,第5 個(gè)校正點(diǎn)偏向角最大為121.80°;當(dāng)r=13000 m 時(shí),航跡平面圖出現(xiàn)3 次折回、1 次平行和1 次相鄰的現(xiàn)象,校正點(diǎn)次數(shù)為16 次,航跡長(zhǎng)度為144041 m,第13 個(gè)校正點(diǎn)偏向角最小為4.52°;當(dāng)r=14000 m 時(shí),航跡平面圖出現(xiàn)1 次折回和1 次相鄰現(xiàn)象;當(dāng)r=18000 m 時(shí),航跡平面圖出現(xiàn)2 次折回現(xiàn)象,航跡最靠近AB 直線方向,該算法達(dá)到最優(yōu),此后再增加調(diào)整半徑r的值,航跡長(zhǎng)度和校正次數(shù)不在減少。 圖 5 不同調(diào)整半徑的航跡規(guī)劃平面圖Fig. 5 Plane diagram of route planning with different adjustment radius 在航跡長(zhǎng)度約束的基礎(chǔ)上增加轉(zhuǎn)向角約束條件對(duì)比數(shù)據(jù)分析,其具體結(jié)果見表4。 由表4 可知,調(diào)整半徑r增大時(shí),航跡長(zhǎng)度變短,校正點(diǎn)次數(shù)減少,總轉(zhuǎn)向角度變小。當(dāng)半徑r達(dá)到14000 m 時(shí),再次增加調(diào)整半徑r的大小,其航跡長(zhǎng)度、校正點(diǎn)個(gè)數(shù)和總轉(zhuǎn)向角保持不變,說明算法達(dá)到最優(yōu)值,為了直觀呈現(xiàn)路徑平滑度,做出二維航跡平面圖。 表 4 不同調(diào)整半徑對(duì)比結(jié)果Tab. 4 Comparison results of different adjustment radius 如圖6 所示,當(dāng)r=11000 m 時(shí),校正點(diǎn)次數(shù)多達(dá)13次,所得的航跡長(zhǎng)度為115848 m,總轉(zhuǎn)向角度為349.24°,第10 個(gè)校正點(diǎn)轉(zhuǎn)向角最大,最大值為64.34°;當(dāng)r=12000 m 時(shí),校正點(diǎn)次數(shù)為10 次,所得的航跡長(zhǎng)度為111306 m, 總轉(zhuǎn)向角度為202.87°,與r=11000 m 相比,校正點(diǎn)減少3 次,總轉(zhuǎn)向角減少146.37°,當(dāng)r=13000 m時(shí) ,經(jīng)過9 個(gè)校正點(diǎn),所得的航跡長(zhǎng)度為111926 m,與r=12000 m 時(shí)的航跡對(duì)比,雖然校正次數(shù)減少1 次, 但航跡距離增加620 m, 當(dāng)r=14000 m 時(shí),經(jīng)過的校正點(diǎn)8 個(gè),所得的航跡長(zhǎng)度為106350 m,第7 個(gè)校正點(diǎn)轉(zhuǎn)向角最小,最小值為5.22°,總轉(zhuǎn)向角度變小為120.66°,UUV 航行軌跡為A-521-64-80-170-278-369-214-397-B,航跡方向最接近直線AB,得到最優(yōu)解。 圖 6 不同調(diào)整半徑的航跡規(guī)劃圖Fig. 6 Path planning with different adjustment radius 結(jié)果表明,在合理范圍調(diào)整半徑r,能夠有效縮短航跡長(zhǎng)度,減少校正次數(shù)和總轉(zhuǎn)向角度。如表5 所示,對(duì)比2 種方法,當(dāng)考慮轉(zhuǎn)向角約束條件時(shí),校正次數(shù)為8 次,優(yōu)于單一路徑最短規(guī)劃方法的11 次,路徑長(zhǎng)為106350 m,相較于單一路徑最短規(guī)劃方法的130115 m,其規(guī)劃航跡長(zhǎng)度減少了23765 m,航跡平滑沒有折回、比鄰、平行的情況,滿足UUV 在水下復(fù)雜環(huán)境中的航跡規(guī)劃,圖7 為2 種約束條件下對(duì)應(yīng)的最優(yōu)三維航跡圖。 表 5 兩種方法對(duì)比Tab. 5 Comparison of two methods 圖 7 不同約束下最優(yōu)三維空間航跡圖Fig. 7 Optimal three-dimensional space trajectory under different constraints 本文圍繞UUV 在復(fù)雜海洋環(huán)境中航行時(shí)誤差校正問題,建立單目標(biāo)函數(shù),根據(jù)約束條件的不同,在基于單一航跡長(zhǎng)度最短規(guī)劃基礎(chǔ)上,提出考慮轉(zhuǎn)向角約束的最小轉(zhuǎn)向角航跡規(guī)劃算法,通過對(duì)比可以發(fā)現(xiàn),考慮轉(zhuǎn)向角約束條件時(shí),航跡長(zhǎng)度明顯縮短,校正次數(shù)減少,路徑光滑,滿足航行要求。
2 仿真實(shí)驗(yàn)

2.1 基于航跡長(zhǎng)度約束數(shù)據(jù)分析


2.2 基于轉(zhuǎn)向角約束數(shù)據(jù)分析




3 結(jié) 語
