深海采礦旁靠外輸雙船耦合動力響應(yīng)分析
2023-03-21 11:26:00馮士倫陳澤宇唐友剛
海洋技術(shù)學(xué)報 2023年5期
關(guān)鍵詞:護舷
馮士倫,陳澤宇,李 焱,唐友剛
(1.天津大學(xué)建筑工程學(xué)院,天津 300354;2.天津大學(xué)水利工程仿真與安全國家重點實驗室,天津 300354)
我國從落后的農(nóng)業(yè)國發(fā)展成先進的工業(yè)國離不開礦產(chǎn)資源的勘探與開發(fā),而幾十年來陸地礦產(chǎn)資源已被過度開采,并且隨著海洋資源的發(fā)現(xiàn),人們把目光放在了深海礦產(chǎn)開發(fā)上。據(jù)估計,地球約75%的礦產(chǎn)資源都存在于深海海底,深海的礦產(chǎn)資源中有著大量社會發(fā)展所需要的銅、鎳、鈷等金屬資源。
當前,國際上通常使用的海底礦物主要采集方式為水面系統(tǒng)、揚礦系統(tǒng)和集礦系統(tǒng)組成的深海采礦系統(tǒng)。深水采礦水面系統(tǒng)主要是采礦船及運輸船,采礦船將礦漿倒載到礦漿運輸船,由運輸船將礦漿運輸?shù)桨丁2傻V船倒載礦漿過程中,運輸船旁靠在采礦船一側(cè),雙船之間通過系纜連接在一起。雙船旁靠外輸過程中,舷側(cè)間隙形成窄縫水體,窄縫水體振蕩對于雙船的動力響應(yīng)影響很大。計算分析旁靠的目的,是確定風浪流作用下,動力定位系統(tǒng)推進器的推力、雙船運動響應(yīng)、連接雙船纜變張力和護舷的撞擊力,評估外輸過程整個系統(tǒng)的安全。
雙船旁靠時窄縫水體振蕩頻率存在共振,勢流理論無法給出合理的水動力系數(shù)和波面升高,窄縫間的水體振蕩會產(chǎn)生附加阻尼。謝楠等[2]考慮不同雙船之間窄縫寬度研究水動力相互作用,表明窄縫內(nèi)水體附加阻尼需要考慮。HUIJSMANS R H M 等[3]提出了窄縫內(nèi)設(shè)置“阻尼蓋”,模擬窄縫水體振蕩附加阻尼。祁祺[4]計算浮式生產(chǎn)儲卸油裝置(Floating Production Storage and Offloading,F(xiàn)PSO) 外輸旁靠雙船的水動力系數(shù),試驗測定阻尼蓋系數(shù)可取0.05。XU L Y 等[5]研究雙駁船旁靠的水動力系數(shù),得到窄縫水體振蕩存在共振,需要引入阻尼蓋修正水面條件。康偉利[6]基于計算流體動力學(xué)(Calculation Fluid Dynamics,CFD) 方法確定窄縫水體水面阻尼蓋的阻尼系數(shù)。
深海采礦船另一個關(guān)鍵問題是沒有系泊線,采用動力定位系統(tǒng)(Dynamic Position,DP) 控制船舶的位置,其動力響應(yīng)計算需要優(yōu)化推進器的推力。目前DP 的先進控制算法是卡爾曼(Kalman) 濾波技術(shù)結(jié)合線性最優(yōu)二次型(Linear Quadratic,LQ)控制理論,動力定位系統(tǒng)中最核心的部分是通過控制算法優(yōu)化推進器的推力,合理分配推力抵抗環(huán)境載荷(環(huán)境載荷主要是波浪慢漂力、海流力和風力)。DP 系統(tǒng)的推力優(yōu)化算法,已經(jīng)編制在軟件SESAM 中的SIMO 模塊。朱梟猛等[7]基于勢流理論計算單采礦船的頻域響應(yīng),采用比例-積分-微分(Proportion-Integral-Derivative,PID) 控制器結(jié)合卡爾曼濾波的動力定位系統(tǒng)計算采礦船和輸漿管系統(tǒng)的時域動力響應(yīng)。田華勇等[8]使用SIMO 軟件對深水鉆井船建立了動力定位時域計算模型。
王浩[9]針對生活平臺與帶有動力定位系統(tǒng)的生產(chǎn)平臺靠泊,采用SIMO 軟件建立旁靠耦合模型,對旁靠外輸系統(tǒng)進行參數(shù)整定,優(yōu)化分配推進器推力計算平臺運動響應(yīng)。曹順利[10]研究了深海轉(zhuǎn)運采礦船作業(yè)模式,將動力定位系統(tǒng)以一個彈簧系統(tǒng)進行等效模擬,用以簡化采礦船在海面上的采礦作業(yè)定位計算。
綜上可知,目前對于旁靠外輸雙船耦合動力特性研究,主要是針對油氣外輸旁靠運輸船舶,該系統(tǒng)外輸過程雙船分別采用系泊線定位,沒有動力定位系統(tǒng)。但是對于水深6000 m 運輸船旁靠采礦船外輸,采用動力定位控制雙船運動,作業(yè)過程受到風浪流及DP 力作用,雙船運動十分復(fù)雜,其動力特性尚不清楚。整個系統(tǒng)包括雙船運動、連接纜繩、護舷等可靠性如何需要深入研究。綜合考慮動力定位、連接雙船系泊纜及風浪流載荷建立外輸耦合動力分析模型的方法也需要研究。
本文針對6000 m 水深動力定位采礦船旁靠外輸,計入雙船窄縫水體阻尼計算幅值響應(yīng)算子,考慮非線性剛度護舷及雙船連接纜,建立雙船耦合時域動力模型,通過參數(shù)整定優(yōu)化DP 系統(tǒng)推進器推力,計算時域動力響應(yīng)。本文建立了動力定位采礦船雙船旁靠外輸?shù)耐暾嬎惴治隽鞒蹋玫搅送廨斶^程雙船耦合動力響應(yīng)特性,包括雙船耦合運動特性、推力響應(yīng)特性和連接纜的動張力特性等。
1 數(shù)值計算理論和方法
1.1 水動力計算理論
雙船旁靠外輸任一浮體受到波浪入射力、繞射力和輻射力的作用,任一浮體的速度勢如下。
1.2 雙船旁靠頻域運動求解
針對深海采礦船外輸,記采礦船為a,運輸船為b,雙船旁靠外輸頻域運動方程見式(2)。
式中,ω 為波浪入射頻率;M 為浮體質(zhì)量矩陣;A 為浮體的附連水質(zhì)量矩陣;(C+D)為勢流阻尼和流體黏性阻尼疊加;K 為浮體靜水回復(fù)剛度;Xa和Xb分別為浮體a 和b 六個自由度的運動響應(yīng);變量下標ab 表示兩個浮體之間相互作用量;Fa和Fb分別為浮體a 和b 浮體所受的波浪力。由式(2)求解得到兩個浮體(采礦船和運輸船) 耦合的幅頻響應(yīng)算子(Response Amplitude Operator,RAOs)。
1.3 雙船旁靠時域運動方程
雙船旁靠外輸耦合運動為多浮體耦合,控制方程如下。
式中,A(∞)和C(∞)分別表示波頻趨向于無限大時附加質(zhì)量矩陣和勢流阻尼矩陣;fa(t)和fb(t)分別表示作用在兩個浮體上的環(huán)境力和動力定位系統(tǒng)推進器推力,風載荷和流載荷按照文獻[12]計算。
1.4 推進器推力優(yōu)化分配
采礦船動力定位系統(tǒng)采用DP3,推進器推力分配輸出基于環(huán)境載荷的變化進行實時優(yōu)化輸出[11]。
采用SESAM 軟件中SIMO 模塊實施卡爾曼濾波,調(diào)整控制增益矩陣和卡爾曼濾波增益矩陣實現(xiàn)推進器推力的優(yōu)化輸出。其中,控制增益矩陣見式(4)。
卡爾曼濾波增益矩陣見式(5)。
式中,Tx、Ty、Tφ分別為設(shè)置的采礦船縱蕩、橫蕩、艏搖的固有周期,在軟件SIMO 中給出了優(yōu)化推力過程該3 個周期的范圍;ξ 為無因次阻尼系數(shù);ωc為截斷頻率,用于濾除高頻載荷和高頻運動的影響。本文基于SIMO 軟件,輸入縱蕩、橫蕩質(zhì)量和艏搖轉(zhuǎn)動慣量,固有周期,截斷頻率ωc,以及不同自由度的阻尼系數(shù),計算得到式(4)和(5)所示矩陣。通過取不同的固有周期T 及截斷頻率,計算雙船位移矢量最小和推力最小時對應(yīng)的固有周期及截斷頻率,此過程稱為參數(shù)整定。最終將雙船位移矢量最小和推力最小時對應(yīng)的固有周期及截斷頻率,代入式(4)和(5),計算控制增益矩陣和濾波增益矩陣,由此得到優(yōu)化的推力,計算雙船耦合時域運動響應(yīng)。
1.5 雙船耦合運動阻尼
考慮流體黏性的阻尼系數(shù)基于式(6)計算[12]。
式中,(M+MA)為計入附連水質(zhì)量的船體重量;k 為靜水回復(fù)剛度系數(shù);ξ 為船舶不同自由度運動的阻尼比,通常取5%~10%,本文取7%。
為了解決流體振蕩共振水動力系數(shù)計算結(jié)果失真的問題,在窄縫流體表面設(shè)置“阻尼蓋”。窄縫內(nèi)流體阻尼力F 計算如下。
式中,u 為窄縫內(nèi)流體速度矢量;ε 為無因次阻尼系數(shù),在軟件HydroD 中建議取0.005~0.1,文獻[4]建議間距小于4 m 時ε 取0.05,本文窄縫間距3.5 m,取0.05。
基于文獻[12]及采用SIMO 軟件,計算式(3)的風載荷與流載荷。
2 旁靠雙船頻域水動力響應(yīng)
2.1 雙船頻域計算模型
2.1.1 采礦船和運輸船的技術(shù)參數(shù)[14]
外輸過程中,采礦船和運輸船通過15 根纜連接,雙船之間舷側(cè)安裝橡膠球形護舷材,護舷材直徑3.5 m,因此窄縫水體寬度為3.5 m。表1 為采礦船的技術(shù)參數(shù),基于實船資料確定,重心縱坐標位于船長中點。
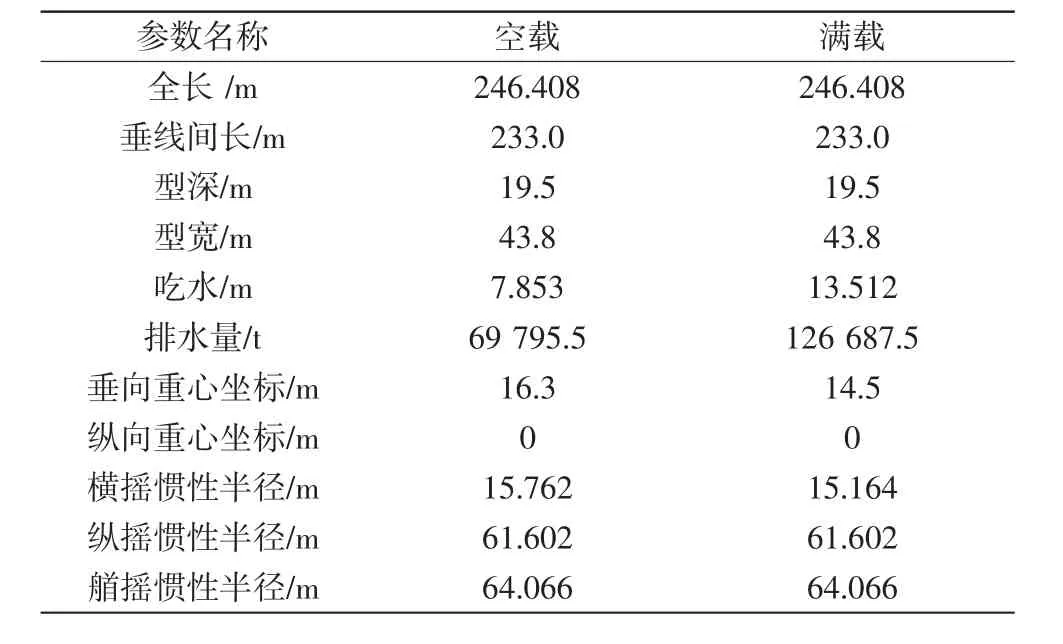
表1 采礦船主要技術(shù)參數(shù)
表2 為運輸船技術(shù)參數(shù),重心縱坐標位于船長中點。
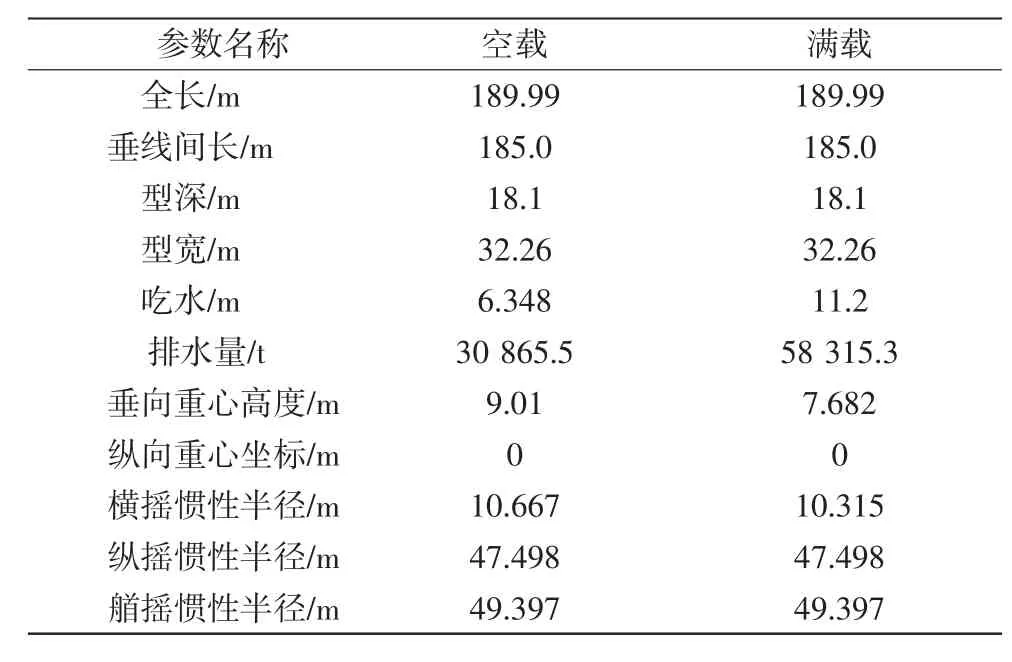
表2 運輸船主要技術(shù)參數(shù)
2.1.2 旁靠雙船耦合數(shù)值模型
建立模型時取如圖1 所示的坐標系,坐標原點取在船舶重心。
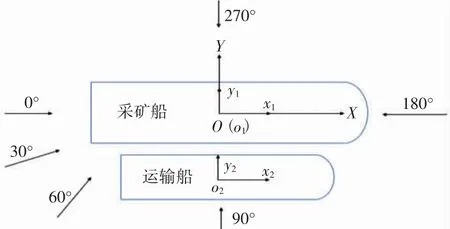
圖1 旁靠雙船坐標系(俯視圖)
雙船耦合水動力模型如圖2 所示。雙船網(wǎng)格數(shù)量分別劃分為5002 和3171 個,經(jīng)過網(wǎng)格無關(guān)性檢驗滿足精度要求。
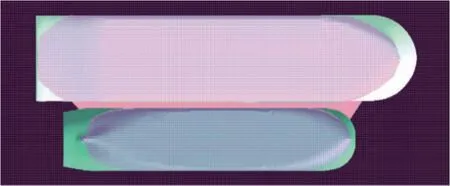
圖2 旁靠雙船耦合模型
雙船之間窄縫“阻尼蓋”設(shè)置方法[5,14]:阻尼蓋覆蓋窄縫水體,長度等于運輸船長度,阻尼蓋寬度3.5 m,阻尼蓋相當于在水面建立一個自由面,自由面采用四邊形單元網(wǎng)格,阻尼系數(shù)為0.05。
選取3 種典型工況,工況設(shè)置如表3,計算分析RAOs 并進行時域耦合運動響應(yīng)分析。
表3 RAOs 計算工況
2.2 雙船耦合RAOs 計算結(jié)果
選取浪向范圍0°~270°,間隔30°計算幅頻響應(yīng)幅值,圖3 至圖5 為幅頻響應(yīng)部分計算結(jié)果。

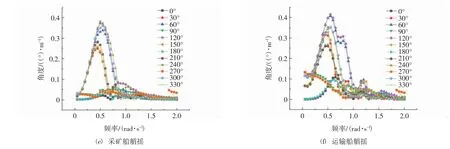
圖3 工況1 雙船耦合的RAOs
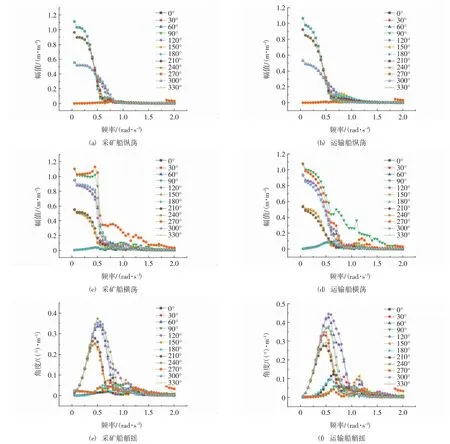
圖4 工況2 雙船耦合的RAOs
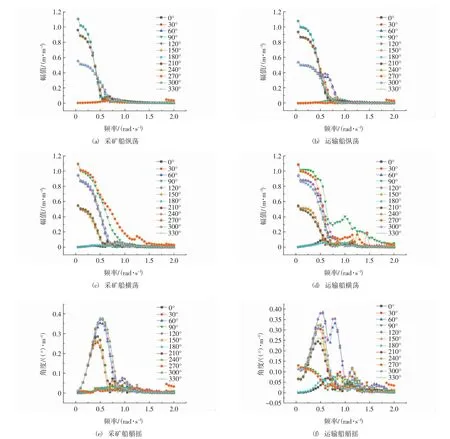
圖5 工況3 雙船耦合的RAOs
由圖3 至圖5 可知,橫浪時雙船出現(xiàn)縱蕩,順浪時雙船出現(xiàn)橫蕩,這是由雙船間隙內(nèi)水動力相互作用引起的。采礦船橫蕩自由度在浪向為270°時幅值最大,而運輸船橫蕩自由度在浪向為90°時幅值最大,270°浪向時,波浪直接作用在采礦船,由于遮蔽效應(yīng),運輸船的運動減小。此外60°浪向采礦船和運輸船艏搖幅值最大。
3 雙船旁靠動力定位系統(tǒng)參數(shù)整定
3.1 雙船連接方式及參數(shù)整定模型[13]
考慮雙船通過15 根尼龍纜在舷側(cè)連接(連接方式見圖6) 及護舷作用,建立雙船耦合時域運動計算模型,見圖6。基于卡爾曼濾波結(jié)合線性二次型LQ 最優(yōu)控制算法,優(yōu)化動力定位系統(tǒng)推力,對于動力定位系統(tǒng)的濾波增益和控制增益中的不確定性參數(shù)進行整定[14]。針對180°浪向,計算外輸雙船耦合時域動力響應(yīng)。
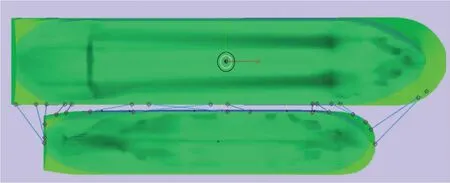
圖6 系纜連接方式及雙船耦合運動計算模型
雙船系纜參數(shù):尼龍纜軸向剛度3375 kN,破斷張力1449 kN,安全工作負荷796.95 kN。護舷最大反力2358 kN,護舷反力與變形之間關(guān)系如圖7,將圖7 數(shù)據(jù)輸入軟件SIMO,計算不同時刻的護舷反力。
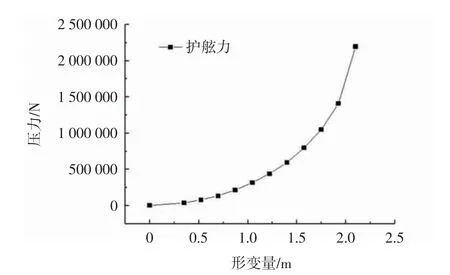
圖7 護舷反力與形變量示意圖
海洋環(huán)境參數(shù):風浪流同向。有義波高2.5 m,譜峰周期7s,浪向180°;風速13.8m/s;流速1.0m/s。
3.2 動力定位系統(tǒng)推力優(yōu)化
3.2.1 推進器性能
深海采礦船配DP3 動力定位,設(shè)6 個全回轉(zhuǎn)式推進器,推進器布置示意圖如圖8 所示,表4 列出了推進器性能參數(shù),表5 列出了推進器位置坐標。
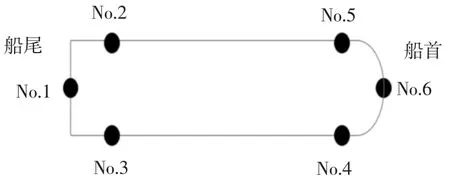
圖8 推進器布置示意圖(俯視圖)
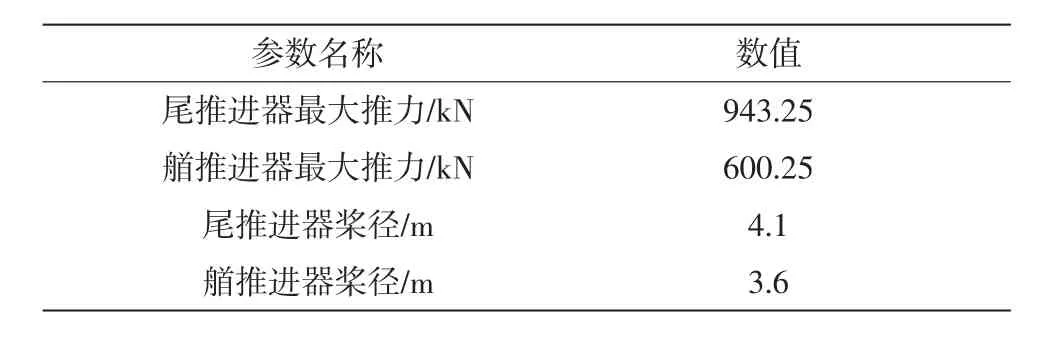
表4 推進器性能參數(shù)
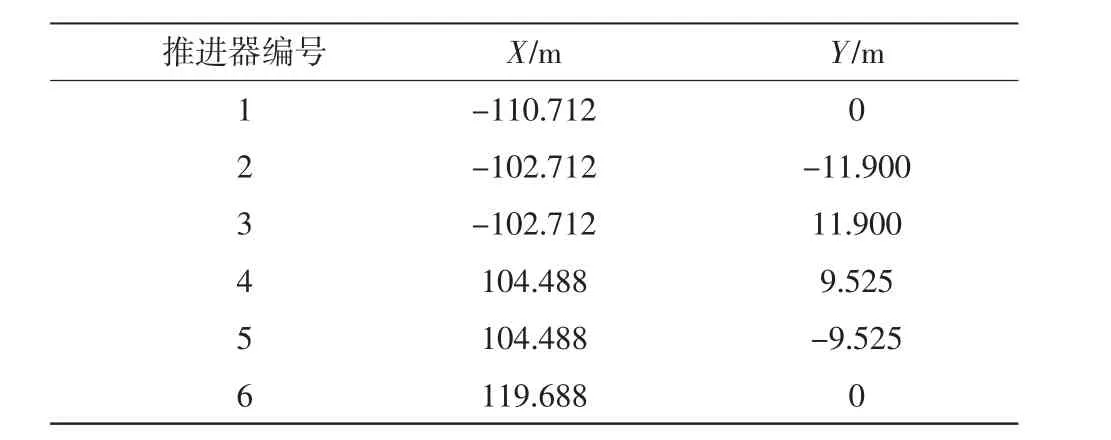
表5 推進器位置坐標
3.2.2 動力定位參數(shù)整定
對動力定位控制參數(shù)進行整定是為了綜合考慮船體低頻位移、雙船相對運動、連接系統(tǒng)安全性、推進器總推力等因素,選取合適的采礦船縱蕩、橫蕩和艏搖固有周期和截斷周期組合。對于自由狀態(tài)的采礦船,其縱蕩、橫蕩和艏搖是沒有固有周期的,通過DP 作用(DP 作用與系泊線類似),使縱蕩、橫蕩和艏搖具有回復(fù)能力即產(chǎn)生固有周期,確定的原則是使推力得到優(yōu)化。根據(jù)軟件SIMO 手冊建議值,用于動力定位控制的船體固有周期取值區(qū)間為60~150 s,間隔10 s 選取;濾波器截斷周期取值區(qū)間為25~50 s,間隔5 s 選取。選擇出合適的固有周期和截斷周期參數(shù)組合,對推進器實施推力優(yōu)化。依據(jù)3 個指標選擇參數(shù)組合:①采礦船遠離于期望位置的水平面矢量位移最大值最小;②相對于期望狀態(tài)的艏搖角最大值最小;③推進器的功率最大值最小。
參數(shù)整定方法是將風浪流參數(shù)輸入SIMO 模塊,模擬時長3 h,得到雙船各自的運動矢量和推力。對3 種工況進行參數(shù)整定,模擬時長3 h,計算采礦船在水平面內(nèi)的位移矢量和推進器推力,得到位移矢量和推力結(jié)果曲線。圖9 為工況1 整定得到的位移矢量和推力曲線。

圖9 工況1(雙船空載) 動力定位控制參數(shù)整定
從圖9 位移整定結(jié)果中可以看出,隨著固有周期和截斷周期增大,采礦船在水平面遠離期望位置的位移的最大值和平均值也隨之增大,選取滿足控制指標①的參數(shù)組合為固有周期60 s,截斷周期25 s。隨著固有周期增大,推進器推力最大值和平均值曲線隨之增大,推進器推力隨著截斷周期的增大總體上呈現(xiàn)減小的趨勢,選取滿足控制指標③的參數(shù)組合為固有周期150 s,截斷周期50 s。
在采礦船外輸作業(yè)設(shè)計考慮因素中,采礦船艏搖角均較小。采礦船位移最大值和推進器推力最大值為考慮作業(yè)安全性最重要的因素。
對于工況2 和工況3 的參數(shù)整定結(jié)果表明,3種工況下采礦船艏搖角均較小,因此以船體位移矢量最大值最小和推進器推力最大值最小作為整定指標。推力優(yōu)化的參數(shù)整定結(jié)果如表6 所示。
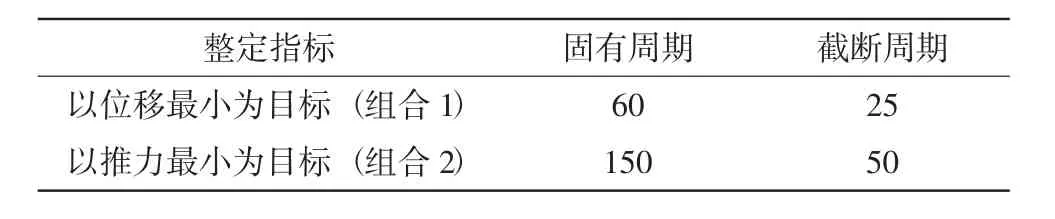
表6 浪向180°動力定位控制參數(shù)整定結(jié)果 單位:s
4 浪向180°旁靠雙船耦合時域運動響應(yīng)計算
針對動力定位參數(shù)整定結(jié)果,考慮180°浪向,基于表6 計算3 種工況的雙船耦合時域運動響應(yīng)。對于雙船運動,更關(guān)注雙船之間的相對運動,因此,給出雙船相對運動的時域響應(yīng)結(jié)果。
3 種工況雙船相對縱蕩運動、相對橫蕩及相對艏搖運動時域運動響應(yīng)如圖10 所示。
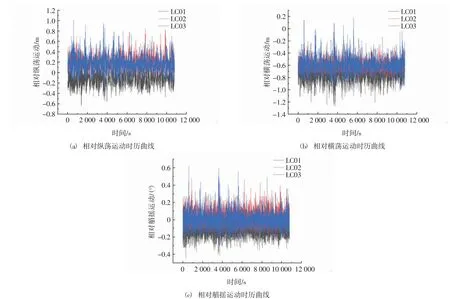
圖10 浪向180°雙船相對運動時域歷程曲線
表7統(tǒng)計了3 種工況雙船縱蕩、橫蕩和艏搖相對運動結(jié)果。由表7 看出,工況2 相對運動幅值最小,工況1 其次,工況3 雙船相對運動幅值最大,這是因為一階波浪力和海流力共同作用的結(jié)果,此外工況2 運輸船質(zhì)量最大,抵抗波浪力能力的更強。

表7 雙船相對運動統(tǒng)計結(jié)果
3 種工況推進器推力、系泊纜張力、護舷壓力最大值統(tǒng)計結(jié)果如圖11 所示。
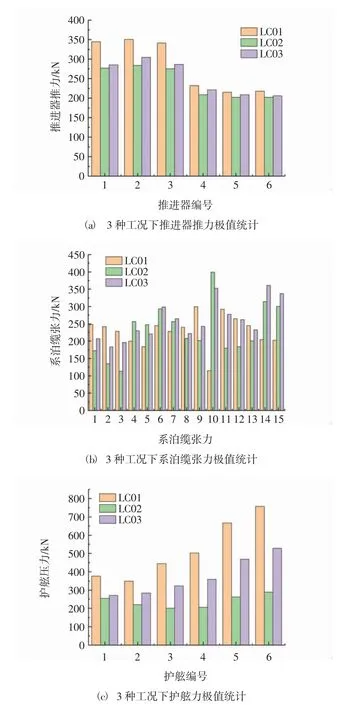
圖11 推力、系纜張力及護舷力極值統(tǒng)計結(jié)果
由圖11 可知,6 個推進器推力均小于推進器可提供最大推力,工況1 推力最大,工況2 最小,所有推進器推力裕度較大,表明在此海況下動力定位系統(tǒng)能夠滿足3 種工況的定位要求。系泊纜張力值與船體六個自由度運動大小及導(dǎo)纜孔位置有關(guān),3種工況對比下,工況1 尾纜張力較大,工況3 艏纜張力較大。雙船間纜繩張力、護舷壓力與許用值比較,具有足夠的安全裕度。
5 結(jié)論
本文針對6000 m 水深動力定位采礦船旁靠運輸船外輸,建立了雙船耦合運動分析模型,通過DP 系統(tǒng)的參數(shù)整定優(yōu)化推力,計算3 種工況的幅頻響應(yīng)和雙船時域動力響應(yīng),得到了雙船不同自由度的相對運動、推進器的推力、系纜張力等。主要結(jié)論如下。
(1) 建立了水深6000 m 動力定位采礦船旁靠外輸?shù)碾p船耦合計算模型,雙船間隙設(shè)置阻尼蓋抑制舷側(cè)窄縫流體諧振是一種有效方法。
(2) 對于深海采礦船動力定位系統(tǒng)的推力優(yōu)化,進行參數(shù)整定,參數(shù)整定過程以位移矢量最大值最小和推進器功率最小為整定目標得到參數(shù)組合是可行的。
(3) 6 個推進器推力均小于動力定位系統(tǒng)提供的最大推力,工況1 推力最大,工況2 推力最小,所有推進器推力裕度較大,表明在給定海況動力定位系統(tǒng)能夠滿足3 種工況的定位要求。
(4) 雙船間連接纜張力、護舷壓力與許用值比較,均小于許用值,具有足夠的安全裕度,雙船間連接纜及護舷強度滿足要求。
猜你喜歡
上海交通大學(xué)學(xué)報(2023年6期)2023-07-05 08:46:18
艦船科學(xué)技術(shù)(2021年7期)2021-08-11 15:30:38
中國港灣建設(shè)(2021年3期)2021-03-27 12:11:12
橡塑技術(shù)與裝備(2021年1期)2021-01-05 04:00:56
港工技術(shù)(2019年2期)2019-05-29 07:08:34
中國港灣建設(shè)(2019年3期)2019-03-26 08:56:02
造船技術(shù)(2018年5期)2018-11-01 03:28:52
中國港灣建設(shè)(2018年5期)2018-05-19 07:35:04
海洋工程(2016年6期)2016-10-12 01:47:15
中國水運(2014年6期)2014-08-11 09:55:22