基于機器視覺的油田儀表示數自動識別方法
2023-04-23 19:20:09趙磊
科技資訊 2023年6期
關鍵詞:機器視覺
趙磊


摘要:傳統的以指針定位為基礎進行儀表示數識別主要通過人眼確定指針位置,導致識別結果誤差較大。因此,該研究將機器視覺應用在自動識別中,設計一種新的油田儀表示數識別方法。針對CCD攝像機拍攝的油田儀表圖像,進行光照均衡、圖像校正和圖像分割處理,再通過Faster-RCNN網絡結構檢測并提取儀表示數圖像的目標識別區域。運用機器視覺算法獲取儀表刻度數值信息,并精準定位儀表指針位置。根據指針與最小刻度線夾角,自動識別出當前儀表示數。實驗結果表明:所提方法的示數識別結果最大絕對誤差僅為0.01?MPa,可滿足油田儀表示數識別精度要求。
關鍵詞:機器視覺??油田儀表??圖像識別??目標檢測???指針定位???透視變換矩陣
The?Automatic?Recognition?Method?of?OilField?Instrument?Indication?Based?on?Machine?Vision
ZHAO?Lei
(Liaohe?Oilfield?Materials?Company,??Panjin,?Liaoning?Province,124010??China)
Abstract:The?traditional?instrument?indication?recognition?based?on?pointer?positioning?mainly?determines?the?pointer?position?through?human?eyes,?which?results?in?a?large?error?in?the?recognition?result.?Therefore,?this?study?applies?machine?vision?to?automatic?recognition,?and?designs?a?new?recognition?method?of?oilfield?instrument?indication.?The?oilfield?instrument?image?captured?by?CCD?camera?is?carried?out?the?illumination?equalization,?image?correction?and?image?segmentation,?and?then?the?target?recognition?area?of?the?instrument?indication?image?is?detected?and?extracted?through?Faster-RCNN?network?structure.?The?machine?vision?algorithm?is?used?to?obtain?the?scale?value?information?of?the?instrument?and?accurately?locate?the?pointer?position?of?the?instrument.?According?to?the?angle?between?the?pointer?and?the?minimum?scale?line,?the?current?instrument?indication?is?automatically?recognized.?The?experimental?results?show?that?the?maximum?absolute?error?of?the?indicator?identification?result?of?the?proposed?method?is?only?0.01?MPa,?which?can?meet?the?accuracy?requirements?of?oilfield?instrument?indicator?identification.
Key?Words:?Machine?vision;?Oilfield?instrument;?Image?recognition;?Target?detection;?Pointer?positioning;?Perspective?transformation?matrix
現代科學技術的發展,引起了信息技術領域的進步,各行各業都開始向著數字化方向進步[1]。尤其對于化工行業來說,為保證生產的安全性,更需要對生產過程進行精準監控和測量。電子數顯式儀表具有直觀性、高精度的特點[2],在石油化工領域發揮了巨大作用,但是測量數值的獲取依舊需要通過人眼識別。面對動輒持續數十個小時的生產工作,依靠人工的方式讀取油田儀表示數,極易出現數據錄入錯誤問題[3]。對此,需要設計一種自動化識別方法,智能獲取油田儀表數據。
參考傳統的儀表示數識別策略,文中提出將機器視覺技術應用到油田儀表指針定位過程中,得到更加準確的指針定位結果,再計算當前指針與儀表刻度之間的夾角,獲取儀表示數自動識別結果。
1以機器視覺為基礎設計油田儀表示數自動識別方法
1.1油田儀表圖像預處理
應用CCD攝像機拍攝工作中的油田儀表圖像,完成圖像采集工作。考慮到圖像采集環境中,會受到天氣、光照等因素的影響,導致拍攝圖像質量較差,需要進行光照均衡處理、圖像配準處理和圖像分割處理[4],得到預處理后的油田儀表圖像。
設置完全不同的陰影區域和非陰影區域的輸入,運用局部匹配算法對采集圖像進行陰影檢測。將影子像素看作圖像的前景區,借助消光技術設置合理的陰影恢復系數,并獲取光照與環境光照得到比例系數[5]。基于該比例系數展開二次光照處理,得到光照均衡處理后的圖像。
通過FAST-9算法將光照均衡處理后的圖像的特征點提取出來,并描述為二進制的字符串。引入特征匹配概念,建立透視變換矩陣,分析實時采集的油田儀表圖像與參考圖像之間的差異,并實現圖像校正。已知特征匹配點坐標的情況下,假設其特征點的![]() 軸上下方向延伸正好穿過視域體的中心,則其透視變換矩陣可表示為:
軸上下方向延伸正好穿過視域體的中心,則其透視變換矩陣可表示為:
經過光照均衡處理后,油田儀表圖像的目標區域和背景區域之間的差異度不斷降低,會對儀表示數識別產生干擾。因此,在圖像預處理過程中,運用最大類間方差法進行圖像分割,針對分割后的圖像展開示數自動識別。
1.2提取油田儀表示數識別區域
針對預處理后的圖像進行示數自動識別時,需要先提取圖像內油田儀表示數所在區域,避免圖像背景信息干擾識別結果。文中采用了Faster-RCNN網絡結構[6],進行目標區域檢測。
在待識別油田儀表圖像中,通過特征金字塔網絡繪制候選框,選取目標識別區域。面對任意尺寸的油田儀表圖像,建立特征圖,并將其導入特征金字塔網絡,通過卷積運算得出目標識別區域檢測結果。為加強區域檢測的直觀性,Faster-RCNN網絡結構輸出的檢測結果,只會出現兩種情況,分別是前景區域和背景區域。應用Faster-RCNN算法進行卷積運算時,會出現多種損失情況,多任務損失函數為:
根據Faster-RCNN檢測結果,確定油田儀表示數識別區域,并將其單獨提取出來進行后續指針定位和示數識別。
1.3設計基于機器視覺的指針定位方法
油田儀表示數的識別需要以儀表刻度和指針方向為基礎。該研究為提升示數識別的準確度,運用機器視覺算法結合指針儀表的結構特點完成指針位置的定位。根據調查結果可知,油田儀表的指針根部與儀表圓心相重疊,而儀表的整體刻度區域分布形狀為環形。根據同心圓原理可確定油田儀表的起始刻度位置和量程。
想要得到更加精確的儀表圖像,還需進一步提取刻度盤的信息。在機器視覺算法中選擇霍夫檢測算法[7],觀察儀表的圓心和最外面的邊緣輪廓,截取儀表盤的刻度區域,再針對儀表圖像進行二值化處理和極坐標變換,獲取準確的刻度信息。其中,極坐標變換原理如圖1所示。
以此為基礎,進行儀表指針定位研究,考慮到儀表的指針是線型分布的,屬于比較容易識別的圖像內容。因此,文中在深入研究各種機器視覺算法后,采用霍夫直線檢測算法進行儀表指針的自動定位。前文基于機器視覺技術已經完成了圖像邊緣檢測,此時設置圖像邊緣存在眾多待檢測的邊緣點,并且每個邊緣點都可引出無數條直線。在霍夫變換空間中,遍歷每條直線,與指針識別圖像進行匹配,通過數值統計和分析,確定與識別出的指針圖像最接近的直線,并計算出直線內所有坐標點,綜合分析得出油田儀表指針定位結果。
1.4獲取油田儀表示數自動識別結果
由于油田儀表的刻度總是均勻分布的,所以可根據油田儀表指針定位結果,獲取其與最小刻度線之間夾角的角度,完成儀表示數的計算。首先,指針對應直線的斜率為:
通過上述計算,可得出油田儀表示數自動識別結果。
2實驗
2.1實驗設置
依托于機器視覺技術,完成油田儀表示數自動識別方法設計后,在Win?10?(64位)系統上應用該方法進行實驗測試,驗證所提識別方法的合理性和優越性。為保證實驗的順利進行,選擇16G?RAM的運行內存和Intel-I9系列的?CPU,搭建基本實驗環境。同時,應用python3.?52編程語言,按照文中研究內容構建儀表示數自動識別編碼框架。
本次實驗開始之前,在網絡上采集30張油田儀表原始圖像,并將所有圖像的尺寸統一設置為640×640大小,并通過labelme軟件對每張圖像進行編號,制作成實驗用數據集。
2.2油田儀表示數識別結果
文中提出運用Faster-RCNN網絡對原始圖像進行檢測,提取油田儀表示數區域。為保證網絡檢測結果更加準確,在實驗數據集中隨機抽選20張圖像,組成訓練集,對Faster-RCNN網絡進行訓練。以某一張圖像為例,應用訓練好的網絡對其進行檢測,得到目標識別區域提取結果,如圖2所示。
從圖2可看出,在Faster-RCNN網絡的作用下,準確提取了圖像中儀表所在區域,再依靠機器視覺算法對該區域進行指針定位和示數識別,確定讀數范圍均為0~1.6MPa,儀表編號1的示數值為0.45?MPa,編號為2的儀表示數值為0.00?MPa。綜上所述,應用文中提出方法可得到儀表示數,表明了本文研究內容具有可行性。
2.3識別性能分析
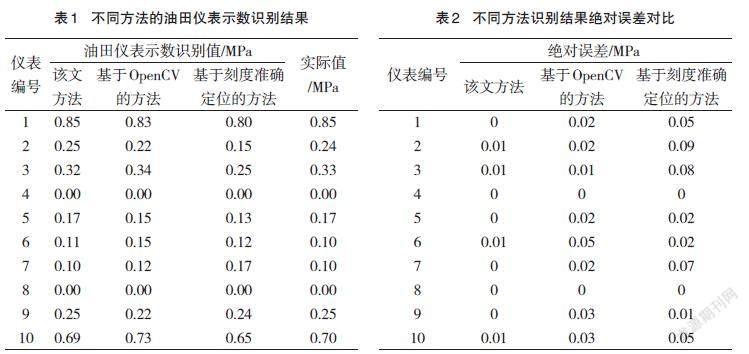
本次實驗過程中,應用所提方法對除訓練集外的10張圖像進行示數識別測試。同時,選擇基于OpenCV的方法和基于刻度準確定位的方法作為對比方法,同樣進行示數識別。根據記錄結果可知,三種方法的識別結果如表1所示。
根據表1可知,三種方法都可自動識別出儀表示數,但識別結果與實際值存在偏差。本次選用絕對誤差作為評價指標,針對表1所示的示數識別結果進一步計算,明確各識別方法的應用性能。
根據表2可知,文中設計方法的最大絕對誤差僅為0.01?MPa,甚至很多時候示數識別結果與實際值保持一致。而基于OpenCV的方法識別結果的最大絕對誤差為0.05MPa,基于刻度準確定位的方法的示數識別絕對誤差最大值達到了0.09MPa。三種方法對比可知,本文研究的自動識別方法,使得示數識別最大絕對誤差降低了80%、88.89%。
3結語
考慮到油田儀表示數識別的準確性要求,文中提出了以機器視覺算法為核心的自動識別方法。通過圖像預處理、識別區域提取、儀表指針定位、儀表示數識別等環節,得到最終示數識別結果。
參考文獻
[1]楊典,李小燕,劉培焱,等.基于OpenCV的變電站儀表識別方法研究[J].自動化與儀表,2022,37(4):75-80.
[2]王欣藝,景超,張浩宇,等.基于計算機視覺技術的指針式儀表智能識別方法[J].電子技術與軟件工程,2022(7):172-177.
[3]郭宇強,易映萍.變電站指針式儀表示數識別方法研究[J].軟件導刊,2022,21(3):62-66.
[4]胡鑫,歐陽華,尹洋,等.一種改進的指針式儀表示數識別方法[J].電子測量技術,2021,44(13):132-137.
[5]向友君,江文,阮榮鉅.基于刻度準確定位的指針式儀表示數識別方法[J].華南理工大學學報(自然科學版),2020,48(10):129-135.
[6]宋延衛,楊玉東,于悅,等.基于支持向量機的燃氣表示數識別[J].長春師范大學學報,2020,39(2):59-63.
[7]龔安,張洋,唐永紅.基于YOLOv3網絡的電能表示數識別方法[J].計算機系統應用,2020,29(1):196-202.
猜你喜歡
軟件導刊(2016年11期)2016-12-22 21:52:17
電腦知識與技術(2016年28期)2016-12-21 12:13:14
科技視界(2016年26期)2016-12-17 17:31:58
科技視界(2016年25期)2016-11-25 19:53:52
科技視界(2016年25期)2016-11-25 09:27:34
科教導刊(2016年25期)2016-11-15 17:53:37
軟件工程(2016年8期)2016-10-25 15:55:22
科技視界(2016年20期)2016-09-29 11:11:40
科技視界(2016年6期)2016-07-12 09:12:40
科技視界(2016年15期)2016-06-30 19:03:30
