基于滑移非理想赫茲接觸的滾動(dòng)軸承振動(dòng)特性分析
2023-03-20 02:20:32涂文兵張桂源楊本夢(mèng)
振動(dòng)與沖擊 2023年5期
涂文兵, 張桂源, 羅 丫, 陳 超, 梁 杰, 楊本夢(mèng)
(華東交通大學(xué) 機(jī)電與車輛工程學(xué)院,南昌 330013)
滾動(dòng)軸承因其特殊結(jié)構(gòu)和工作原理,廣泛應(yīng)用于航空發(fā)動(dòng)機(jī)、高速列車和數(shù)控機(jī)床等旋轉(zhuǎn)機(jī)械中。隨著機(jī)械系統(tǒng)的可靠性和精度要求日益提高,滾動(dòng)軸承的振動(dòng)特性也變得愈發(fā)重要,在故障診斷、機(jī)械系統(tǒng)檢測(cè)和滾動(dòng)軸承設(shè)計(jì)等領(lǐng)域中,軸承振動(dòng)信號(hào)也作為一項(xiàng)非常重要的指標(biāo)得到廣泛應(yīng)用[1-3]。因此對(duì)軸承振動(dòng)特性的深入探究也具有十分重要的意義。
目前,國內(nèi)外學(xué)者主要是基于理想赫茲理論建立滾動(dòng)軸承動(dòng)力學(xué)模型,對(duì)軸承的振動(dòng)特性和機(jī)理進(jìn)行了大量研究。Sunnerjo[4]最先建立了滾動(dòng)軸承動(dòng)力學(xué)模型分析了軸承的振動(dòng)特性。Fukata等[5]簡化了軸承轉(zhuǎn)子系統(tǒng),采用數(shù)值仿真對(duì)軸承的非線性振動(dòng)特性進(jìn)行分析。Lioulios等[6]基于赫茲理論建立了軸承動(dòng)力學(xué)模型,研究轉(zhuǎn)速波動(dòng)工況下軸承的振動(dòng)特性。Alireza提出了一種缺陷故障非線性動(dòng)力學(xué)模型,該模型能準(zhǔn)確預(yù)測(cè)滾動(dòng)體過故障的加速度振動(dòng)頻率。常斌全等[7]基于Sunnersjo建立的模型進(jìn)行改進(jìn),通過時(shí)、頻域信號(hào)分析了故障軸承的振動(dòng)特性。Shah等基于非線性赫茲理論,建立考慮油膜剛度的軸承動(dòng)力學(xué)模型,研究了載荷、轉(zhuǎn)速和波紋度等對(duì)軸承振動(dòng)頻率和振動(dòng)幅值的影響。余偉光等[8]基于線性回歸對(duì)赫茲理論進(jìn)行簡化,建立深溝球軸承模型,同樣分析了波紋度對(duì)軸承振動(dòng)的影響。Liu等[9-14]基于赫茲理論建立了故障軸承動(dòng)力學(xué)模型,研究了多種故障特征對(duì)軸承振動(dòng)特性的影響。Han等[15]建立轉(zhuǎn)子系統(tǒng)非線性數(shù)值仿真模型,也分析了故障對(duì)軸承振動(dòng)特性的影響規(guī)律。宋傳沖等[16]進(jìn)一步考慮滾道裂紋的影響,基于非線性赫茲接理論建立轉(zhuǎn)子系統(tǒng)動(dòng)力學(xué)模型,分析了轉(zhuǎn)速和剛度等對(duì)系統(tǒng)動(dòng)力學(xué)特性的影響。Tu等[17]考慮軸承滑移時(shí)摩擦力的作用,通過建立圓柱滾子軸承打滑振動(dòng)模型分析軸承的振動(dòng)特性,但模型同樣是基于赫茲接觸理論進(jìn)行建立。
以上文獻(xiàn)都是基于赫茲理論建立的軸承動(dòng)力學(xué)模型,從不同角度分析了軸承的振動(dòng)特性,但在實(shí)際運(yùn)行工況中,軸承各部件之間不可避免會(huì)出現(xiàn)滑移現(xiàn)象,而滑移產(chǎn)生的摩擦力和切應(yīng)力已超出赫茲理論的假設(shè)范疇,因此,基于赫茲理論建立的模型并不適用于分析軸承出現(xiàn)滑移的工況。雖然Kaller[18]考慮兩接觸面摩擦力、相對(duì)位移和切應(yīng)力對(duì)接觸特性的影響,并提出了非理想赫茲理論,但Kaller的研究只對(duì)接觸特性進(jìn)行了分析,并未基于所提出的非理想赫茲理論對(duì)軸承振動(dòng)特性展開深入研究。因此有必要考慮軸承滑移對(duì)接觸特性的影響,建立動(dòng)力學(xué)模型分析滾動(dòng)軸承的振動(dòng)特性。
本文對(duì)滑移非理想赫茲進(jìn)行理論分析,并通過建立局部接觸有限元模型獲得滾子與滾道的滑移接觸指數(shù)和接觸剛度;基于滑移非理想赫茲系數(shù)和剛性套圈假設(shè)理論建立考慮滑移接觸的滾動(dòng)軸承動(dòng)力學(xué)模型,對(duì)比分析滑移非理想赫茲和理想赫茲接觸對(duì)軸承振動(dòng)特性的影響規(guī)律。
1 滾動(dòng)軸承滑移接觸理論分析
滾動(dòng)軸承各部件之間的運(yùn)動(dòng)關(guān)系極為復(fù)雜,當(dāng)滾子受到的驅(qū)動(dòng)力不足以克服阻力時(shí),滾子與滾道之間的接觸面就會(huì)產(chǎn)生相對(duì)滑移[19]。滾子與滾道的滑移接觸會(huì)伴隨一定的摩擦力和切應(yīng)力,而理想赫茲理論忽略了接觸面之間摩擦力、切應(yīng)力和相對(duì)滑移的影響,因此基于理想赫茲理論分析軸承振動(dòng)特性會(huì)存在一定的影響。為了更準(zhǔn)確描述滾動(dòng)軸承的振動(dòng)特性,本文基于赫茲理論,考慮滾子與滾道接觸面的滑移作用,推導(dǎo)了滑移接觸下滾子與滾道的載荷-變形公式。
如圖1所示,在外加載荷F的作用下,滾子與滾道相對(duì)滑移速度為ω,此時(shí),滾子受到水平向左的牽引摩擦力F1;滾子與滾道發(fā)生接觸變形后,接觸面與x軸之間會(huì)形成接觸角α,此時(shí)滾子在滾道上滑動(dòng),滾道接觸面為抵抗x方向的擠壓變形,對(duì)滾子產(chǎn)生一個(gè)水平向左的作用力,即滾子受到的切應(yīng)力。滾子因摩擦力產(chǎn)生的切應(yīng)力和滾道抵抗擠壓變形對(duì)滾子切應(yīng)力的合力設(shè)為F2。圖1中,滾子與滾道的滑移接觸斑區(qū)域可以分為滑移區(qū)S、接觸區(qū)H和滑移變形產(chǎn)生的多余接觸面積DH。

圖1 滑移前后接觸斑Fig.1 Contact spots before and after sliding
如圖2所示,當(dāng)軸承在載荷F作用下,滾子與滾道之間存在正方向上的接觸應(yīng)力為σ1;進(jìn)一步考慮滾子與滾道接觸面之間的滑移速度ω時(shí),滾子與外滾道會(huì)增加一個(gè)斜方向上的應(yīng)力σ2,其中σ2與滑移接觸面垂直;此時(shí)考慮滑移接觸的總應(yīng)力為σ3。

圖2 滑移接觸應(yīng)力分布Fig.2 Sliding contact stress distribution
純滾動(dòng)條件下滿足赫茲接觸理論,滾子與外滾道之間作用力為F,結(jié)合Palmreng公式[20]得出滾子與滾道接觸變形為
(1)
式中:l為滾子與滾道的有效接觸長度;υ1、υ2為泊松比;E1、E2為滾子與滾道的彈性模量。
由式(1)可知,接觸變形與載荷的0.9次方成正比,故滾子與滾道的接觸剛度表示為
(2)
結(jié)合式(1)、(2)可得出理想赫茲接觸下滾子與外滾道接觸的載荷計(jì)算公式為
(3)
如圖3所示,令滾子在水平方向所受到的合力為ΔF,則
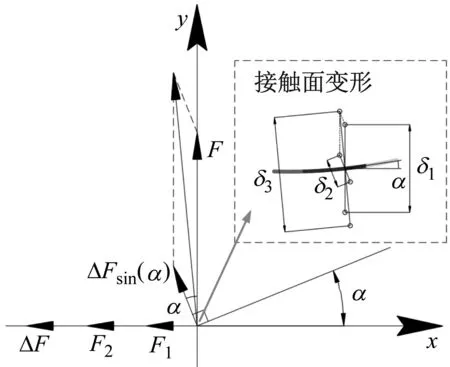
圖3 滑移接觸下載荷-變形Fig.3 Load-deformation of sliding contact
ΔF=F2+F1=F2+μc×F
(4)
式中:F2為滾道對(duì)滾子的剪切應(yīng)力;F1為滾子所受摩擦力;μc為牽引摩擦因數(shù)。
在滾子與滾道發(fā)生滑移接觸時(shí),接觸面與x軸形成蠕滑角α,考慮滑移產(chǎn)生附加接觸變形量的大小為
(5)
如圖3所示,ΔFsin(α)與滑移接觸面垂直,同樣基于赫茲接觸理論可得
(6)
從圖3中可以得出在外加載荷F的作用下,滾子與滾道滑移接觸的總變形為
(7)
在實(shí)際運(yùn)行工況中,滑移接觸角α極小,因此從式(7)中可以看出總接觸變形δ3增大,且可近似認(rèn)為滑移接觸下總接觸變形δ3與接觸面垂直,即滑移接觸下滾子與滾道的載荷-變形公式可以用冪指函數(shù)表示為
(8)
式(8)中接觸剛度和指數(shù)均為滑移接觸下計(jì)算的系數(shù)值,其中kh與nh均為考慮滑移接觸修正后的滑移接觸剛度和滑移指數(shù),與理想赫茲接觸下的接觸剛度和指數(shù)不同,即nh≠n,kh≠k。
2 載荷-位移公式系數(shù)修正
通過上述滑移接觸的理論分析得出考慮滑移接觸下的載荷-變形公式,但上述切應(yīng)力F2與接觸角α無法通過實(shí)驗(yàn)測(cè)量,所以式(8)中的滑移接觸剛度kh和指數(shù)nh值無法確定。故本文以NU306圓柱滾子軸承為研究對(duì)象,通過建立滾子與滾道的局部接觸有限元模型求解滑移接觸的變形系數(shù)(kh,nh)。NU306軸承的基本參數(shù)如表1所示。

表1 NU306軸承參數(shù)Tab.1 Parameters of NU306 bearing
2.1 滾子接觸有限元模型建立
由于局部滾子接觸有限元模型不僅能簡化模型的復(fù)雜程度,同時(shí)能提高模型的計(jì)算精度和計(jì)算效率,因此本文通過建立局部滾子接觸有限元模型替代整體軸承模型計(jì)算滑移接觸下的kh,nh值。
在實(shí)際工況中,外加載荷不足以使軸承發(fā)生塑性變形,因此將軸承的材料設(shè)置為線彈性材料,材料均為G20Cr2Ni4鋼[21],材料密度ρ=7 810 kg/m3,彈性模量E=206 GPa,泊松比v=0.3。滾子與滾道的接觸方式設(shè)置為面-面接觸;在不考慮潤滑條件下,為真實(shí)模擬滾子與滾道的接觸關(guān)系,設(shè)置滾子與滾道之間的靜摩擦因數(shù)為0.15,動(dòng)摩擦因數(shù)為0.02。
如圖4所示,滾子與滾道采用SOLID185作為離散實(shí)體單元,各節(jié)點(diǎn)具有x,y,z三個(gè)方向的平移自由度;為保證載荷施加均勻,定義滾子中間截面為剛性殼單元SHELL181,與滾子實(shí)體共節(jié)點(diǎn),在滾子中間面施加沿y軸負(fù)方向的載荷F同時(shí)對(duì)滾子設(shè)置y方向位移[22]。為實(shí)現(xiàn)滾子與滾道之間的相對(duì)滑移,在模型中定義軸承外滾道的外徑面為剛性殼體單元SHELL181,與滾道外側(cè)面共節(jié)點(diǎn),設(shè)置外徑面繞z軸逆時(shí)針的旋轉(zhuǎn),實(shí)現(xiàn)滾子與滾道的相對(duì)滑移。
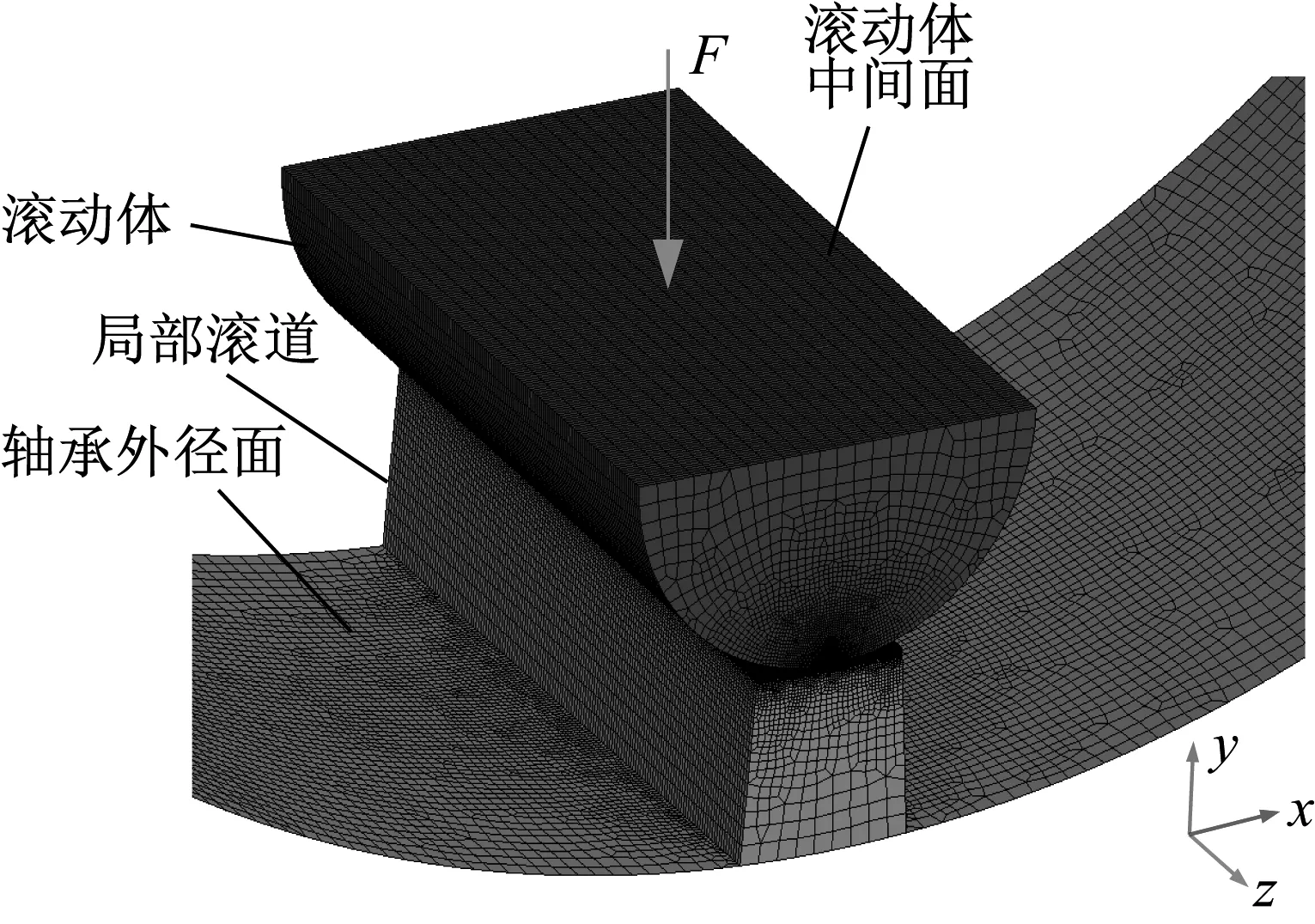
圖4 軸承局部有限元模型Fig.4 Local finite element model of bearing
為確定合適的網(wǎng)格密度,反映滾子與滾道更為準(zhǔn)確的接觸特性,本文通過對(duì)滾子和滾道進(jìn)行區(qū)域網(wǎng)格細(xì)化。初始設(shè)定單元網(wǎng)格尺寸大小為0.5 mm,按照不同細(xì)化等級(jí)向滾子與滾道的接觸區(qū)進(jìn)行網(wǎng)格逐步細(xì)化[23]。通過設(shè)置不同網(wǎng)格細(xì)化等級(jí)對(duì)網(wǎng)格進(jìn)行過渡加密,按照接觸區(qū)的網(wǎng)格大小分為粗網(wǎng)格、半精網(wǎng)格和精網(wǎng)格,并對(duì)計(jì)算精度和計(jì)算時(shí)間進(jìn)行對(duì)比。細(xì)化網(wǎng)格參數(shù)如表2所示,其中半精網(wǎng)格下滾子和局部滾道的逐步細(xì)化網(wǎng)格如圖5所示。
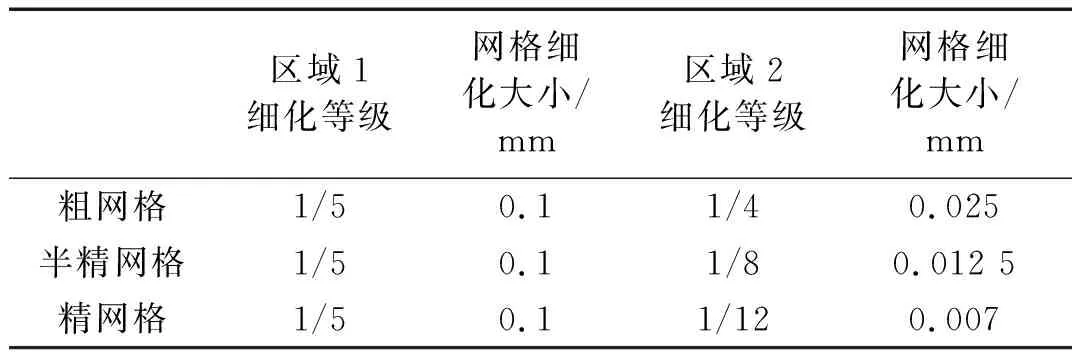
表2 網(wǎng)格細(xì)化參數(shù)Tab.2 Mesh refinement parameter

圖5 半精網(wǎng)格細(xì)化過程Fig.5 Semi-process mesh refinement process
2.2 有限元模型驗(yàn)證與系數(shù)修正
基于上述建立的三種不同網(wǎng)格精度的模型,考慮軸承實(shí)際運(yùn)行載荷,設(shè)置載荷大小分別為500 N、1 000 N、3 000 N、4 000 N、5 000 N,計(jì)算時(shí)間設(shè)置為0.001 5 s。將設(shè)置好的模型分別求解,提取滾子、滾道總接觸變形與赫茲理論計(jì)算值對(duì)比,得出半精網(wǎng)格的計(jì)算精度較高,其誤差均小于8%,而粗網(wǎng)格計(jì)算誤差較大,精網(wǎng)格計(jì)算時(shí)間較長,且精度沒有明顯升高,綜合考慮模型的計(jì)算效率和計(jì)算精度,故本文采用半精網(wǎng)格進(jìn)行后續(xù)計(jì)算。
通過上述施加的載荷,對(duì)外徑面施加一個(gè)繞Z軸順時(shí)針方向的轉(zhuǎn)動(dòng),角速度為2 rad/s的相對(duì)滑移速度,計(jì)算時(shí)間同上。為探究不同滑移速度對(duì)接觸變形的影響,在3 000 N的工況下設(shè)置0.5 rad/s,1 rad/s,1.5 rad/s,2.5 rad/s,3 rad/s的滑移轉(zhuǎn)速,計(jì)算時(shí)間分別設(shè)置0.06 s,0.03 s,0.02 s,0.01 s,將設(shè)置好的模型導(dǎo)入LS-DYNA中求解。
根據(jù)滾子與滾道的運(yùn)動(dòng)關(guān)系,可得出如圖6所示的滑移前后關(guān)系圖,其中O、A為為滑移前的位置點(diǎn),O′、A′為滑移后的位置點(diǎn),通過計(jì)算考慮滑移后模型的總接觸變形計(jì)算為

圖6 滑移運(yùn)動(dòng)位置關(guān)系Fig.6 Position relation of sliding motion
δ3=Δy_rolling+Δy_outer-Δy-Pd_FEM
(9)
式中:Δy_rolling、Δy_outer分別為滾子與滾道在y軸負(fù)方向的最大變形值;Pd_FEM為初始徑向游隙;Δy為考慮滑移后在y方向增加的位移量。
其中Δy可表示為
(10)
式中:Ro為軸承的外滾道半徑;Δx為外滾道滑移后x方向的增加的位移量。
通過數(shù)據(jù)的提取與計(jì)算,獲得模型接觸變形值進(jìn)行對(duì)比,如圖7所示。從圖7(a)可以觀察出考慮滑移接觸的變形值大于赫茲理論計(jì)算結(jié)果,這是由于滾子與滾道的滑移接觸產(chǎn)生了摩擦力與切應(yīng)力作用,導(dǎo)致滾子與滾道之間的接觸面增大,故滑移接觸下的接觸變形大于赫茲接觸,與式(7)中分析出δ3>δ1的結(jié)果一致;而隨載荷增大,滑移接觸與赫茲接觸的差值增大,是因?yàn)檩d荷增大,滾子與滾道的摩擦力和切應(yīng)力增大,式(5)中摩擦力和切應(yīng)力增大會(huì)導(dǎo)致接觸變形δ2增大,而赫茲理論不考慮相對(duì)滑移作用,因此載荷增大,滑移與赫茲接觸的差值就增大;同時(shí)得出在重載工況,滑移對(duì)軸承接觸變形的影響更為明顯。如圖7(b)所示,當(dāng)外加載荷一定時(shí),不同相對(duì)滑移速度對(duì)變形值影響較小,即可以忽略不同滑移速度帶來的影響。

(a) 不同載荷下接觸變形
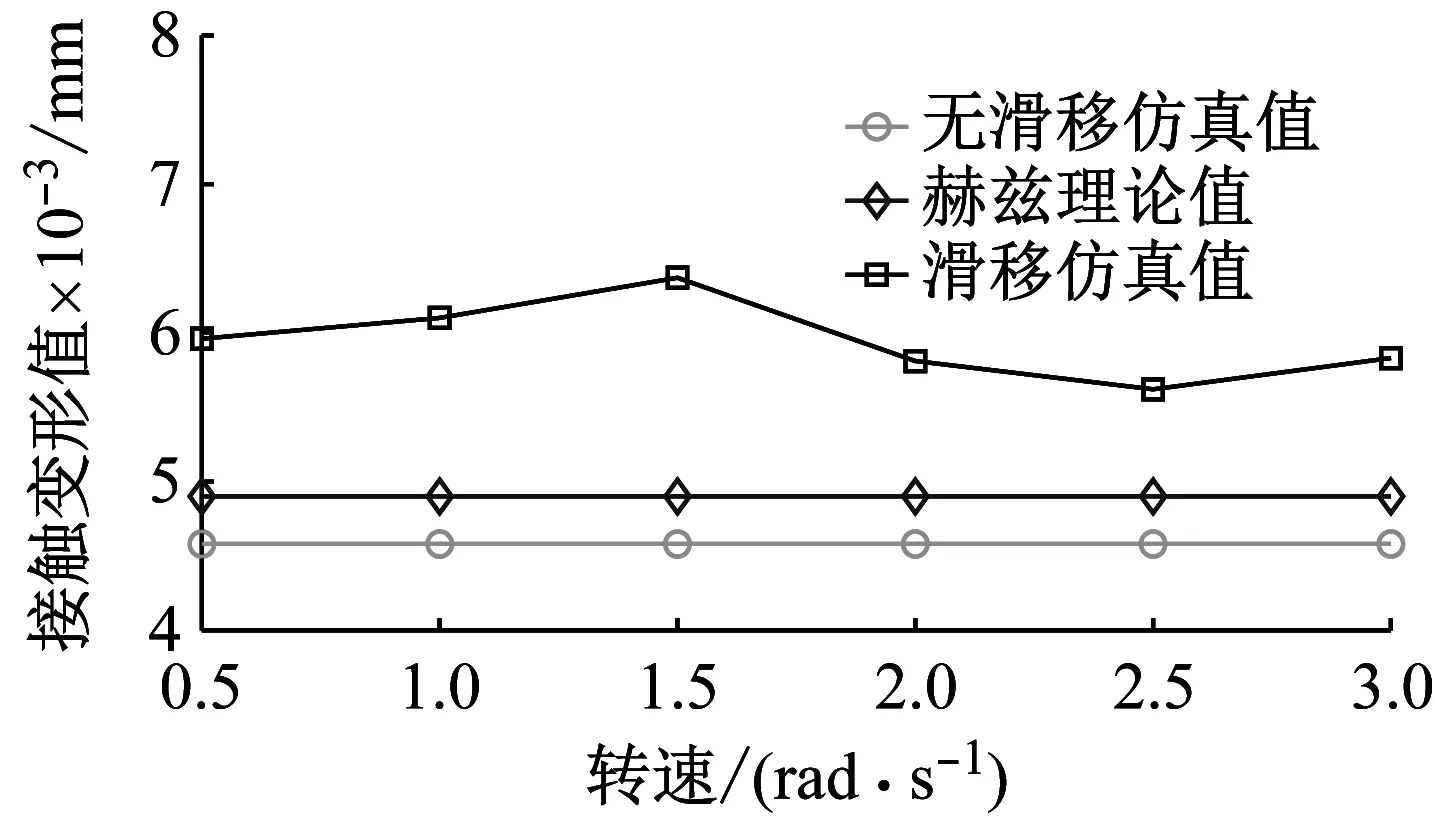
(b) 不同滑移速度下接觸變形圖7 接觸變形對(duì)比Fig.7 Comparison of contact deformation
綜上所述,赫茲理論忽略了接觸面相對(duì)滑移的影響,而在實(shí)際工況中,滾子與滾道不可避免會(huì)發(fā)生相對(duì)滑移,同時(shí)伴隨摩擦力和切應(yīng)力的產(chǎn)生,因此針對(duì)軸承振動(dòng)特性的研究,應(yīng)該考慮軸承接觸面之間相對(duì)滑移的作用。
通過對(duì)滑移接觸的變形值進(jìn)行冪指函數(shù)擬合,可獲得載荷-變形公式(8)中的接觸系數(shù),其中擬合后的曲線與仿真結(jié)果的相似度為99.8%,故用此擬合曲線的系數(shù)表示滑移接觸剛度kh和滑移指數(shù)nh值,如表3所示。考慮到分析對(duì)象為圓柱滾子軸承,由文獻(xiàn)[24]可知滾子與內(nèi)、外滾道的載荷-變形公式一致,為縮短計(jì)算時(shí)間,設(shè)滾子和內(nèi)滾道的載荷-變形系數(shù)與外滾道一致。

表3 載荷-變形系數(shù)Tab.3 Load-deformation coefficient
3 振動(dòng)特性分析
3.1 滾動(dòng)軸承動(dòng)力學(xué)模型的建立
為研究滑移接觸下滾動(dòng)軸承的振動(dòng)特性,本文建立圓柱滾子軸承動(dòng)力學(xué)模型,將滾子與滾道之間接觸考慮成彈簧-阻尼系統(tǒng),如圖8所示。其中θj為滾子相對(duì)于X軸的位置角,θj表達(dá)式為

圖8 滾動(dòng)軸承動(dòng)力學(xué)模型Fig.8 Dynamic model of rolling bearing
(11)
式中:t為時(shí)間;ωc為保持架的轉(zhuǎn)速;Nb為滾子數(shù)量。
基于剛性套圈假設(shè)[25],圓柱滾子軸承動(dòng)力學(xué)微分方程可表示為
(12)
式中:mi為內(nèi)圈(含轉(zhuǎn)子)質(zhì)量;c為油膜阻尼系數(shù);k、n分別表示為滾子與滾道的接觸剛度和變形指數(shù)(滑移和赫茲接觸下的k、n值見表3);Fx、Fy分別表示內(nèi)圈所受沿X、Y方向的載荷分量;δj為第j個(gè)滾子與內(nèi)外滾道之間的總接觸變形。
第j個(gè)滾子與內(nèi)外滾道之間的總接觸變形表示為
(13)
式中,Pd為滾子與內(nèi)、外滾道之間的徑向游隙,‘+’表示為括號(hào)內(nèi)的值大于零,否則接觸變形值為零。
對(duì)于軸承載荷與轉(zhuǎn)速的選擇,由文獻(xiàn)[26]可知NU306圓柱滾子軸承額定動(dòng)載荷公式為
P=bmfc(l×cosα)7/9Nb3/4D29/27
(14)
式中:bm為材料的加工系數(shù);fc為形狀精度系數(shù);l為滾子有效長度;α為接觸角;Nb為滾動(dòng)體個(gè)數(shù);D為滾動(dòng)體直徑。
由上式計(jì)算得出軸承的額定動(dòng)載荷P為47 944.12 N,由經(jīng)驗(yàn)公式(15)取1 000 N、5 000 N、9 000 N為軸承的輕載、中載與重載工況;同時(shí)取1 000 r/min、3 000 r/min、5 000 r/min為軸承的低、中、高速工況,采用四階定步長Runge-Kutta法對(duì)微分方程求解,計(jì)算步長設(shè)為Δt=1×10-6s。
通過上述動(dòng)力學(xué)模型,計(jì)算赫茲接觸下轉(zhuǎn)速為1 000 r/min和5 000 r/min時(shí)內(nèi)圈X方向的加速度頻域信號(hào),分別得出在79.35 Hz和393.7 Hz處分別出現(xiàn)峰值,與理論公式[27]計(jì)算結(jié)果基本相符,驗(yàn)證了模型的有效性。
(15)
3.2 滾動(dòng)軸承振動(dòng)特性分析
為探究滑移非理想赫茲接觸下對(duì)軸承振動(dòng)特性的影響規(guī)律,通過對(duì)比滑移和赫茲接觸下軸承振動(dòng)信號(hào)的均方根值(RMS)和峰-峰值(PTP),分析載荷、轉(zhuǎn)速對(duì)軸承內(nèi)圈振動(dòng)信號(hào)的影響規(guī)律;同時(shí)進(jìn)一步從滑移接觸特性的角度分析了不同工況下軸承的振動(dòng)特性。
表4為內(nèi)圈X方向振動(dòng)信號(hào)的均方根值(RMS)和峰-峰值(PTP),從表中可以看出在低、中速工況,滑移接觸下軸承振動(dòng)的RMS值和PTP值大于赫茲理論;但在高速工況,滑移接觸振動(dòng)信號(hào)的時(shí)域指標(biāo)值較小;同時(shí)在高速工況,RMS和PTP值隨載荷增大而減小。即在中、低速工況,赫茲接觸下軸承的振動(dòng)能量小于滑移接觸;而在高速工況,赫茲接觸下軸承振動(dòng)能量大于滑移接觸,且隨載荷的增加,軸承振動(dòng)能量隨之減小。在低、中速工況,軸承內(nèi)部運(yùn)行穩(wěn)定,結(jié)合式(8)可以得出考慮滑移接觸下滾子與滾道接觸變形值增大,接觸應(yīng)力相應(yīng)增大,故滑移接觸下滾子與滾道發(fā)生碰撞的振動(dòng)能量更大;而高速工況,由于阻尼力和滑移接觸剛度的共同作用,對(duì)軸承內(nèi)圈的動(dòng)態(tài)效應(yīng)具有明顯的抑制作用,因此,滑移接觸下滾動(dòng)軸承的振動(dòng)能量較低。
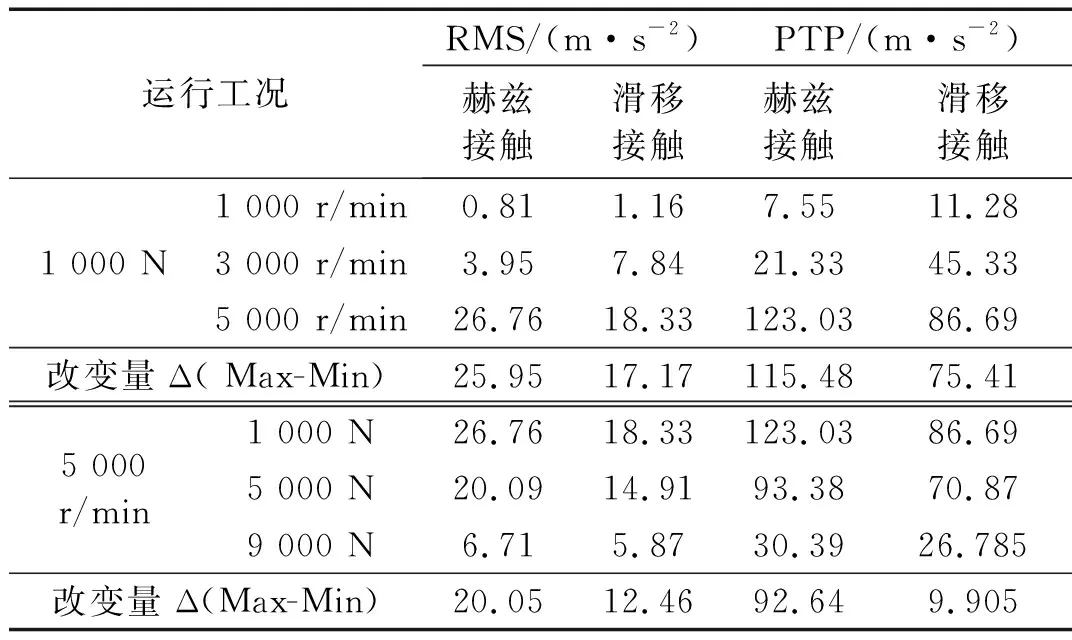
表4 內(nèi)圈加速度信號(hào)RMS和PTP值Tab.4 RMS and PTP value of inner ring acceleration signal
結(jié)合表4同樣可以觀察出,隨工況的改變,滑移接觸下RMS和PTP的改變量Δ小于赫茲接觸,即滑移接觸下軸承振動(dòng)隨工況改變的影響較小。滑移接觸下的接觸剛度kh和接觸指數(shù)nh增加,這可能是導(dǎo)致滑移接觸對(duì)工況改變敏感度較低的原因。滑移接觸系數(shù)實(shí)質(zhì)上是考慮滾子與滾道之間相對(duì)滑動(dòng),通過理論分析和有限元模型計(jì)算獲得,從其特征參數(shù)不能直觀反映滑移接觸對(duì)軸承振動(dòng)特性的影響規(guī)律,因此為進(jìn)一步從接觸特性的角度分析,針對(duì)低速輕載、高速輕載和高速重載三種工況對(duì)軸承振動(dòng)特性進(jìn)行對(duì)比分析。
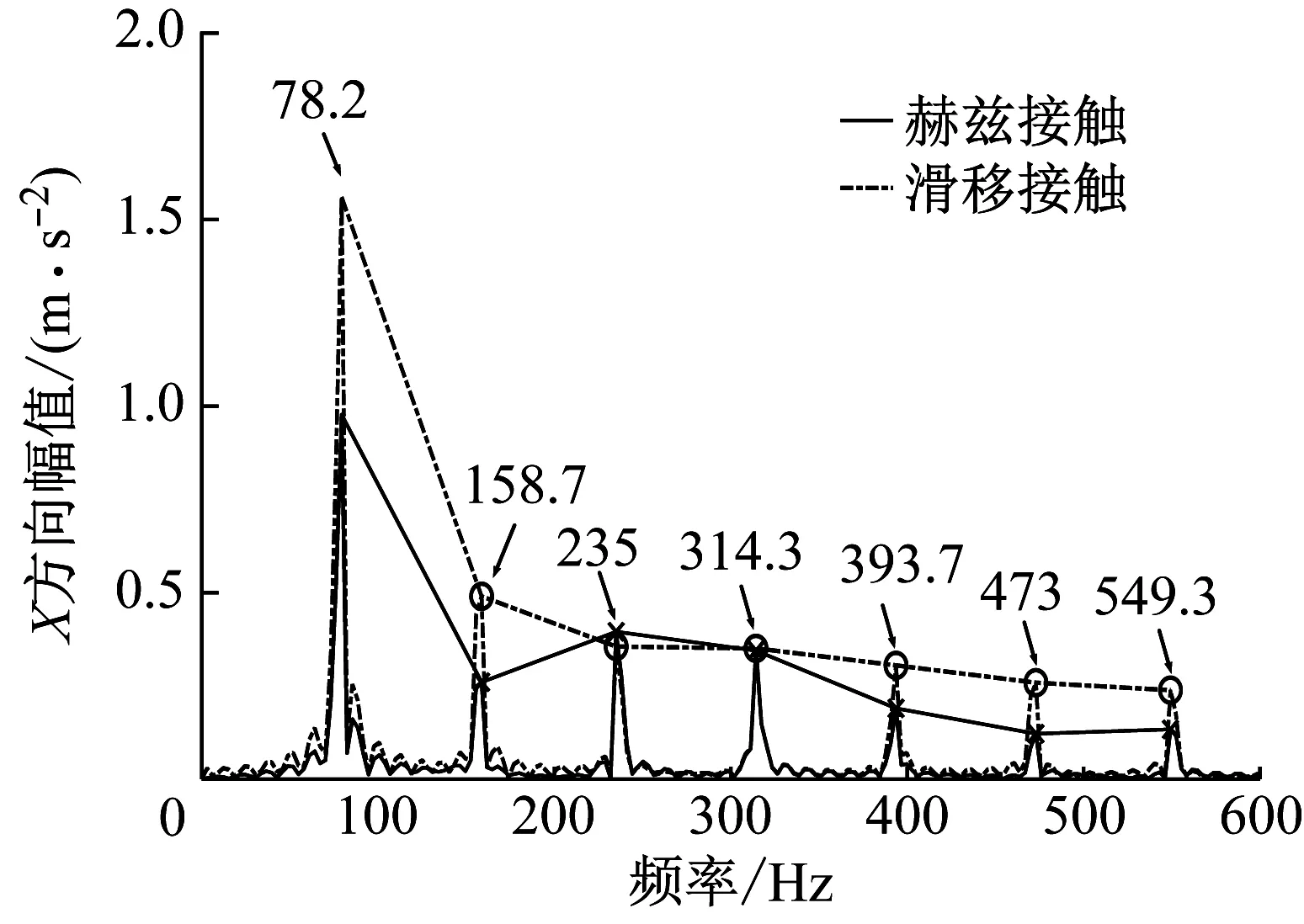
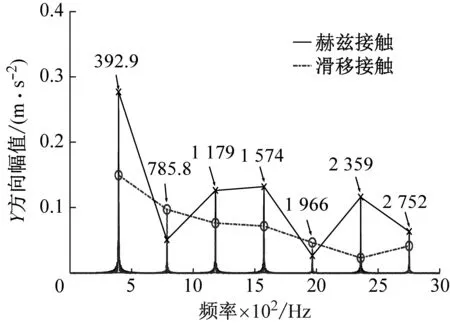
低速輕載工況下,軸承振動(dòng)信號(hào)時(shí)、頻對(duì)比,如圖9和10所示。從圖9(a)、(b)中可以看出,滑移接觸軸承X、Y方向的振動(dòng)幅值比赫茲接觸大,且振動(dòng)信號(hào)存在滯后現(xiàn)象。對(duì)振動(dòng)指標(biāo)RMS值和PTP值的分析中得出:低速輕載工況,軸承內(nèi)部運(yùn)行穩(wěn)定,滑移接觸下軸承振動(dòng)能量大于赫茲接觸,因此,滑移接觸下軸承X、Y方向的振動(dòng)幅值也較大;滑移接觸下軸承振動(dòng)信號(hào)滯后的原因是滑移剛度和滑移指數(shù)改變,而滑移系數(shù)是由于滾子與滾道發(fā)生滑移導(dǎo)致,因此,從滑移接觸特性的角度可以分析出滾子與滾道的滑移形成的滑移區(qū),即滾子在滑移區(qū)與內(nèi)、外圈發(fā)生相對(duì)滑動(dòng),滾子與滾道接觸時(shí)間增加,故滑移接觸下軸承振動(dòng)信號(hào)會(huì)存在滯后現(xiàn)象。圖10可以看出,滑移接觸下X、Y方向振動(dòng)信號(hào)的頻率成分較穩(wěn)定,進(jìn)一步說明滾子與滾道發(fā)生滑移接觸時(shí),接觸時(shí)間增加,使得內(nèi)圈與滾子發(fā)生碰撞前,存在緩沖區(qū),故滑移接觸下內(nèi)圈的振動(dòng)信號(hào)變得更加平緩。

(a) X方向加速度響應(yīng)對(duì)比
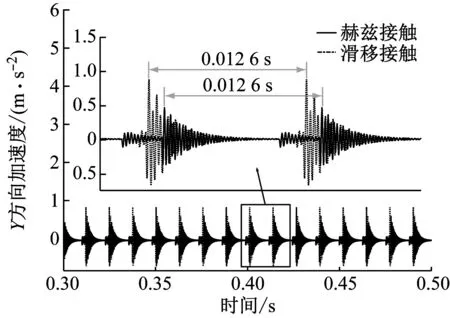
(b) Y方向加速度響應(yīng)對(duì)比圖9 1 000 r/min-1 000 N軸承內(nèi)圈振動(dòng)響應(yīng)Fig.9 Vibration response of bearing inner ring of 1 000 r/min-1 000 N
(a) X方向頻譜對(duì)比

(b) Y方向頻譜對(duì)比圖10 1 000 r/min-1 000 N軸承振動(dòng)頻譜Fig.10 Bearing vibration spectrum of 1 000 r/min-1 000 N
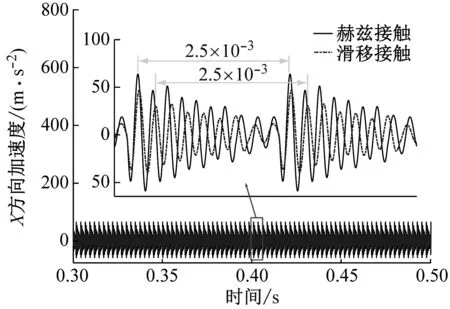
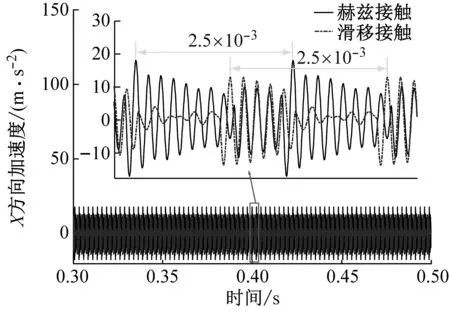
在高速輕載工況中,軸承內(nèi)圈X、Y方向振動(dòng)信號(hào)的時(shí)、頻域圖對(duì)比,如圖11和12所示。從圖11(a)、(b)可以看出,在高速輕載工況下,赫茲接觸的振動(dòng)信號(hào)的幅值比滑移接觸大,且滑移接觸產(chǎn)生的信號(hào)滯后現(xiàn)象并不明顯。在高速工況中,由于油膜阻尼力、滑移剛度、慣性力等作用,對(duì)軸承動(dòng)態(tài)效應(yīng)的抑制效果增強(qiáng),故滑移接觸下振動(dòng)信號(hào)幅值較弱。從接觸角度分析,滾子公轉(zhuǎn)轉(zhuǎn)速增加,滾子經(jīng)過滑移區(qū)的時(shí)間明顯縮短,因此滑移接觸下振動(dòng)信號(hào)的滯后時(shí)間明顯縮短。圖12(a)、(b)中可以看出在中低頻段,赫茲接觸頻率衰減速度明顯比滑移接觸快,進(jìn)一步說明考慮滑移接觸下的內(nèi)圈振動(dòng)信號(hào)會(huì)更穩(wěn)定,且衰減程度更平緩。對(duì)比圖12與圖10中軸承振動(dòng)幅值,可以看出高速工況下,軸承振動(dòng)信號(hào)幅值較大,這是由于軸承在低速輕載工況下運(yùn)行較穩(wěn)定,當(dāng)內(nèi)圈轉(zhuǎn)速為5 000 r/min時(shí),軸承的動(dòng)態(tài)特性會(huì)明顯增強(qiáng),故高速工況下軸承X、Y方向振動(dòng)幅值更大。
(a) X方向加速度響應(yīng)對(duì)比

(b) Y方向加速度響應(yīng)對(duì)比圖11 5 000 r/min-1 000 N軸承內(nèi)圈振動(dòng)響應(yīng)Fig.11 Vibration response of bearing inner ring of 5 000 r/min-1 000 N

(a) X方向頻譜對(duì)比
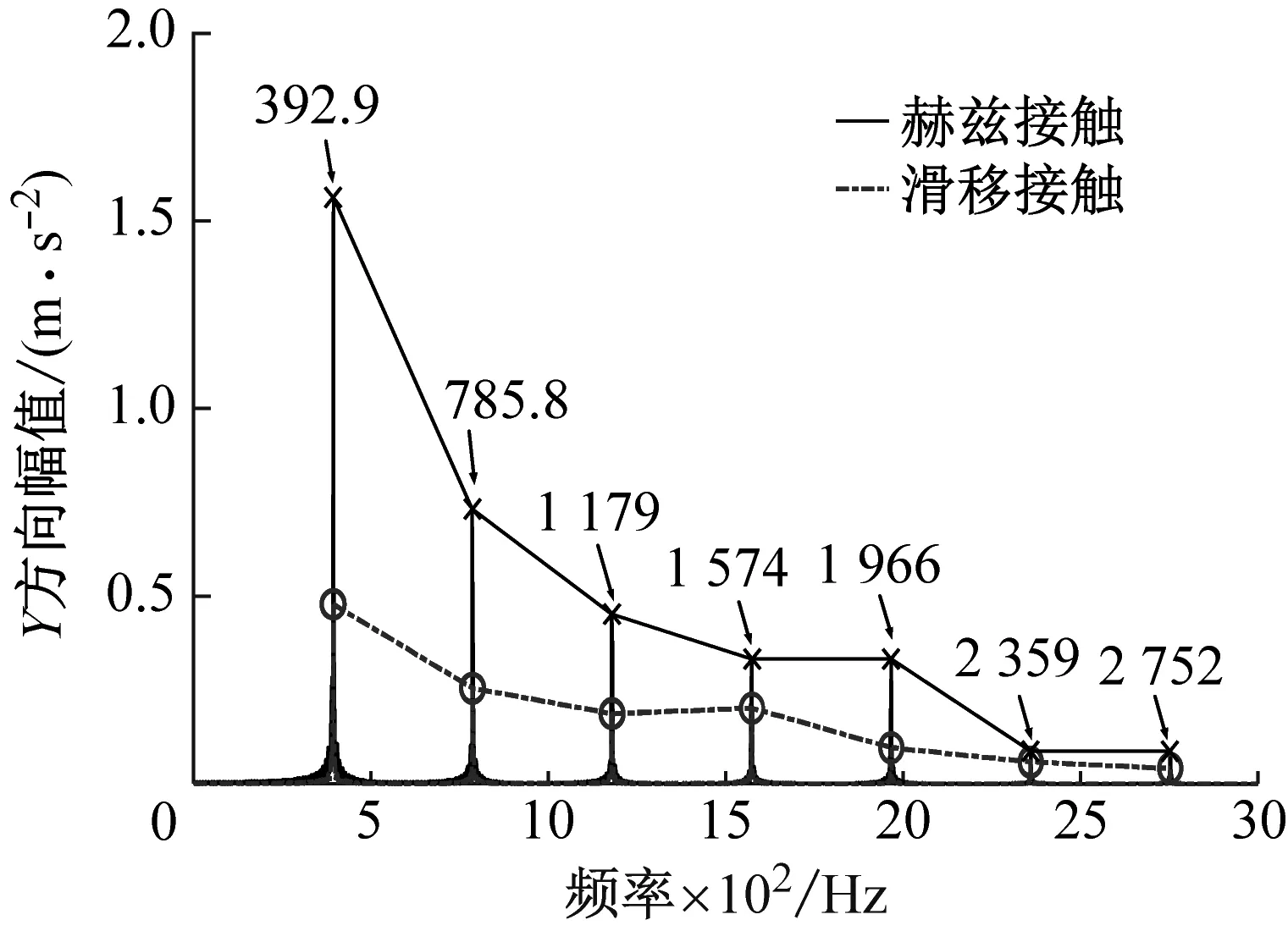
(b) Y方向頻譜對(duì)比圖12 5 000 r/min-1 000 N軸承振動(dòng)頻譜Fig.12 Bearing vibration spectrum of 5 000 r/min-1 000 N
高速重載工況下軸承振動(dòng)信號(hào)的時(shí)、頻域?qū)Ρ龋鐖D13、圖14所示。從圖13可以看出,滑移接觸下軸承X、Y方向振動(dòng)信號(hào)幅值較小,同時(shí)存在明顯滯后現(xiàn)象。考慮到在高速重載工況中軸承運(yùn)動(dòng)特性復(fù)雜,滑移接觸剛度對(duì)滾動(dòng)軸承內(nèi)圈運(yùn)動(dòng)的抑制效果明顯,故滑移接觸下軸承內(nèi)圈X、Y方向上的振動(dòng)信號(hào)幅值較低;同時(shí)由于外加載荷增大,滾子與滾道接觸斑面積增大,滾子經(jīng)過滑移區(qū)時(shí)間會(huì)明顯增加,因此,滾子與滾道發(fā)生碰撞的振動(dòng)信號(hào)會(huì)出現(xiàn)明顯滯后現(xiàn)象。從圖14(a)、(b)可以看出X、Y方向的振動(dòng)頻率成分不穩(wěn)定,這是由于高速重載工況下,軸承各部件的運(yùn)動(dòng)狀態(tài)更為復(fù)雜,使得軸承內(nèi)圈在X、Y方向上的動(dòng)態(tài)特性趨向不穩(wěn)定。對(duì)比圖12與圖14,可以看出高速重載工況中,軸承內(nèi)圈X、Y方向的振動(dòng)信號(hào)幅值有明顯降低,這是由于轉(zhuǎn)速相同,外加載荷增加使得軸承內(nèi)部的動(dòng)態(tài)效應(yīng)減弱,故重載工況下的內(nèi)圈振動(dòng)幅值較低。
(a) X方向加速度響應(yīng)對(duì)比

(b) Y方向加速度響應(yīng)對(duì)比圖13 5 000 r/min-9 000 N軸承內(nèi)圈振動(dòng)響應(yīng)Fig.13 Vibration response of bearing inner ring of 5 000 r/min-9 000 N

(a) X方向頻譜對(duì)比
(b) Y方向頻譜對(duì)比圖14 5 000 r/min-9 000 N軸承振動(dòng)頻譜Fig.14 Bearing vibration spectrum of 5 000 r/min-9 000 N
5 結(jié) 論
本文以NU306圓柱滾子軸承為研究對(duì)象,從理論上分析滾子與滾道的滑移接觸特性,并推導(dǎo)了滑移非理想赫茲接觸下的載荷-變形公式。以ANSYS中LS-DYNA為平臺(tái),獲得滑移接觸下的接觸剛度和變形指數(shù),并通過建立滾動(dòng)軸承動(dòng)力學(xué)模型,對(duì)比分析了不同工況滑移接觸和赫茲接觸下軸承的振動(dòng)特性,主要結(jié)論如下:
(1) 滑移接觸下,滾子與滾道之間存在摩擦力與切應(yīng)力的作用,滾子與滾道接觸面增大,故接觸變形大于理想赫茲接觸下的接觸變形,且在重載工況,與赫茲接觸的變形值偏差更為明顯。
(2) 在中低速工況,滑移接觸引起的變形更大,滾子與滾道之間接觸力增大,故軸承的振動(dòng)沖擊能量要大于赫茲接觸;而在高速工況,由于剛度和阻尼力等作用,滑移接觸下軸承振動(dòng)信號(hào)的幅值和能量較低。
(3) 在低速輕載工況,滑移接觸存在滑移區(qū),軸承振動(dòng)信號(hào)存在滯后現(xiàn)象,而隨轉(zhuǎn)速升高,滾子經(jīng)過滑移區(qū)時(shí)間縮短,振動(dòng)信號(hào)滯后現(xiàn)象減弱;而在重載工況,接觸斑增大,滾子在接觸區(qū)時(shí)間增加,滑移接觸下振動(dòng)信號(hào)存在明顯滯后。
(4) 考慮滑移非理想赫茲接觸對(duì)軸承振動(dòng)特性的研究與理想赫茲接觸存在明顯的差異,滑移非理想赫茲接觸進(jìn)一步考慮接觸面間相對(duì)滑移的作用,與實(shí)際工況更貼近。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
中華詩詞(2020年1期)2020-09-21 09:24:52
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
小學(xué)生作文(中高年級(jí)適用)(2018年5期)2018-06-11 01:22:56
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
數(shù)學(xué)大王·中高年級(jí)(2016年12期)2016-12-26 21:37:36
