基于機(jī)器視覺(jué)的大型艙段對(duì)接位姿測(cè)量方法
2023-04-29 03:43:26李瑞峰張力力
導(dǎo)航與控制 2023年6期
關(guān)鍵詞:測(cè)量
李瑞峰, 郭 靜, 楊 娜, 張力力, 程 軍
(西安航天賽能自動(dòng)化科技有限公司, 西安 710100)
0 引言
航空航天工業(yè)是一個(gè)關(guān)乎國(guó)家經(jīng)濟(jì)發(fā)展和國(guó)防建設(shè)的戰(zhàn)略性產(chǎn)業(yè), 匯集各種高新技術(shù)于一體,是國(guó)家工業(yè)實(shí)力的重要體現(xiàn)。 隨著航空航天領(lǐng)域飛機(jī)、 火箭等大型航天艙段類(lèi)產(chǎn)品總體裝配性能及測(cè)試階段技術(shù)要求的提高, 對(duì)大型艙段的裝配精度和自動(dòng)化程度要求越來(lái)越嚴(yán)格[1]。 目前, 國(guó)內(nèi)大型航天艙段的對(duì)接裝配大部分是通過(guò)將固定艙段和活動(dòng)艙段固定放置在對(duì)接臺(tái)上, 然后采用目視手工的作業(yè)方式。 在對(duì)接裝配過(guò)程中, 通過(guò)人眼估算活動(dòng)艙段在對(duì)接中所需要的調(diào)整量, 然后多名號(hào)手同步調(diào)整實(shí)現(xiàn)大型艙段自由度的位姿調(diào)整。 該裝配方式需要多人協(xié)同操作, 勞動(dòng)強(qiáng)度大, 裝配效率低, 裝配精度依賴(lài)工作人員的工作經(jīng)驗(yàn)和操作水平, 對(duì)接裝配質(zhì)量的一致性較差[2],當(dāng)艙段尺寸增大時(shí), 勞動(dòng)強(qiáng)度和裝配周期也急劇增加。
為了滿(mǎn)足靈活、 高效、 準(zhǔn)確的艙段對(duì)接需求,利用自動(dòng)化柔性裝配技術(shù)實(shí)現(xiàn)大型艙段的對(duì)接裝配成為必然趨勢(shì)。 國(guó)內(nèi)外一些高校、 自動(dòng)化裝配企業(yè)積極開(kāi)展大型艙段對(duì)接裝配的技術(shù)研究, 提供了解決方案。 美國(guó)波音公司的導(dǎo)彈對(duì)接方式采用激光跟蹤儀測(cè)量對(duì)接偏差位姿, 數(shù)字化管理系統(tǒng)根據(jù)偏差信息驅(qū)動(dòng)導(dǎo)軌式數(shù)控對(duì)接平臺(tái)完成導(dǎo)彈的艙段對(duì)接[3]。 美國(guó)雷聲公司導(dǎo)彈柔性對(duì)接系統(tǒng)采用直線(xiàn)導(dǎo)軌式數(shù)控對(duì)接平臺(tái), 可進(jìn)行六自由度艙段的位姿調(diào)整, 實(shí)現(xiàn)柔性化對(duì)接裝配。 在國(guó)內(nèi)應(yīng)用研究方面, 哈爾濱工業(yè)大學(xué)通過(guò)雙目視覺(jué)和測(cè)量轉(zhuǎn)換光筆方式實(shí)現(xiàn)了導(dǎo)彈艙段的自動(dòng)對(duì)接[4]。沈陽(yáng)自動(dòng)化研究所針對(duì)某艙段設(shè)計(jì)了導(dǎo)彈自動(dòng)對(duì)接平臺(tái), 通過(guò)龍門(mén)式的立體視覺(jué)測(cè)量技術(shù)獲取兩對(duì)接艙段的空間位姿信息, 采用裝卸有環(huán)形工裝的自由度調(diào)姿裝置作為對(duì)接艙段的調(diào)姿調(diào)整平臺(tái)[5]。 浙江大學(xué)的郭志敏等[6]研制了一套基于三坐標(biāo)支撐柱的位姿調(diào)整系統(tǒng), 該系統(tǒng)利用激光跟蹤儀對(duì)大型艙段上布設(shè)的靶球?qū)崟r(shí)測(cè)量位姿偏移量,通過(guò)控制POGO 柱實(shí)現(xiàn)大型艙段的姿態(tài)調(diào)整。 上海航天設(shè)備制造總廠(chǎng)研制了運(yùn)載火箭柔性自動(dòng)裝配設(shè)備, 實(shí)現(xiàn)了“測(cè)量-匹配-調(diào)姿” 的閉環(huán)集成控制, 可滿(mǎn)足不同類(lèi)型運(yùn)載火箭柔性自動(dòng)裝配需求[7]。
綜上, 目前成熟的自動(dòng)化裝配多采用激光跟蹤儀[8]進(jìn)行位姿測(cè)量。 該方法利用靶球或?qū)用嫣卣饔?jì)算空間姿態(tài), 具有精度高、 測(cè)量范圍大的特點(diǎn)。 但該方法設(shè)備成本較高, 每次裝配都需要詳細(xì)標(biāo)定, 標(biāo)定過(guò)程較為復(fù)雜, 且對(duì)測(cè)量環(huán)境有較高的要求。 相比激光跟蹤儀的測(cè)量, 雙目立體視覺(jué)測(cè)量方法具有成本低和使用便捷的優(yōu)點(diǎn)。 但是在實(shí)際應(yīng)用過(guò)程中, 雙目立體視覺(jué)系統(tǒng)容易受工業(yè)環(huán)境影響, 需要定期標(biāo)定系統(tǒng)參數(shù)以保證測(cè)量精度, 如果工作現(xiàn)場(chǎng)存在振動(dòng), 則標(biāo)定的頻次會(huì)增加, 從而影響應(yīng)用效果。
基于此, 本文提出了一種基于兩套單目視覺(jué)的大型艙段柔性自動(dòng)對(duì)接系統(tǒng)。 本文綜合考慮大型艙段表面特征較少且無(wú)法通過(guò)表面特征點(diǎn)之間的匹配關(guān)系準(zhǔn)確求得艙段的相對(duì)位姿這一情況,設(shè)計(jì)了高精度合作靶標(biāo), 利用單目視覺(jué)技術(shù), 結(jié)合預(yù)先標(biāo)定的靶標(biāo)和艙段對(duì)接面特征, 對(duì)兩套單目視覺(jué)測(cè)量結(jié)果進(jìn)行融合解算, 得到最終的艙段相對(duì)位置姿態(tài), 引導(dǎo)六自由度調(diào)姿定位機(jī)構(gòu)實(shí)現(xiàn)艙段位姿的高精度實(shí)時(shí)調(diào)整。
1 基于機(jī)器視覺(jué)的大型艙段自動(dòng)對(duì)接系統(tǒng)
本文設(shè)計(jì)的基于機(jī)器視覺(jué)的大型艙段自動(dòng)對(duì)接系統(tǒng)主要包括視覺(jué)系統(tǒng)、 高精度調(diào)姿平臺(tái)、 PLC控制系統(tǒng)、 對(duì)接車(chē)等, 如圖1 所示。 視覺(jué)系統(tǒng)用于對(duì)接裝配中大型艙段的實(shí)時(shí)定位測(cè)量; 高精度調(diào)姿平臺(tái)主要實(shí)現(xiàn)調(diào)姿端艙段的位姿調(diào)整動(dòng)作, 完成對(duì)接過(guò)程; PLC 控制系統(tǒng)根據(jù)視覺(jué)系統(tǒng)的測(cè)量數(shù)據(jù)控制調(diào)姿平臺(tái)進(jìn)行姿態(tài)及位置調(diào)整。
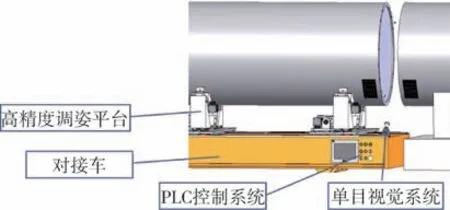
圖1 自動(dòng)對(duì)接系統(tǒng)組成圖Fig.1 Composition diagram of automatic docking system
1.1 高精度調(diào)姿平臺(tái)
在自動(dòng)對(duì)接系統(tǒng)中, 作為末端執(zhí)行單元, 執(zhí)行機(jī)構(gòu)是一個(gè)數(shù)字化自動(dòng)控制的高精度定位裝置,主要分為分布式對(duì)接工裝和托架式自動(dòng)對(duì)接工裝兩類(lèi)[9]。 本系統(tǒng)采用六自由度調(diào)姿平臺(tái)技術(shù), 高精度調(diào)姿平臺(tái)主要包括滾轉(zhuǎn)機(jī)構(gòu)、 水平機(jī)構(gòu)、 升降機(jī)構(gòu)、 俯仰機(jī)構(gòu), 配合實(shí)現(xiàn)艙段航向、 水平、 上下、 偏航、 俯仰、 滾轉(zhuǎn)六自由度的調(diào)整。
1.2 PLC 控制系統(tǒng)
PLC 控制系統(tǒng)作為對(duì)接系統(tǒng)的關(guān)鍵部件, 是整個(gè)系統(tǒng)的“大腦”, 起樞紐作用。 一方面, 接受來(lái)自視覺(jué)系統(tǒng)的對(duì)接位姿測(cè)量數(shù)據(jù), 并進(jìn)行分析和處理; 另一方面, 根據(jù)分析結(jié)果, 輸出相應(yīng)的控制指令給高精度調(diào)姿平臺(tái), 控制高精度調(diào)姿平臺(tái)運(yùn)動(dòng)到指定的位置, 實(shí)現(xiàn)艙段空間位姿的調(diào)整[10]。
1.3 單目視覺(jué)系統(tǒng)
高精度數(shù)字化空間位姿檢測(cè)是實(shí)現(xiàn)自動(dòng)對(duì)接的基礎(chǔ)。 視覺(jué)測(cè)量屬于非接觸測(cè)量方法, 可直接根據(jù)對(duì)接面的圖像信息控制完成對(duì)接。 因此, 視覺(jué)系統(tǒng)作為“眼睛” 是整個(gè)對(duì)接系統(tǒng)的核心組成部分, 其作用是通過(guò)精確檢測(cè)艙段的對(duì)接位姿引導(dǎo)調(diào)姿平臺(tái)完成快速、 安全對(duì)接, 具有非接觸、高精度、 速度快等特點(diǎn)[11]。 基于機(jī)器視覺(jué)的測(cè)量方法主要包括激光跟蹤儀、 單目視覺(jué)、 雙目視覺(jué)。 國(guó)外大多采用激光測(cè)量技術(shù)實(shí)現(xiàn)大型艙段的對(duì)接工作, 該方法設(shè)備成本較高。 雙目立體視覺(jué)不需要已知目標(biāo)點(diǎn)的幾何約束, 可直接求解目標(biāo)位姿, 但是需要定期標(biāo)定系統(tǒng)參數(shù)以保證測(cè)量精度, 結(jié)構(gòu)復(fù)雜且視野范圍較小, 局限大, 靈活性小。 單目視覺(jué)三維定位通常通過(guò)人工布設(shè)標(biāo)志點(diǎn), 根據(jù)已知目標(biāo)的幾何約束利用PNP(Perspective-n-point)算法實(shí)現(xiàn)空間姿態(tài)測(cè)量, 算法和結(jié)構(gòu)都較簡(jiǎn)單易實(shí)現(xiàn), 校準(zhǔn)方便, 無(wú)需反復(fù)標(biāo)定, 更適合現(xiàn)場(chǎng)長(zhǎng)期穩(wěn)定工作。 三種測(cè)量方法的對(duì)比如表1 所示。
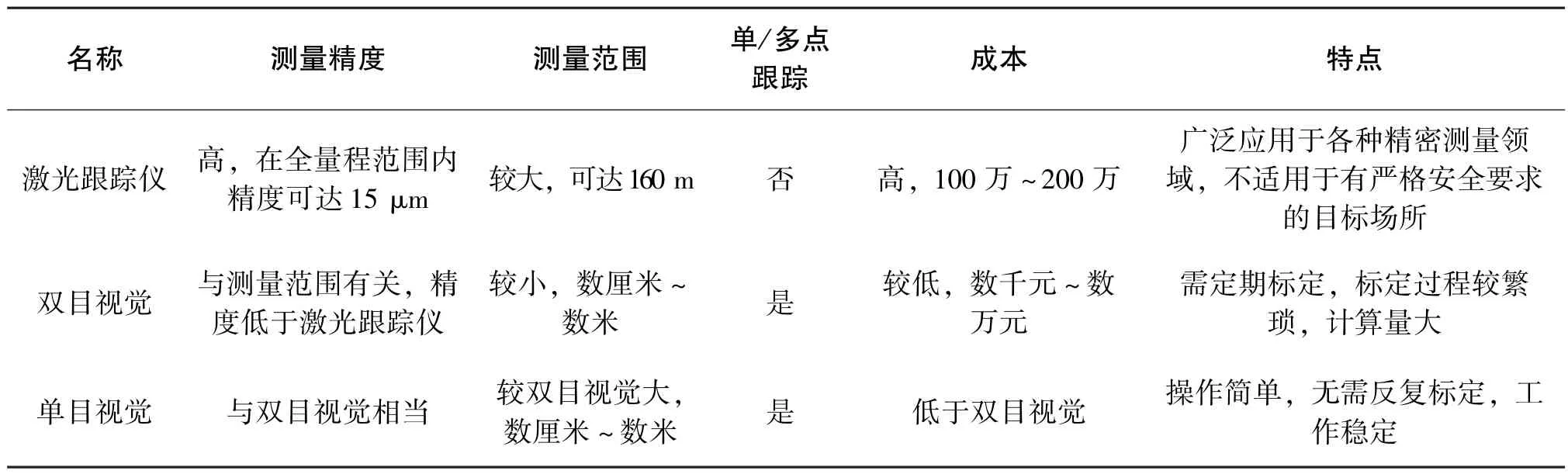
表1 基于機(jī)器視覺(jué)的測(cè)量方法比較Table 1 Comparison of measurement methods based on machine vision
大部分大型艙段端面設(shè)計(jì)有定位銷(xiāo)和定位槽,艙段圓周表面基本無(wú)用于識(shí)別的有效特征, 而對(duì)接端面很難通過(guò)相機(jī)一次采集到全部定位銷(xiāo)和定位槽的特征信息, 因此該應(yīng)用場(chǎng)景下雙目視覺(jué)“不需要已知目標(biāo)點(diǎn)幾何約束” 的優(yōu)勢(shì)已不明顯。通過(guò)人工在對(duì)接面兩側(cè)布設(shè)具有幾何約束的特征點(diǎn), 然后利用單目視覺(jué)進(jìn)行位姿測(cè)量更加符合現(xiàn)場(chǎng)應(yīng)用需要。 因此結(jié)合該應(yīng)用場(chǎng)景, 本文提出了一種基于單目視覺(jué)的大型艙段相對(duì)位姿測(cè)量方法,以實(shí)現(xiàn)大型艙段的自動(dòng)對(duì)接。
本文提出的單目視覺(jué)系統(tǒng)由測(cè)量單元和視覺(jué)測(cè)量軟件組成。 其中, 測(cè)量單元包括高分辨率工業(yè)相機(jī)、 低畸變鏡頭、 藍(lán)光光源。 測(cè)量單元是前端的傳感單元, 實(shí)時(shí)采集靶標(biāo)圖像, 并通過(guò)網(wǎng)線(xiàn)傳輸至工控機(jī)中的視覺(jué)軟件, 視覺(jué)軟件接收來(lái)自工業(yè)相機(jī)的圖像, 實(shí)時(shí)解算相對(duì)位姿, 通過(guò)通信模塊將位姿解算結(jié)果傳輸至PLC 控制系統(tǒng)。
2 基于單目視覺(jué)的艙段對(duì)接位姿測(cè)量
2.1 對(duì)接位姿測(cè)量系統(tǒng)及對(duì)接流程
針對(duì)大尺寸艙段對(duì)接裝配場(chǎng)景, 本文提出了一種基于單目視覺(jué)的對(duì)接位姿實(shí)時(shí)測(cè)量方法。 單目視覺(jué)位姿測(cè)量精度與特征點(diǎn)識(shí)別誤差大小相關(guān),在自然環(huán)境下視覺(jué)傳感器提取目標(biāo)特征難度較大。基于此, 本文采用了基于合作靶標(biāo)的位姿測(cè)量方法保證了系統(tǒng)的精度和穩(wěn)定性。 設(shè)計(jì)了一種基于環(huán)狀編碼的點(diǎn)陣規(guī)格排布的合作靶標(biāo), 如圖2 所示。 該靶標(biāo)包含45 個(gè)標(biāo)志點(diǎn), 即4 個(gè)編碼標(biāo)志點(diǎn)和41 個(gè)非編碼標(biāo)志點(diǎn)。 其中, 編碼標(biāo)志點(diǎn)可以根據(jù)編碼標(biāo)志點(diǎn)解碼算法唯一識(shí)別, 進(jìn)一步地非編碼標(biāo)志點(diǎn)的序號(hào)可以根據(jù)其在圖案中與編碼標(biāo)志點(diǎn)的位置關(guān)系進(jìn)行確定。 特征點(diǎn)采用白色可反光材質(zhì), 與黑色啞光背景對(duì)比明顯, 易于特征提取,具有較高的穩(wěn)定性。
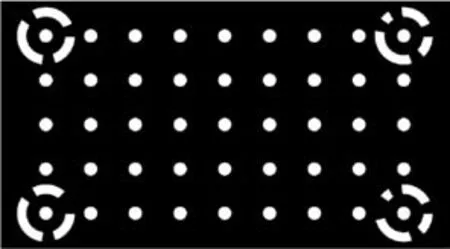
圖2 合作靶標(biāo)設(shè)計(jì)Fig.2 Design of collaborative target
合作靶標(biāo)和單目視覺(jué)系統(tǒng)共同構(gòu)成對(duì)接位姿測(cè)量系統(tǒng), 系統(tǒng)框架如圖3 所示, 分為應(yīng)用層、 算法層、 信息層與物理層。 應(yīng)用層將測(cè)量過(guò)程分為目標(biāo)位姿求取、 對(duì)接位姿解算和對(duì)接狀態(tài)分析三部分; 算法層為對(duì)接位姿測(cè)量涉及到的所有算法;信息層包含了系統(tǒng)涉及到的數(shù)據(jù); 物理層主要包含視覺(jué)測(cè)量單元、 合作靶標(biāo)和工控機(jī)。
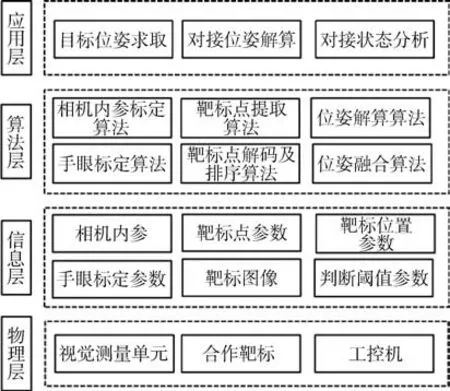
圖3 對(duì)接位姿測(cè)量系統(tǒng)框架Fig.3 System framework of docking pose measurement
在對(duì)接過(guò)程中, 保持一個(gè)艙段不動(dòng)(稱(chēng)為固定端), 只對(duì)另一艙段(稱(chēng)為調(diào)姿端) 進(jìn)行位姿調(diào)整,將固定端和調(diào)姿端分隔開(kāi)的面稱(chēng)為對(duì)接面。 合作靶標(biāo)分別固定在固定端和調(diào)姿端對(duì)接面兩側(cè), 靶標(biāo)唯一代表所安裝艙段的位姿, 因此靶標(biāo)的安裝精度直接關(guān)系到艙段的位姿測(cè)量結(jié)果, 進(jìn)而影響最終的對(duì)接效果。 靶標(biāo)的安裝精度越高, 對(duì)接位姿測(cè)量結(jié)果越準(zhǔn)確。 結(jié)合項(xiàng)目精度指標(biāo)要求和工程實(shí)踐經(jīng)驗(yàn), 靶標(biāo)的安裝精度需設(shè)計(jì)保證在0.1 mm 以?xún)?nèi)為宜。
對(duì)接前首先執(zhí)行系統(tǒng)標(biāo)定, 主要包括相機(jī)內(nèi)參標(biāo)定、 相機(jī)與高精度調(diào)姿平臺(tái)坐標(biāo)系轉(zhuǎn)換標(biāo)定(即“手眼標(biāo)定”)、 使用高精度測(cè)量設(shè)備對(duì)靶標(biāo)與所在艙段的位置標(biāo)定, 系統(tǒng)標(biāo)定在對(duì)接任務(wù)執(zhí)行前進(jìn)行, 一般情況下僅需標(biāo)定一次。
本文所提的對(duì)接位姿測(cè)量大致可以分為三大步驟: 靶標(biāo)圖像數(shù)據(jù)采集、 最優(yōu)位姿計(jì)算、 執(zhí)行調(diào)節(jié), 循環(huán)執(zhí)行直至對(duì)接誤差收斂至指定閾值范圍內(nèi)。 具體工作流程為: 1)測(cè)量單元采集調(diào)姿端和固定端艙段上的靶標(biāo)圖像, 靶標(biāo)上所有標(biāo)志點(diǎn)均在圖像視野范圍內(nèi); 2)采用高精度圖像處理算法識(shí)別并提取靶標(biāo)標(biāo)志點(diǎn)坐標(biāo); 3)利用基于單目視覺(jué)的測(cè)量原理, 計(jì)算靶標(biāo)坐標(biāo)系與相機(jī)坐標(biāo)系的位姿轉(zhuǎn)換關(guān)系; 4)通過(guò)預(yù)先標(biāo)定的靶標(biāo)與所在艙段位置參數(shù), 計(jì)算艙段對(duì)接面特征在相機(jī)坐標(biāo)系下的三維坐標(biāo); 5)計(jì)算最優(yōu)對(duì)接位姿, 并判斷是否滿(mǎn)足對(duì)接條件; 6)將檢測(cè)結(jié)果發(fā)送給PLC 控制系統(tǒng), 引導(dǎo)調(diào)姿機(jī)構(gòu)運(yùn)動(dòng)至指定對(duì)接位置; 7) 重復(fù)執(zhí)行步驟1 ~步驟6 直至滿(mǎn)足迭代收斂條件。 工作流程具體如圖4 所示。
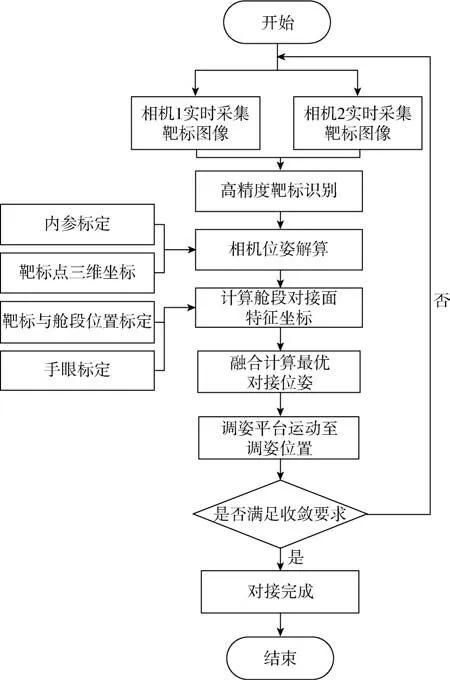
圖4 對(duì)接工作流程圖Fig.4 Flowchart of docking
2.2 基于兩套單目視覺(jué)融合的對(duì)接位姿求解算法
受大型艙段尺寸較大(直徑約2 m)及靶標(biāo)坐標(biāo)系、 相機(jī)坐標(biāo)系、 調(diào)姿平臺(tái)坐標(biāo)系、 艙段坐標(biāo)系等多坐標(biāo)系轉(zhuǎn)換等因素限制, 僅通過(guò)布設(shè)一個(gè)單目相機(jī)組件較難精確計(jì)算兩個(gè)大型艙段之間的相對(duì)位姿。 為了解決這一問(wèn)題, 本文提出了一種基于兩套單目視覺(jué)融合的測(cè)量方法, 通過(guò)增大測(cè)量域, 得到更為精確的實(shí)時(shí)對(duì)接位姿測(cè)量結(jié)果。 如圖5 所示, 兩套單目相機(jī)分別布設(shè)在艙段兩側(cè), 軸線(xiàn)夾角成90°對(duì)稱(chēng)分布。
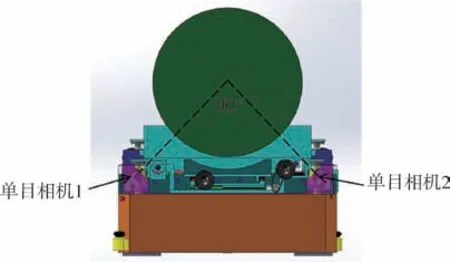
圖5 單目相機(jī)分布Fig.5 Distribution of monocular cameras
對(duì)接位姿的求解涉及6 個(gè)坐標(biāo)系, 定義如下:調(diào)姿端艙段坐標(biāo)系、 固定端艙段坐標(biāo)系、 調(diào)姿端靶標(biāo)坐標(biāo)系、 固定端靶標(biāo)坐標(biāo)系、 相機(jī)坐標(biāo)系、調(diào)姿機(jī)構(gòu)坐標(biāo)系。 調(diào)姿端艙段坐標(biāo)系和固定端艙段坐標(biāo)系之間的相對(duì)位姿轉(zhuǎn)換關(guān)系為最終對(duì)接位姿的目標(biāo)輸出量。 單目相機(jī)安裝在對(duì)接車(chē)上, 相機(jī)坐標(biāo)系與調(diào)姿平臺(tái)坐標(biāo)系之間的轉(zhuǎn)換關(guān)系可以通過(guò)手眼標(biāo)定方法解算得到。 調(diào)姿端艙段坐標(biāo)系與調(diào)姿端靶標(biāo)坐標(biāo)系的轉(zhuǎn)換關(guān)系、 固定端艙段坐標(biāo)系與固定端靶標(biāo)坐標(biāo)系的轉(zhuǎn)換關(guān)系通過(guò)攝影測(cè)量系統(tǒng)等高精度測(cè)量設(shè)備標(biāo)定。 因此, 相機(jī)坐標(biāo)系與調(diào)姿平臺(tái)坐標(biāo)系之間的轉(zhuǎn)換關(guān)系、 艙段坐標(biāo)系與靶標(biāo)坐標(biāo)系之間的轉(zhuǎn)換關(guān)系均是固定不變的,僅有相機(jī)坐標(biāo)系和調(diào)姿端靶標(biāo)坐標(biāo)系、 固定端靶標(biāo)坐標(biāo)系之間的轉(zhuǎn)換關(guān)系是未知的, 且在對(duì)接過(guò)程中不斷變化, 可以通過(guò)相機(jī)采集的靶標(biāo)圖像,結(jié)合預(yù)先輸入的靶標(biāo)空間三維靶標(biāo), 利用單目視覺(jué)空間定位技術(shù), 實(shí)時(shí)解算靶標(biāo)坐標(biāo)系相對(duì)于相機(jī)坐標(biāo)系的空間位姿, 進(jìn)而通過(guò)坐標(biāo)系轉(zhuǎn)換關(guān)系解算調(diào)姿端艙段相對(duì)于固定端艙段的坐標(biāo)系轉(zhuǎn)換關(guān)系, 即對(duì)接位姿。
如圖6 所示, 對(duì)接位姿測(cè)量原理為: 利用高精度測(cè)量設(shè)備標(biāo)定安裝在固定端艙段表面的靶標(biāo)及對(duì)應(yīng)的艙段特征點(diǎn)(銷(xiāo)軸)、 移動(dòng)端艙段表面的靶標(biāo)及對(duì)應(yīng)的艙段特征點(diǎn)(銷(xiāo)孔), 分別為。 由于靶標(biāo)標(biāo)志點(diǎn)和對(duì)接面特征點(diǎn)坐標(biāo)均在同一個(gè)坐標(biāo)系下獲取, 因此該組坐標(biāo)代表了靶標(biāo)與對(duì)應(yīng)艙段的位置關(guān)系。
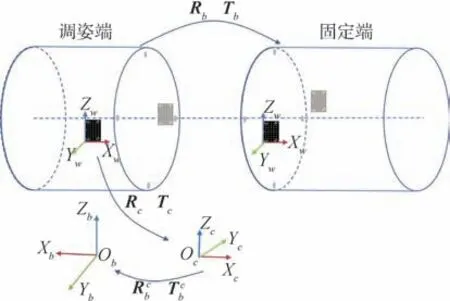
圖6 相對(duì)位姿計(jì)算原理示意圖Fig.6 Schematic diagram of relative pose calculation principle
對(duì)接時(shí), 相機(jī)拍攝待對(duì)接狀態(tài)下的大型艙段,同時(shí)獲取調(diào)姿艙段靶標(biāo)和固定艙段靶標(biāo)圖像, 靶標(biāo)上所有特征點(diǎn)均在圖像內(nèi)。 通過(guò)高精度圖像處理算法提取靶標(biāo)特征點(diǎn)圓心坐標(biāo)并排序, 分別記為P1、P2。 根據(jù)相機(jī)內(nèi)部參數(shù)與畸變系數(shù)的標(biāo)定結(jié)果, 結(jié)合提取的靶標(biāo)特征點(diǎn)圓心的圖像坐標(biāo)P1、P2, 三維世界坐標(biāo), 利用PNP 算法分別計(jì)算調(diào)姿艙段靶標(biāo)、 固定艙段靶標(biāo)在單目相機(jī)坐標(biāo)系下的坐標(biāo)以及相機(jī)坐標(biāo)系與靶標(biāo)坐標(biāo)系的旋轉(zhuǎn)變換矩陣Rc、Tc。
艙段對(duì)接面兩側(cè)銷(xiāo)軸/銷(xiāo)孔在相機(jī)坐標(biāo)系下的坐標(biāo)為
兩套單目相機(jī)分別獨(dú)立計(jì)算出對(duì)接面兩側(cè)銷(xiāo)孔在高精度調(diào)姿平臺(tái)坐標(biāo)系下的坐標(biāo), 利用最小二乘法, 通過(guò)構(gòu)建SVD 函數(shù), 求解兩個(gè)艙段在高精度調(diào)姿平臺(tái)坐標(biāo)系下的剛體變換關(guān)系Rb和Tb
根據(jù)對(duì)接工藝要求, 需要將兩艙段之間的相對(duì)位姿解算為自由度參數(shù), 相對(duì)位姿矩陣如式(6)所示, 左上方三行三列為旋轉(zhuǎn)矩陣, 右方三行一列為平移向量。 利用歐拉角與旋轉(zhuǎn)矩陣關(guān)系, 解算出如式(7)所示的基于高精度調(diào)姿平臺(tái)坐標(biāo)系的俯仰角θ、 偏航角ψ、 滾轉(zhuǎn)角φ。
3 實(shí)驗(yàn)結(jié)果與分析
3.1 測(cè)量精度實(shí)驗(yàn)
為了驗(yàn)證視覺(jué)系統(tǒng)的測(cè)量精度, 搭建了一套姿態(tài)測(cè)量實(shí)驗(yàn)平臺(tái), 如圖7 所示。 該實(shí)驗(yàn)平臺(tái)主要由六關(guān)節(jié)工業(yè)機(jī)器人、 高精度激光跟蹤儀(品牌:Leica, 型號(hào): AT960MR, 測(cè)量誤差小于15 μm +6 μm/m)、 靶標(biāo)、 相機(jī) ( 品牌型號(hào): 大華A5501MG20)、 鏡頭 ( 品牌型號(hào): 長(zhǎng)步道HC1205A)、 光源、 工控機(jī)、 交換機(jī)等組成。 如圖8 所示, 靶球和靶標(biāo)通過(guò)特制工裝安裝在機(jī)器人末端, 由機(jī)器人攜帶靶球和靶標(biāo)在空間中分別沿機(jī)器人X軸、Y軸、Z軸方向移動(dòng), 激光跟蹤儀和視覺(jué)測(cè)量單元分別跟蹤靶球和靶標(biāo)并測(cè)量移動(dòng)距離, 以激光跟蹤儀重復(fù)三次測(cè)量的平均值作為真值, 計(jì)算視覺(jué)測(cè)量單元的測(cè)量精度。 實(shí)驗(yàn)結(jié)果如表2、 圖9 所示。
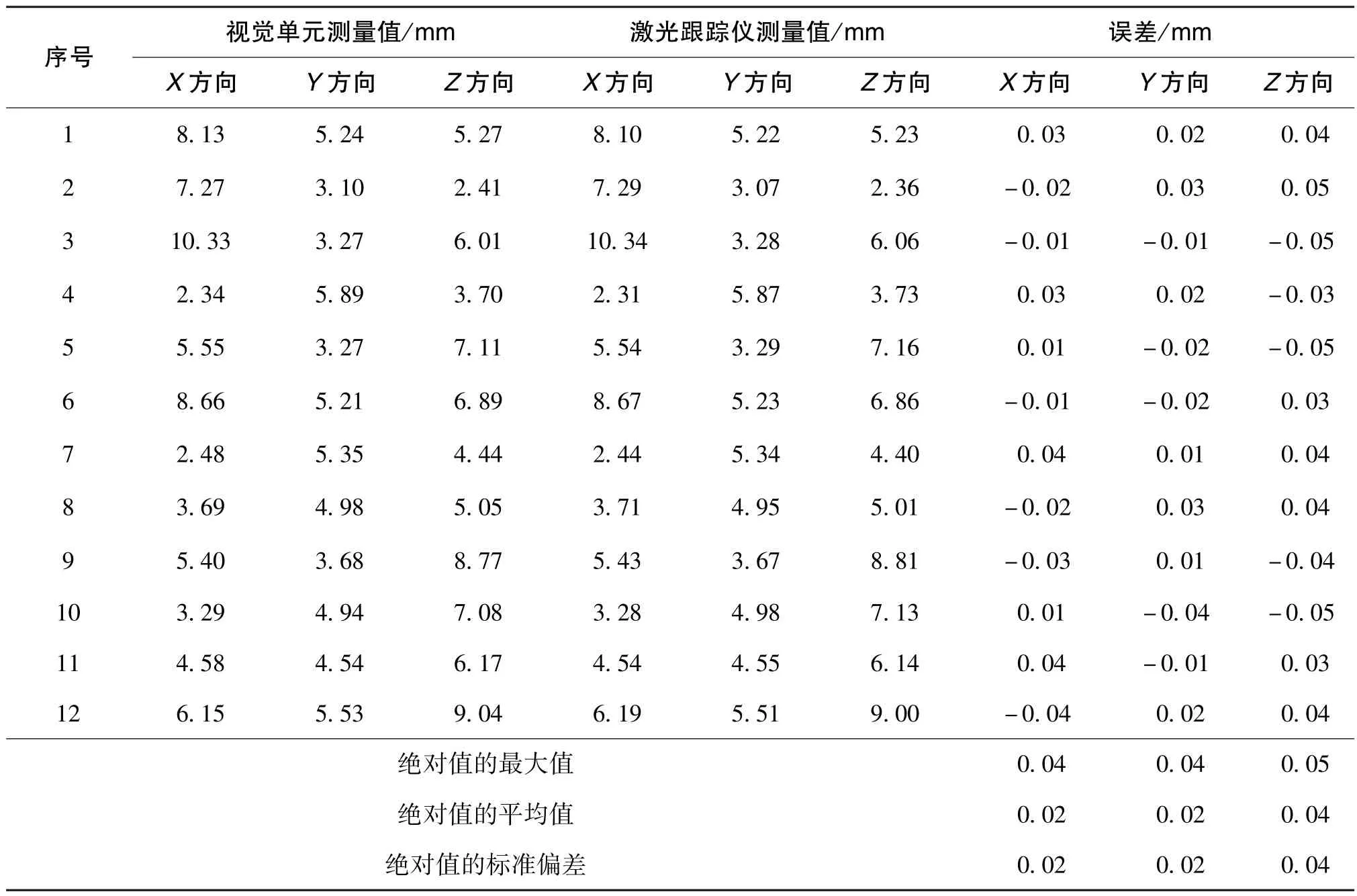
表2 視覺(jué)系統(tǒng)的測(cè)量精度數(shù)據(jù)Table 2 Measurement accuracy data of visual system

圖7 姿態(tài)測(cè)量實(shí)驗(yàn)平臺(tái)示意圖Fig.7 Schematic diagram of attitude measurement experiment platform

圖8 靶球和靶標(biāo)安裝圖Fig.8 Diagram of target ball and target installation
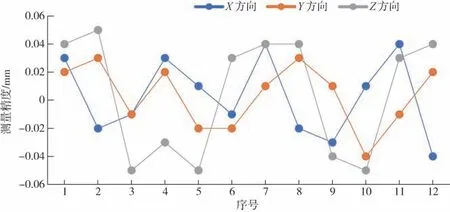
圖9 視覺(jué)系統(tǒng)的測(cè)量誤差Fig.9 Measurement error of visual system
由表2、 圖9 可知, 視覺(jué)系統(tǒng)的測(cè)量精度均在0.05 mm 以?xún)?nèi)。 其中,X方向和Y方向測(cè)量誤差最大值為0.04 mm, 平均值和標(biāo)準(zhǔn)偏差為0.02 mm;Z方向精度稍差, 測(cè)量誤差最大值為0.05 mm, 平均值和標(biāo)準(zhǔn)偏差為0.04 mm。 因?yàn)閱文恳曈X(jué)系統(tǒng)對(duì)于深度方向信息不敏感, 所以X方向和Y方向的測(cè)量精度優(yōu)于Z 方向。
3.2 單目視覺(jué)對(duì)接精度實(shí)驗(yàn)
為了驗(yàn)證基于單目視覺(jué)艙段對(duì)接系統(tǒng)的可行性和對(duì)接精度, 采用模擬產(chǎn)品(產(chǎn)品直徑約2000 mm,對(duì)接面銷(xiāo)軸/銷(xiāo)孔單邊間隙為0.5 mm)搭建對(duì)接裝配場(chǎng)景。 如圖10 所示, 對(duì)接系統(tǒng)主要包括調(diào)姿端艙段與固定端艙段模擬件、 高精度調(diào)姿平臺(tái)、 對(duì)接車(chē)以及測(cè)量單元等, 靶標(biāo)通過(guò)專(zhuān)用工裝固定在艙段表面, 兩個(gè)測(cè)量單元分別固定于對(duì)接車(chē)兩側(cè), 高精度調(diào)姿平臺(tái)承載調(diào)姿端艙段, 固定端艙段固定放置于指定位置。
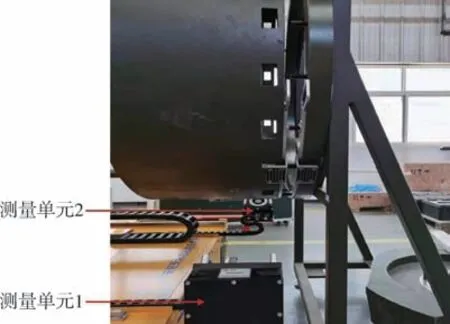
圖10 對(duì)接實(shí)驗(yàn)現(xiàn)場(chǎng)圖Fig.10 Field diagram of docking experiment
實(shí)驗(yàn)前, 首先對(duì)兩個(gè)相機(jī)進(jìn)行內(nèi)參標(biāo)定和手眼標(biāo)定。 相機(jī)1 的內(nèi)參標(biāo)定結(jié)果為: 焦距(fx,fy) =(2619.5348, 2619.1527)、 光學(xué)中心(Cx,Cy)=(1292.4044,1006.5532)、 畸變系數(shù)D=(k1,k2,p1,p2,k3) = ( -0.1554, 0.1452, 0.0011,-0.0010, -0.0220)。 相機(jī)1 坐標(biāo)系與調(diào)姿平臺(tái)坐標(biāo)系的旋轉(zhuǎn)矩陣和平移矩陣分別為
相機(jī)2 的內(nèi)參標(biāo)定結(jié)果為: 焦距(fx,fy) =(2620.4040, 2620.4660)、 光學(xué)中心(Cx,Cy) =(1312.2364, 1016.2072)、 畸變系數(shù)D= (k1,k2,p1,p2,k3) = ( -0.1599, 0.1543, -0.0005,-0.0009, -0.0244)。 相機(jī)2 坐標(biāo)系與調(diào)姿平臺(tái)坐標(biāo)系的旋轉(zhuǎn)矩陣和平移矩陣分別為
在某個(gè)固定位置, 保持對(duì)接艙段間距為100 mm,利用單目視覺(jué)(僅使用測(cè)量單元1)多次重復(fù)對(duì)接實(shí)驗(yàn), 分析對(duì)接系統(tǒng)的精度。 評(píng)價(jià)對(duì)接質(zhì)量的重要指標(biāo)為固定端和調(diào)姿端對(duì)接面上關(guān)鍵點(diǎn)之間的相對(duì)誤差是否滿(mǎn)足要求, 因此本文選用高精度激光跟蹤儀測(cè)量銷(xiāo)軸和銷(xiāo)孔的位置關(guān)系, 計(jì)算系統(tǒng)的對(duì)接精度, 具體步驟為:
1)使用激光跟蹤儀分別測(cè)量調(diào)姿端和固定端對(duì)應(yīng)銷(xiāo)孔的三維坐標(biāo);
2)以其中一個(gè)點(diǎn)為原點(diǎn), 軸方向?yàn)閆軸建立坐標(biāo)系, 比較銷(xiāo)孔相應(yīng)點(diǎn)在X方向、Y方向的偏差;
3)共重復(fù)6 組實(shí)驗(yàn), 測(cè)試結(jié)果如表3 所示。
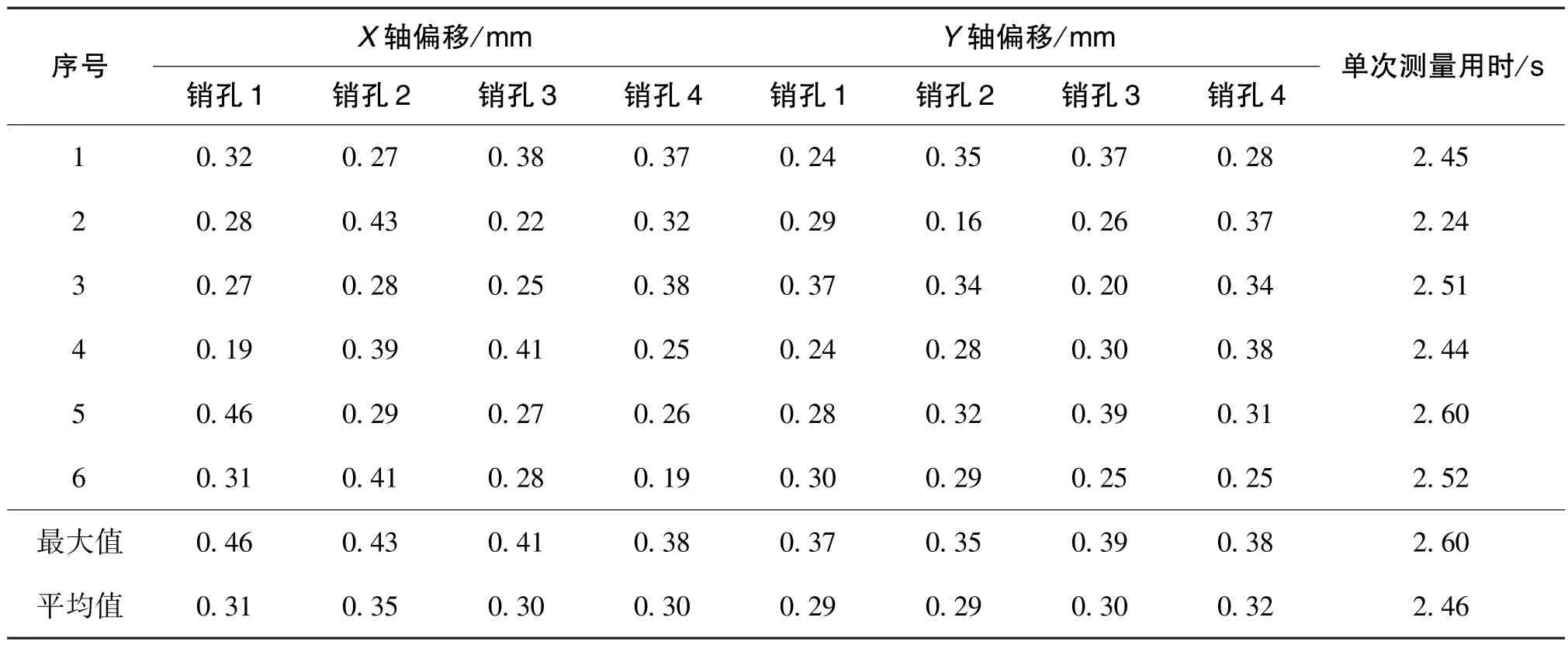
表3 單目視覺(jué)的對(duì)接精度數(shù)據(jù)Table 3 Docking accuracy data of monocular vision
由表3 可知, 采用單目視覺(jué)測(cè)量方法共進(jìn)行了6 次對(duì)接實(shí)驗(yàn),X方向上四個(gè)銷(xiāo)孔位移平均值分別為0.31 mm、 0.35 mm、 0.30 mm、 0.30 mm,Y方向上四個(gè)銷(xiāo)孔位移平均值分別為0.29 mm、0.29 mm、0.30 mm、 0.32 mm, 單次測(cè)量平均用時(shí)為2.46 s, 可實(shí)現(xiàn)大型艙段對(duì)接裝配過(guò)程中的實(shí)時(shí)位姿測(cè)量。 該實(shí)驗(yàn)證明了本文所提單目視覺(jué)測(cè)量艙段對(duì)接位姿的可行性。
3.3 基于兩套單目視覺(jué)的對(duì)接精度實(shí)驗(yàn)
為了驗(yàn)證本文提出的基于兩套單目視覺(jué)的測(cè)量方法相較于一套單目視覺(jué)測(cè)量的精度提升效果, 采用兩套單目視覺(jué)(同時(shí)使用測(cè)量單元1 和測(cè)量單元2 進(jìn)行測(cè)量) 重復(fù)上述對(duì)接實(shí)驗(yàn)。 兩個(gè)測(cè)量單元夾角成90°分布在對(duì)接車(chē)兩側(cè), 光軸方向指向艙段。 對(duì)接效果如圖11 所示, 對(duì)接精度如表4 所示。
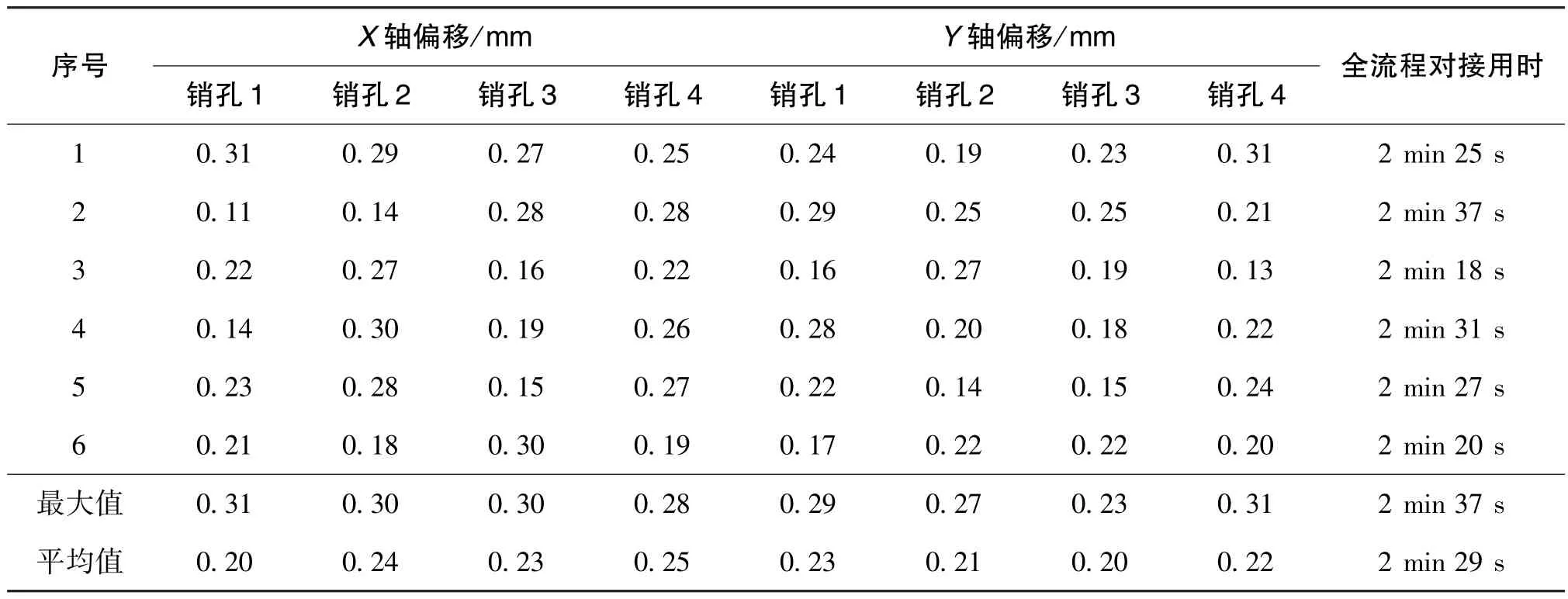
表4 基于兩套單目視覺(jué)的對(duì)接精度數(shù)據(jù)Table 4 Docking accuracy data based on two sets of monocular vision

圖11 對(duì)接效果示意圖Fig.11 Diagram of docking effect
2 個(gè)平移分量的平均對(duì)接精度相較于一套單目視覺(jué)的對(duì)接精度有所改善,X方向上四個(gè)銷(xiāo)孔位移平均值分別為0.20 mm、 0.24 mm、 0.23 mm、0.25 mm,Y方向上四個(gè)銷(xiāo)孔位移平均值分別為0.23 mm、 0.21 mm、 0.20 mm、 0.22 mm。 如圖12、圖13 所示, 兩套單目視覺(jué)的對(duì)接精度比一套單目視覺(jué)的對(duì)接精度平均改善約0.1 mm。 對(duì)接后艙段對(duì)接端面間隙均勻, 滿(mǎn)足大型艙段實(shí)時(shí)位姿測(cè)量要求和精度要求。 此外, 相較于“目視人喊手工推” 的對(duì)接方式, 本文提出的方法對(duì)接全流程用時(shí)由60 min 縮減到了3.5 min, 大大提升了產(chǎn)品對(duì)接的效率。
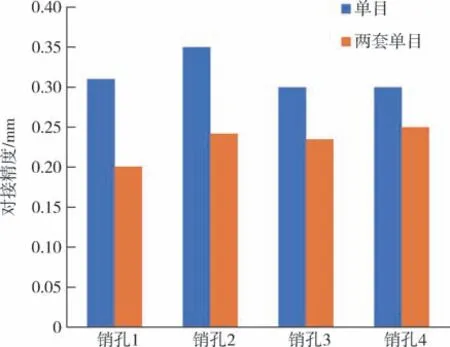
圖12 X 軸方向?qū)泳葘?duì)比Fig.12 Comparison of docking accuracy in X-axis direction
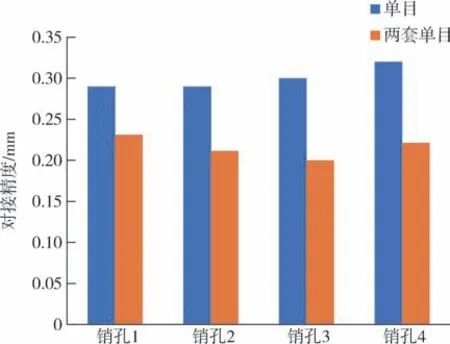
圖13 Y 軸方向?qū)泳葘?duì)比Fig.13 Comparison of docking accuracy in Y-axis direction
4 結(jié)論
本文提出了一種基于機(jī)器視覺(jué)的自動(dòng)對(duì)接系統(tǒng), 通過(guò)兩套單目視覺(jué)精確測(cè)量艙段表面靶標(biāo)位姿, 結(jié)合預(yù)先建立的艙段坐標(biāo)系計(jì)算艙段對(duì)接面特征位置信息, 精確計(jì)算艙段相對(duì)位姿, 引導(dǎo)六自由度調(diào)姿平臺(tái)實(shí)現(xiàn)艙段位姿的實(shí)時(shí)調(diào)整。 實(shí)驗(yàn)結(jié)果表明, 視覺(jué)測(cè)量精度在0.04 mm 以?xún)?nèi), 系統(tǒng)對(duì)接精度在0.3 mm 以?xún)?nèi), 實(shí)現(xiàn)了高精度對(duì)接, 具有很強(qiáng)的應(yīng)用價(jià)值。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級(jí)版)(2015年4期)2015-04-29 00:00:00