基于一種貝葉斯優化框架的高空螺旋槳氣動優化設計
2023-05-09 08:42:52口啟慧王海峰劉坤澎職鑫鑫
空氣動力學學報 2023年4期
口啟慧,王海峰,劉坤澎,職鑫鑫
(西北工業大學 航空學院,西安 710072)
0 引 言
高空長航時飛行平臺通常指運行在平流層、能長時間工作的飛行器,如平流層飛艇、高空太陽能無人機等。高空長航時飛行平臺的特點使其在通信、對地觀測等領域有著廣泛的應用前景。由電機驅動的螺旋槳推進系統是高空長航時飛行平臺的主要動力[1],其中螺旋槳的推進效率對整個推進系統的效率影響重大,進而影響飛行平臺的續航能力。高空空氣密度和黏度與地面值差異較大,且通常要求螺旋槳槳尖馬赫數小于1以避免跨聲速帶來的激波問題。因此高空螺旋槳的槳尖雷諾數通常低于1 × 106,其氣動問題是一個低雷諾數問題。在飛行平臺功率和槳葉直徑的限制下,獲得高效的高空螺旋槳氣動優化方案是需要解決的關鍵設計問題。
針對以上問題,各國學者對高空螺旋槳氣動優化設計進行了研究。Zhang等用不同優化方法設計低雷諾數翼型[2]。Morgado等使用JBLADE軟件進行高空螺旋槳設計優化[3]。Mourousias等對高空螺旋槳進行基于葉素動量理論和Kriging代理的多點多目標優化[4]。García-Gutiérrez 等發展了一種基于非侵入式多項式混沌展開的螺旋槳設計算法,以平流層飛艇螺旋槳為例進行驗證[5-6]。Ma等耦合直接優化算法EXTREM和XFOIL,為低速低雷諾數翼型的多點設計問題提供有效解決方案[7]。Jiao等提出平流層飛艇螺旋槳的多目標優化和驗證方法[8]。Duan、Liu、Park等分別基于葉素動量理論和渦流理論提出高空螺旋槳設計優化方法,對設計結果進行計算和試驗驗證[9-11]。從文獻中可以看出,目前高空螺旋槳的優化設計大多都基于葉素/渦流理論。這種計算方法的優點是有較快的氣動性能計算速度,但其計算精度較低、尋找理論最優解較為困難。CFD數值模擬雖然具有較高的計算精度,但優化設計中使用其獲得氣動性能造成的時間成本難以接受。
貝葉斯優化(Bayesian optimization, BO)是一種數據驅動進化優化算法,具有很強的自適應和自學習特征[12]。該算法以可變精度的高斯過程模型代替獲取耗時的真實目標函數,通過歷史數據和采樣函數,進行樣本點更新,逼近局部或全局最優解,并保證所產生的樣本點精確收斂于優化問題的真實最優解。對于復雜多維問題,其代替模型不必在整個設計空間內具有高的近似精度,而只需在關鍵區域,特別是最優解附近,具有高的近似精度。貝葉斯優化已逐漸被應用于氣動優化設計領域[13-16]。
本文提出了一種基于貝葉斯優化框架的高空螺旋槳氣動優化設計方法,通過試驗驗證了框架中使用的數值模擬方法的準確性,并使用該方法對某高空太陽能無人機螺旋槳進行優化設計。
1 螺旋槳參數化方法
1.1 低雷諾數翼型
翼型是螺旋槳設計的基礎。傳統翼型在高空、低雷諾數環境下,隨迎角增加,升力系數增加緩慢,阻力系數增加迅速,翼型升阻特性顯著下降。本文暫不考慮翼型的優化設計過程,直接使用課題組研發的PLRY系列翼型(共6個)。圖1給出了其中部分翼型典型徑向剖面的幾何形狀。
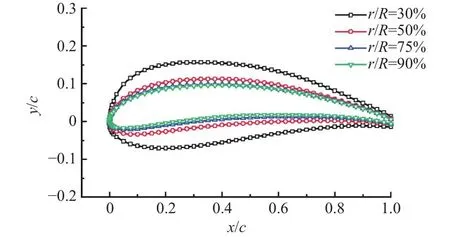
圖1 部分翼型典型徑向剖面示意圖Fig.1 Airfoil radial profiles
高空螺旋槳從根部到尖部涵蓋低速、亞聲速或高亞聲速范疇,采用系列翼型可以綜合兼顧高升力和高升阻比,具有幾何兼容和氣動兼容等特點。該系列翼型相對厚度由槳根向槳尖逐漸減小,根部厚、尖部薄的特點也為提高螺旋槳結構剛度提供了條件。
1.2 螺旋槳幾何參數化
螺旋槳由外形完全相同的槳葉組成,因此螺旋槳的設計需要先進行槳葉幾何外形設計,再以此為基礎計算螺旋槳氣動性能。目前槳葉的設計不是直接進行幾何坐標設計,而是將槳葉劃分為多個剖面,選定一個或一組翼型作為各剖面基本翼型,保持槳葉各剖面翼型不變,通過設計各剖面翼型的實際弦長和扭轉角確定槳葉的幾何外形,然后通過螺旋槳氣動性能(推力、效率、功率等)判定設計方案的優劣。
基于槳葉弦長和扭角分布特點,本文使用二次函數參數化方法來描述槳葉弦長和扭轉角分布,保證了槳葉氣動外形沿展向光滑連續。同時,與直接使用弦長和扭轉角作為設計變量相比,該方法減少了變量個數,降低了設計空間維數,設計變量個數不會隨剖面數量而變化,提高了螺旋槳優化收斂速度。
高空螺旋的每片槳葉從根部到尖部可以分為內段、中段和外段,其中中段和外段貢獻了其整體推力的80%~90%[17]。本文定義螺旋槳相對半徑r/R= 0.2(R為螺旋槳半徑)所在的剖面為內段和中段分界面。根據PLRY系列翼型特點,其有效氣動外形被劃分為12個截面。從根部開始,1~3剖面翼型相同,4~6剖面使用3個不同翼型,7~9剖面翼型相同,10~12剖面翼型相同。
1.2.1 弦長參數化
弦長參數化方法如式(1)所示,弦長最大點將該函數分為兩個二次函數。該函數在分段點(弦長最大位置)處連續可導,保證了弦長在最大位置處的光滑。
其中:x為剖面位置;xmax為最大弦長所在剖面位置;xtip為槳尖位置(等于螺旋槳半徑);c為剖面弦長;cmax為最大剖面弦長;croot為根部弦長;ctip為槳尖弦長。上述變量單位均為mm。槳葉弦長的參數化變量共 5 個:croot、xmax、cmax、xtip、ctip。
1.2.2 扭轉角參數化
扭轉角參數化方法如式(2):
其中:x為剖面位置,單位為mm;xp為分布函數極值點位置,單位為 mm;β為剖面扭轉角,單位為 (°);βroot為根部扭轉角,單位為 (°);βtip為槳尖扭轉角,單位為 (°)。槳葉扭轉角的參數化變量共 3 個:βroot、βtip、xp。
通過以上選取的系列翼型及螺旋槳幾何參數,即可確定各剖面弦長和扭轉角。帶弦長和扭轉角的各翼型前后緣坐標可生成三條三次樣條曲線(前緣一條,后緣兩條),樣條曲線和各剖面翼型共同構成槳葉氣動外形輪廓。以槳葉輪廓為基礎,使用光滑曲面可生成其氣動外形。
2 數值模擬
2.1 模擬方法
采用非結構化網格進行數值模擬,采用網格自動化技術完成適應槳葉外形變化的流場網格和貼體網格劃分,在槳尖和前后緣進行局部網格加密,網格數量大約1 200萬,其中內場網格數量大約900萬,外場網格大約300萬。共15層附面層網格,第一層附面層網格高度為0.002 mm(y+<1)。流場尺寸如圖2所示。使用滑移網格方法,其中內場為旋轉域,外場為靜止域。數值模擬采用基于有限體積法(finite volume method, FVM)的CFX完成,湍流模型使用SSTk-ω二方程模型,對流項離散格式為二階迎風。仿真條件如表1所示。數值模擬收斂準則采用均方根(root mean square, RMS)殘差類型,殘差精度為 1 × 10-4。
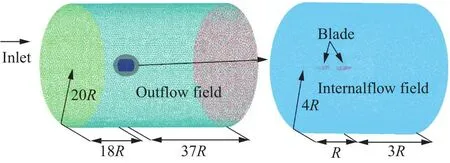
圖2 CFD模擬流場尺寸示意圖Fig.2 Sketch of CFD simulation domain
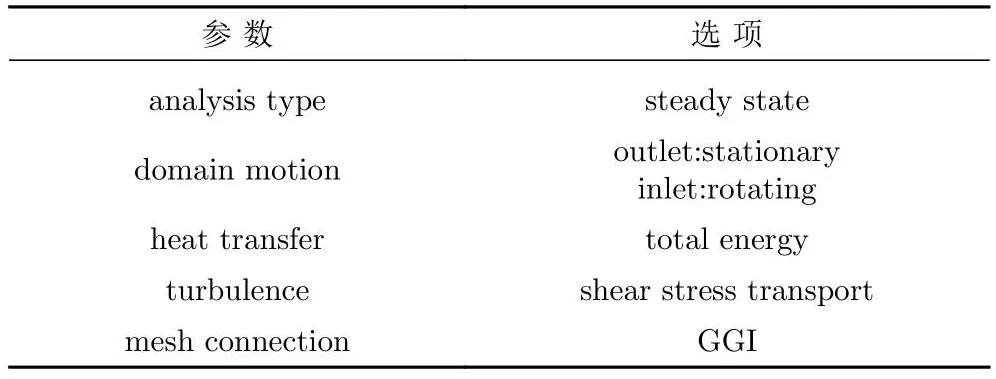
表1 CFD求解器設置Table 1 CFD solver settings
2.2 模擬方法驗證
為驗證數值模擬方法的準確性,使用該方法對某高空螺旋槳的地面氣動性能進行數值模擬,并與試驗測試結果進行對比。模擬條件與試驗的工況參數相同(見表2)。

表2 設計工況Table 2 Design condition
螺旋槳地面靜推力試驗在西北工業大學的試驗臺進行(圖3)。試驗現場環境溫度34.54℃,相對濕度60.2%。試驗考慮了環境對結果的影響,共進行了三次測試。圖4給出了測試數據和仿真數據對比。從圖中可以看出,三次試驗結果基本一致,驗證了測試系統的穩定性。試驗數據與仿真數據變化趨勢一致。相同轉速下,推力平均誤差約2.34%,最大誤差約5.66%;最大推力誤差發生在第一次試驗轉速為175 r/min時,其余兩次試驗在該轉速時的推力誤差分別為1.74%和2.41%。扭矩平均誤差約3.33%,最大誤差約6.79%;最大扭矩誤差發生在第一次試驗轉速為75 r/min時,其余兩次試驗在該轉速時的扭矩誤差分別為2.89%和3.35%。

圖3 地面靜推力測試Fig.3 Ground thrust test
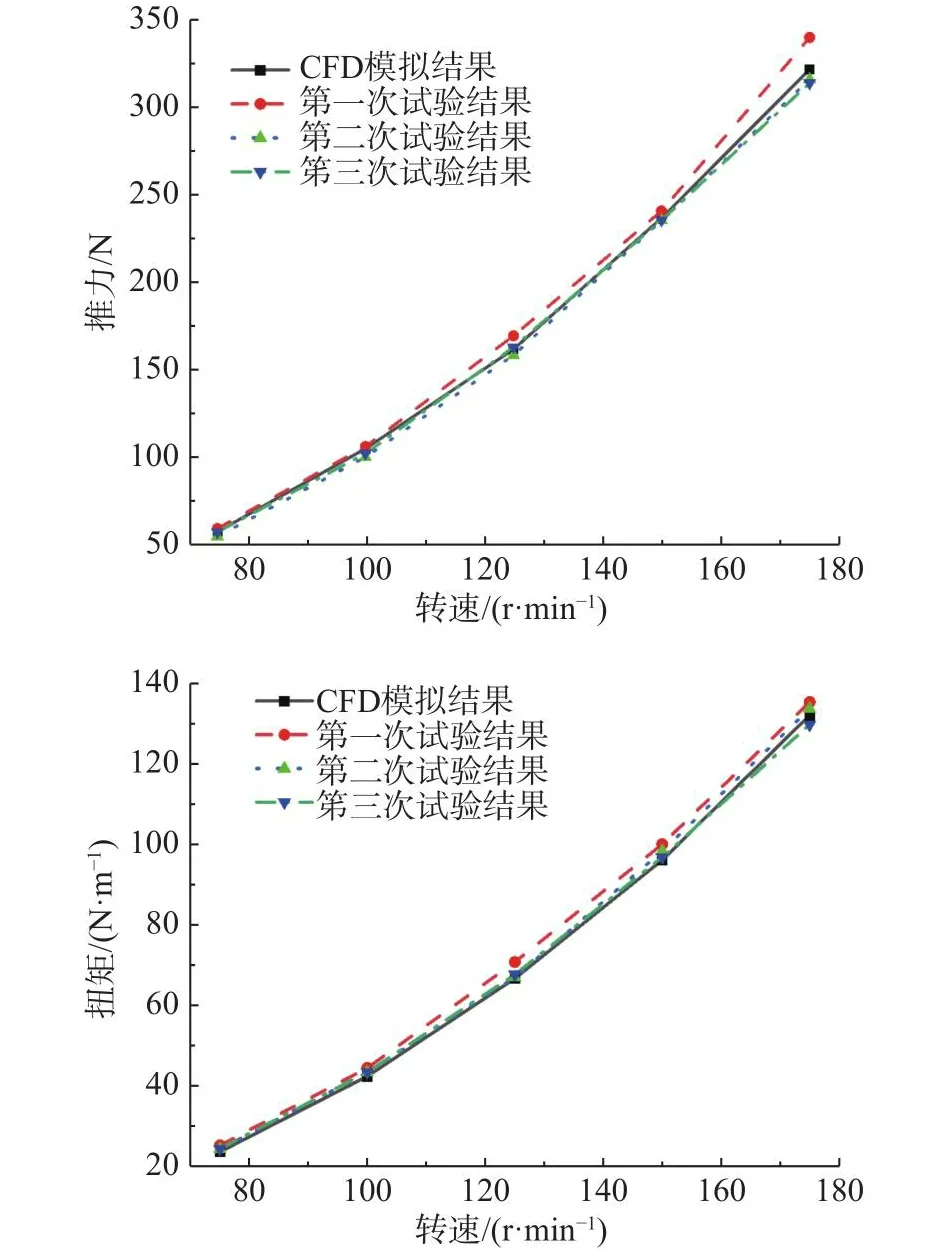
圖4 測試數據和仿真數據對比Fig.4 Comparison of experimental and numerical results
3 貝葉斯優化方法
本文使用的高空螺旋槳貝葉斯優化方法流程如圖5所示。
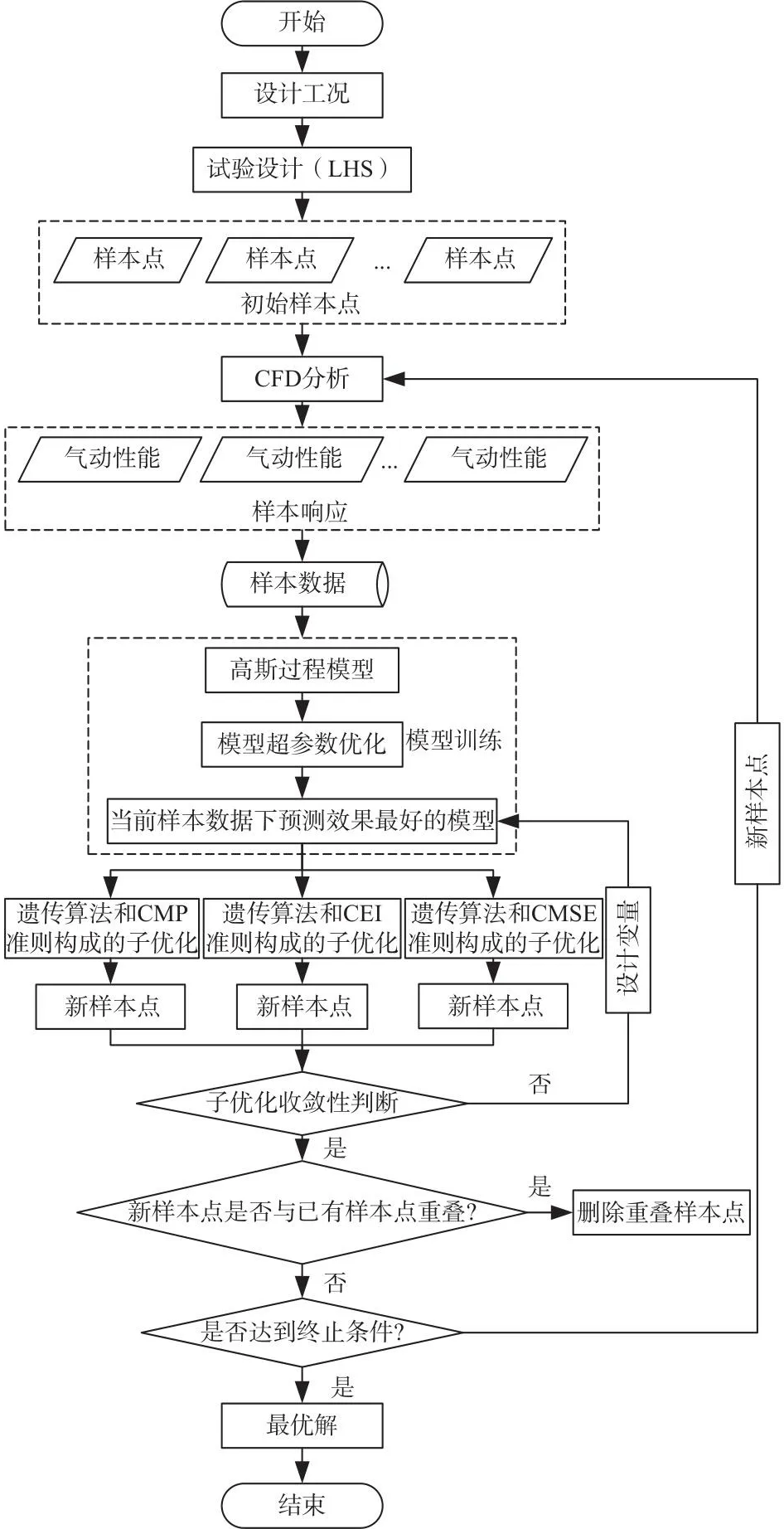
圖5 高空螺旋槳貝葉斯優化流程Fig.5 BO process for high-altitude propellers
圖中初始樣本使用拉丁超立方抽樣,根據實際需求選擇初始樣本數量,通過數值模擬來計算螺旋槳氣動性能。初始樣本通過訓練獲得初代高斯過程模型。CMP為帶約束的目標函數最小值預測準則(constraint minimizing the predicted objectivefunction)[18-19], CEI為 帶 約 束 的 改 善 期 望 準 則(constraint expected improvement)[18,20],CMSE 為帶約束的均方差準則(constraint mean squared error)[18-19]。遺傳算法和以上三種準則共同構成貝葉斯優化的并行加點子優化。子優化可以獲得不同加點準則在當前模型下的最優解及對應設計變量,通過數值模擬得到氣動性能,并將新的樣本點加入樣本數據,更新樣本數據,訓練模型。三種加點準則可以在一次優化中產生三個新樣本點,從而提高優化收斂速度。產生于當前模型最優解附近的新樣本點,提高了更新后的模型在局部和全局最優解附近的近似精度,這樣可以將樣本點添加在模型最需要的地方,降低優化時間成本,提高優化效率。這是貝葉斯優化和固定代理模型優化的主要區別,也是貝葉斯優化的優化機制。
貝葉斯優化沒有嚴格的收斂條件,國內外關于其優化終止條件定義的文獻較少,也沒有統一的標準。本文使用兩種終止條件共同判定[13]:
(1)根據樣本點距離及其對應目標函數值的差別來定義。
式中,下標“new”代表新加入的樣本點,下標“best”代表現有樣本中的最優點。當新加入樣本點與當前最優樣本點之間的距離以及函數值之差相對值小于設定的閥值ε時,優化即可終止。
在設計空間內,高空螺旋槳的優化是一個多峰多谷問題,對于相同的目標函數值,可能有不同解。因此在上述終止條件中,增加了樣本點距離的比較,以確保目標函數變化達到要求的閾值時,對應的樣本點在同一個峰內,即,只有新樣本點與已知最優樣本點之間的距離和目標函數變化都很小時才認為優化收斂。
(2)預設的數值模擬最大次數。由于代理模型的使用,單獨使用終止條件(1)可能存在一個問題—當優化獲得的新樣本點恰好在初始最優樣本點附近時(即初始最優樣本點恰好在初始模型某個局部或全局最優解附近時),可能由于達到收斂閾值而使優化提前終止,但此時模型精度不高,獲得的結果并不是最優。為了避免這種可能存在的偶然情況,本文同時使用了終止條件(2)。兩種終止條件共同使用,避免了上述偶然情況的發生,使優化能在可接受時長的約束范圍內獲得較好的結果。
4 基于貝葉斯優化的氣動外形設計
本文使用貝葉斯優化方法,對通過葉素/渦流理論優化設計獲得的某高空太陽能無人機螺旋槳進行氣動優化與驗證。設計工況如表3所示。
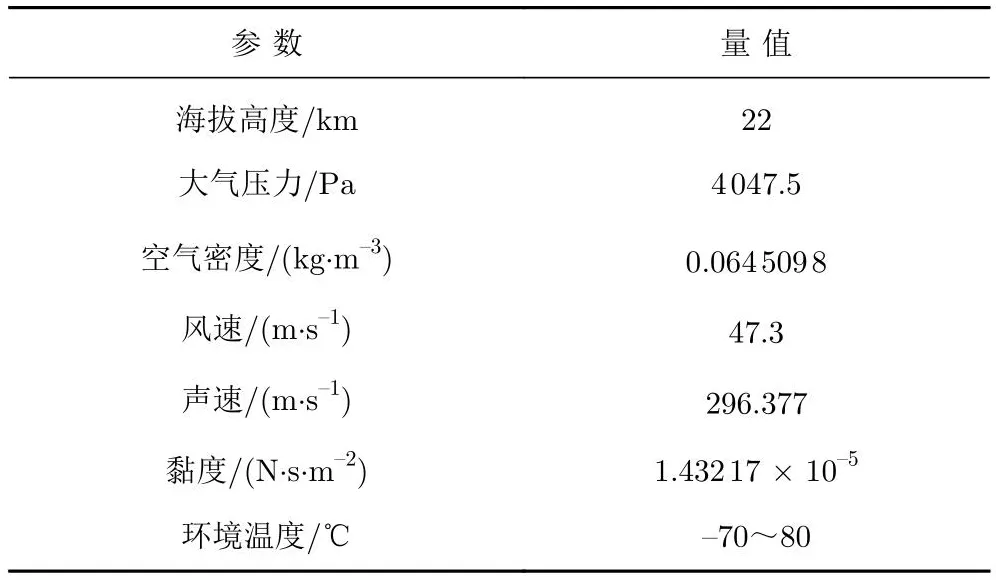
表3 設計工況Table 3 Design condition
4.1 優化模型
根據螺旋槳參數化方法,確定其幾何外形共需8個變量。在確定典型任務工況情況下,計算螺旋槳氣動性能還需轉速(n)。因此拉丁超立方抽樣的變量數為9。當槳徑固定時,實際設計變量數為8。本文取樣本數量為40。各變量取值范圍見表4。

表4 設計變量范圍Table 4 Design variable value range
高空螺旋槳氣動性能主要有推力(T)、扭矩(M)、功率(P)、效率(η)。其優化問題是在輸入功率限制下,使螺旋槳產生的推力最大。其優化數學模型為:
各子優化均使用精英保留遺傳算法(elitist reservation genetic algorithm, EGA),種群數量為50,最大代數為1 000。
本文使用的優化終止條件中,新加入樣本點目標函數和當前樣本最優點目標函數之差的相對值的閾值ε為1 × 10-6。調用精確數值模擬次數最大為300。
4.2 優化結果對比
圖6給出了優化目標函數迭代收斂曲線。圖中橫坐標表示調用數值模擬次數(含初始樣本數值模擬時的調用次數),即樣本點數量;縱坐標表示用當前樣本點訓練成的模型優化得到的目標函數值。從圖中可以看出,樣本點數量約為130,即優化調用90次數值模擬時,優化開始趨于收斂,且在后續再進行的110次子優化中,目標函數不再提升。
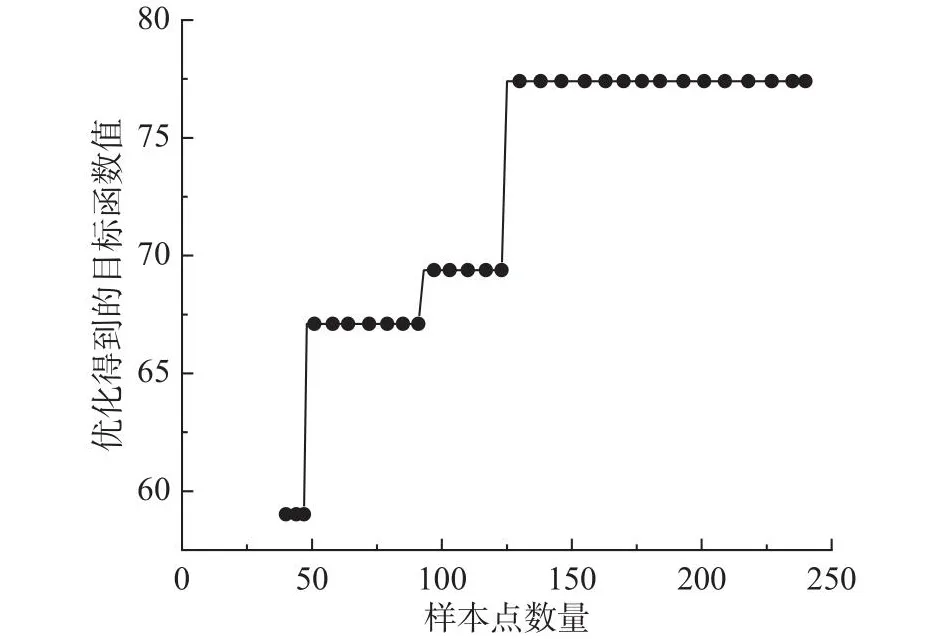
圖6 優化收斂曲線Fig.6 Optimization convergence curve
優化前后設計變量取值對比如表5,氣動外形對比如圖7。從優化前后設計變量和氣動外形的變化可以看出,優化后的槳葉有更大弦長,最大弦長位置更靠近根部,螺旋槳的面積由0.266 m2增加到0.294 m2;優化后的槳葉從根部到尖部的扭轉角變化更大。

表5 優化前后設計變量對比Table 5 Comparison of design variables before and after optimization
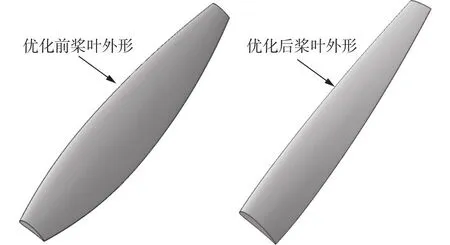
圖7 優化前后外形對比Fig.7 Shape comparison before and after optimization
圖8給出了優化前后螺旋槳在表3所示高度和速度下的氣動性能對比。圖中橫坐標為前進比(λ),由于設計中來流速度和槳徑為常量,因此前進比只與轉速有關。從圖中可以看出,相同前進比下,優化后的螺旋槳在設計點附近具有更高的推力和效率。表6給出了5 kW功率點的性能對比。優化后的螺旋槳在功率點的性能顯著提高,推力提高9.24%,效率提高8.13%。優化后,在5 kW設計點轉速降低約100 r/min,因此槳尖馬赫數減小;但由于槳尖剖面弦長增大,所以槳尖雷諾數增大。
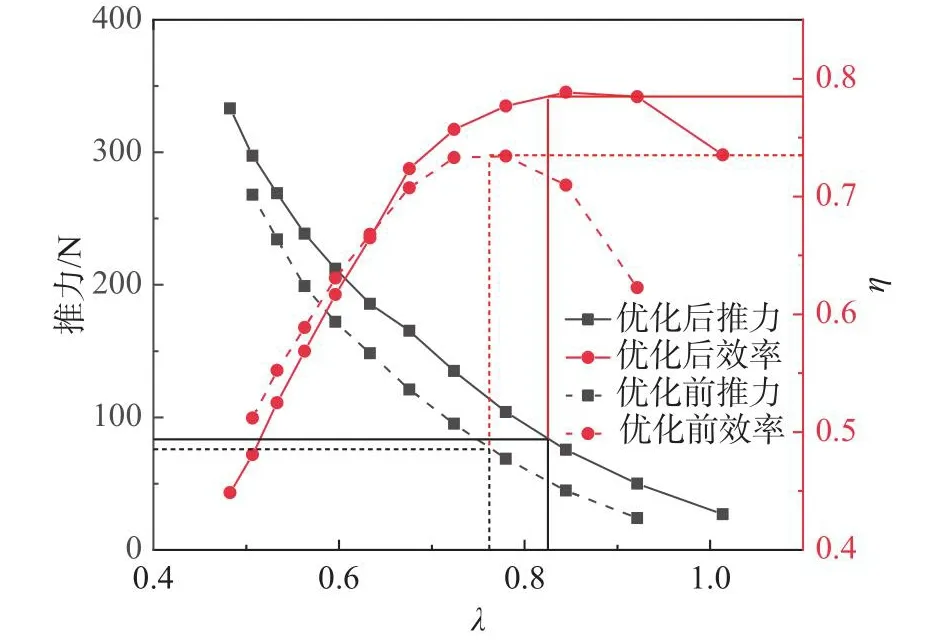
圖8 螺旋槳性能對比Fig.8 Comparison of aerodynamic performance
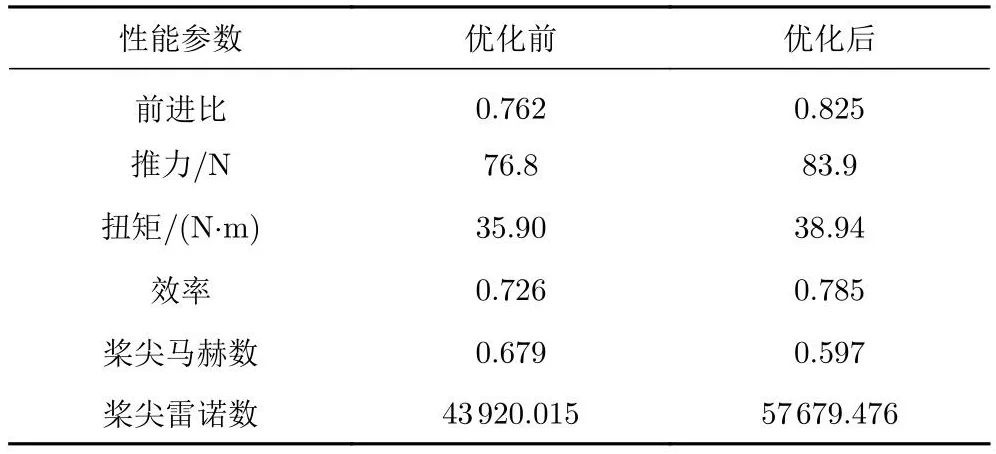
表6 5 kW設計點氣動性能對比Table 6 Comparison of aerodynamic performance at 5 kW
在5 kW設計點,優化前后槳葉壓力分布如圖9所示,流線如圖10所示。優化前后槳葉負壓均出現在前緣靠近槳尖的位置,壓力分布連續性較好,無突變情況,這與螺旋槳旋轉時實際壓力分布情況相同。優化前槳葉尖部流線不完整,表明在該工況下,氣流在槳葉尖部后緣上表面出現提前分離,而優化后的槳葉流線分布較好。
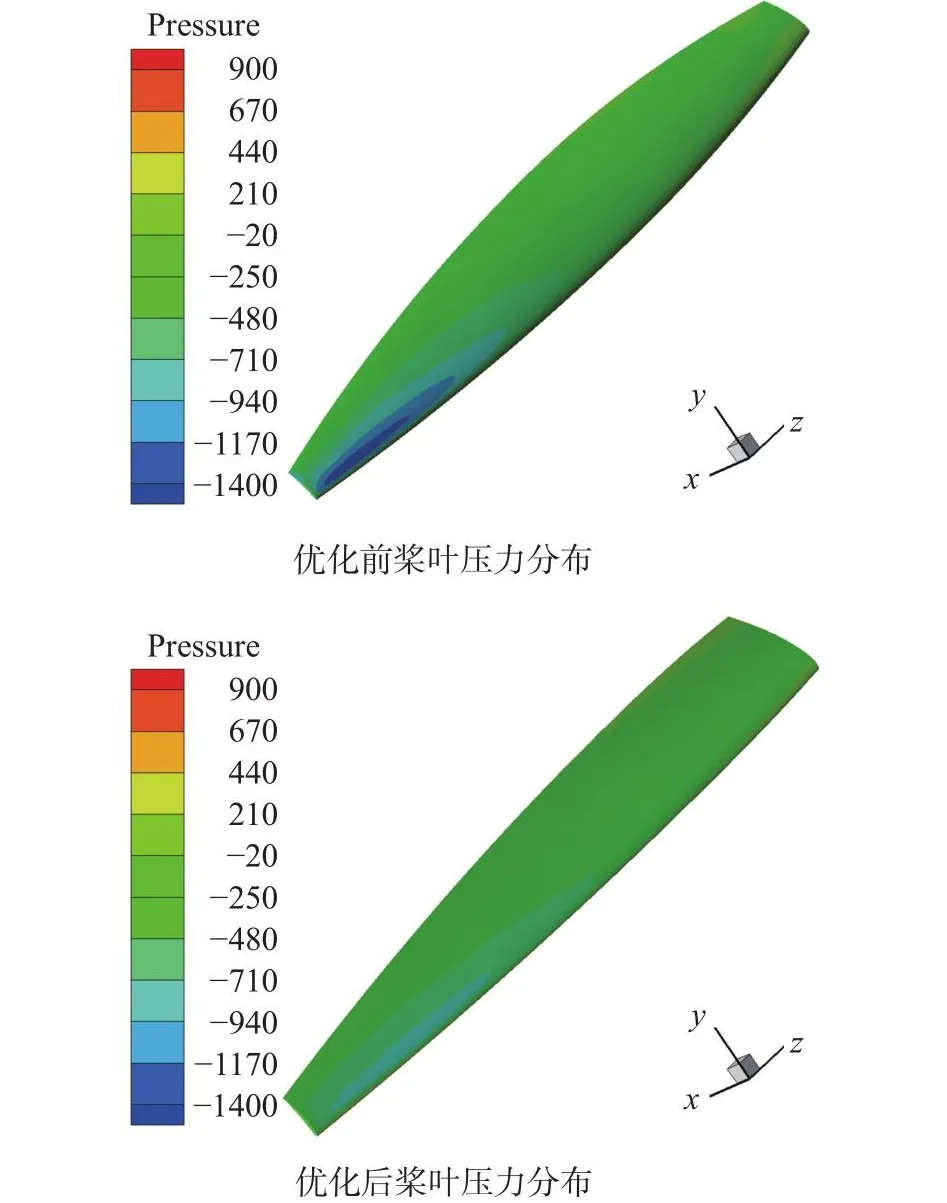
圖9 5 kW功率時壓力云圖對比Fig.9 Comparison of pressure contours at 5 kW power

圖10 5 kW功率時流線圖對比Fig.10 Comparison of streamlines at 5 kW power
5 結 論
本文從優化耗時和數據精度影響兩方面考慮,提出了一種基于貝葉斯優化框架的高空螺旋槳氣動外形優化設計方法,并完成高空螺旋槳氣動優化設計。研究結果表明:
1)基于貝葉斯優化框架的高空螺旋槳氣動外形優化設計方法具有更好的全局收斂性,能在可接受時長內獲得更高效的氣動外形設計方案。
2)該方法中,加點準則和遺傳算法構成的子優化產生新樣本點是其優化機制,而并行加點策略則可以有效提高優化的全局收斂性和收斂速度。
3)該方法可以對螺旋槳的氣動設計及應用提供工程指導,同時也可以為機翼的設計提供一定的參考和技術支持。
4)該方法中子優化均為單目標優化,每次優化中新樣本點的個數取決于加點準則的個數,這在提高優化效率方面仍然比較有限。若考慮將子優化轉換為多目標優化,有望大幅降低優化迭代次數、提高優化效率、增強應用便捷性。這將作為后續研究的重要內容。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
