基于MATLAB及STM32的雙足機器人步態規劃研究與實現
2023-04-07 02:25:28王宇洋
中國新技術新產品 2023年1期
朱 丹 王宇洋 陸 揚
(南京理工大學紫金學院,江蘇 南京 210023)
0 引言
雙足步行機器人與輪式機器人不同,在地勢較復雜的情況下,雙足步行機器人的靈活性更高,不僅具有更廣闊的應用場景,而且還可以更協調地完成任務。同時,其跨越多個學科,有深厚的研究基礎,因此雙足機器人發展速度極快[1]。該文通過建立雙足機器人的模型、列寫D-H 參數進行MATLAB 仿真,對雙足機器人的步態穩定性進行分析、算法調試,最終制造實物并對實物進行驗證。
1 雙足機器人系統的設計流程
設計目標是制造一個雙足步行機器人。首先,研究成年人身體的具體數據,找出合適的構建機器人腿的D-H 參數。其次,通過MATLAB 軟件的機器人工具箱建模,并為其規劃適合步行的軌跡并進行仿真,獲得合適的行走數據。最后,通過STM32 單片機設計系統的硬件電路,編寫相應的C 語言程序,使實物具備相應的功能。
2 雙足機器人系統的設計原理及仿真
從運動學的角度來看,機器人的腿更像是機械臂,對簡單的雙足機器人來說,2 個旋轉關節的串聯機械臂就可以滿足相關需求。但是要確定其D-H 參數也是一個很復雜的過程,要制造一個機器人,其尺寸最好與人的尺寸比例一致。通過研究靜態尺寸來研究人體構造尺寸及人體部分肢體長度。根據《中國成年人人體尺寸(GB 10000—1988)》的要求,具體計算和取值見表1[2]。

表1 機器人主要設計尺寸
3 雙足機器人模型建立及仿真
3.1 單腿構造
根據上文的數據、D-H 參數和機器人正運動學的相關理論內容構造1條機器人單腿。其模型如圖1 所示,列寫的D-H 參數見表2。

表2 機器人單腿的連桿參數
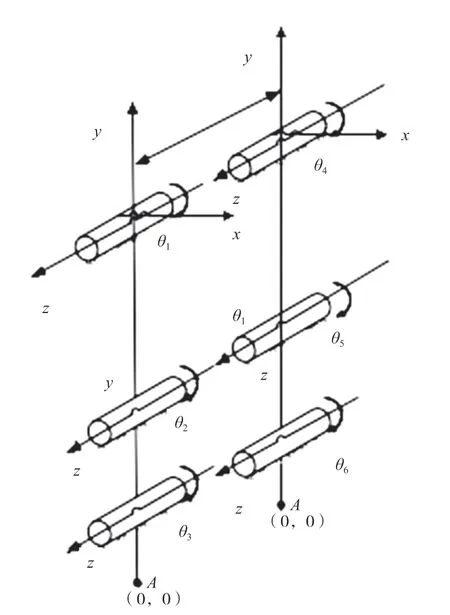
圖1 雙足機器人機構模型
3.2 單足運動
人體步行的姿態為2條腿交替前行,因此可以根據單足的運動分析推導雙足運動的規律。因為在笛卡爾空間的軌跡規劃要求大量逆解,換算到關節空間還有可能出現部分軌跡不在工作空間的情況,所以要在關節空間進行軌跡規劃。主要考慮步行過程中單腿的運動分為幾個狀態以及每個狀態的角度[3]。
首先,在關節空間中進行單腿路徑規劃,通過觀察人走路的情況可以分析人在行走時胯關節、膝關節和踝關節的運動情況。將機器人單腿行走的關節空間變化情況分為8 種狀態:1) 向前抬左腳。2) 左腳向前著地。3) 重心落在左腳,右腳微抬。4) 右腳抬起,兩腿平行。5) 向前抬右腳。6) 右腳向前著地。7) 重心落在右腳,左腳微抬。8) 左腳抬起,兩腿平行。用q1~q8分別表示8 種狀態的關節角度。其次,規定每個動作的持續時間,用100 Hz 的頻率對末端路徑軌跡坐標值進行采樣。最后,通過動畫觀察腿部運動,以驗證它是否按照一般行走的姿勢完成所有動作。
3.3 雙足運動
通過復制上文生成的串聯連桿對象(leg)就可以創建多條腿的機器人。但是需要提供不同的基座轉換,從而將腿連接到機體不同的點上,得到的結果是1 個包括多個串聯連桿(SerialLink)對象的向量[4]。
由于腿的軌跡是一個周期運動,因此可以通過使每個腿的運動軌跡有一個相位偏移來實現按順序復位的目標,該相位偏移時間為總循環周期的1/2。由于總周期有180 個點,因此每條腿的相移為90 個點。使用模運算來模擬每條腿的循環步態,其結果如圖2 所示[5]。
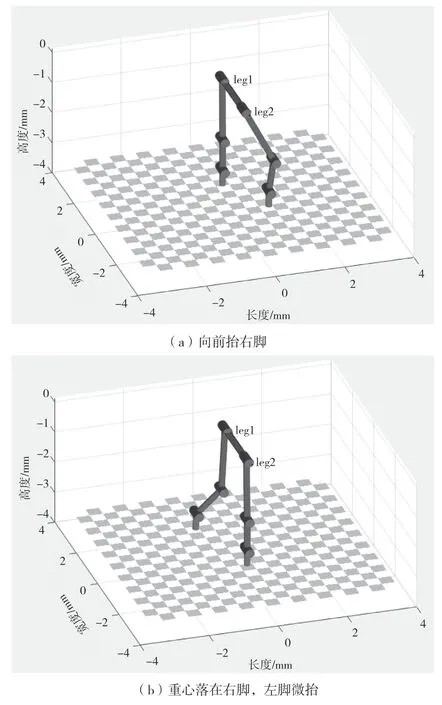
圖2 MATLAB 仿真雙足運動的2 個狀態
4 雙足機器人控制系統的硬件設計
在完成MATLAB 軟件仿真并獲得機器人雙足步行的關節變換的基本數據后,就可以設計基于STM32 的雙足機器人系統,將舵機運行的參數轉換成MATLAB 中仿真的數據。
4.1 雙足機器人的機械部分
雙足機器人系統中設計的機器人結構尺寸比例是將人體下半身按照比例縮放得到的,其核心部分是6 個轉動關節,分別為2 個髖關節、2 個膝關節和2 個踝關節。在制造前參考大量仿真試驗、人體下半身的主要數據以及國家標準,最終確定各個零部件的形狀,通過打孔、加工裝訂等工序,最終完成整個機器人的機械結構設計和裝配工作。
4.2 雙足機器人系統的控制電路設計
4.2.1 總體電路
雙足機器人的控制部分通過程序下載完成步態規劃,控制器穩定電壓供給(電源模塊為控制器和舵機提供穩定的電壓供給),通過LED 燈顯示機器處于不同狀態,蜂鳴器鳴響表示電壓過低(需要充電)。因此,根據上面的各種功能,電路主要由以下7 個部分組成,分別是主控芯片STM32F103RBT6、串口驅動模塊、顯示模塊、蜂鳴器模塊、按鍵模塊、FLASH 模塊和舵機系統。具體系統框圖如圖3 所示。
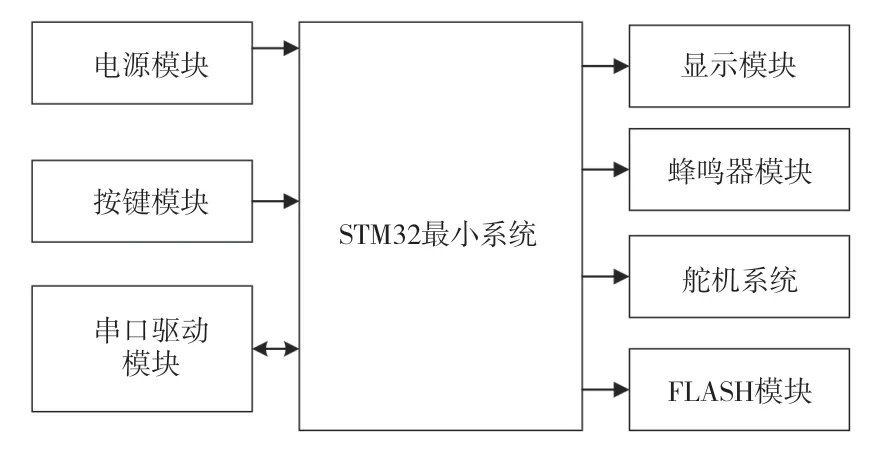
圖3 雙足機器人控制部分系統框圖
各部分的具體設計如下:1) 電源模塊。電源模塊主要由濾波電容、AMS1117-3 芯片構成。舵機系統和CPU 共用1 個電源,其供電電壓為5.0 V~8.4 V,電源的功率一般可以根據舵機數量自行搭配,例如當使用5~6 個舵機、使用15~16 個舵機時,所需要的額定電流是不同的,前者要達到3 A 及以上,而后者達到8 A 及以上。一般不是每個舵機都會同時工作,因此隨著舵機數量增加,電流的增長速度可以適當變慢。2) 串口驅動模塊。CPU 的額定電壓為3.3 V,而RS232 串口通信邏輯1 為-3 V~-15 V 的電壓;邏輯0 為3 V~15 V 的電壓。兩者是不匹配的,因此需要通過轉接芯片來完成兩者的電壓轉接工作,該轉換芯片就是CH340。通過串口驅動電路也可以下載程序,還可以實現控制器和PC 機的雙向通信。3) 顯示電路。顯示電路主要由2 個LED發光二極管構成。通過限流電阻接在CPU 的I/O 口上,從而顯示不同模式下的狀態。4) 蜂鳴器模塊。使用源的蜂鳴器通過三極管輸入電平就可以驅動鳴響。當電源電壓不符合要求時,啟動蜂鳴器,提醒用戶充電。5) 舵機系統。采用串行總線舵機,該控制系統可以控制6 個串口總線舵機,還可以控制髖、膝以及踝關節運動,使機器人完成各種動作。6) 按鍵模塊。通過按鍵可以控制當前機器人的模式運行。7) Flash 模塊。將機器人要執行的動作編寫成動作組程序存入Flash 中,開啟控制器后可以根據模式選擇執行動作組或者單獨動作。
4.2.2 舵機系統
該設計采用的舵機為串行總線數字舵機,型號為LX-824,控制板可以同時控制6 個串行總線舵機,在沒有使用彈性連接件和無線傳感器的條件下,舵機的控制效果良好。在使用舵機前要先用舵機調試控制板對舵機的偏差調零。
5 雙足機器人控制系統的軟件設計
將雙足機器人的硬件電路裝配好后,就編寫軟件程序,以控制雙足機器人運動。考慮7 種機器人的運動模式,分別為立正、前進、后退、左轉、右轉、向前翻滾以及向后翻滾。采集人體各個關節的動作數據,首先,進行MATLAB 仿真,通過動畫觀察雙足機器人的運動效果。其次,基于相關的數據編寫C 語言程序,以控制舵機完成各種運動,使其達到預定狀態。其主程序流程如圖4所示。該程序最核心的部分是控制單個舵機在一定時間內轉動一定角度,通過串口發送指令來完成任務,將MATLAB 中仿真的各個關節數據作為函數參數進行傳遞后,再根據ZMP 的步態規劃算法進行預判和調整。
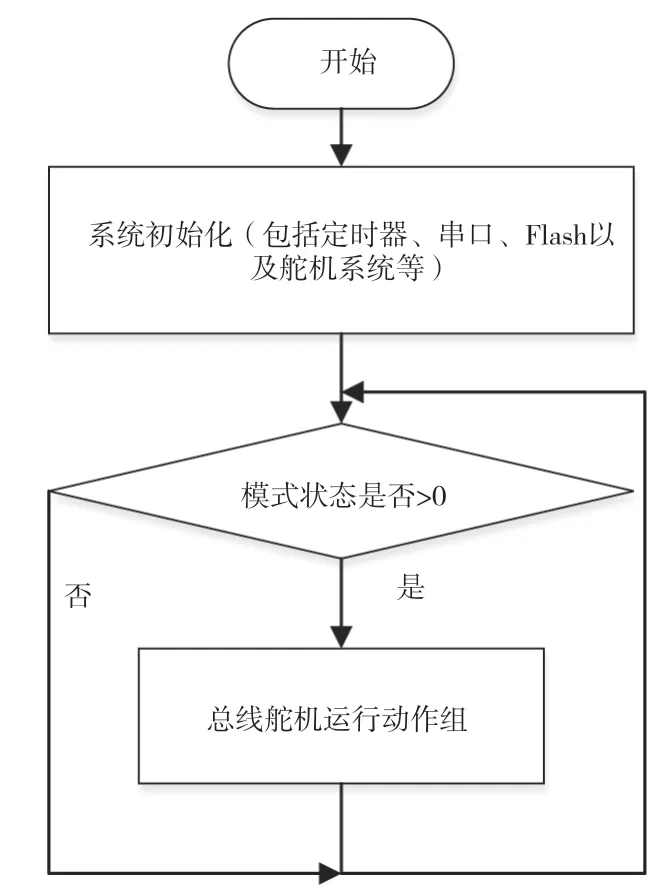
圖4 系統流程圖
6 系統調試
對機器人進行調試的方法分為2 個步驟:1) 在MATLAB軟件中獲取各動作的關節旋轉角度,將該數據輸入設計好的上位機界面的動作中,再將若干個動作組成動作組,從而完成一系列動作。2) 編寫基于STM32 的C 語言程序,以完成動作組脫機任務。在雙足機器人的運動過程中,采用基于ZMP 的步態規劃算法對機器人的步行軌跡進行預判,以保證機器人行走的穩定性。
以前進為例,分析從人體采集的運動數據和機器人運行數據的試驗結果。如圖5 所示,機器人和人體前進步伐一致。
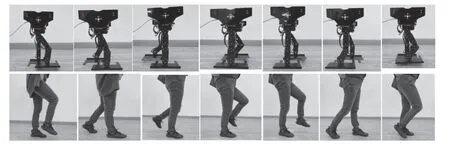
圖5 機器人和真人的步態對比
7 結語
首先,該文根據人體數據得出雙足機器人的D-H 參數,通過MATLAB 動畫仿真機器人的運動情況,以驗證數據的實用性。其次,設計、制造雙足機器人實體編寫相關程序,試驗結果驗證了該雙足機器人的正確性。在STM32 單片機的控制下結合多種模塊,實現了機器人前進、后退、前后翻滾、左右轉動以及模擬步態行走的一系列動作且各個動作相對穩定。盡管在行走的過程中機器人會發生偏移,但是在試驗和調試后,實現了機器人正常行走的目標。
猜你喜歡
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
海峽姐妹(2017年7期)2017-07-31 19:08:17
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
Coco薇(2017年5期)2017-06-05 08:53:16
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
