激光測(cè)距雷達(dá)在剪叉式高空作業(yè)平臺(tái)安全監(jiān)測(cè)方面的研究及應(yīng)用
2023-03-20 08:18:54中建三局第一建設(shè)工程有限責(zé)任公司吳凡吳善滸宋興彬
中國(guó)建設(shè)信息化 2023年5期
關(guān)鍵詞:設(shè)備
文|中建三局第一建設(shè)工程有限責(zé)任公司 吳凡 吳善滸 宋興彬
隨著現(xiàn)代社會(huì)科學(xué)技術(shù)的發(fā)展,剪叉式高空作業(yè)平臺(tái)(簡(jiǎn)稱“高空車”)已經(jīng)普及到社會(huì)生活的各個(gè)角落,運(yùn)用越來(lái)越廣泛,不管是建筑,土木工程,及人們的日常生活都離不開剪叉式高空作業(yè)平臺(tái)。在工程項(xiàng)目中已經(jīng)廣泛應(yīng)用剪叉式高空作業(yè)平臺(tái)以取代傳統(tǒng)的操作平臺(tái),尤其在機(jī)電安裝、裝飾裝修方面。近幾年,因高空車違規(guī)操作引發(fā)的安全事故頻發(fā)。大多是因?yàn)椴僮魅藛T誤操作導(dǎo)致的,如:(1)上升過(guò)程中作業(yè)人員身體超出護(hù)欄導(dǎo)致碰撞擠壓;(2)車輛超速制動(dòng)不及時(shí)導(dǎo)致車輛人員碰撞;(3)將作業(yè)車作為管道頂升裝置導(dǎo)致升降車超載; (4)作業(yè)車在不平整場(chǎng)地上升導(dǎo)致設(shè)備傾倒等;安全形勢(shì)日益嚴(yán)峻,提高設(shè)備安全系數(shù)迫在眉睫。
在國(guó)內(nèi)剪叉式高空車作業(yè)平臺(tái)領(lǐng)域,為了改善這一安全隱患,設(shè)備廠家已研發(fā)出了高空車限位桿,在限位桿頂端安裝行程開關(guān),通過(guò)控制線纜連接至高空車控制系統(tǒng)。限位桿安裝在操作平臺(tái)護(hù)欄上,當(dāng)行程開關(guān)接觸到障礙物后,會(huì)傳輸開關(guān)量信號(hào)給高空車控制系統(tǒng)以控制設(shè)備的急停,從而確保作業(yè)人員的安全。但限位桿使用過(guò)程中存在較明顯缺陷:(1)限位桿行程開關(guān)屬于易損器件,容易損壞;(2)限位桿長(zhǎng)度安裝高度一般在1.8m左右,為保障作業(yè)過(guò)程安全可靠,一臺(tái)高空車通常至少安裝2 條限位桿(操作平臺(tái)的對(duì)角),限制了施工作業(yè)的操作空間;(3)限位桿分為內(nèi)桿及外桿,內(nèi)桿可以進(jìn)行伸縮,在設(shè)備停用時(shí)會(huì)將內(nèi)桿收到外桿內(nèi),而施工作業(yè)人員往往因?yàn)榘踩庾R(shí)薄弱,在再次啟動(dòng)時(shí)忽略使用限位桿。本技術(shù)目的在于研發(fā)一個(gè)基于激光測(cè)距雷達(dá)[1]的安全監(jiān)測(cè)設(shè)備,用以有效的提高設(shè)備操作安全系數(shù),減少安全事故的發(fā)生。
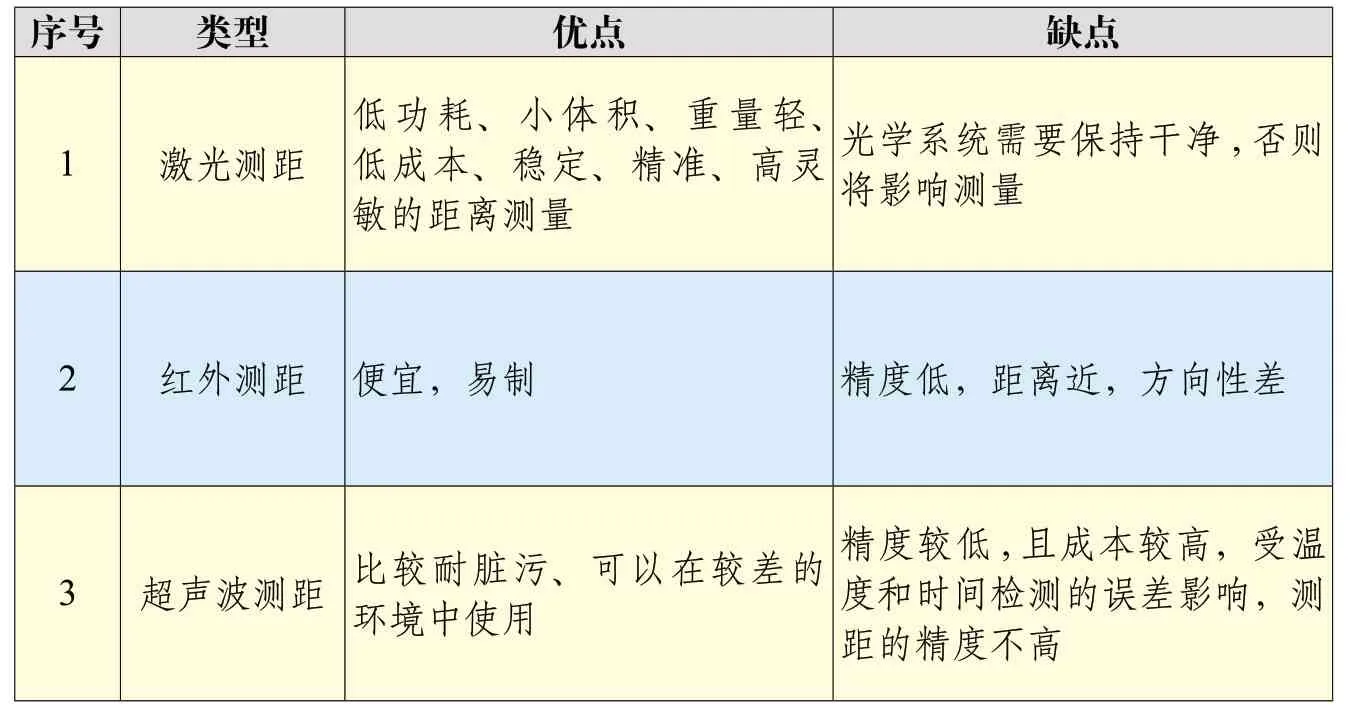
表1 單點(diǎn)激光測(cè)距優(yōu)勢(shì)
1.激光測(cè)距雷達(dá)優(yōu)勢(shì)
建筑施工現(xiàn)場(chǎng)安全第一,結(jié)合實(shí)際應(yīng)用環(huán)境以及性價(jià)比,單點(diǎn)激光測(cè)距雷達(dá)效果最佳,但需設(shè)防水防塵措施保障光學(xué)系統(tǒng)的清潔。
360°激光測(cè)距雷達(dá)的工作方式:首先由發(fā)射機(jī)發(fā)射一束特定功率的激光束,經(jīng)過(guò)大氣傳輸輻射到目標(biāo)表面上,反射的回波由接收裝置接收,再對(duì)回波信號(hào)進(jìn)行處理,提取有用信息。通過(guò)測(cè)量反射、散射回波信號(hào)的時(shí)間間隔、頻率變化、波束所指方向等就可以確定目標(biāo)的距離、方位和速度等信息,然后結(jié)合激光器本身的位置信息和姿態(tài)角度信息,準(zhǔn)確計(jì)算出目標(biāo)表面回波點(diǎn)的三維坐標(biāo)。
360°激光測(cè)距優(yōu)勢(shì):目前廣泛應(yīng)用的為激光測(cè)距雷達(dá),廣泛應(yīng)用于機(jī)器人定位與避障、工業(yè)快速精準(zhǔn)測(cè)繪、環(huán)境掃描等領(lǐng)域,可實(shí)現(xiàn)360°全方位掃描,測(cè)量半徑長(zhǎng),數(shù)據(jù)密度大、數(shù)據(jù)精度高、性價(jià)比高,穩(wěn)定可靠的優(yōu)點(diǎn)。
2.激光測(cè)距雷達(dá)在剪叉式高空作業(yè)平臺(tái)安全監(jiān)測(cè)方面的研究及應(yīng)用
激光雷達(dá)的應(yīng)用范圍廣闊,我國(guó)激光雷達(dá)的下游市場(chǎng)主要集中在無(wú)人駕駛和勘探測(cè)繪領(lǐng)域。激光雷達(dá)應(yīng)用在無(wú)人駕駛領(lǐng)域,可以識(shí)別障礙物,保障行駛安全,隨著無(wú)人駕駛市場(chǎng)的蓬勃發(fā)展,車載激光雷達(dá)市場(chǎng)發(fā)展迅速,但在剪叉式高空車作業(yè)平臺(tái)領(lǐng)域,國(guó)內(nèi)各廠家設(shè)備均無(wú)安全限位緊急制動(dòng)功能,僅具備超載、傾斜的報(bào)警功能,無(wú)法有效的防范安全事故的發(fā)生。
綜合以上考慮,對(duì)剪叉式高空作業(yè)平臺(tái)安全監(jiān)測(cè)設(shè)備進(jìn)行研究,探討了通過(guò)激光測(cè)距雷達(dá)技術(shù)對(duì)周圍障礙物進(jìn)行監(jiān)測(cè)的實(shí)施方案,以實(shí)現(xiàn)監(jiān)測(cè)設(shè)備的便捷性、準(zhǔn)確性、可靠性。
2.1 研究?jī)?nèi)容
通過(guò)在底座對(duì)角安裝兩個(gè)360°激光測(cè)距雷達(dá),測(cè)量高空車水平方向距周圍墻體、障礙物的距離;在工作平臺(tái)上四角分別安裝四個(gè)單點(diǎn)激光測(cè)距雷達(dá),測(cè)量欄桿距離上方障礙物的距離。進(jìn)入到危險(xiǎn)距離內(nèi)進(jìn)行自動(dòng)報(bào)警同時(shí)車輛緊急制動(dòng);實(shí)現(xiàn)自動(dòng)避障的功能。
2.2 研究的關(guān)鍵技術(shù)
(1)單點(diǎn)激光測(cè)距雷達(dá)的應(yīng)用
單點(diǎn)激光測(cè)距雷達(dá)用于測(cè)量剪叉車護(hù)欄距離上方障礙物的距離,因其具有體積小、重量輕的特點(diǎn),可以直接裝在作業(yè)平臺(tái)上面也不會(huì)對(duì)操作人員造成影響,故在作業(yè)平臺(tái)上四角分別安裝四個(gè)單點(diǎn)激光測(cè)距雷達(dá),用自制的防塵防水保護(hù)殼進(jìn)行固定及防護(hù),電源線路及控制線路通過(guò)剪叉車臂接入安裝在底座上的集成電路系統(tǒng)。進(jìn)入到危險(xiǎn)距離內(nèi)進(jìn)行自動(dòng)報(bào)警同時(shí)車輛緊急制動(dòng);實(shí)現(xiàn)自動(dòng)避障的功能。單點(diǎn)激光測(cè)距雷達(dá)結(jié)構(gòu)圖如圖1所示。
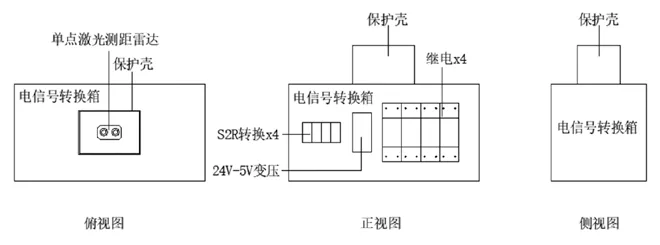
圖1 單點(diǎn)激光測(cè)距雷達(dá)結(jié)構(gòu)圖
(2)360°激光測(cè)距雷達(dá)的應(yīng)用
通過(guò)在剪叉車底座對(duì)角安裝兩個(gè)360°激光測(cè)距雷達(dá),可以實(shí)現(xiàn)對(duì)水平方向上障礙物的監(jiān)測(cè),有效避免安全事故的發(fā)生,但是360°激光測(cè)距雷達(dá)屬于精密設(shè)備,容易受到太陽(yáng)光、污漬灰塵的影響導(dǎo)致測(cè)量數(shù)據(jù)不準(zhǔn),而且因?yàn)樽鳂I(yè)環(huán)境的影響外殼容易碰撞損壞,特設(shè)計(jì)適用于剪叉式登高作業(yè)車360°激光測(cè)距雷達(dá)的保護(hù)裝置,材質(zhì)采用鍍鋅鋼,不易損壞不易腐蝕,保護(hù)裝置僅留出激光發(fā)射返回的一點(diǎn)高度,其他地方可以有效的包圍住,可以極大減少太陽(yáng)光的折射,也可以減少污漬灰塵的污染,建構(gòu)簡(jiǎn)便,方標(biāo)拆卸修理。激光測(cè)距雷達(dá)保護(hù)裝置結(jié)構(gòu)如圖2所示。
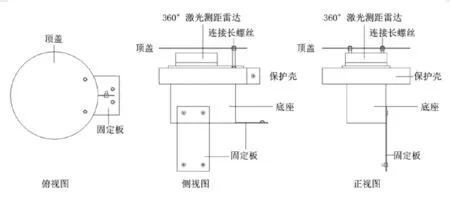
圖2 360°激光測(cè)距雷達(dá)結(jié)構(gòu)圖
該裝置包括:頂蓋、保護(hù)殼、底座、固定板四大部分。頂蓋與360°激光測(cè)距雷達(dá)通過(guò)長(zhǎng)螺絲鏈接固定,頂蓋可根據(jù)應(yīng)用環(huán)境做調(diào)整,在室內(nèi)情況下平面頂蓋即可,在室外條件下頂蓋邊緣向下微彎,可以起到防雨的作用,根據(jù)與360°激光測(cè)距雷達(dá)底部形狀及凸起在底座上做出相應(yīng)形狀用來(lái)固定360°激光測(cè)距雷達(dá),保護(hù)殼在360°激光測(cè)距雷達(dá)外圍圍成一圈后通過(guò)螺絲將其擰緊,保護(hù)殼在靠近電源一側(cè)會(huì)預(yù)留接線孔供電線接入,保護(hù)殼與底座通過(guò)玻璃膠固定,底座與剪叉式高空作業(yè)車通過(guò)固定板及螺絲固定在一起。
(3)單片機(jī)的應(yīng)用
現(xiàn)有360°激光測(cè)距雷達(dá)只能測(cè)繪圖形,無(wú)法輸出電信號(hào),需要設(shè)計(jì)單片機(jī)將測(cè)繪圖形轉(zhuǎn)換為電信號(hào)以此來(lái)控制設(shè)備的急停。選用STM32F103C8T6 系統(tǒng)板作為主板,通過(guò)Keil uVision5 軟件進(jìn)行單片機(jī)編程,設(shè)定360°激光測(cè)距雷達(dá)的掃描范圍,每個(gè)雷達(dá)掃描角度為220°,將掃描范圍細(xì)分為100 個(gè)點(diǎn),讀取100 個(gè)點(diǎn)的距離數(shù)據(jù),達(dá)到設(shè)定值后輸出開關(guān)信號(hào)。單片機(jī)設(shè)計(jì)流程圖如圖3所示。
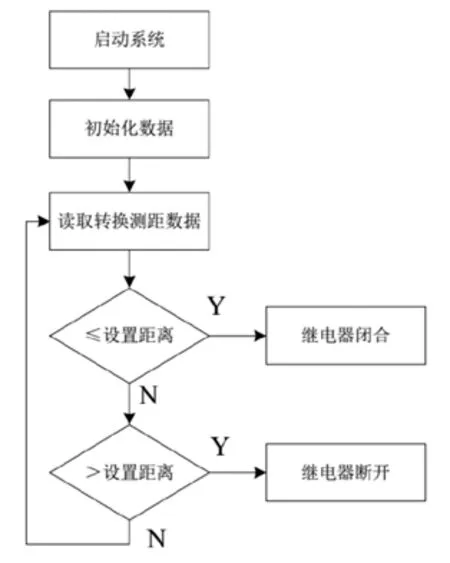
圖3 單片機(jī)設(shè)計(jì)流程圖
(4)集成電路系統(tǒng)的設(shè)計(jì)
將各種傳感器信號(hào)、各模塊集成到類似配電箱的集成系統(tǒng),實(shí)現(xiàn)信息的轉(zhuǎn)換、傳輸。需要選擇匹配的傳輸接口,設(shè)計(jì)可靠、穩(wěn)定的安裝方式方法。
本系統(tǒng)所設(shè)計(jì)的集成電路系統(tǒng)安裝在剪叉車底座上,集成系統(tǒng)主要包括單片機(jī)、單點(diǎn)激光雷達(dá)S2R 繼電器轉(zhuǎn)接板、繼電器、接線段子板等。通過(guò)單片機(jī)來(lái)實(shí)現(xiàn)360°激光測(cè)距雷達(dá)測(cè)繪地圖轉(zhuǎn)換為電開關(guān)量信號(hào),通過(guò)繼電器來(lái)控制設(shè)備啟停。通過(guò)單點(diǎn)激光雷達(dá)S2R 繼電器轉(zhuǎn)接板將單點(diǎn)雷達(dá)測(cè)量距離轉(zhuǎn)換為電開關(guān)量信號(hào)直接控制設(shè)備啟停。集成系統(tǒng)的電源取自底座內(nèi)的蓄電池,兩種雷達(dá)的控制線通過(guò)“或”邏輯串聯(lián)在一起,只要任一方向障礙物距離滿足報(bào)警要求,控制開關(guān)量就會(huì)改變,設(shè)備停止運(yùn)行。雷達(dá)監(jiān)測(cè)裝置安裝如圖4所示。
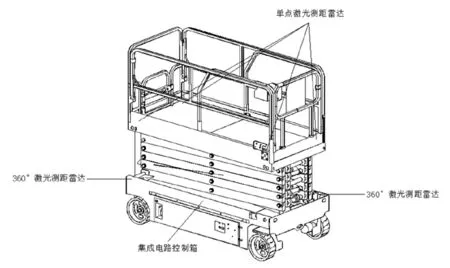
圖4 雷達(dá)監(jiān)測(cè)裝置安裝圖
2.3 研究成果
(1)豎直方向安全監(jiān)測(cè)精度達(dá)到±10mm
試驗(yàn)標(biāo)準(zhǔn)設(shè)定為:豎直方向操作平臺(tái)上方1.8m 為急停觸發(fā)距離。水平方向車體周圍1.5m 為急停觸發(fā)距離。要求誤差精度不大于10mm。
第一次測(cè)試結(jié)果,室內(nèi)測(cè)距精度可以滿足±10mm,室外測(cè)距產(chǎn)生誤判,設(shè)備開機(jī)即急停。
總結(jié)問(wèn)題:第一次試驗(yàn)單點(diǎn)激光測(cè)距雷達(dá)無(wú)任何遮光擋光設(shè)施,室外受強(qiáng)光影響,太陽(yáng)光射入激光接收器,影響系統(tǒng)對(duì)距離的判斷,導(dǎo)致誤觸發(fā)、開機(jī)即停機(jī)的情況。

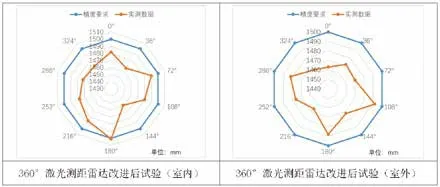
表2 單點(diǎn)激光測(cè)距雷達(dá)改進(jìn)后試驗(yàn)(室內(nèi))

表3 單點(diǎn)激光測(cè)距雷達(dá)改進(jìn)后試驗(yàn)(室外)
解決措施:在單點(diǎn)激光測(cè)距雷達(dá)周圍加設(shè)保護(hù)殼,用于遮光擋光以及防水防塵,僅在發(fā)射接收器上方留一個(gè)光源孔即可,保障光學(xué)系統(tǒng)靈敏度。
(2)水平方向安全監(jiān)測(cè)精度達(dá)到±50mm
以上車門為起始點(diǎn)0°,順時(shí)針?lè)较蛎?6°方向設(shè)一個(gè)測(cè)試點(diǎn),共10 個(gè)測(cè)試點(diǎn)。
第一次測(cè)試結(jié)果,室內(nèi)測(cè)距精度可以滿足±50mm,室外測(cè)距產(chǎn)生誤判,設(shè)備開機(jī)即急停。
總結(jié)問(wèn)題:(1)第一次試驗(yàn)360°激光測(cè)距雷達(dá)無(wú)任何遮光擋光設(shè)施,室外受強(qiáng)光影響,太陽(yáng)光射入激光接收器,影響系統(tǒng)對(duì)距離的判斷,導(dǎo)致開機(jī)即停機(jī)的情況;(2)單片機(jī)測(cè)距算法有誤,測(cè)量距離應(yīng)為障礙物距離車體距離而不是距離激光雷達(dá)的距離。
解決措施:在360°激光測(cè)距雷達(dá)周圍加設(shè)保護(hù)殼,用于遮光擋光以及防水防塵,保護(hù)裝置特分為上下兩部分,通過(guò)長(zhǎng)螺絲來(lái)進(jìn)行連接,中間留出光源掃描的空隙,保障光學(xué)系統(tǒng)靈敏度。修改單片機(jī)算法函數(shù),以車體為距離起始點(diǎn)。
360°激光測(cè)距雷達(dá)是通過(guò)激光順時(shí)針旋轉(zhuǎn)接收反射信號(hào)進(jìn)行測(cè)距的,旋轉(zhuǎn)過(guò)程需要一定時(shí)間,導(dǎo)致測(cè)距誤差變大,經(jīng)試驗(yàn),誤差精度在10-50mm 之間,多為負(fù)偏差。故單片機(jī)程序設(shè)置檢測(cè)距離時(shí),以大于急停觸發(fā)距離50mm 設(shè)置為宜。
2.4 工程應(yīng)用
激光測(cè)距雷達(dá)在剪叉式高空作業(yè)平臺(tái)安全監(jiān)測(cè)方面的研究及應(yīng)用,實(shí)現(xiàn)了對(duì)高空作業(yè)平臺(tái)安全使用情況的監(jiān)控,可以準(zhǔn)確的進(jìn)行避障報(bào)警,可以有效的提高設(shè)備使用的安全系數(shù),減少事故發(fā)生的概率。工程建設(shè)現(xiàn)場(chǎng)施工講究安全第一,“安全一松,全線告終”,安全事故會(huì)導(dǎo)致工地停工,事故理賠,公司停牌等直接或間接的影響,剪叉式高空作業(yè)平臺(tái)安全檢測(cè)設(shè)備能極大的降低安全事故發(fā)生率,為項(xiàng)目建設(shè)、順利履約提供了有力的支撐。
本技術(shù)自2021年6月至今同時(shí)應(yīng)用于公司三個(gè)在建項(xiàng)目,在用高空車全年平均為150 臺(tái)。相比于傳統(tǒng)的管理模式,在管理成本上面,可減少車輛管理人員80%的工作量,節(jié)省了4 個(gè)車輛管理人員,年節(jié)約費(fèi)用12*10000*4=48 萬(wàn)元,后期推廣至整個(gè)公司或集團(tuán)時(shí)將創(chuàng)造更大的經(jīng)濟(jì)效益。
經(jīng)實(shí)踐證明,剪叉式高空作業(yè)平臺(tái)安全監(jiān)測(cè)設(shè)備具有應(yīng)用方便、安裝便捷、使用環(huán)境廣泛、安全系數(shù)高的優(yōu)點(diǎn),可以切實(shí)減少安全事故的發(fā)生,對(duì)建筑行業(yè)向工業(yè)化、信息化發(fā)展起到了積極的作用,具有良好的推廣價(jià)值和應(yīng)用前景。
3.結(jié)語(yǔ)
通過(guò)對(duì)激光測(cè)距雷達(dá)在剪叉式高空作業(yè)平臺(tái)安全監(jiān)測(cè)方面的研究及應(yīng)用,研發(fā)出了剪叉式高空作業(yè)平臺(tái)安全監(jiān)測(cè)設(shè)備,可以有效的對(duì)周圍障礙物進(jìn)行監(jiān)測(cè),實(shí)現(xiàn)緊急避障的功能,經(jīng)多輪性能測(cè)試,剪叉式高空作業(yè)平臺(tái)安全監(jiān)測(cè)設(shè)備的監(jiān)測(cè)精度不大于±50mm,可以滿足施工現(xiàn)場(chǎng)使用要求。同時(shí)監(jiān)測(cè)設(shè)備可以通過(guò)調(diào)整保護(hù)裝置的材質(zhì)、形狀、防護(hù)等級(jí),以適應(yīng)施工現(xiàn)場(chǎng)復(fù)雜的應(yīng)用環(huán)境。本項(xiàng)技術(shù)的實(shí)施,可以有效提高設(shè)備使用的安全系數(shù),減少事故發(fā)生的概率,為項(xiàng)目的安全生產(chǎn)、順利履約提供有力支撐。
猜你喜歡
中國(guó)特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
當(dāng)代工人(2020年13期)2020-09-27 23:04:20
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(shù)(2017年11期)2017-12-20 08:10:57
工業(yè)設(shè)計(jì)(2016年12期)2016-04-16 02:52:00
IT時(shí)代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(yǎng)(2015年1期)2015-04-17 03:25:28
設(shè)備管理與維修(2015年12期)2015-04-09 06:57:00
