模塊化移動機器人底盤實驗平臺研發(fā)與應用
2023-03-27 06:34:28劉相權張萬杰
科技創(chuàng)新與應用 2023年8期
劉相權,張萬杰
(1.北京信息科技大學 機電工程學院,北京 100192;2.北京六部工坊科技有限公司,北京 102308)
機器人技術基礎課程中包括串聯(lián)機器人、并聯(lián)機器人和移動機器人的教學內(nèi)容,其中運動學分析是各種類型機器人的主要教學內(nèi)容。為滿足機器人技術基礎課程的教學需要,開發(fā)了該模塊化移動機器人底盤實驗平臺[1-2]。
1 移動機器人底盤實驗平臺模塊化結(jié)構設計
移動機器人底盤實驗平臺采用模塊化設計,如圖1、圖2 所示,包括1 個四輪底盤、1 個三輪全向底盤、4個伺服電機、1 個鋰電池、4 個麥克納姆輪、4 個橡膠輪、3 個全向輪、1 個控制器、8 個紅外測距傳感器和6個灰度傳感器。

圖1 四輪底盤實驗平臺

圖2 三輪底盤實驗平臺
各模塊之間采用磁力拼裝接口設計,裝配時,無需螺絲,瞬間固定。拆卸時,只需定向稍加外力,即可解鎖。這樣就減少了螺絲的拆裝時間,在有限時間內(nèi)可以對底盤構型進行快速迭代。
1.1 伺服電機模塊
移動機器人底盤實驗平臺主要動力源為伺服電機模塊。伺服電機模塊采用進口直流電機,電機額定功率20 W,光電編碼器閉環(huán)控制,在有效負載內(nèi)能夠保持勻速運動。
如圖3 所示,移動機器人底盤配備4 個伺服電機模塊,電機模塊供電接口和通訊接口集成在1 個航插接口。電機模塊使用RS485 總線通訊,理論上可以掛載上百個執(zhí)行單元。電機模塊提供2 個航插接口供多個模塊總線級聯(lián),并配置1 個雙色LED 指示通訊狀態(tài)。
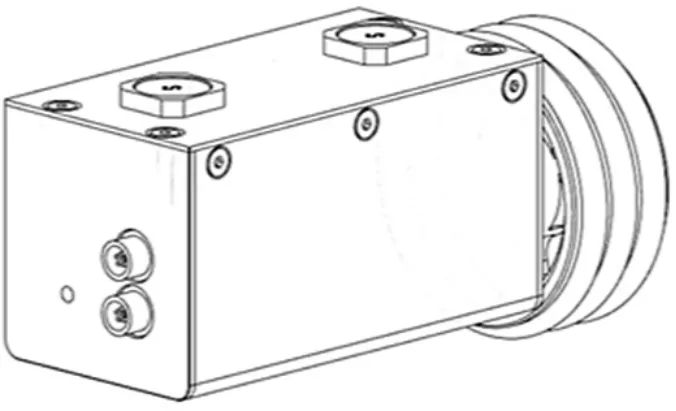
圖3 伺服電機模塊
1.2 電池模塊
移動機器人底盤實驗平臺配備了1 個24 V DC+3.5 Ah 的鋰電池模塊,如圖4 所示。整個系統(tǒng)工作從電池模塊取電。
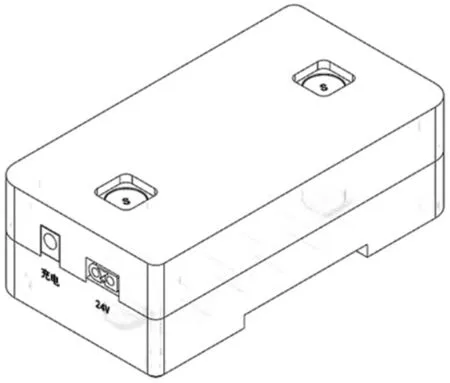
圖4 電池模塊
1.3 控制器模塊
移動機器人底盤實驗平臺中的控制器功能高度集成,具有4 路IO 輸入、8 路IO 輸出并配合LED 指示燈狀態(tài)顯示,15 路12 位精度的ADC 接口,4 路頻率和占空比可調(diào)的PWM 信號輸出接口,所有以上接口均布置在控制器面板,如圖5 所示,使用者操作起來一目了然。控制器側(cè)面布置有USB 轉(zhuǎn)UART 接口,可以通過1根數(shù)據(jù)線實現(xiàn)與上位機通訊,另外控制器的RS485 總線接口集成在控制器另一側(cè)面的2 個航插上,用于連接伺服電機模塊。
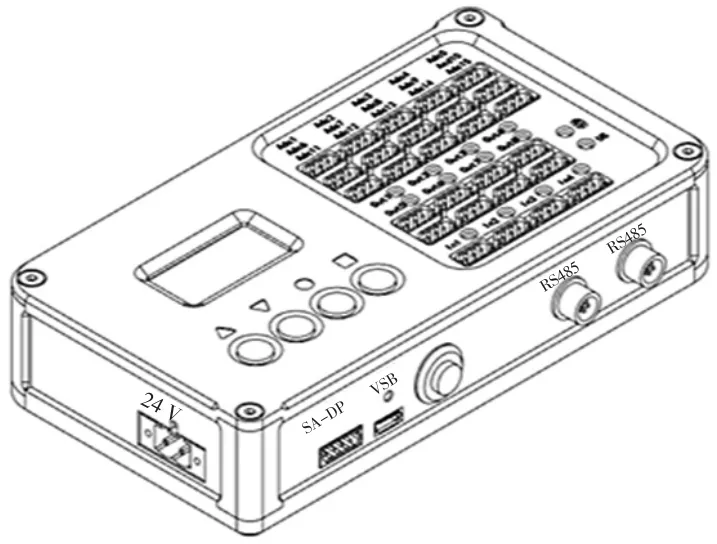
圖5 控制器
控制器使用Keil uVision4 編譯環(huán)境,目前已為控制器編寫了功能完善的服務程序模板,并將所有功能函數(shù)做了封裝,提供方便調(diào)用的API 接口,并針對所有功能都有對應的Demo 程序,使初學者也能夠很快地上手。如果熟悉C 語言,就可以直接調(diào)用這些函數(shù)接口編寫程序,不用費心編寫調(diào)試單片機底層程序,將注意力放在機器人上層控制算法上。
移動機器人實驗平臺提供2 種底盤和多種型號輪子。可以通過組合伺服電機、電池、控制器、不同底盤和不同輪子實現(xiàn)四輪差動、三輪全向及四麥克納姆輪全向平臺,如圖6—圖8 所示[3]。
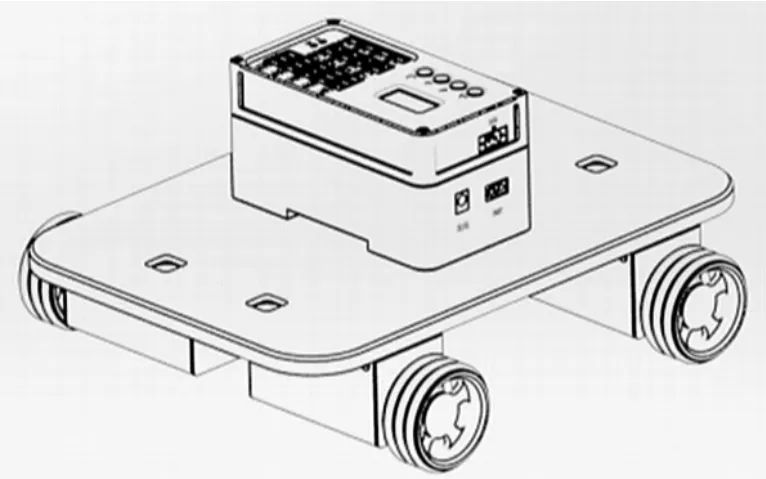
圖6 四輪差動底盤
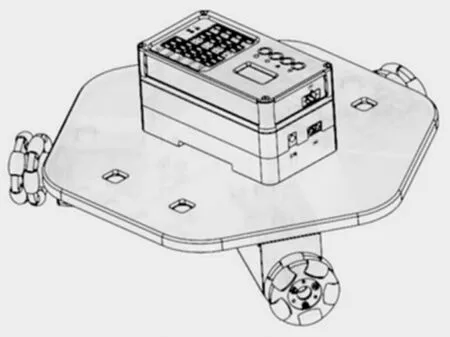
圖7 三輪全向底盤
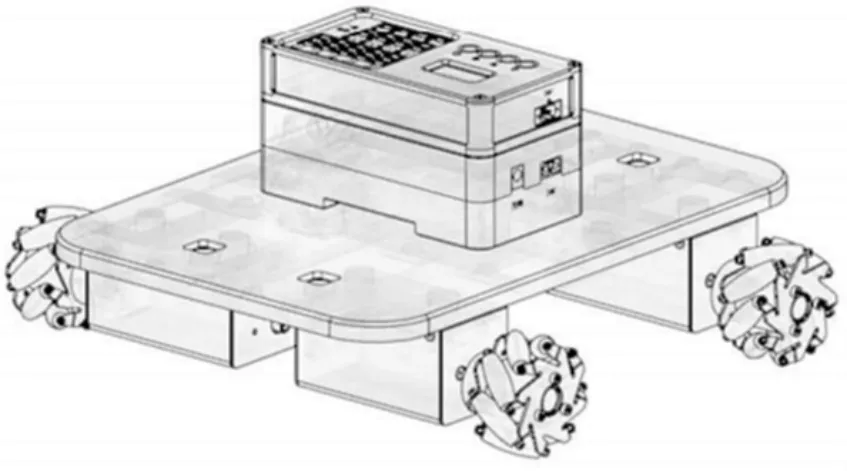
圖8 四麥克納姆輪全向底盤
依托上述移動機器人底盤實驗平臺,可以開設若干實驗,見表1。
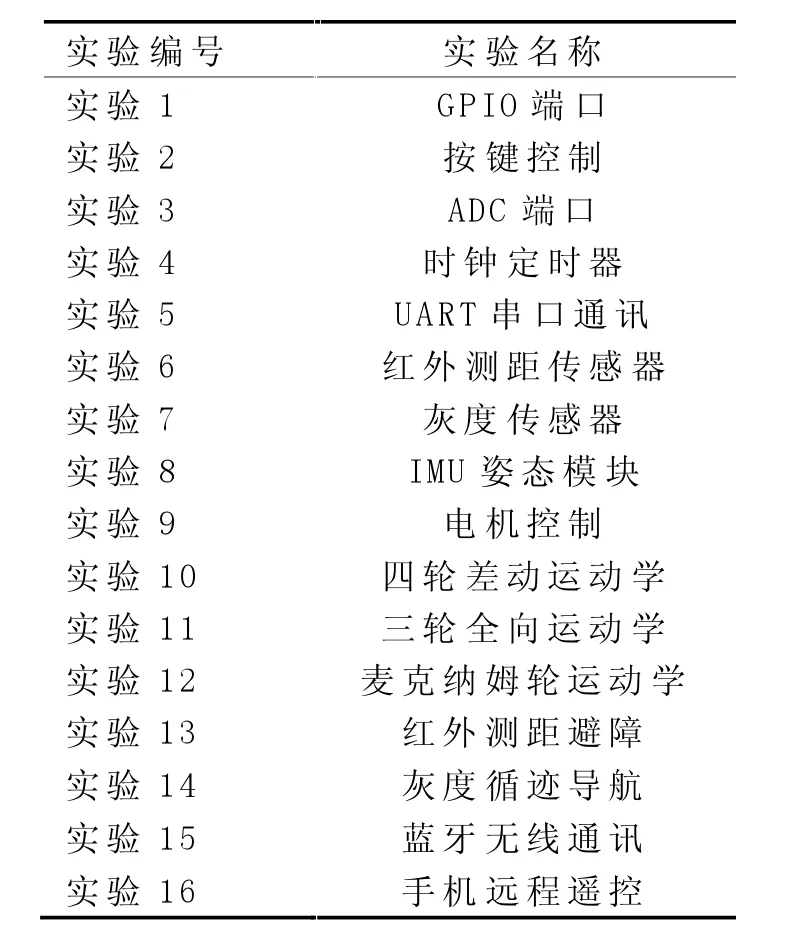
表1 實驗名稱
下面以實驗12 為例,對麥克納姆輪全向底盤進行運動學分析,并在此基礎上編程實現(xiàn)運動控制。
2 麥克納姆輪全向底盤運動學分析
如圖8 所示,麥克納姆輪全向底盤是由4 個獨立的麥克納姆輪驅(qū)動單元呈四邊形排布在底盤上,每個麥克納姆輪的輪面上排布了一系列的小輪轂,小輪轂的輪軸與主輪軸的角度為45°。通過這4 個麥克納姆輪的協(xié)作配合能夠?qū)崿F(xiàn)360°全方向移動和旋轉(zhuǎn),其中全方向移動又可以分解成平面二維方向上的速度矢量,所有的運動狀態(tài)都可以看成這幾種運動模式的復合狀態(tài)。下面分析這幾種模式的運動學逆解,從預期進行的運動狀態(tài)去推算每個電機應該輸出的轉(zhuǎn)速[4]。
分析過程中,以機器人的正前方為X 軸正方向,機器人的左側(cè)方向為 Y 軸,機器人的正上方為Z軸,旋轉(zhuǎn)方向遵循右手定則。
為了便于描述輪子在地面接觸點產(chǎn)生的速度,如圖9 所示,本節(jié)中的所有速度分析圖都是從下方面向車體底部的視角去分析。
圖9 速度分析視角
2.1 水平X 軸、Y 軸方向移動
麥克納姆輪全向底盤在水平X 軸方向上的移動又分為前進和回退。這2 種模式只是速度方向不同,本質(zhì)是一樣的,這里僅以前進狀態(tài)為例進行分析。
首先,分析單個輪子。
如圖10 所示,左圖是麥克納姆輪側(cè)視圖,主要體現(xiàn)主輪速度關系;右圖為麥克納姆輪的俯視圖,主要體現(xiàn)小輪轂對地產(chǎn)生速度與主輪速度的關系。
圖10 中的變量定義見表2。
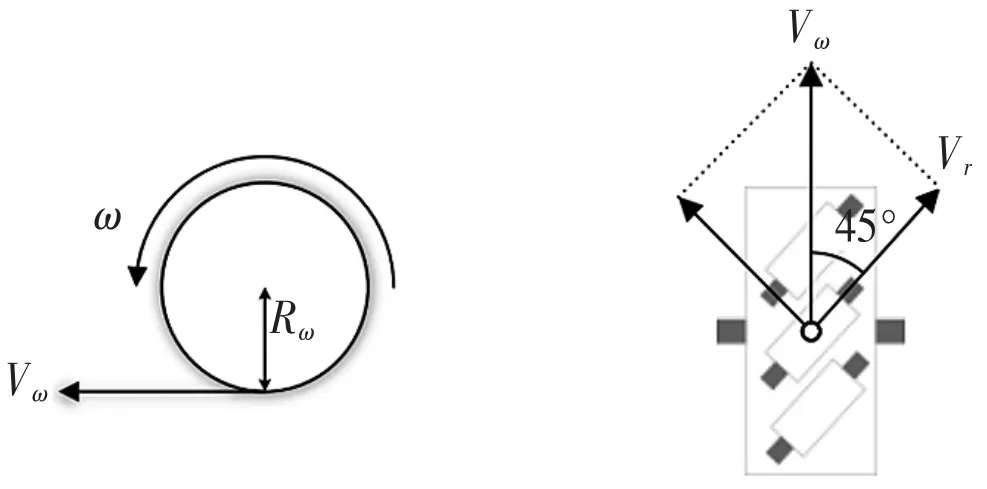
圖10 單個輪子的運動分析
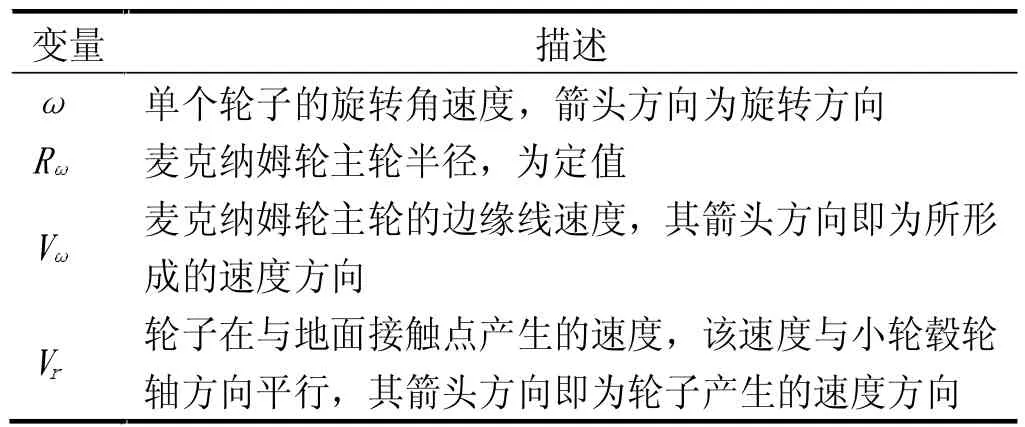
表2 單個輪子的變量定義
從圖10 中可以得出關系式
前進時的運動模型圖如圖11 所示。
圖11 中的變量定義見表3。
表3 X 方向移動時變量定義
從圖11 中可以得出關系式
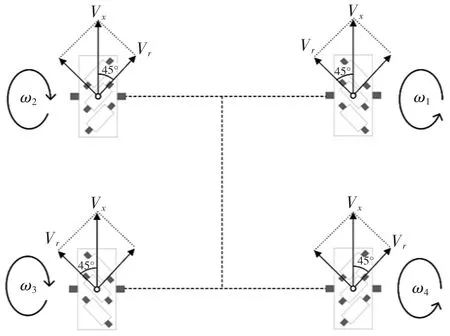
圖11 X 方向移動時的運動模型
νr=νx×cos45° 。
聯(lián)立前面單個輪子的關系式
可以推出關系
根據(jù)前進運動的模型分析圖中的速度方向。可以得出麥克納姆輪全向底盤在水平X 軸方向移動時4個輪子的轉(zhuǎn)速關系
同理,可以得出麥克納姆輪全向底盤在水平Y(jié) 軸方向移動時4 個輪子的轉(zhuǎn)速關系
2.2 旋轉(zhuǎn)運動
麥克納姆輪底盤的旋轉(zhuǎn)模式又分為順時針和逆時針,這2 種模式只是速度方向不同,本質(zhì)是一樣的,這里僅以機器人逆時針狀態(tài)為例進行分析。需要注意的是,機器人逆時針旋轉(zhuǎn),從底盤下方看上去是順時針旋轉(zhuǎn)。模型分析如圖12 所示。
圖12 中的變量定義見表4。
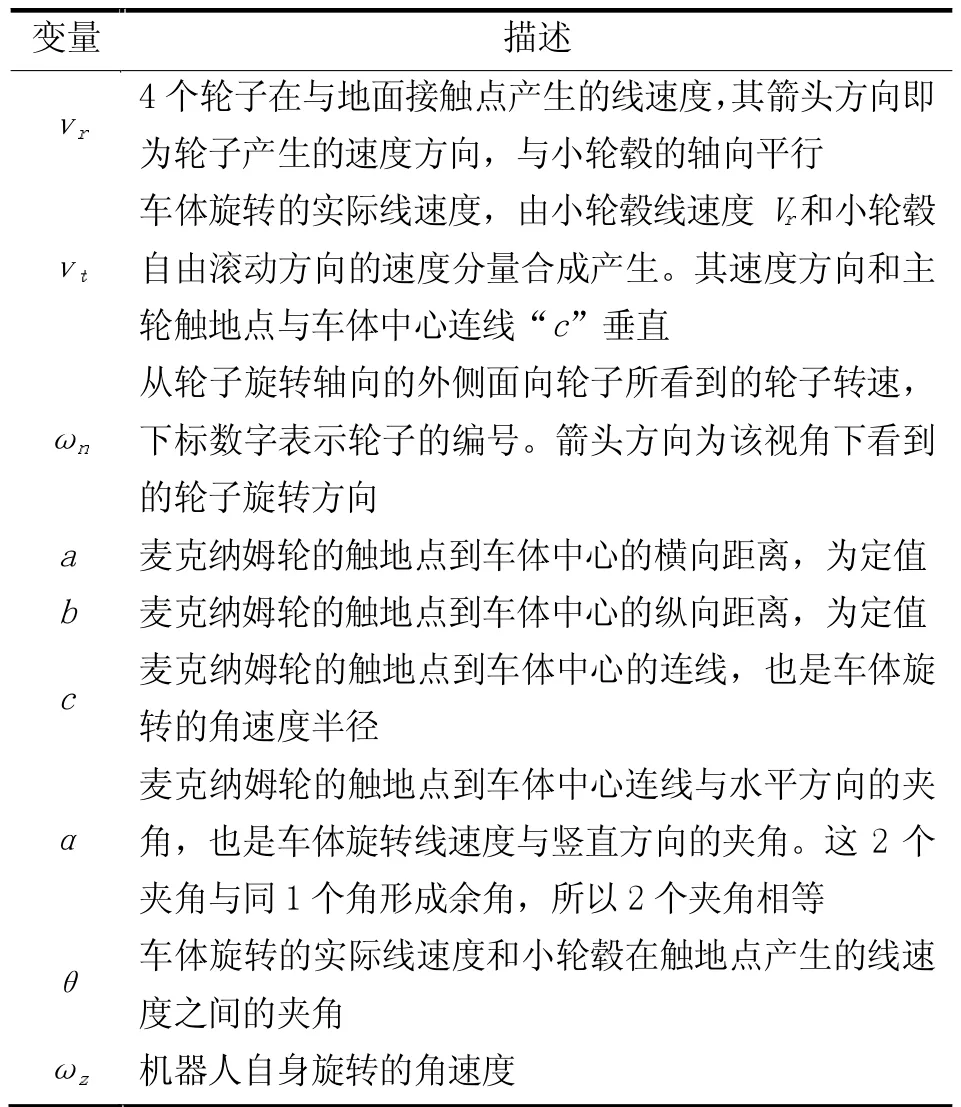
表4 旋轉(zhuǎn)時的變景定義
由圖12 可得知關系
圖12 旋轉(zhuǎn)時的運動模型
為方便計算,先將cos 展開
將這個展開式代入原來的等式
由之前單個麥克納姆輪的速度解析,有
將其代入剛才的關系式
考慮輪子的轉(zhuǎn)動方向,可以推出4 個輪子的轉(zhuǎn)速關系
2.3 復合運動
前面提到過,麥克納姆輪全向底盤所有的運動狀態(tài)都可以看成上述3 種運動模式的復合狀態(tài),所以最后4個輪子的轉(zhuǎn)速的關系式即為上述運動模式的速度和
式中:只有νx、νy和ωz是未知數(shù),其他都是已知。由此實現(xiàn)了依據(jù)指定的νx、νy和ωz來解算4 個輪子的轉(zhuǎn)速。
3 實驗測試
下面通過實驗來驗證公式(1)的正確性,實驗的內(nèi)容是讓機器人按照0.1 m/s 的速度向前直行10 s,查看其是否走了1 m 距離。其他運動模式的實驗可以在這個例子上進行擴展。編寫的main.c 文件源代碼如下[5-6]:
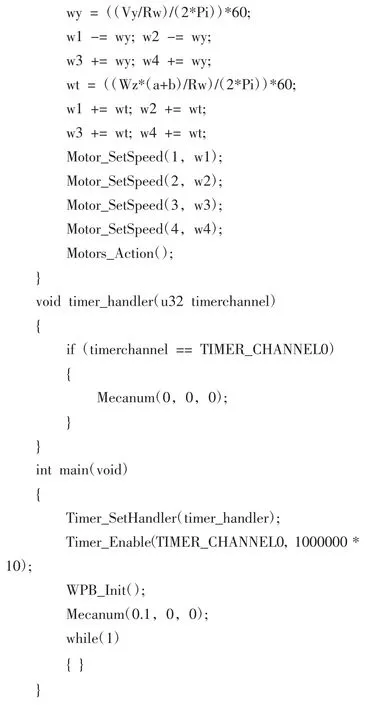
將機器人底盤實驗平臺放置到地上,在平臺前側(cè)邊緣投影的地面上畫1 條標記線作為起點。打開控制器的電源,稍等片刻,機器人開始向前移動。計時10 s后,機器人會停止。此時再在平臺前側(cè)邊緣投影的地面上畫1 條標記線作為終點。經(jīng)測量,機器人移動的起點和終點距離在1 m 左右。
如 果 將Mecanum (0.1,0,0) 替 換 為Mecanum(0,0.1,0),每次上電,機器人都會側(cè)1 m 左右。如果將Mecanum(0,0.1,0)替換為Mecanum(0,0,(2*Pi)/10),每次上電,機器人都會原地旋轉(zhuǎn)1 周左右。
4 結(jié)束語
根據(jù)機器人技術基礎課程的實驗需求,本文設計開發(fā)了采用磁鐵吸合的可快速拆裝的模塊化移動機器人底盤實驗平臺,并通過對四麥克納姆輪全向底盤運動學分析和實驗測試驗證了實驗平臺的可行性、可靠性。
基于該實驗平臺,學生可以進行多項實驗,一方面可以增加學生的學習興趣,提高學生的綜合設計能力和創(chuàng)新實踐能力;另一方面為學生今后參加創(chuàng)新實踐項目和學科競賽打下堅實基礎。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
中學生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
制造技術與機床(2017年3期)2017-06-23 08:11:21
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
智能系統(tǒng)學報(2015年4期)2015-12-27 09:38:35
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
