基于模糊PID算法的電動側開門控制器的設計
2023-04-01 07:46:54苗文博徐洋譚偉江松熊秋涵
汽車零部件 2023年3期
苗文博,徐洋,譚偉,江松,熊秋涵
1.重慶郵電大學自動化學院,重慶 400065;2.重慶利龍科技產業(集團)有限公司,重慶 400020
0 引言
近年來,隨著汽車工業的高速發展以及電子工業的快速進步,電子汽車智能化的程度成為現代衡量汽車水平的關鍵標準之一,汽車電子占整車制造成本比例逐年增加,并且未來的比例也會持續增加。
電動側開門(power hinge door,PHD)由超聲波雷達、有刷直流電機、霍爾傳感器等元器件組成,從而實現對車門動作的控制。PHD具有以下基本功能:智能防撞、智能防夾、車門調速。同時對不同的汽車停靠環境進行全面的考慮,如極端天氣、 狹小空間等,通過算法編寫實現PHD的基本功能在不同工況下仍正常運行,使得整個系統做到智能化的同時也能確保系統的安全與穩定性。總體而言,在車門控制模塊上集成更多的功能,開拓市場的空白,具有很大的研究意義與價值。
1 總體設計方案
采用ST公司的STM32F4系列芯片作為處理核心來開發汽車的電動側開門功能。因為該設計是基于有刷直流電機和霍爾傳感器組合的方式進行開發的,要實現防夾、堵轉、調速功能都離不開霍爾信號的檢測。在進行電機轉速檢測時,霍爾信號的異常變化、處理后的數值丟失都會直接影響電動側開門的功能實現。所以霍爾傳感器的信號采集檢測與處理十分重要。電動側開門示意如圖1所示。
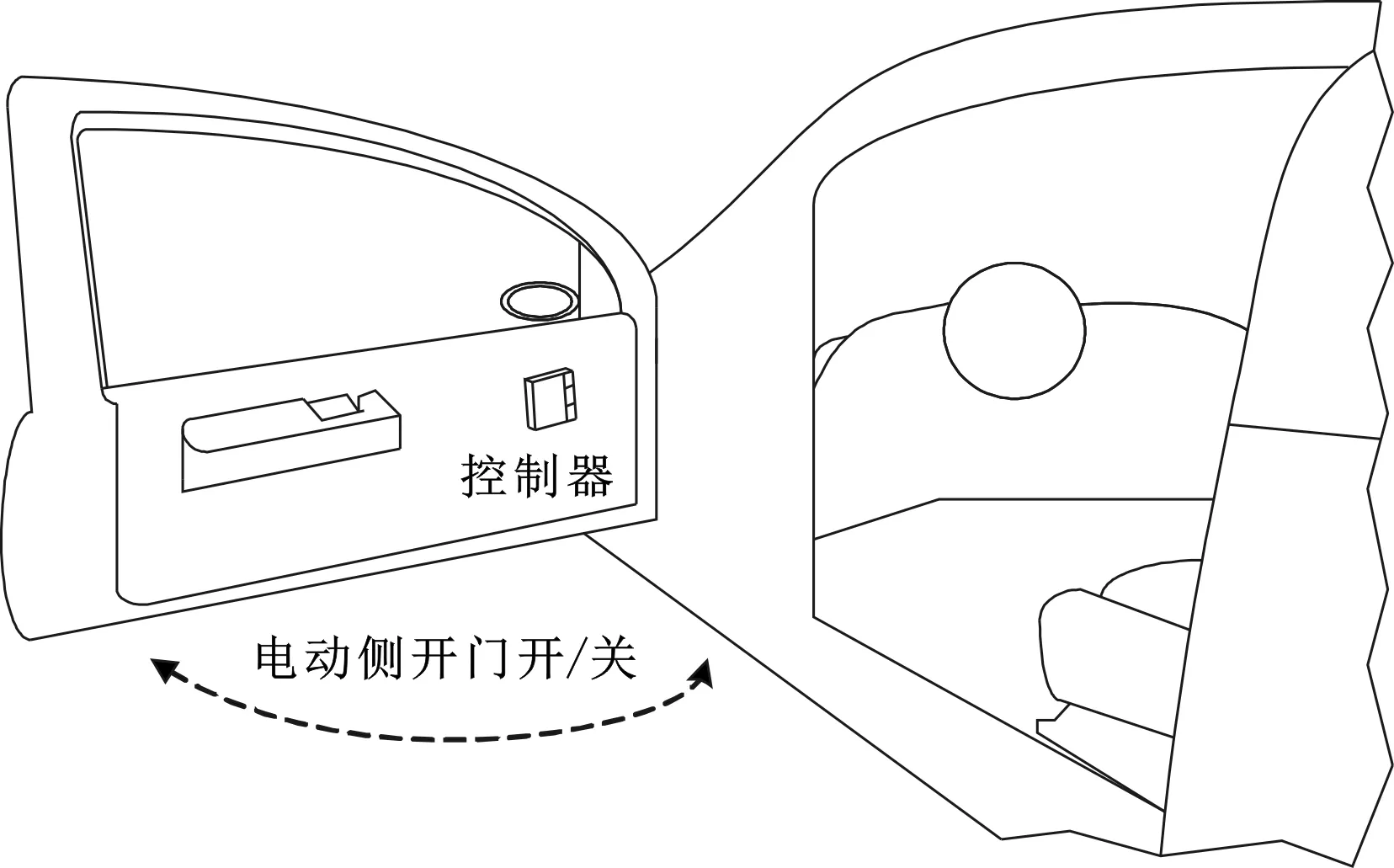
圖1 電動側開門示意
電機霍爾信號的采集檢測與處理主要分為軟件和硬件兩個部分。硬件部分主要負責電機霍爾信號的采集和信號放大、濾波等處理。軟件部分主要負責對采集到的霍爾信號進行轉速轉換,將霍爾信號與轉速實時聯系起來方便后期調速,同時計算采集到的霍爾信號數量從而得到當前車門的位置。
2 硬件設計
從適用性、穩定性和成本的角度考慮,在開發設計時盡量選用性價比高的元器件[1],在該車門設計上選用了ST公司的STM32F407芯片。通過車門開關的鎖信號和BCM接收到的CAN報文進行車門動作的策略處理。
MCU將會把檢測到的霍爾信號用于以下兩個部分的決策:一個通過計算霍爾信號的數量來獲取當前車門的實時位置;另一個通過模糊PID進行轉速的調節。兩個橫相結合一同實現電動側開門的防夾、堵轉和調速功能。PHD硬件設計架構如圖2所示。

圖2 PHD硬件設計架構
2.1 霍爾傳感器模塊
霍爾傳感器模塊輸出的霍爾信號處理電路如圖3所示,其由差分放大電路和濾波電路兩個部分構成。
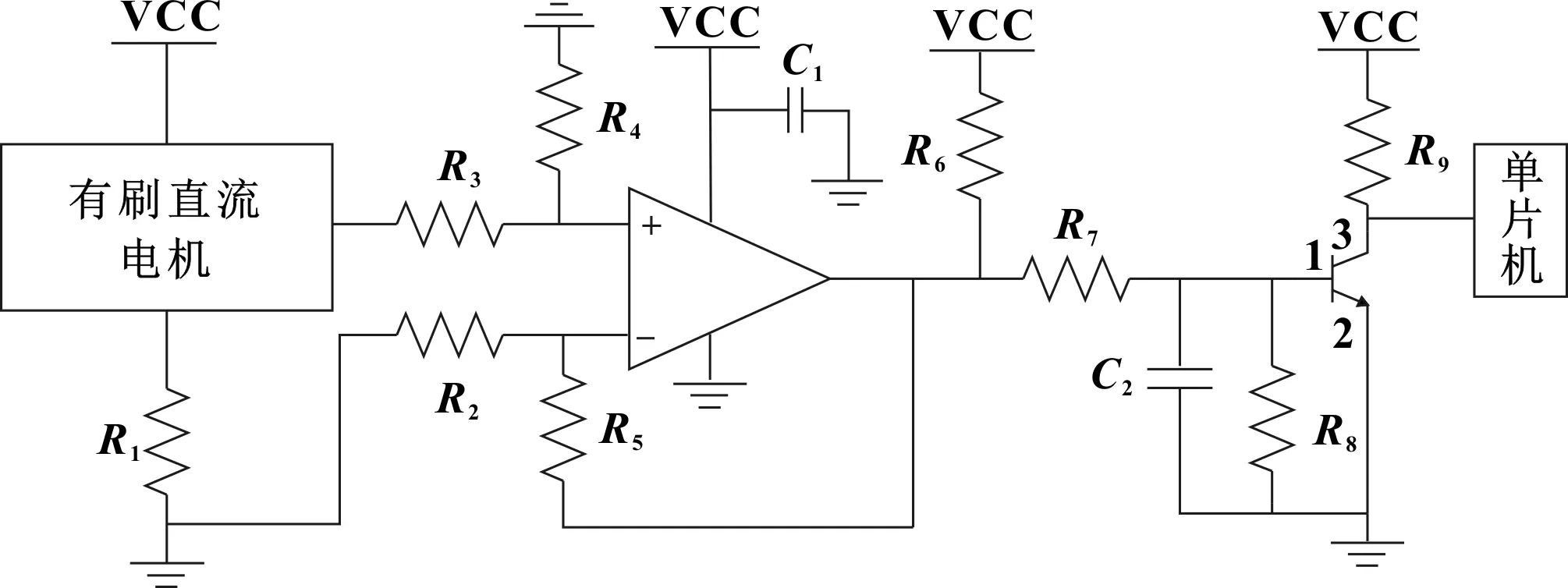
圖3 霍爾信號處理電路
在霍爾傳感器中霍爾電壓會隨著磁場的變大而減小,而霍爾電壓值通常很小,只有幾個毫伏,所以選擇用差分放大電路來放大霍爾傳感器的電壓信號。進行驅動時,濾波前霍爾信號會有許多毛刺,一般的RC濾波無法有效地濾除這些毛刺,所以選擇在RC濾波后加上一個NPN三極管來保證濾波的質量,三極管響應速度有最小寬度的要求,當信號小于最小脈寬要求時才能保證正常輸出而不失真。經過處理后將霍爾信號輸入給MCU進行算法處理。
2.2 雷達模塊
為了實現在開門時遇見障礙物自動停止,選擇在車門上安裝超聲波雷達模塊,超聲波雷達可以返回一個探測距離,但在同一發射波上的障礙物距離一樣時,無法確定具體的位置。如圖4所示,A、B兩處探測距離一致都為d,但通過單個雷達無法確定是在A處還是B處。所以在車門上合適距離安裝兩個雷達模塊,當兩個雷達共同探測到障礙物時即刻停止車門運動,如圖5所示。此方案可以有效減少環境干擾,同時能夠確定20~40 cm范圍內障礙物的位置。
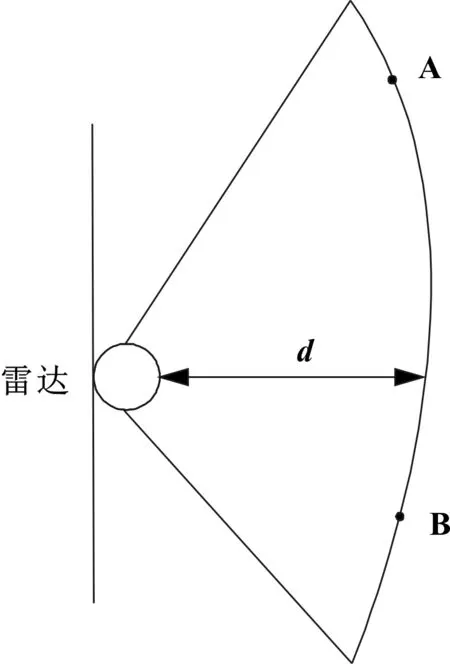
圖4 雷達檢測
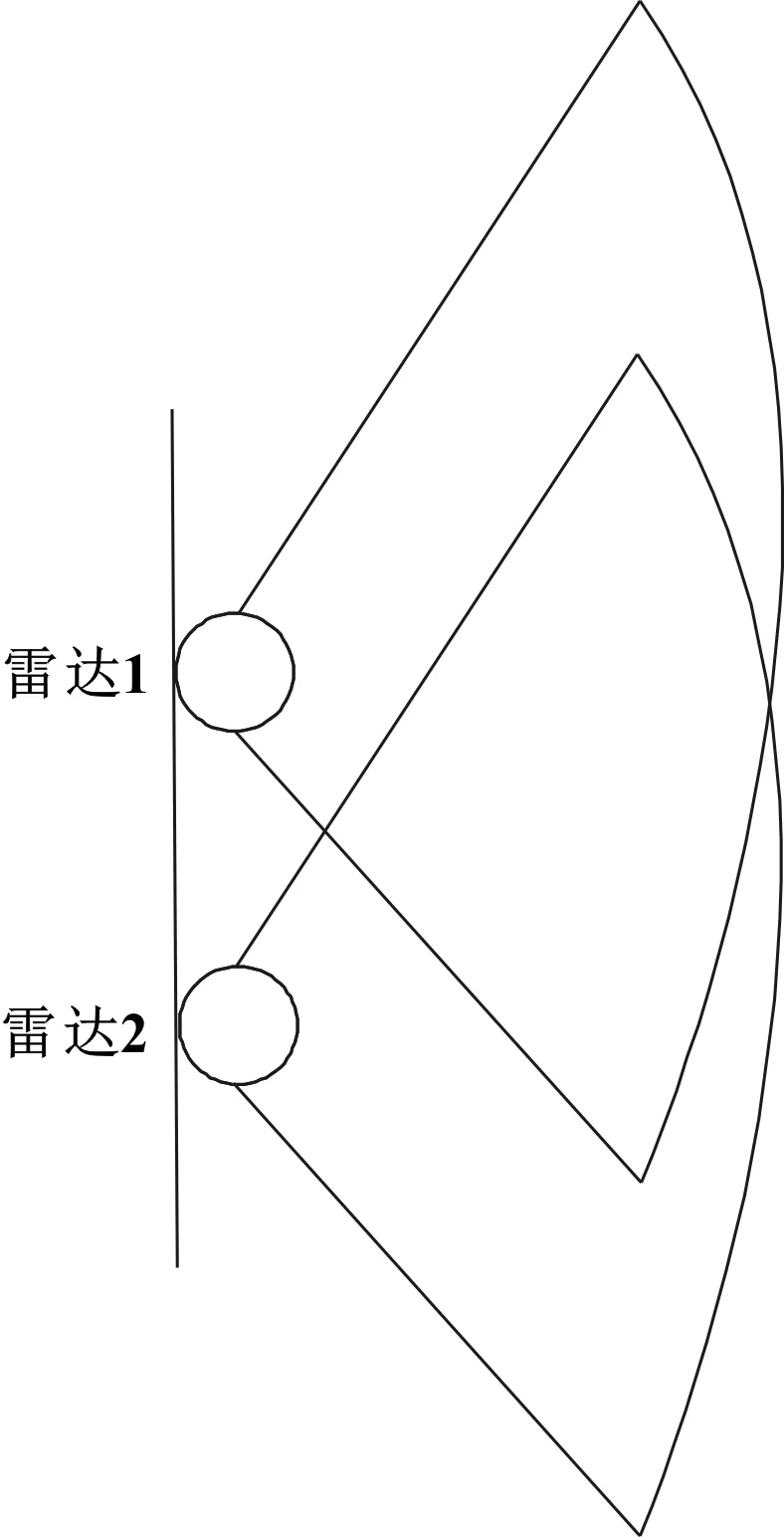
圖5 雷達安裝
3 軟件設計
系統的軟件設計主要分為主程序和子程序兩個部分,主程序主要完成任務的調度分配;子程序主要由系統初始化代碼、功能代碼(防夾、調速)、中斷服務等構成。
軟件的設計流程為:先判斷BCM是否發出鎖信號,若鎖信號發出則驅動電機運動同時進行模糊PID調速;再由霍爾傳感器讀取當前霍爾信號來判斷電機轉速是否達到目標設定值,若未達到目標值則繼續進行調速;在運動過程中通過霍爾脈沖計數來判斷車門是否運動到規定位置,同時開啟雷達檢測,若雷達檢測到了障礙物則會停止運動,如果未檢測到雷達信號而霍爾信號達到了防夾閾值則開啟防夾功能。軟件設計流程如圖6所示。

圖6 軟件設計流程
3.1 車門防夾算法設計
電動側開門防夾功能的實現需要確定兩個核心問題:一是車門位置的精確判斷;二是夾物力的判斷。
采用的霍爾電機具有兩根信號線,分別是霍爾速度信號線和霍爾方向信號線。當霍爾電機運行,正轉霍爾信號會產生一個高電平,反轉會產生一個低電平,以此來判定當前電機的運轉方向;同時根據不同速度霍爾電機速度信號線產生的霍爾脈寬也不同,速度越快脈寬越窄。
根據車門電機不同的轉速,相應的霍爾傳感器采集到的脈寬也不同,本文采用霍爾脈沖速度差檢測法。霍爾傳感器會在電機旋轉后輸出脈沖信號,脈沖的寬度為電機旋轉特定角度所經過的時間,一旦發生夾持,電機轉速下降,脈沖寬度增大[2],繼而實現電機運動狀態的判斷。經測試電機正常運行時的霍爾脈沖波形如圖7所示,電機堵轉時的脈沖波形如圖8所示。
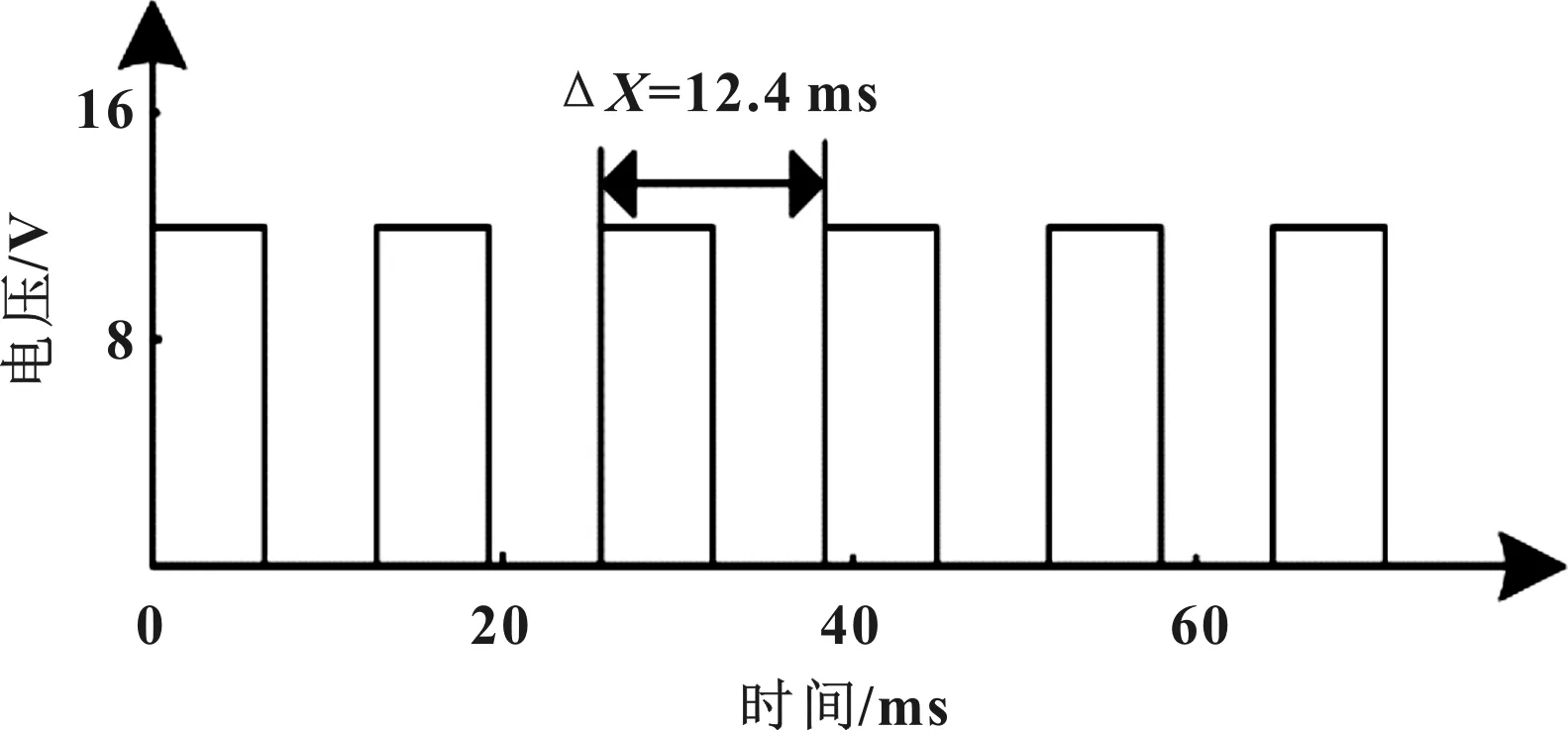
圖7 電機正常運行時的霍爾脈沖波形

圖8 電機堵轉時的脈沖波形
通過這兩個同時間基準下不同情況的霍爾脈沖波形可知,遇見障礙物時電機電流增大,對應的霍爾脈寬也就變寬[3],相應的電機轉速也就降低。所以可以根據霍爾脈沖寬度信息來判斷所受到的阻力是否達到閾值,就可以依此設計算法判斷是否開啟防夾功能。
3.2 模糊PID調速算法設計
由于常規PID控制在實際應用中較差,在本設計中使用模糊PID控制器對電機進行調速,主要分為模糊推理塊和PID調節模塊部分。模糊推理塊以霍爾電機的霍爾脈寬偏差e和偏差的變化率ec作為輸入[4],輸出變量分別為PID控制器的修正量ΔKp、ΔKi、ΔKd。
所用的離散PID控制算法為:
(1)
設定輸入ec、Δec和輸出變量的模糊子集為{NB、NM、NS、Z、PS、PM、PB},對應含義為{負大,負中,負小,零,正小,正中,正大};再設定每個變量的隸屬度函數[5]。模糊PID規則見表1。
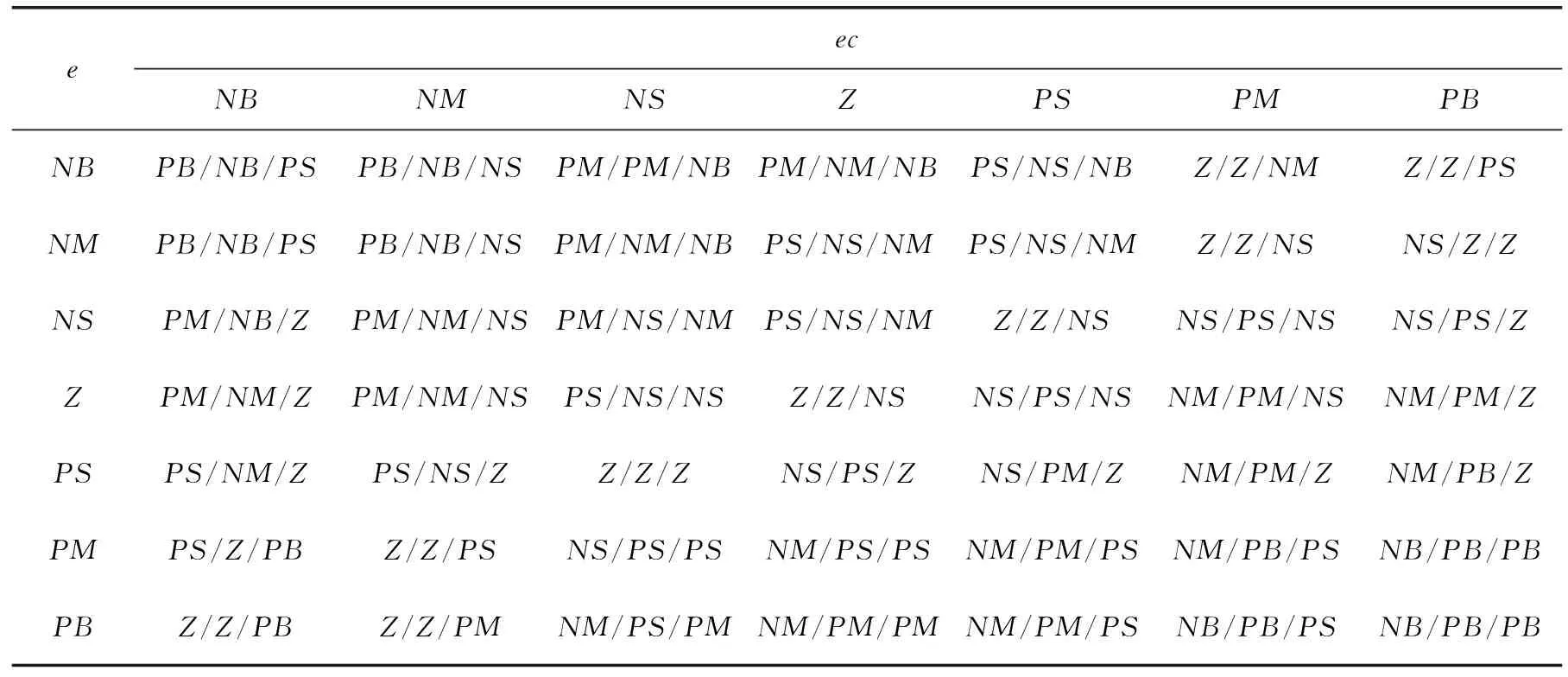
表1 模糊PID規則
在去模糊部分選擇常用的重心法,計算公式為:
(2)
式中:z0為模糊控制器輸出量接模糊后的精確值;zi為模糊控制量論域內的值;μc(zi)為zi的隸屬值。
在線性運行過程中,控制系統通過對模糊邏輯規則的結果處理、查表和運算,完成對PID參數的在線自校正,其工作流程如圖9所示。
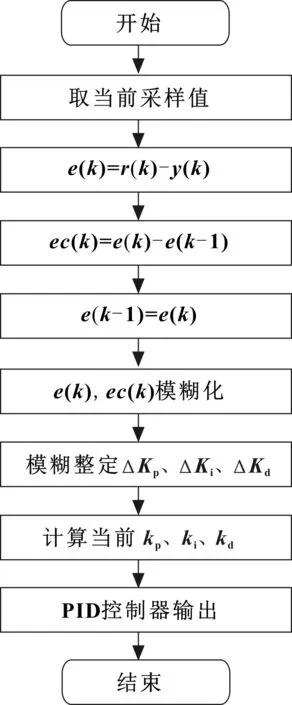
圖9 模糊PID工作流程
4 系統測試與驗證
本次設計是在實車上進行測試的,通過把設計好的控制器安裝車門內側的指定位置來控制整個系統的正常運行[5]。通過CANOE和外接的按鍵來發送數字信號和模擬信號給控制器進行開關門信號的發送。
將電動側開門的防夾算法用于實車上進行壓力檢測,在車門關閉的過程中只有進入防夾檢測區域才會開啟防夾功能[6-8]。在受到阻力時電機轉速下降,霍爾脈寬增大,當脈寬值達到設定閾值(防夾力為70N)后,系統將進行反轉,如圖10所示。
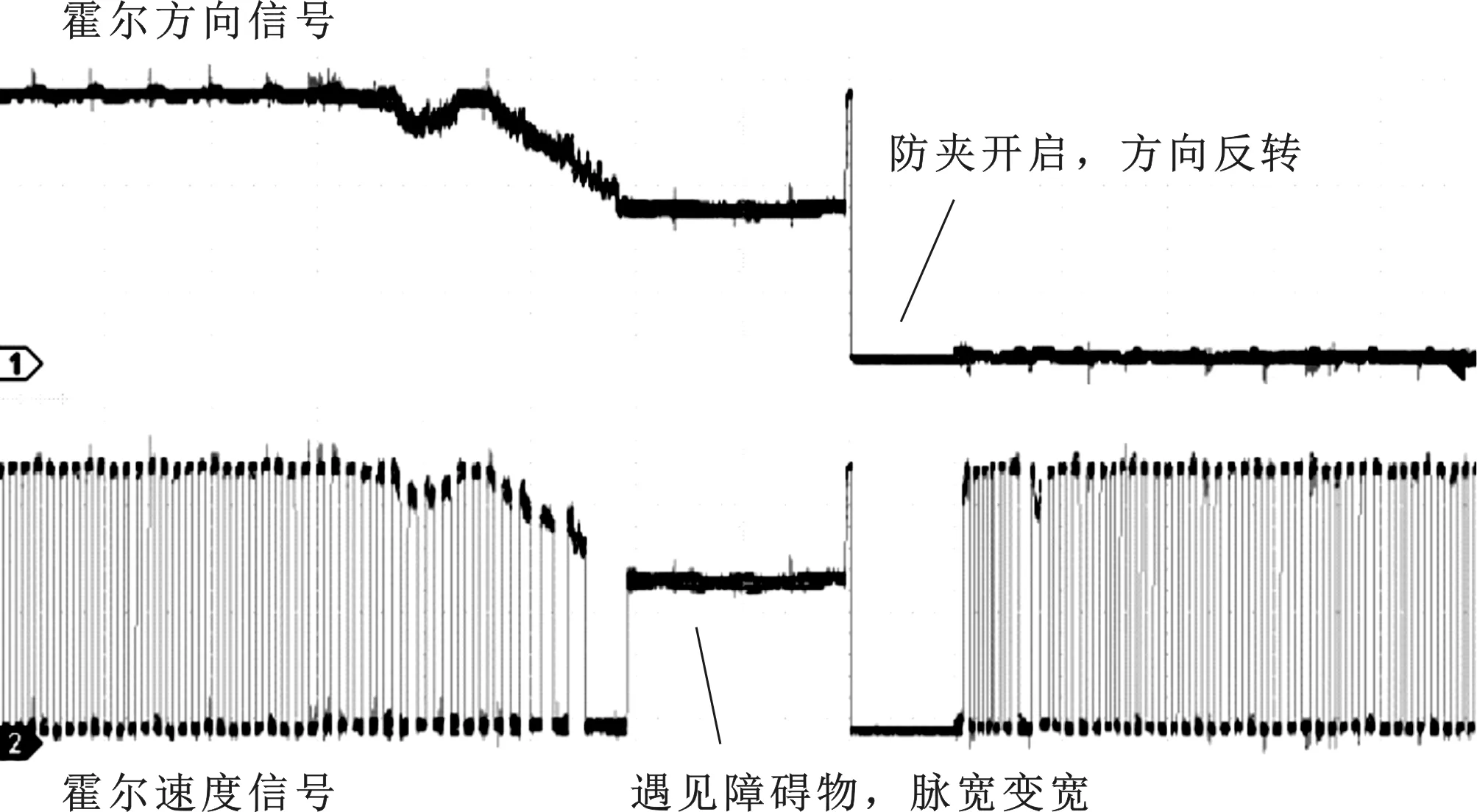
圖10 車門防夾反轉時霍爾脈寬的變化
在多次測試后,電動側開門防夾成功率在99%以上,并記錄了3個不同的防夾力測試點,每個測試點記錄5組數據,其防夾力變化見表2。
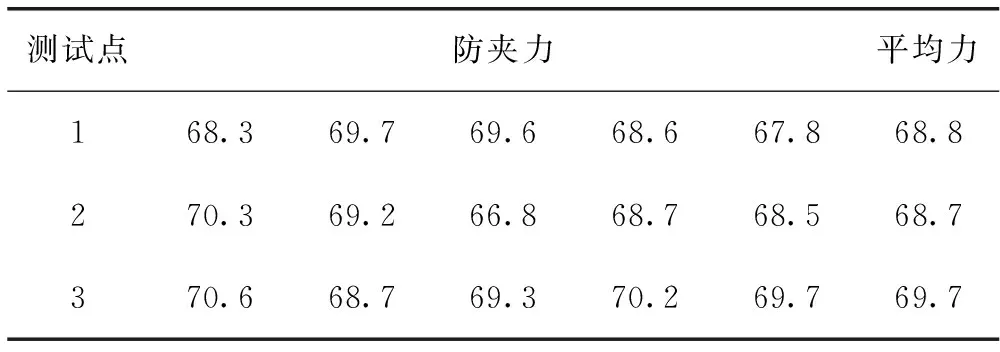
表2 電動側開門防夾時防夾力變化 單位:N
從表2數據可以看出,在車門的不同點進行車門防夾時,防夾力基本在70N以下變化,滿足設計要求。
利用Freemaster軟件對車門控制系統進行霍爾脈寬實時檢測,觀察模糊PID調速情況,如圖11所示。
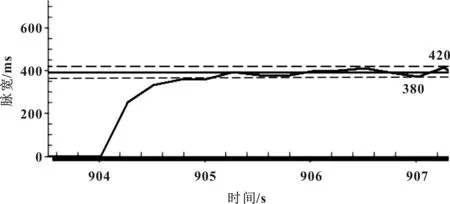
圖11 模糊PID調速
可以看出系統的振幅誤差在5%以內,基本完成調速且速度變化穩定在設計要求范圍內。
5 結束語
經過對電機的霍爾脈寬檢測,設計了一款具有多功能的電動側開門控制系統,該系統具有防夾、調速、雷達檢測等功能,且經過多次試驗測試,該設計滿足防夾力普遍小于70N、車門開關速度穩定、雷達在20~40cm實現障礙檢測的設計要求,系統達到了穩定、可靠、智能化控制的目的。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
海峽科技與產業(2016年3期)2016-05-17 04:32:12
