基于模糊調參規則和IDOB 的光電平臺復合控制方法
2023-04-29 03:43:26何錦廷丁祝順張明闖
導航與控制 2023年6期
何錦廷, 谷 奇, 丁祝順, 孫 寅, 張明闖
(1. 北京航天控制儀器研究所, 北京 100039;2. 北景國測(上海)量子科技有限公司, 上海 201306)
0 引言
航空光電平臺由機械結構和伺服控制系統組成, 為光電吊艙在慣性坐標系下提供高精度的視軸穩定功能[1]。 當載體平臺高速、 大機動運動時,光電平臺因受到外部機體的隨機振動與氣流顫振等影響, 造成光學載荷視軸抖動、 成像模糊失真等現象[2], 對目標探測識別距離、 目標定位精度等功能帶來不利影響, 嚴重時甚至導致光軸偏離目標[3], 跟蹤功能失效。 因此, 在這種多變復雜的動態環境下, 有效補償擾動對提升光電平臺性能具有重要意義。
對于光電平臺而言, 控制系統的外部擾動具有時變性, 并且不平衡擾動力矩、 線束干擾力矩、耦合力矩等不易精確建模, 傳統PID 也因參數固定而不能適應系統的變化, 因此需要擾動觀測器或其他算法加以優化。 陳曉剛等[4]為了補償摩擦、 線纜彈性力矩以及風阻力矩等干擾, 建立了Stribeck摩擦模型, 并進行了擾動觀測器反饋補償, 所提算法比傳統PID 具有更小的位置跟蹤誤差。 DENG等[5-6]設計了雙補償擾動觀測器對干擾進行估計,與標準DOBC 方法相比, 雙補償擾動觀測器具有疊加的干擾抑制功能, 在不改變穩定裕度和跟蹤能力的情況下, 可以抑制更多的干擾; TONG 等[7]、LU 等[8]提出了有參數自整定能力的模糊控制算法,其抗干擾能力和跟蹤能力明顯優于傳統PID 控制器。 但在工程實驗中, 模糊PID 控制因受系統機械諧振的限制, 僅在一定范圍內提高了系統帶寬,對擾動的補償具有局限性。
在上述研究的基礎上, 本文建立了光電平臺動力學模型。 考慮軸端摩擦力對穩定平臺動力學響應的影響, 構建了LuGre 摩擦模型和控制系統回路模型, 提出了模糊算法與改進干擾觀測器(Improved Disturbance Observer, IDOB) 組合的控制方法。 結合航空光電平臺的實際工況, 對本文所提的基于復合控制系統的穩定性進行仿真分析和實驗驗證。
1 光電平臺建模
1.1 兩軸平臺模型
(1)平臺動力學建模
航空光電平臺屬于伺服控制系統, 以兩軸兩框架平臺系統為例, 其結構示意圖如圖1 所示。
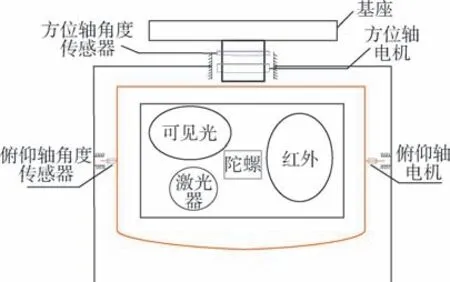
圖1 兩軸光電平臺結構示意圖Fig.1 Structure diagram of two-axis photoelectric platform
光電平臺基座、 方位框架和俯仰框架坐標系示意圖如圖2 所示。 其中, 光電平臺基座坐標系為R系, 方位框架坐標系為A系, 俯仰框架坐標系為P系。 由于光電平臺基座與載體固連, 因此光電平臺基座坐標系與載體坐標系的方向一致。

圖2 光電平臺基座、 方位框架和俯仰框架坐標系示意圖Fig.2 Schematic diagram of coordinate systems for photoelectric platform base, azimuth frame and pitch frame
假定框架結構為剛體, 且沿俯仰軸存在非對稱分布質量, 根據歐拉運動學方程, 可建立俯仰框架的動力學方程為[9]
式(1)中,HP和JP為俯仰框架的慣性角動量和慣性張量。 由式(1)可得, 俯仰軸直流力矩電機繞定軸轉動的動力學力矩TPx為
式(2) 中,Ixx為俯仰框架繞x軸的轉動慣量,ωP=[ωPxωPyωPz]為俯仰框架在慣性空間的角速度,TPe為動態非平衡慣量產生的干擾力矩,TPd為俯仰框架與方位框架相對運動產生的耦合力矩。當俯仰框架保持某個角度θp時, 同理, 方位軸直流力矩電機繞定軸轉動的慣性角動量HA和動力學力矩TAz可表示為
式(3)中,HA和JA為方位框架的慣性角動量和慣性張量,為俯仰框架到方位框架的旋轉變換矩陣,IAz為方位框架繞z軸的轉動慣量,ωA=[ωAxωAyωAz]為方位框架在慣性空間的角速度,TAe為動態非平衡慣量產生的干擾力矩,TAd為兩框架相對運動產生的耦合力矩。
(2)摩擦力模型
摩擦力模型選擇廣泛使用的LuGre 摩擦模型[10], 表達式如下
式(4)中,F為摩擦力矩估算值,v為接觸面的相對速度,z為鬃毛的平均形變,σ0為鬃毛剛度,σ1為微觀阻尼系數,σ2為黏性摩擦因數,Fs為最大靜摩擦轉矩,Fc為庫倫摩擦轉矩,vs為Stribeck速度, 指數α取0.5。
1.2 控制系統回路
由于光電平臺俯仰框架和方位框架的驅動方式、 控制方法及擾動作用原理類似, 因此本文選擇俯仰框架作為研究對象。 俯仰框架伺服系統采用兩環控制, 如圖3 所示, 內環為電流環, 外環為速率環。 內環決定了系統的響應速度和電機的抗干擾能力, 外環主要降低外界擾動對光電平臺伺服系統穩定性的影響。 本文將電流環已調節至最佳帶寬并保持不變, 重點對速率環進行分析研究。
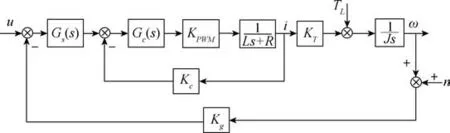
圖3 控制系統回路框圖Fig.3 Block diagram of control system loop
圖3 中,u和ω為系統的輸入和輸出,Gs(s)為速率環的控制器,Gc(s) 為電流環的控制器,KPWM為PWM 的增益系數,為電機簡化模型,i為電機電樞電流,Kc為電流檢測反饋系數,KT為力矩系數,TL為控制系統干擾,J為折算到電機軸上的轉動慣量,Kg為陀螺增益,n為測量噪聲。
2 控制器設計
光電平臺伺服系統控制器分為兩部分設計:1)由于伺服控制系統中存在質心分布不均勻、 俯仰角變化及電機磁場氣隙隨時間變化等影響因素,使得光電平臺系統的轉動慣量和電機力矩系數等參數是時變的, 為此采用了模糊控制, 以提高控制系統的魯棒性; 2)針對軸端摩擦和一些難以精確建模的未知干擾, 通過干擾觀測器(Disturbance Observer, DOB)觀測相應的狀態量并進行實時補償。但由于傳統DOB 包含微分環節, 高頻測量噪聲難以消除, 影響了光電平臺視軸穩定精度, 因而提出IDOB, 將所觀測的擾動通過等效控制量的方式進行反饋補償。
2.1 模糊PID 控制器設計
模糊PID 控制采用模糊規則和模糊集合進行推理判斷, 以偏差e和偏差變化率ec為輸入, 偏差變化率采用一階后向差分法, 通過不斷迭代檢測e和ec, 對PID 參數進行在線修改, 在實際應用中具有一定的自適應性、 容錯性和魯棒性[7]。 光電平臺模糊PID 控制器公式為
式(5) 中, Δkp、 Δki為模糊控制器輸出的比例、 積分系數的實時增量。
根據穩定效果進行多次仿真分析后[7], 確定輸入e、ec的模糊論域均為[ -6, 6], 量化因子為5和0.03; 輸出模糊語言變量Δkp、 Δki的模糊論域均為[0, 6], 量化因子為0.005 和0.25。 將輸入變量e、ec和輸出變量Δkp、 Δki的模糊集均設定為{NB, NM, NS, ZO, PS, PM, PB}; 模糊輸入、輸出的隸屬度函數均為三角分布函數。 模糊規則如表1、 表2 所示。
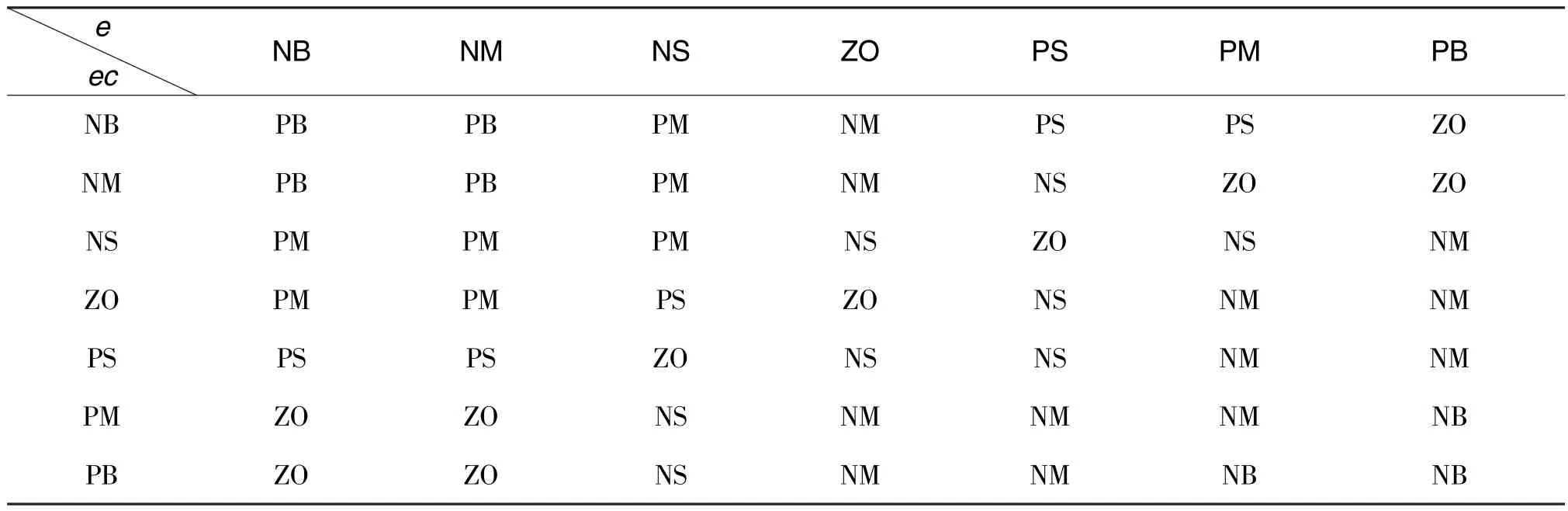
表1 Δkp 的模糊規則Table 1 Fuzzy rules of Δkp
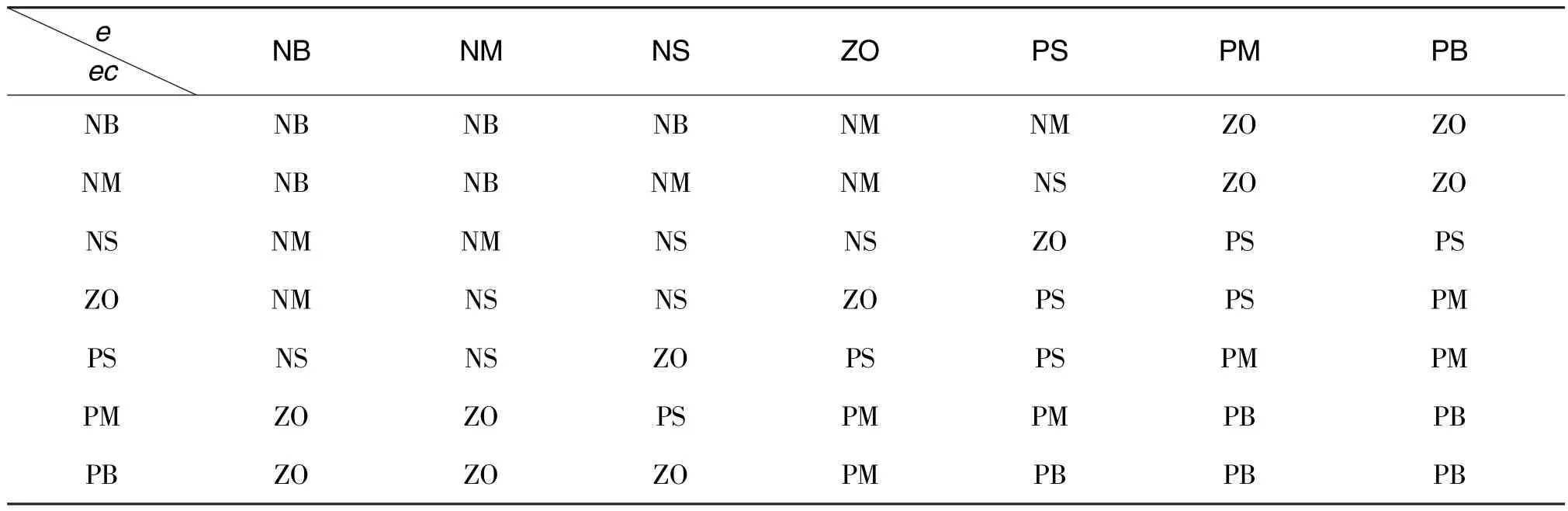
表2 Δki 的模糊規則Table 2 Fuzzy rules of Δki
2.2 改進型觀測器設計
傳統DOB 是通過建立標稱模型代替實際被控對象, 并將觀測的干擾值進行反饋, 與控制器共同輸出帶有抵消擾動的控制量, 從而達到消除干擾的目的。 基于傳統DOB 的結構應用到光電平臺系統中, 其結構框圖如圖4 所示。
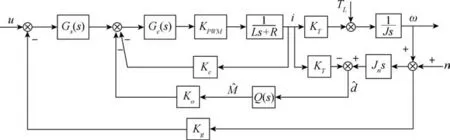
圖4 傳統DOB 系統的結構框圖Fig.4 Structure diagram of traditional DOB system
圖4 中,Jn與轉動慣量J相等,Q(s)為低通濾波器,Ko為傳統DOB 的反饋系數,為對干擾力矩的估計,為傳統DOB 的輸出, 仿真時測量噪聲n是從陀螺手冊中獲取。 由圖4 可知, 伺服系統輸出ω為
式(6)中,G′c(s)為電流環閉環傳遞函數。 傳統DOB 輸出為
由式(6)可知, 當高頻段Q(s) =0 時, 系統對測量噪聲不敏感; 當低頻段時,系統可以補償低頻的擾動。 由于被控對象的相對階次不為0, 其逆含有微分算子, 且微分算子因需要未來時刻的輸入信息在物理上難以實現, 并且會導致系統對高階測量噪聲敏感, 為此對傳統DOB 提出如下改進:
與傳統觀測器不同的是: 在傳統DOB 補償擾動思想的基礎上, 將式(7)的一階微分算子s利用一階低通濾波器構成的回路近似代替, 可得對擾動估計的量
從式(8)中可看出其不含微分環節, 在工程上具有可行性和簡潔性。 基于IDOB 的光電平臺控制結構如圖5 所示。
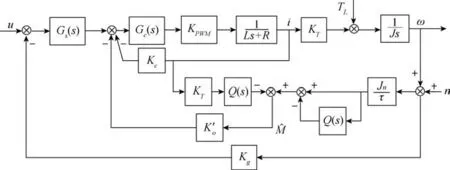
圖5 基于IDOB 的系統控制結構圖Fig.5 System control structure diagram based on IDOB
圖5 中,K′o為改進干擾觀測器(IDOB)的反饋系數,τ為時間常數。
改進后的伺服系統輸出如下
本文所設計的控制器采用了模糊控制與IDOB反饋補償相結合的控制策略, 通過模糊算法在線修改PID 參數的方式形成模糊PI 控制器(模糊PID控制器D 參數為0), 替代了速率環控制器Gs(s),再結合IDOB 估計的擾動值, 形成對外界擾動的控制量。 基于復合控制方法的光電平臺伺服系統總體框圖如圖6 所示。
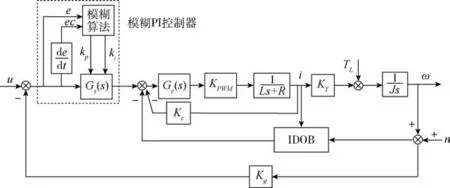
圖6 復合控制系統總體框圖Fig.6 General block diagram of composite control system
3 仿真分析與實驗
3.1 仿真分析
IDOB 的關鍵是設計合適的時間常數τ, 而τ的選擇需要在對干擾的抑制能力和對噪聲的敏感度之間權衡, 時間常數越小, 對低頻干擾的抑制能力越強, 但同時對高頻噪聲也越敏感, 反之則情況相反[11]。 取τ分別為0.001、 0.01、 0.05 和0.1 時, 基于不同時間常數的IDOB, 對干擾的估計效果如圖7(a) 所示, 對干擾的補償效果如圖7(b)所示。 圖7 中的曲線a1、a2、a3、a4分別對應的是τ取0.1、 0.05、 0.01、 0.001。
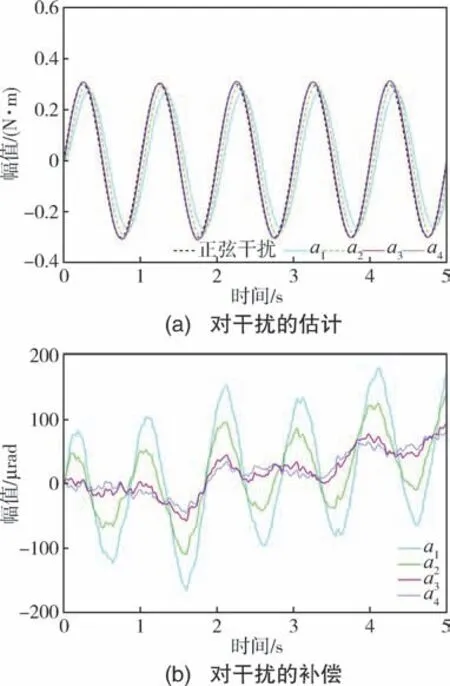
圖7 基于不同時間常數的IDOB 對干擾的觀測及補償效果Fig.7 Observation and compensation effects of disturbance based on IDOB with different time constants
由圖7(a)可知, 時間常數τ取0.001 和0.01時對干擾的估計延遲不大, 分別為0.005 s 和0.011 s; 而τ取0.05 和0.1 時, 時間延遲分別為0.048 s 和0.085 s。 由圖7(b)可知,τ取0.01 時相比τ取0.001 時對干擾的補償效果最大差10.07 μrad;而τ取0.05、 0.1 時相比τ取0.001 時對干擾的補償效果最大分別差59.53 μrad、71.62 μrad。 但由于τ取太小時IDOB 的帶寬過大,高頻噪聲難以抑制, 因此綜合考慮選取τ=0.01。
為了驗證模糊PID 控制和IDOB 方法的有效性和可行性, 對其分別進行Matlab/Simulink 仿真分析。 由于光電平臺系統中的轉動慣量和力矩系數等參數是時變的, 為此進行了參數變化±10%和模型參數為平均值兩種情況的仿真。
(1)模型參數變化±10%
當模型參數轉動慣量、 力矩系數不固定時,在1 Hz 和5 Hz 的正弦干擾條件下, 基于模糊PID控制的系統動態誤差峰值如表3 所示。

表3 模型參數變化±10%時的基于模糊PID 控制的系統動態誤差峰值Table 3 Peak value of system dynamic error based on fuzzy PID control when model parameters change ±10%
由表3 可知, 當光電平臺系統參數變化±10%時, 在正弦干擾頻率為1 Hz 條件下采用模糊控制的系統動態誤差峰值相差較小, 表明基于模糊PID的控制系統具有一定的魯棒性。 而干擾頻率變為高頻時, 系統動態誤差峰值相差較大, 模糊算法的魯棒性降低。
(2)模型參數為平均值
光電平臺伺服穩定控制系統轉動慣量、 軸端摩擦系數等主要參數如表4 所示。
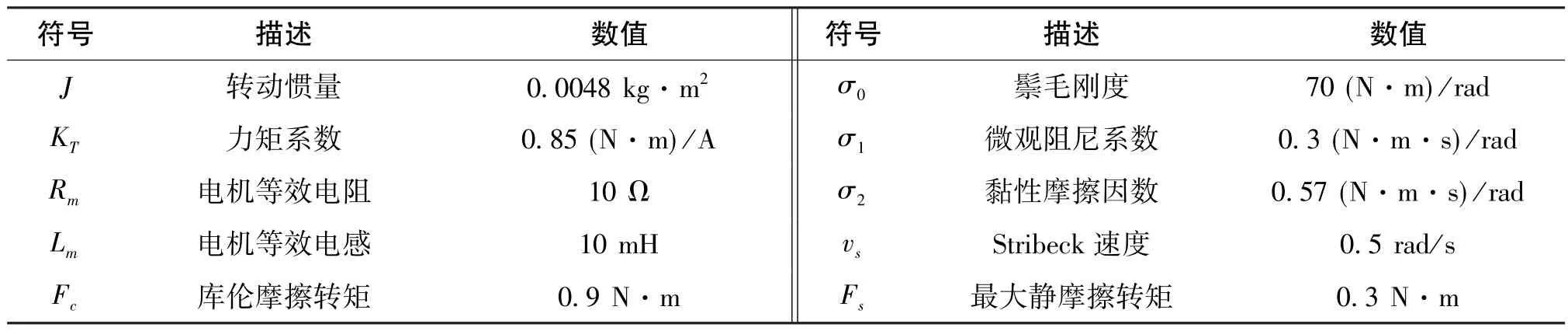
表4 光電平臺伺服穩定控制系統主要參數Table 4 Main parameters of servo stabilizing control system for photoelectric platform
為了驗證IDOB 對干擾估計的準確性, 分別給系統施加一個角速度峰值為1 (°) /s、 頻率為1 Hz和5 Hz 的干擾運動, 并由LuGre 摩擦模型產生相應的摩擦力矩, 通過IDOB 得到的擾動估計值如圖8 所示。

圖8 IDOB 對正弦干擾的估計Fig.8 Estimation of sinusoidal disturbance by IDOB
由圖8 的仿真結果可知, 在正弦干擾運動頻率為1 Hz 時, IDOB 對擾動的觀測值與實際值間的差值為0.0078 N·m, 表明IDOB 對擾動具有較好的估計效果。 但當正弦干擾運動頻率為5 Hz 時,IDOB 對擾動的估計準確性降低。
設置參考輸入u=0、 正弦干擾力矩輸入TL=0.02sin2πft(f=1 Hz、f=5 Hz)。 通過系統仿真,可得到傳統PID 和IDOB 控制策略的動態誤差對比, 如圖9 所示。
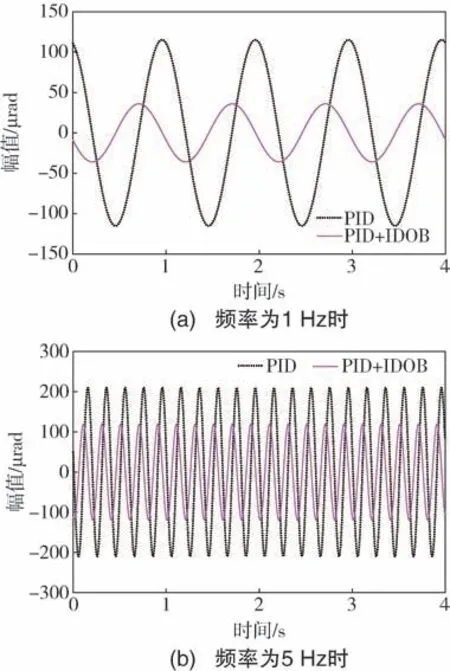
圖9 正弦干擾運動頻率為1 Hz 和5 Hz 時兩種方法的動態誤差對比Fig.9 Dynamic error comparison of two methods when sinusoidal disturbance motion frequency is 1 Hz and 5 Hz
由圖9 的仿真結果可知, 在1 Hz 正弦干擾條件下, 傳統PID 控制器會因超調量、 帶寬以及穩態時間等動態性能的約束, 對擾動補償的能力達到了極限, 系統輸出的動態誤差峰值為115.2 μrad,超出了穩定精度為100 μrad 的指標要求。 而IDOB輸出的動態誤差峰值為35.92 μrad, 在指標要求之內, 且由式(9)算出的動態誤差峰值為46.6 μrad,理論與仿真分析結果相近。 但當頻率為5 Hz 時,本文方法對擾動的補償效果降低。
3.2 實驗測試
為了測試本文復合算法對擾動的抑制效果,將光電平臺安裝在雙軸搖擺臺上, 并設置正弦搖擺幅值為1°、 頻率為0.5 Hz ~2 Hz, 如圖10 所示。陀螺采用的是ADIS16460, 采樣頻率為500 Hz。 控制軟件是基于keil uVision5 軟件編寫。 令光電平臺處于慣性穩定狀態, 通過獲得平臺伺服系統輸出的陀螺信號來分析對擾動的補償效果。 圖11 為在雙軸搖擺臺上通過IDOB 觀測到的擾動曲線。
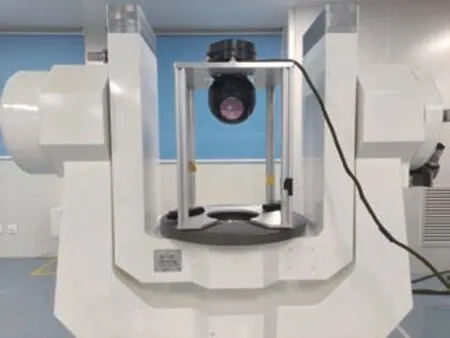
圖10 雙軸搖擺臺實驗Fig.10 Experiment of two-axis swing table
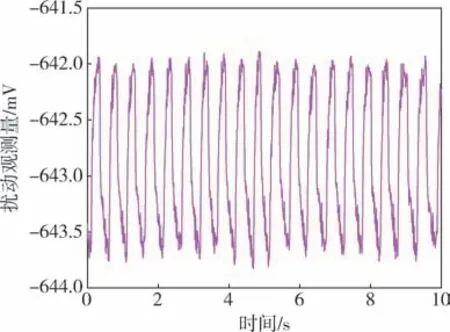
圖11 IDOB 觀測到的擾動曲線Fig.11 Disturbance curve observed by IDOB
通過正弦搖擺實驗, 獲得俯仰軸陀螺在干擾頻率為2 Hz 時的輸出情況, 如圖12 所示。 基于模糊PID 和復合控制兩種方法的光電平臺系統在0.5 Hz ~2 Hz 干擾頻率下的RMS 值如表5 所示。
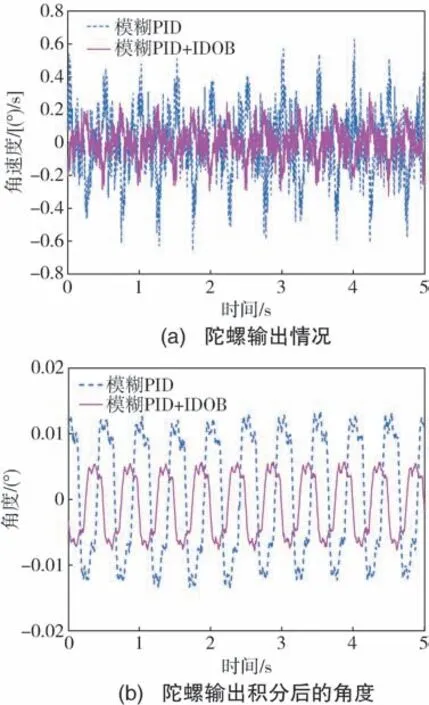
圖12 兩種方法在干擾頻率為2 Hz 時的俯仰軸陀螺輸出及積分后的角度Fig.12 Pitch axis gyro output and angle after integration for two methods when the disturbance is 2 Hz
由表5 可知, 經實驗數據處理后, 隨著正弦干擾頻率的增加, 基于模糊PID 和復合控制方法的控制系統穩定性逐漸變差, 但基于復合控制方法的光電平臺系統在頻率為2 Hz、 幅值為1°的正弦擾動條件下的RMS 值, 相比模糊PID 控制的RMS 值減小了12.24%。 由此可見, 本文提出的復合控制方法能夠有效提高光電平臺的穩定性。
4 結論
為了解決光電平臺軸端摩擦等干擾影響平臺系統視軸精度的問題, 提出了一種基于模糊算法與IDOB 的光電平臺復合控制方法, 即解決了在工程上控制系統易受時變低頻擾動影響的問題, 又可避免傳統DOB 在物理上難以實現的不足。 實驗結果表明, 在低頻干擾運動下, 基于模糊控制與IDOB復合控制的伺服系統, 具有較好的穩定性和魯棒性,對工程實踐具有參考意義。 但當干擾頻率為高頻時,本文復合控制方法應用效果不理想, 可通過加入模型預測控制進一步提高系統估計的帶寬。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19