基于雷達組合多模型聯合火箭彈徑向速度預測
2023-05-12 03:18:20常華俊冷雪冰段鵬偉
彈箭與制導學報 2023年2期
關鍵詞:模型
田 珂,雷 紅,常華俊,冷雪冰,段鵬偉
(63861部隊,吉林白城 137001)
0 引言
常規兵器試驗中,通常利用彈道測量雷達測試火箭彈主動段的飛行坐標,同時利用連續波雷達測試火箭彈主動段的徑向速度。正常情況下,兩臺雷達能夠全程測試火箭彈全彈道飛行坐標和徑向速度。但是有時連續波雷達參試中途會因為設備老化出現死機、人為操作失誤等突發故障,此時雷達就會出現測試異常,導致錯過對某段時間徑向速度的準確捕捉。此外,火箭彈在高空飛行過程中由于自身原因或者遇上大風等不良天氣時,飛行軌跡就會短暫偏離雷達波束輻射范圍,就會缺失該段的數據;當理論彈道本身存在偏差時,雷達一開始就會按照錯誤的彈道軌跡進行布站和調參,同樣會導致無法全程準確捕捉目標。上述問題最后都會導致連續波雷達無法準確測試出火箭彈某時間段的徑向速度,數據的缺失會在一定程度上影響對火箭彈相關指標的準確測試和毀傷效能的準確評估。針對這些問題,建立合理的模型預測出缺失的徑向速度并對數據進行重構就非常必要。目前有很多研究彈丸徑向速度的文獻[1-3]:文獻[1]主要研究如何對彈丸徑向速度進行實時高精度處理,前提是雷達能夠完整捕獲到彈丸的徑向速度,并未考慮彈丸徑向速度缺失時的解決辦法;文獻[2]提出了在彈丸徑向速度缺失時,利用回歸模型預測出缺失的數據,但其主要研究的是大口徑彈丸,并未提到小口徑彈丸的解決辦法,也沒有考慮單項模型預測精度不理想的情況;文獻[3]研究的是根據徑向速度檢測低速目標的問題,前提依然是獲取到部分徑向速度,當徑向速度不完整時該方法無法應用。以上文獻都是研究的普通炮彈,普通炮彈出炮口后在慣性作用下進行運動,而火箭彈在出炮口后是在火箭推力的作用下進行運動,所以文獻[1-3]所提方法對火箭彈不一定適用。由于火箭彈在主動段受到多種作用力的影響,其徑向速度存在微小波動,這些波動特征既包含線性變化,也包含一定的非線性變化,所以單純利用傳統單一模型進行預測,預測精度往往很難得到保證。雖然傳統時間序列模型可以根據數據的變化趨勢進行后期預測,但是只能按照時間先后順序進行預測,當遇到多段徑向速度出現缺失且缺失前的樣本數據量又很少時,預測精度將大打折扣,所以傳統方法存在一定應用限制。
為解決以上不足,進行兩點創新:一是選擇把兩臺雷達的數據進行深度融合,即使樣本數據量不夠多,也可以建立適合的模型提高預測精度,而且也不用再考慮射擊彈丸口徑大小的問題,因為不論火箭彈是大口徑還是小口徑,主動段都會受到發動機的推力作用,徑向速度變化規律基本一致,兩臺雷達進行數據融合的方法是通用的,而且針對所建樣本融合數據,也可以引入更多的模型進行預測,不再受限于時間序列模型,為建立組合模型奠定基礎。此外,文獻[2]研究的是大口徑彈丸,大小口徑彈丸出炮口后的運動規律會有一定區別,但是同樣可以將彈道測量雷達的坐標與連續波雷達的徑向速度進行融合,根據徑向速度的變化規律建立適合的模型進行預測,所建模型可能略有區別,但方法和思路是通用的,解除了只能建立單一模型進行預測的限制,拓寬了預測方法,提高了預測精度。兩臺雷達數據融合的具體原理是:彈道測量雷達與連續波雷達測試的是同一發火箭彈,前者測試飛行坐標,后者測試徑向速度,坐標中的射程x與橫偏z基本上都是線性變化,與徑向速度有共同的變化特征,同時徑向速度又存在一定的非線性特征,所以選擇把彈道坐標作為特征向量,徑向速度作為目標向量,分別建立徑向速度與射程的一元線性回歸模型、徑向速度與橫偏的一元線性回歸模型、徑向速度與射程和橫偏的支持向量回歸機模型,線性回歸模型負責挖掘出線性成分,支持向量回歸機負責挖掘出非線性成分。神經網絡具有非常強的復雜非線性系統建模能力,但是需要大量的樣本數據才能訓練充分[4],所以選擇利用支持向量回歸機挖掘出非線性成分[5]。此外,支持向量回歸機的預測精度容易受到核函數參數的影響,所以使用遺傳算法對核函數參數進行尋優搜索,最后再建立遺傳算法優化(least square support vector machine,LSSVM)模型。
二是得到4個模型預測值后再根據組合模型建模原理計算出組合模型預測值,具體原理是:計算出每個模型每期預測值與實測值的誤差平方,然后建立預測值與誤差平方的一元線性回歸模型,再把剩余部分預測值帶入到所建回歸模型中,就可以預測出對應的誤差平方,最后再利用預測出的誤差平方,計算出每個模型每期預測值對應的權系數,每期預測值乘以對應的權系數再相加,就得到了多模型聯合預測值。實驗結果表明,多模型聯合預測值與對應實測值的平均絕對百分比誤差為0.065%,小于1‰,也小于GM(1,1)(grey model,GM)灰色模型等對比模型的預測誤差,達到了連續波雷達測試火箭彈徑向速度的誤差要求,所采用的方法可以用來預測火箭彈的徑向速度。
1 一元線性回歸模型原理
一元線性回歸模型是描述兩個變量之間相互關系(線性關系)的模型,該模型假設因變量y只受到一個自變量x的影響,它們之間存在類似線性函數的關系,用一元線性回歸方程可表示為[6]:
y=αx+b+ε
(1)
式中α和b是回歸系數。
一元線性回歸方程的目的是找出一條直線,使所有的樣本數據盡可能的落在它的附近。對一元線性回歸方程預測結果進行檢驗:1)檢驗方程的顯著性。根據F檢驗法對應的概率p值與臨界統計值的比較結果進行判定,如果概率p值遠小于臨界統計值0.05,說明回歸模型是顯著的,即所建立的一元線性回歸模型成立,否則回歸模型不顯著,即模型不成立;2)檢驗模型的擬合效果。如果檢驗結果顯示multiple R-squared和adjusted R-squared兩個參數均非常接近1,說明模型的擬合效果很好,否則說明模型擬合效果并不好,需要重新調整模型;3)檢驗回歸系數的顯著性。如果回歸系數對應的概率p值遠小于臨界統計值0.001,說明回歸系數是顯著的,否則不顯著,需要重新調整模型。
2 支持向量回歸機原理

(2)
(3)
3 遺傳算法優化LSSVM原理
針對線性問題,最小二乘支持向量機的優化目標為求解公式(4)的最小值。
(4)
引入拉格朗日函數并對相關參數求導,得到最小二乘支持向量機的回歸函數與公式(2)和(3)基本一致。核函數參數和正則化參數是影響最小二乘支持向量機性能的敏感參數,通過合理的選擇,可以提升最小二乘支持向量機的泛化能力。而遺傳算法可以很好的對這兩個參數進行優化。遺傳算法(genetic algorithm,GA)是一種模擬自然界生物進化過程來搜索最優解的方法,按照確定的適應度函數,采用遺傳算子對種群中的個體進行操作,通過在個體間不斷交換染色體信息使種群得以進化,最終使適應值好的個體得以保留,把適應值差的個體淘汰掉。遺傳算法優化核函數參數和正則化參數的過程:先設定核函數參數和正則化參數的尋優范圍,同時設定遺傳算法適應度函數、基因變異的概率、種群規模、進化代數等參數,然后輸入訓練數據和測試數據,用遺傳算法對兩個參數進行尋優操作,檢驗是否達到迭代次數,如果達到了設定的迭代次數,利用搜尋出的最優參數建立最優的LSSVM模型,否則重新調整模型。利用遺傳算法搜索LSSVM核函數參數與正則化參數的步驟如圖1所示。
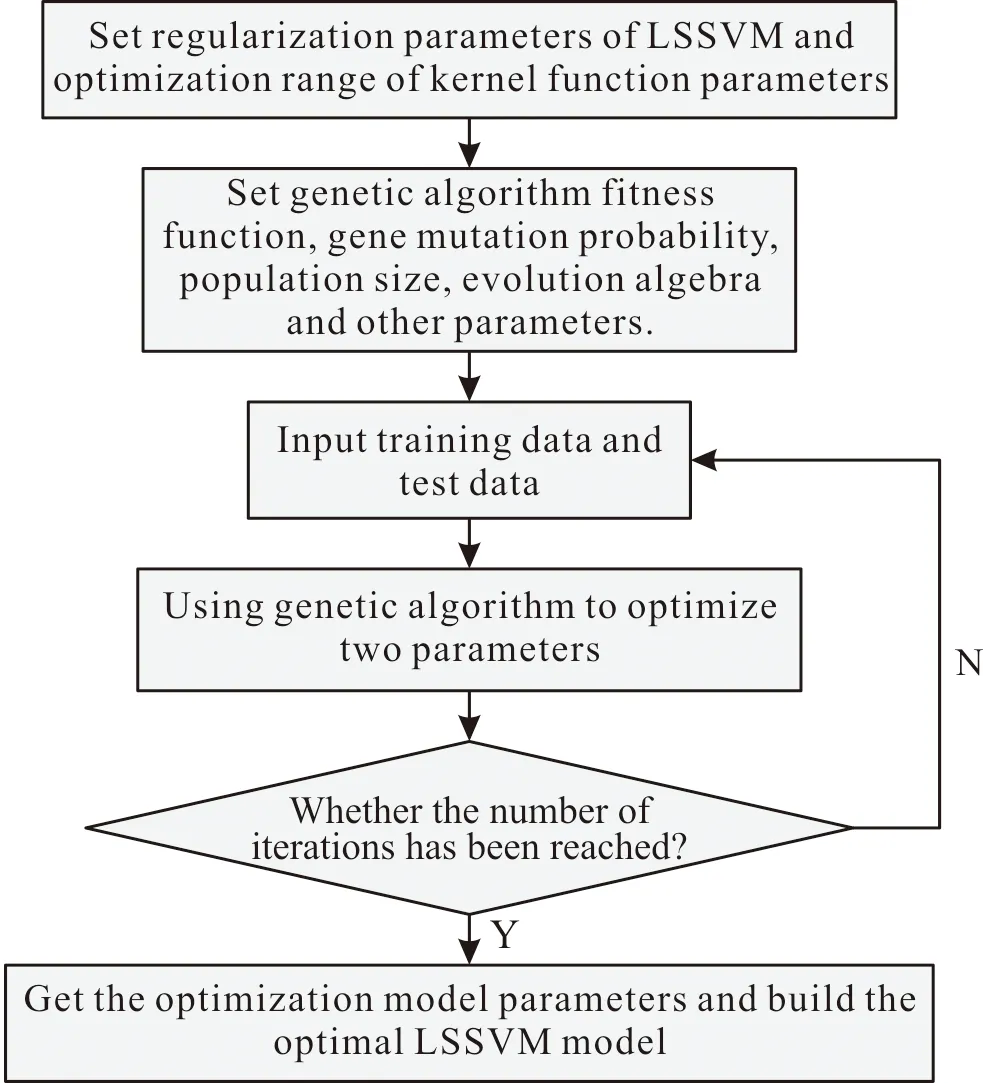
圖1 遺傳算法優化LSSVM參數的過程Fig.1 Process of optimizing LSSVM parameters by genetic algorithm
4 雷達組合與多模型聯合原理

(5)
(6)
(7)
(8)
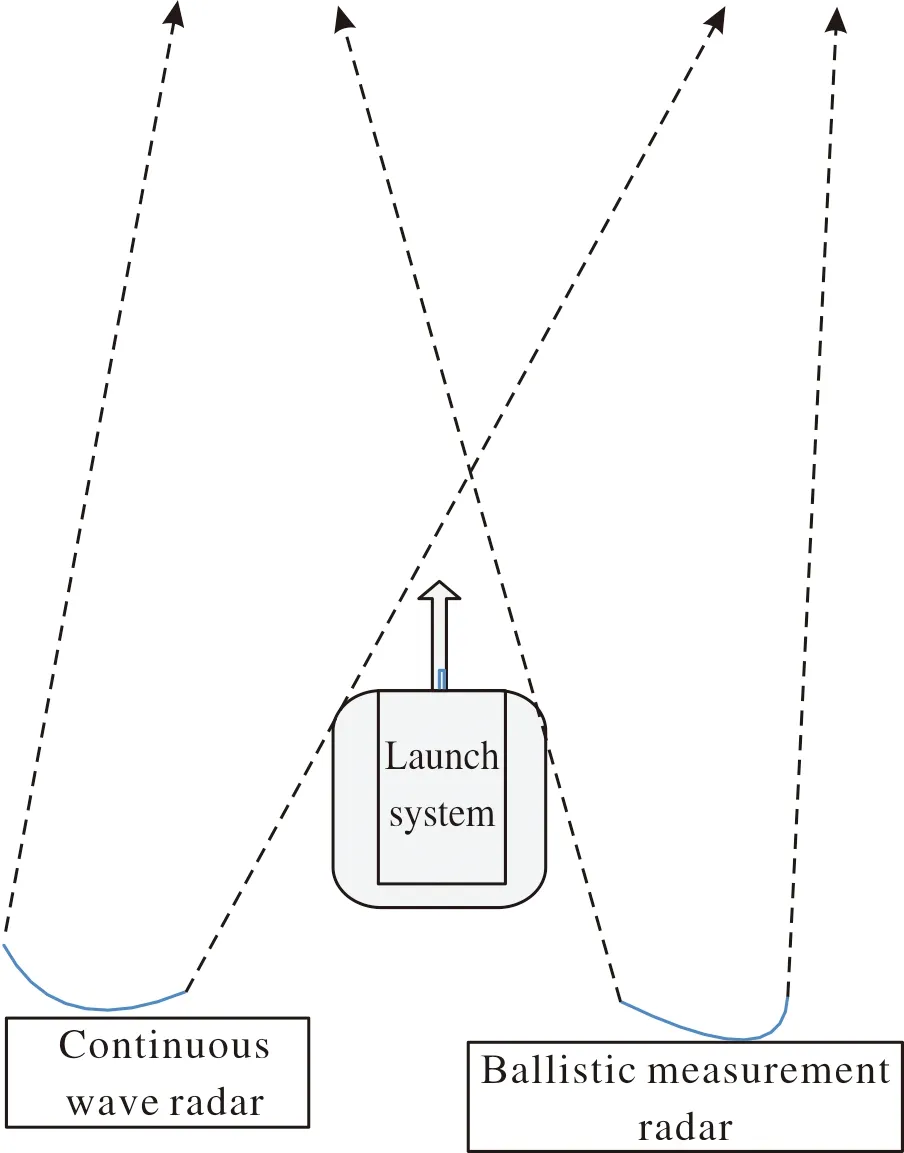
圖2 雷達現場布站示意圖Fig.2 Schematic diagram of radar site layout
5 實驗驗證
選擇利用RStudio軟件環境進行數據分析、統計建模及數據可視化。雷達測試火箭彈徑向速度較為完整的瀑布圖如圖3所示,徑向速度存在缺失的瀑布圖如圖4所示。由于在工程實踐中,出現過在10.1~12.0 s雷達跟丟彈丸的情況,所以選擇利用彈道測量雷達和連續波雷達共同測試的火箭彈飛行坐標和徑向速度實測值進行建模預測,具體如圖5所示,徑向速度按照統一標準對原始數據進行了數量級處理。由于射程、橫偏與徑向速度的取值范圍偏差較大,為了提高模型收斂速度,避免取值對模型精度的影響,采用式(9)對所有數據進行了歸一化處理[10]。
(9)
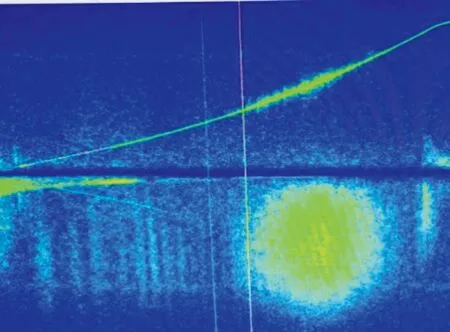
圖3 徑向速度完整的瀑布圖Fig.3 Complete waterfall diagram of radial velocity
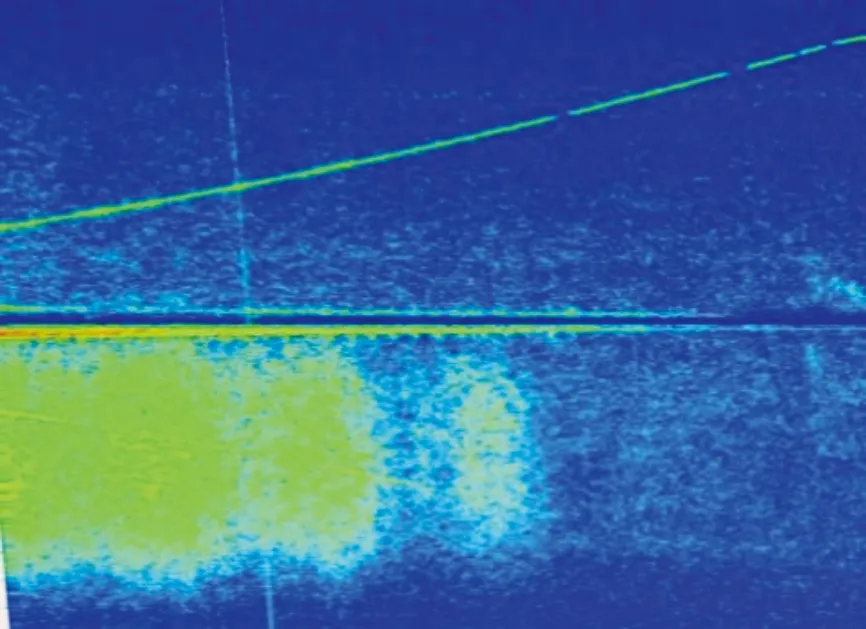
圖4 徑向速度存在殘缺的瀑布圖Fig.4 Incomplete waterfall diagram of radial velocity
圖5(a)、圖5(b)分別是彈道測量雷達測試的火箭彈飛行坐標中射程、橫偏與時間的關系曲線,每個數據點的時間間隔是0.1 s,共有120個數據點;圖5(c)是連續波雷達測試的火箭彈徑向速度與時間的關系曲線,每個速度點的時間間隔是0.1 s,共有120個速度點;圖5(d)和圖5(e)分別是徑向速度與射程、橫偏之間的關系曲線;圖5(f)是徑向速度與射程和橫偏的三維關系曲線。可以看出連續波雷達測試的徑向速度與彈道測量雷達測試的射程、橫偏基本上呈線性關系,初步判斷適合建立一元線性回歸模型。
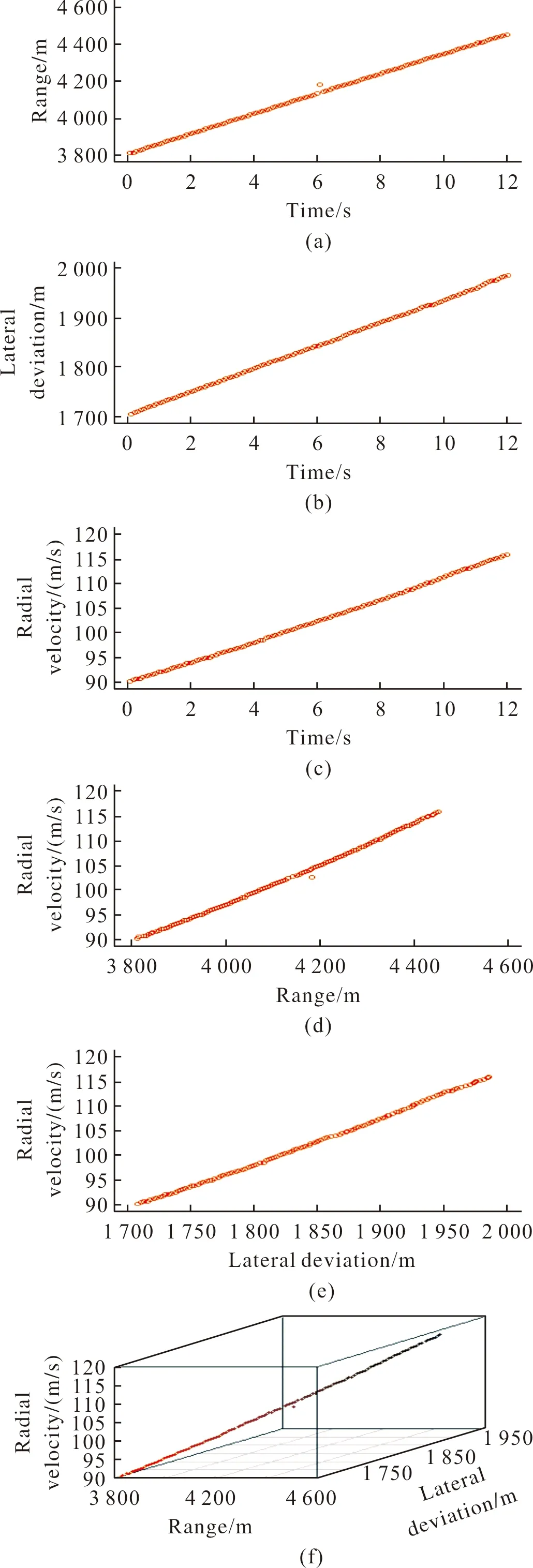
圖5 彈道測量雷達和連續波雷達測試的坐標和徑向速度關系圖Fig.5 Relationship between coordinates and radial velocity of ballistic measurement radar and continuous wave radar
首先進行數據探索,發現射程中第61個數據點屬于離群點,刪除該離群點,同時建立射程與時間的一元線性回歸模型,預測出射程第61個數據點進行插值,插入值為4 139.245,然后繪制徑向速度與射程和橫偏的3維立體關系曲線如圖6所示,可以看出刪除離群點并插入預測值后徑向速度與射程和橫偏依然呈線性關系。
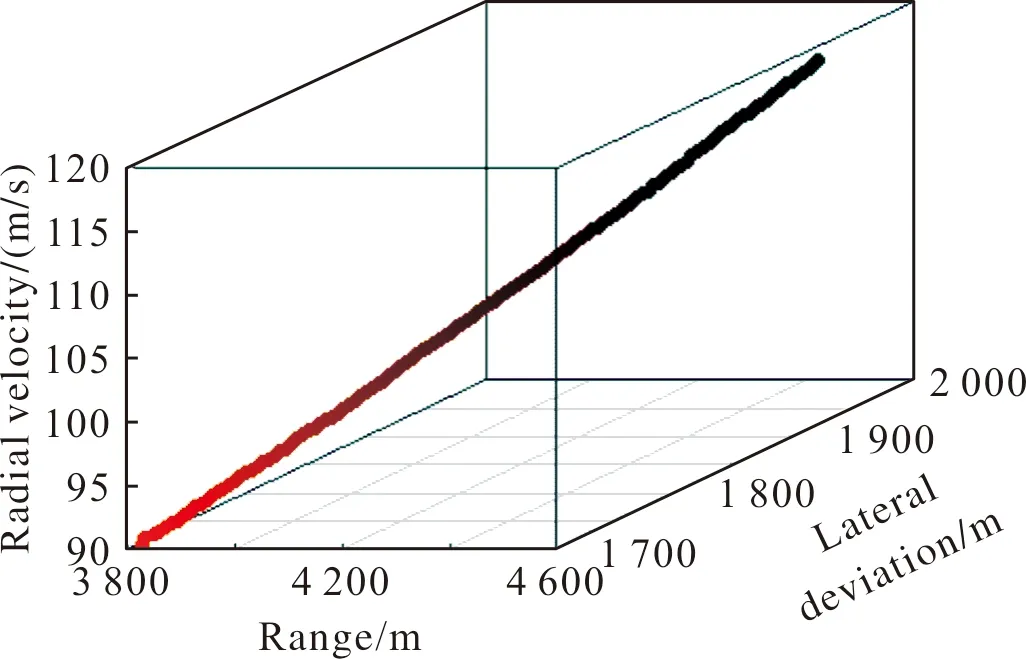
圖6 刪除離群點后徑向速度與射程、橫偏的三維關系曲線Fig.6 Three dimensional relationship curve of radial velocity with range and lateral deviation after deleting outliers
建模前需要考量數據的相關關系,檢驗自變量與因變量關系的方向和強弱。計算自變量射程與因變量徑向速度之間的相關系數并繪制相關系數矩陣,如圖7所示,圓形區域的顏色越靠近藍色且越深,說明相關系數越接近1,兩個特征變量的正相關性越強,顏色越接近紅色且越深,說明兩個變量的相關系數越接近-1,負相關性越強,顏色越接近白色,說明兩個特征變量之間沒有相關性。可以看出射程與徑向速度之間是正向強相關的關系,說明自變量射程有利于提升預測因變量徑向速度的精度。計算自變量橫偏與因變量徑向速度之間的相關系數并繪制相關系數矩陣,如圖8所示,可以看出橫偏與徑向速度也是正向強相關的關系,更加確定所建立的徑向速度與射程一元線性回歸模型、徑向速度與橫偏一元線性回歸模型是合理的,與圖5所表達的特征基本一致。

圖7 射程與徑向速度之間的相關系數矩陣Fig.7 Correlation coefficient matrix between range and radial velocity
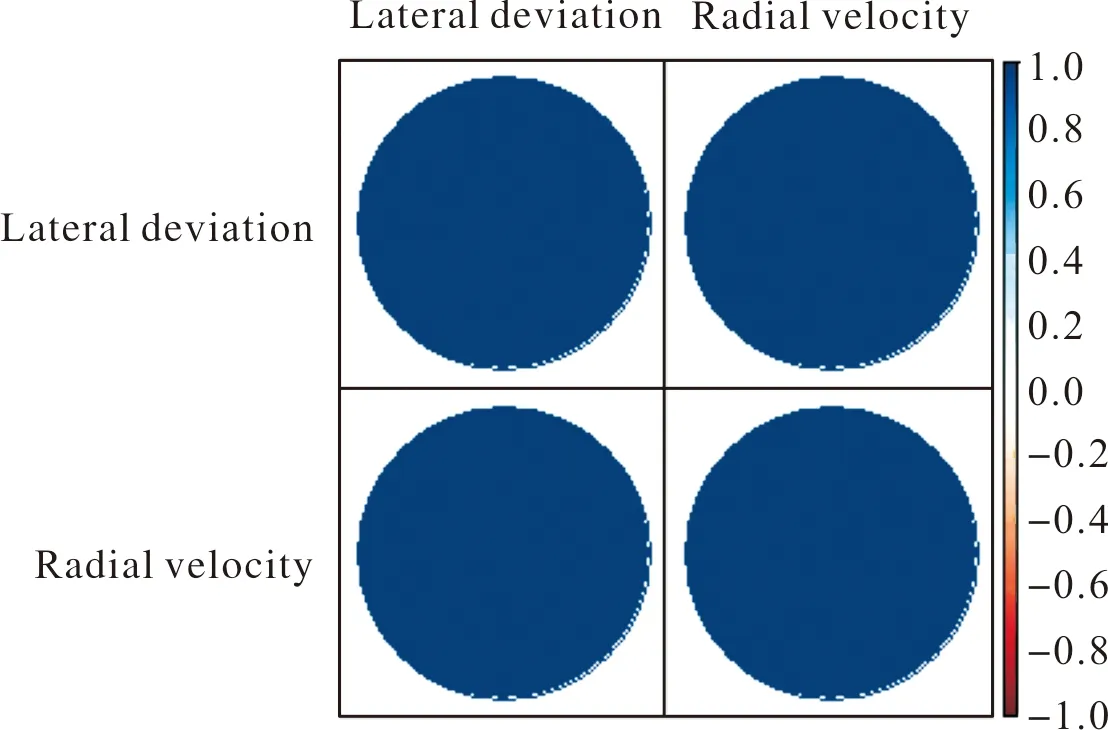
圖8 橫偏與徑向速度之間的相關系數矩陣Fig.8 Correlation coefficient matrix between transverse deflection and radial velocity
由于在10.1~12.0 s之間雷達測試火箭彈徑向速度出現缺失的情況,所以選擇把0.1~10.0 s之間共100個數據作為訓練數據,10.1~12.0 s之間共20個數據作為測試數據。在此之前,先把0.1~5.0 s之間共50個數據作為訓練數據,分別建立徑向速度與射程和橫偏的一元線性回歸模型,以及徑向速度與射程和橫偏的支持向量回歸機模型,然后再把5.1~10.0 s之間的射程和橫偏分別帶入到建立的3個模型中,就得到了3個模型預測出的5.1~10.0 s之間的徑向速度,然后把這3個模型預測值作為特征向量,對應的5.1~10.0 s之間徑向速度實測值作為目標向量,建立遺傳算法優化LSSVM模型。隨后,利用0.1~10.0 s之間的射程、橫偏、徑向速度分別建立徑向速度與射程一元線性回歸模型、徑向速度與橫偏一元線性回歸模型,以及徑向速度與射程和橫偏的支持向量回歸機模型,再把10.1~12.0 s之間的射程、橫偏帶入到建立的3個模型中,就得到了3個模型預測出的10.1~12.0 s之間的徑向速度,最后把這3個預測值帶入到建立好的遺傳算法優化LSSVM模型中,就得到了遺傳算法優化LSSVM預測出的10.1~12.0 s之間的徑向速度。在建立徑向速度與射程的一元線性回歸模型中,模型檢驗結果顯示,回歸方程的顯著性檢驗結果對應的概率p值為2.2×10-16,遠小于臨界統計值0.05,說明所建回歸模型是顯著的,參數Multiple R-squared為0.998 6,參數Adjusted R-squared為0.998 6,均非常接近1,說明所建回歸模型的擬合效果非常好,回歸系數對應的概率p值為2×10-16,遠小于0.001,說明回歸系數是顯著的,表明所建速度-射程回歸模型通過了檢驗;建立徑向速度與橫偏的一元線性回歸模型時,模型檢驗結果顯示,回歸方程的顯著性檢驗結果對應的概率p值為2.2×10-16,遠小于臨界統計值0.05,說明所建回歸方程是顯著的,參數Multiple R-squared為0.999 8,參數Adjusted R-squared為0.999 8,均非常接近1,說明所建回歸方程擬合效果非常好,回歸系數顯著性檢驗結果對應的概率p值為2×10-16,遠小于臨界統計值0.001,說明回歸系數是顯著的,總體可知所建徑向速度-橫偏的一元線性回歸方程通過了檢驗。利用支持向量回歸機解決非線性問題時,最關鍵的部分是引入核函數將樣本數據映射到高維空間使其轉化為高維空間中的線性回歸問題,常用的核函數有線性核函數、徑向基核函數、多項式核函數和sigmoid核函數。不同核函數下,支持向量回歸機預測出的第5.1~10.0 s之間的數據與實測值關系曲線如圖9所示。
圖9 不同核函數支持向量回歸機預測值與實測值關系曲線Fig.9 Relationship curve between predicted value and measured value of support vector regression machine with different kernel functions
從圖9可以看出,利用線性核函數建立的支持向量回歸機預測值與實測值最接近。實際上由于徑向速度與射程、橫偏主要是線性關系,所以支持向量機的核函數選擇線性核函數也是合理的。建立好3個模型后,再把5.1~10.0 s測試數據對應的射程和橫偏分別代入到所建立的3個預測模型中,就可以得到5.1~10.0 s之間徑向速度射程回歸預測值、橫偏回歸預測值和支持向量回歸機預測值。采用同樣的方法,再把0.1~10.0 s之間的數據點作為訓練數據,10.1~12.0 s之間的數據點作為測試數據,就能得到10.1~12.0 s之間的徑向速度對應的射程回歸預測值、橫偏回歸預測值和支持向量回歸機預測值,繪制5.1~12.0 s之間徑向速度實測值與3個模型預測值的關系曲線如圖10所示。
圖10 徑向速度5.1~12.0 s實測值與所有模型預測值關系曲線Fig.10 Relationship curve between measured values of radial velocity from 5.1 s to 12.0 s and predicted values of all models
針對圖10,選擇把5.1~10.0 s之間共50個數據作為訓練數據,10.1~12.0 s之間共20個數據作為測試數據。先把徑向速度5.1~10.0 s之間射程回歸預測值、橫偏回歸預測值和支持向量回歸機預測值作為特征向量,徑向速度5.1~10.0 s之間的實測值作為目標向量,建立遺傳算法優化LSSVM模型,遺傳算法選擇把核函數的參數和正則化參數的尋優范圍設置為0到300,種群規模設置為100,最大迭代次數設置為100,基因突變的概率設置為0.01,把均方根誤差作為適應度函數,最后經過100次迭代,搜尋出的最佳核函數參數和正則化參數分別為299.288 4和299.447 1,均方根誤差隨迭代次數的變化曲線如圖11所示,橫坐標表示迭代次數,縱坐標表示誤差。
然后再把10.1~12.0 s之間徑向速度射程回歸預測值、橫偏回歸預測值以及支持向量回歸機預測值代入到建立好的遺傳算法優化LSSVM模型中,就可以得到遺傳算法優化LSSVM模型預測出的10.1~12.0 s之間的徑向速度。10.1~12.0 s徑向速度實測值與所有模型預測值如表1所示。由于組合模型的權系數是根據預測值與實測值計算出來的,但是在實際問題中并不知道實測值,需要將其預測出來,所以先要計算出權系數。為此,先根據10.1~11.0 s之間所有模型每期預測值與實測值計算出誤差平方,接著建立誤差平方與預測值的一元線性回歸模型,再把11.1~12.0 s之間的4個模型預測值帶入到所建一元線性回歸模型中,就得到了11.1~12.0 s 4個模型預測值對應的誤差平方,如表2所示,然后再根據誤差平方并結合式(8)~式(10)就可以計算出11.1~12.0 s所有預測模型每期預測值對應的權系數,再乘以對應的預測值,相加之后就得到了組合模型預測值,如表3所示。11.1~12.0 s之間實測值與所有模型預測值關系曲線如圖12所示。
表1 10.1~12.0 s之間徑向速度實測值與所有模型預測值Table 1 Measured radial velocity values and predicted values of all models between 10.1 s and 12.0 s m/s

表2 11.1~12.0 s之間預測出的所有模型預測值對應的誤差平方Table 2 Error squares corresponding to the predicted values of all models predicted between 11.1 s and 12.0 s
圖12 徑向速度11.1~12.0 s實測值與所有模型預測值關系曲線Fig.12 Relationship curve between measured values of radial velocity and predicted values of all models from 11.1 s to 12.0 s

(10)
從圖12可以看出,徑向速度11.1~12.0 s之間組合模型預測值最接近實測值。根據表1計算得到,射程回歸預測值與實測值的平均絕對百分比誤差為0.725%,橫偏回歸預測值與實測值的平均絕對百分比誤差為0.448%,支持向量回歸機預測值與實測值的平均絕對百分比誤差為0.509%,遺傳算法優化LSSVM預測值與實測值的平均絕對百分比誤差為0.799%,組合模型預測值與實測值的平均絕對百分比誤差為0.065%,小于1‰,組合模型預測值與實測值的絕對誤差與實測值乘以1‰的關系曲線如圖13所示。
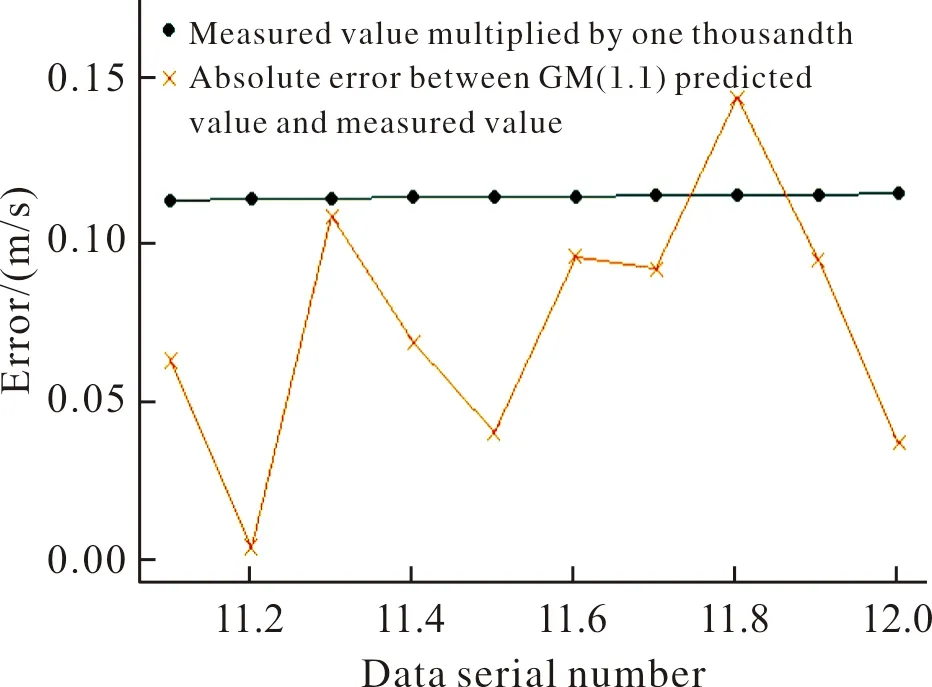
圖13 絕對誤差與實測值乘以1‰誤差標準的關系曲線Fig.13 Relation curve between absolute error and measured value multiplied by 1‰ error standard
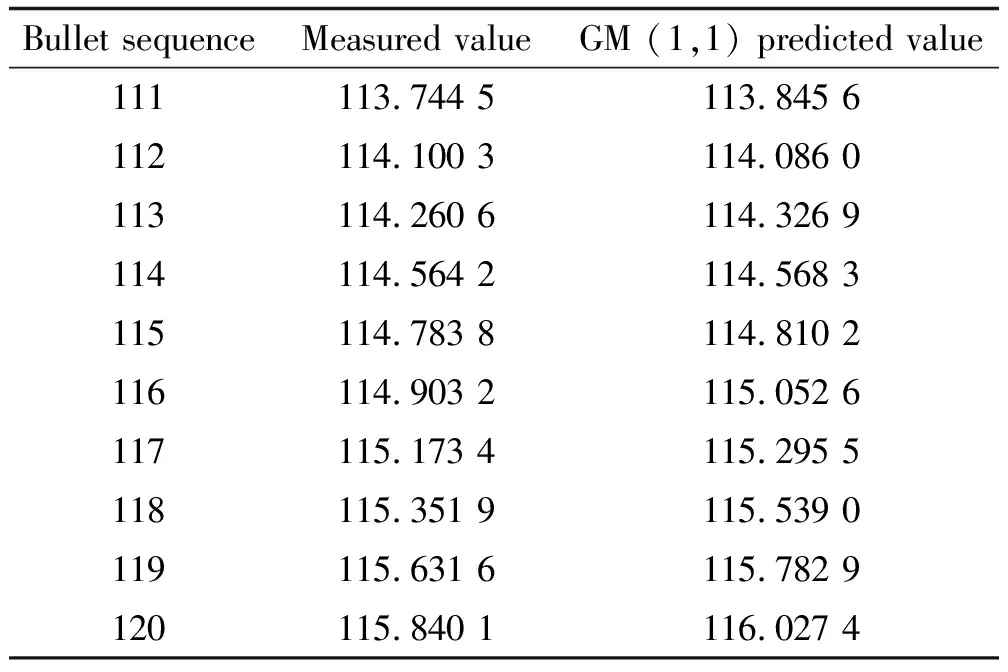
表4 實測值與GM (1,1)模型預測值Table 4 Measured values and GM (1,1) model predicted values m/s
總體而言,雖然GM(1,1)模型預測精度很高,整體的預測誤差小于1‰,而且單項預測誤差大多數也小于誤差標準,但無法與組合模型相比,組合模型的預測精度更有優勢,充分證明所采用方法在預測火箭彈主動段徑向速度的優越性[11]。實際上,火箭彈在主動段的徑向速度容易受到天氣、風速等參試客體的影響,使得徑向速度會出現隨機變化,此時GM(1,1)模型的預測能力就會稍顯不足,反而所采用的組合模型無論什么情況下都能夠同時涵蓋徑向速度中的線性特征和非線性特征。當徑向速度受到外界參試客體的影響時,只要保證具有大量的樣本數據,組合模型就具有更強大的泛化能力,使得預測精度能夠得到充分保證。
6 結論
針對火箭彈徑向速度容易出現缺失的情況,選擇把坐標作為特征向量,徑向速度作為目標向量,進行建模預測,主要得出以下結論:
1)把彈道測量雷達的數據與連續波雷達的數據進行融合,把線性回歸模型、支持向量回歸機模型和遺傳算法優化LSSVM模型進行聯合組合使用,能夠充分挖掘出徑向速度中的線性特征和非線性特征。實驗結果表明,相比所有模型,建立在組合方法上的多模型聯合預測值,不論是整體的預測精度還是單項預測精度,都達到了連續波雷達測試火箭彈徑向速度的精度要求。
2)所采用的方法有效解決了當徑向速度大范圍缺失,同時可用樣本數據又很少,利用時序模型預測精度不高的問題,采用所提方法可以較為準確預測出缺失的徑向速度,為較為準確預測火箭彈徑向速度提出了新的研究方向。
3)靶場試驗中還有很多其他試驗科目比如利用連續波雷達測試著靶速度,利用初速雷達測試彈丸初速等也出現需要對數據進行重構的問題,利用所提方法可以為其他試驗科目提供借鑒。此外,當樣本數據足夠多時可以考慮采用BP神經網絡進行預測,因為神經網絡在大量樣本數據下才能訓練充分,預測精度和泛化能力都比一般模型強很多。
4)文中選擇利用預測值與誤差平方建立一元線性回歸模型,預測出剩余預測值對應的誤差平方,這是因為徑向速度存在明顯的單調趨勢,如果換成其他數據存在很強的非單調趨勢,可以考慮建立多項式回歸模型或者非線性映射模型進行預測。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19