水下仿生側線感知研究進展
2023-03-18 01:51:10翟宇凡熊明磊謝廣明
水下無人系統學報 2023年1期
關鍵詞:研究
翟宇凡 ,熊明磊 ,王 晨 ,謝廣明 ,3*
(1.北京大學 工學院 智能仿生設計實驗室,北京,100871;2.北京大學 軟件工程國家工程研究中心,北京,100871;3.北京大學 海洋研究院,北京,100871)
0 引言
作為海洋大國,我國擁有豐富的海洋資源。自從黨的十八大報告中提出“建設海洋強國”戰略需求以來,國內海洋裝備發展獲得前所未有的重視,特別是針對水下機器人的研究變得非常活躍。
隨著先進制造與人工智能技術的飛速發展,機器人可以完成越來越多的陸地工程任務,例如路徑規劃、自主巡航、資源探測與開采、群體協作等。相比之下,水下機器人面臨著極端復雜的工作環境,如復雜的水流運動與水底結構、高壓環境、低能見度、海水的腐蝕性以及對儀器設備的干擾等,因此,發展水下機器人的難度遠高于陸地機器人。一方面,水下機器人無法憑借簡單的探測工具獲取周圍水環境信息;另一方面,對機器人的運動控制也會受到水流的巨大干擾。這些都是在海洋探索與開發過程中亟待解決的問題。
仿生機器人學是近年來的熱點研究問題之一。自然界中動植物的生理結構或行為特征能夠為研究人員設計機器人提供靈感。魚類在海洋中生活了數十億年,他們的身體結構不斷進化,行為不斷地適應著復雜的水下環境,最終呈現出如今的形態。在運動方面,魚類的游動具有機動性高、推進效率高、能量效率高等特征。在感知方面,水生生物特有的一種感知器官——側線能夠幫助它們獲取水下的壓強與流速信息,進而由神經系統進行行為決策。
以墨西哥盲魚為例(見圖1),它們長期生活于黑暗的水下洞穴環境中,視覺系統退化,但是仍然能夠憑借側線以及其他感官系統實現捕食等行為[1]。受此啟發,為了應對水下環境中聲吶傳感器的散射和多路徑傳播、光學傳感器在黑暗渾濁的海洋環境中的失明等問題[2],研究者們開發了由一系列傳感器組成的人工側線系統作為新型傳感系統,用于水下探測。相比于感知遠場聲波的聲吶系統,人工側線系統主要用于感知近場產生的局部流動,能夠彌補聲吶在近距離感知上的盲區。此外,隨著隱身技術的不斷發展,常規的傳感系統存在失效問題[3],而水下物體運動產生的流場變化幾乎是不可消除的,人工側線系統對于反隱身技術的發展有著重要意義。為了進一步提升人工側線系統的性能,完成各種各樣的水下任務,研究人員以仿生機器魚作為人工側線系統的載體,進行了一系列感知、控制實驗。文中以水下仿生側線感知為主題,綜述國內外研究現狀,并介紹筆者團隊在此領域的研究成果。

圖1 墨西哥盲魚Fig.1 Mexican blind fish
1 真實魚類側線感官
側線是水生生物皮膚感官中最高度分化的組織結構,能夠幫助生物在水下黑暗環境中感知壓強與速度信息,獲取周圍環境特征,實現捕食、集群等行為[4]。側線主要通過神經丘感受外界刺激,具體而言可以分為2 類: 表面神經丘和管道神經丘[5]。這2 種神經丘有著不同的生理結構,且經過億萬年的進化,在魚體表面呈現出各自特定的數目與分布特征(見圖2[6]),能夠獲取不同類型的環境信息,幫助生物體達到最好的感知效果[7]。
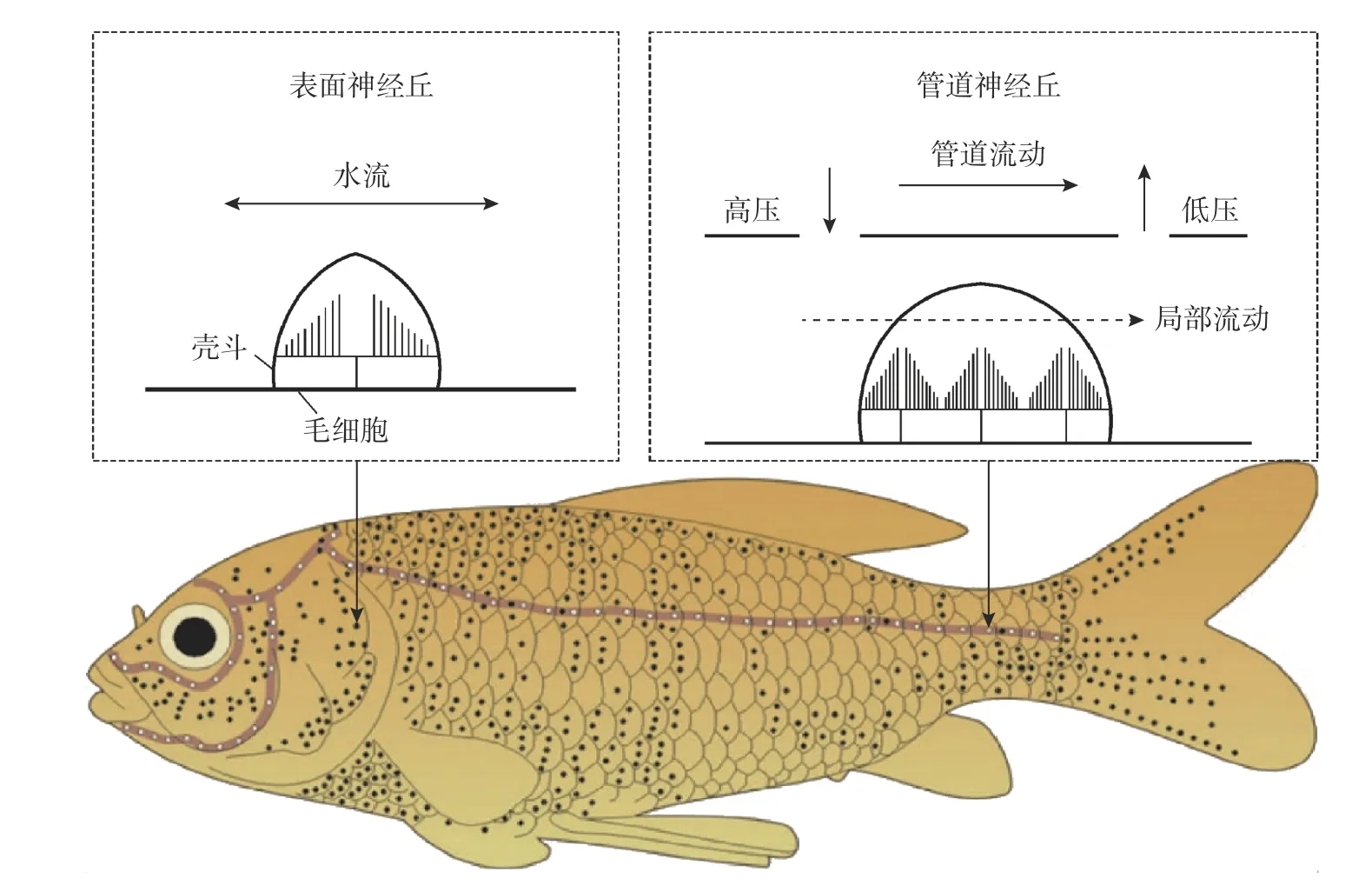
圖2 魚類側線神經丘結構與分布Fig.2 Structure and distribution of the neuromasts of the real fish lateral line
表面神經丘位于皮膚表面,具有一定的凸起結構,數目較多且較為分散,能夠幫助魚類感知水流流向與流速[8]。在物理模型中,表面神經丘可以表示為2 段首尾相連且彎曲剛度不同的梁(見圖3[9])。當生物體游動時,表面神經丘的梁結構在流速為U∞的水流作用下,沿z軸發生彎曲,撓度為v(z),位于皮膚下方的神經丘產生相應的神經沖動,進而傳遞到中樞神經系統進行處理,得到關于水流速度與方向的信息。表面神經丘靈敏度由撓度v(z)與水流速度U∞的相對大小關系決定[9]。
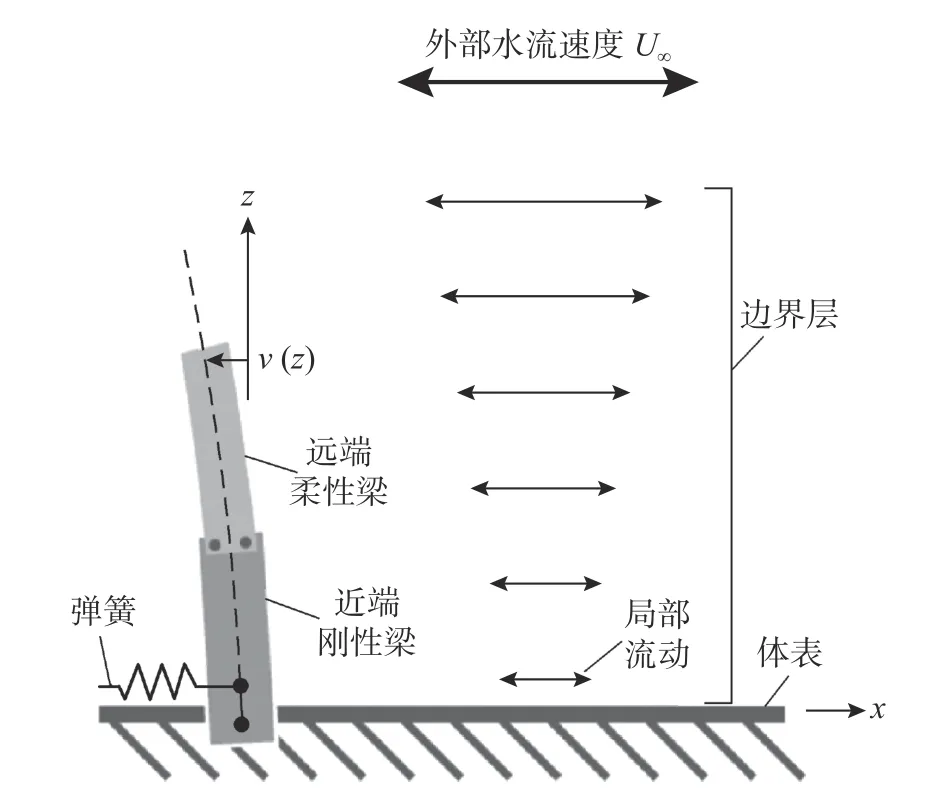
圖3 表面神經丘簡化物理模型Fig.3 Simplified physical model of superficial neuromast
管道神經丘在體表一般呈直線分布,位于表皮下的側線管中,側線管內充滿著粘液,并且與外界水環境通過小孔相通,能夠幫助魚類感知水下的壓強梯度[10]。具體的感知機理為: 外部流場的壓強差p1?p2通過小孔傳遞到側線管中,引起側線管中的局部流動,從而觸發管道神經丘產生神經沖動[11](見圖4[2])。
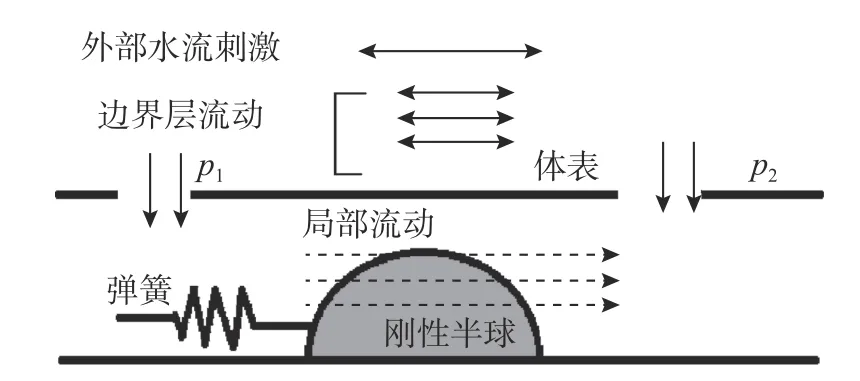
圖4 管道神經丘簡化物理模型Fig.4 Simplified physical model of canal neuromast
在這2 類神經丘的幫助下,魚類能夠充分地獲取外界流場的速度信息與壓強信息,再經由大腦實現對于這2 類信號的處理,即使處于黑暗環境,也能夠較好地感知水流信息,獲取周圍障礙、生物的位置,在水下更好地生存[12]。
2 基于不同感知原理的人工側線傳感器
為了克服聲學和光學原理在水下復雜環境中的失效問題,研究者們以真實側線為靈感,基于不同的傳感原理制作了多種用于水下檢測的人工側線傳感器,以此為單元設計出人工側線傳感器陣列,開展多種水下檢測研究,并與仿生機器魚結合進行感知與控制研究[13-14]。
現有的人工側線傳感器主要采用以下傳感方式模擬魚類的側線感知功能: 壓阻效應、壓電效應、電容效應、光學原理以及熱線式風速儀原理等,部分人工側線傳感器如圖5 所示。
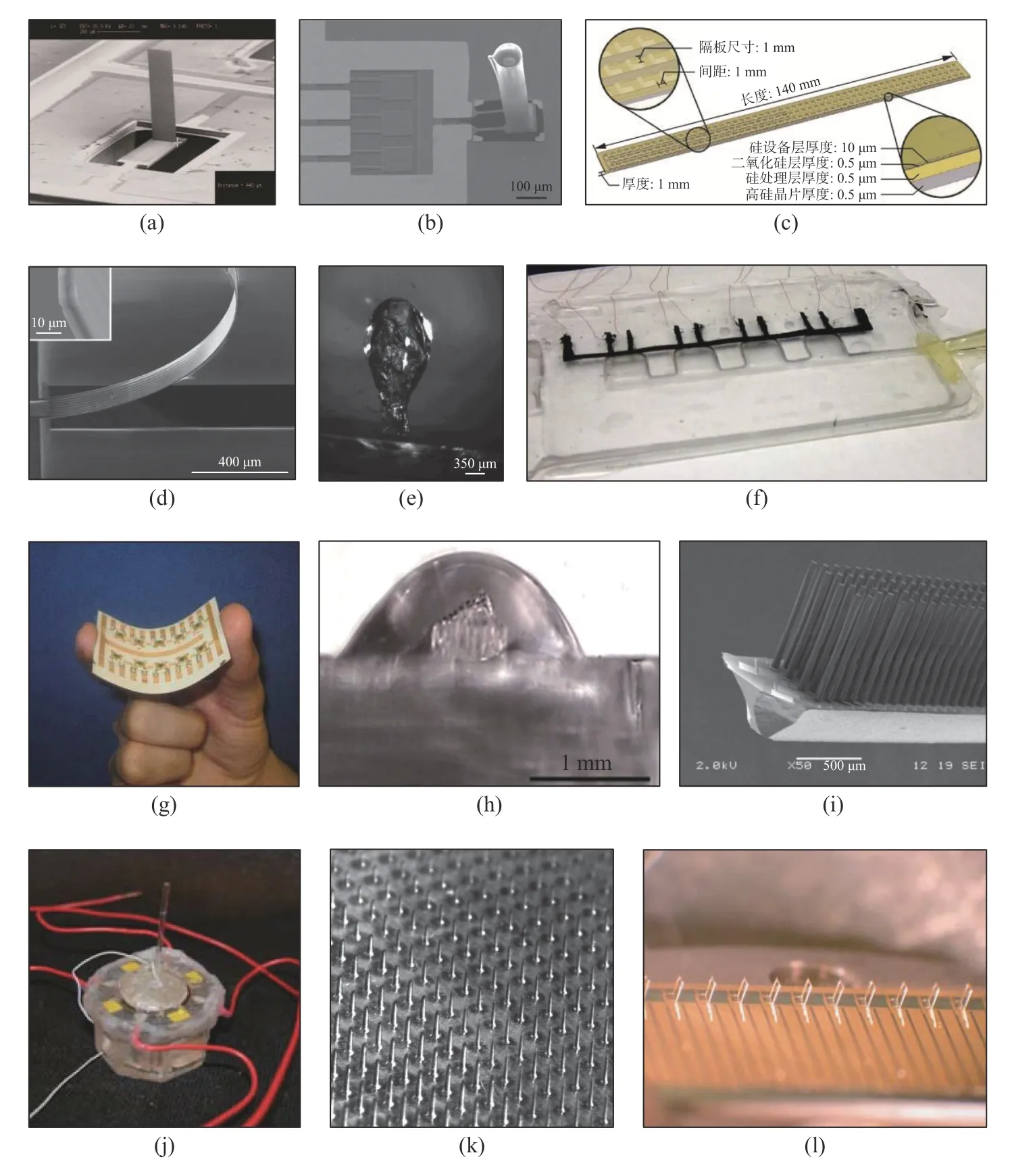
圖5 基于不同傳感原理的人工側線傳感器Fig.5 Several artificial lateral line sensors based on different sensing principles
2.1 壓阻效應
壓阻式傳感器主要基于半導體材料的壓阻效應感知外部信息。半導體材料受到外力后發生形變,電阻也會產生變化。通過設計合適的測量電路,讀取有關電學信息,能夠反推出壓強、張力等待測的力學量,進而得到水流的速度、壓強等信息。真實的側線由2 類神經丘組成,以此為靈感設計的壓阻式人工側線傳感器也可分為2 類,分別能夠測量水下的流速與壓強。
Fan 等[15]制造出第1 個壓阻式人工側線流速傳感器。該傳感器(見圖5(a))主要由1 根垂直的人造纖毛、1 個固定式的半導體自由懸臂和1 個應變儀組成。類似于魚類側線的感知機理,外部水流流經時,連接在懸臂自由端的纖毛產生彎曲,導致懸臂發生形變,位于懸臂梁底部的應變儀測量出這一形變大小,反映水流信息。該傳感器能夠測量流速范圍為0.1~1 m/s 的層流。后續的研究者將這一傳感器與熱線式風速儀進行對比,省略了懸臂設計,將纖毛直接連接在基板上,更加貼近真實側線的結構(見圖5(b))。這一改進設計使得傳感器能夠用于不同溫度條件與多種復雜流動下的流速檢測,提高了傳感器的適用范圍與穩定性,并且能夠大規模集成,用于分布式流量傳感[16]。此外,研究者們還從傳感器結構、半導體材料選擇、制作工藝等角度進行優化(見圖5(d)(e)),提高了人工側線流速傳感器的靈敏度、測量范圍及魯棒性等性能[17-26]。
人工側線流速傳感器主要基于懸臂或纖毛結構,而另一類用于測量壓強的人工側線傳感器主要采用平面結構設計,將壓阻器件直接安裝在基板上,檢測水下壓強場的分布與變化。Vicente 等[27]提出一種用于檢測方形和圓柱形障礙物的人工側線壓強傳感器陣列(見圖5(c))。該陣列由數百個微型壓強傳感器組成,這些傳感器都被集成在半導體材料上。該陣列的壓強檢測極限為1 Pa。除了集成現有的壓強傳感器外,研究者們還自主設計了多種用于人工側線系統的壓強傳感器,并將其通過一定的排列方式組合成傳感陣列(見圖5(f)),用于檢測水下的壓強信息以及物體信息。通過使用液晶聚合物等新型材料,傳感器的化學穩定性、密封性以及強度得到了大幅提升,能夠用于極其惡劣的深海環境[28-31]。
2.2 壓電效應
壓電效應是指特定材料在受到外力作用時表面上產生電荷,破壞原有電中性的現象。這種現象也為人工側線傳感器的研發提供了新的靈感。基于材料壓電效應的傳感器能夠通過收集電信息來感知來自外部環境的力學信息。Asadnia 等[32-33]制作了一款基于Pb(Zr0.52Ti0.48)O3薄膜材料的壓電式壓強傳感器(見圖5(g))。其采用立體光刻工藝,將聚合物纖毛連接在薄膜上,并且通過浮動電極來測量材料產生的壓電效應大小,進而得到纖毛感受的外部環境信息。并基于纖毛束結構設計了一款微型流量傳感器(見圖5(h)),其主要部件為用于感知外部信息的聚合物細絲與壓電納米纖維。該團隊使用精密滴鑄和膨脹工藝,在纖毛束周圍形成了一個圓頂狀水凝膠殼斗,提升了傳感器的穩定性。該傳感器的檢測閾值為8 μm/s[34]。此外,離子聚合物-金屬復合材料(IPMC)、聚偏二氟乙烯(PVDF)等壓電智能材料也能夠用于制作壓電式人工側線傳感器[35-36]。相比于壓阻式傳感器而言,壓電式傳感器元件能夠在外力作用下自主產生可測的電信號,不需要添加外部測量電路,因此體積較小,易于集成。
2.3 電容效應
電容器具有高靈敏度和低功耗的特點,因此也被應用到許多不同類型的傳感器中。電容式傳感器中最關鍵的組件是電容示值器,它能夠將外部刺激的作用效果轉換為電容的變化,從而提供了一種檢測水下壓強和流速的有效方法。類似于壓阻式傳感器,附著在基板上的纖毛在局部流動的作用下發生形變,進而改變基板電極間的距離,根據電容的變化信息就能夠得到外部流場的信息。Krijnen 等[37]受蟋蟀感知啟發,將纖毛連接到氮化硅薄膜上,薄膜間的鉻電極形成了可變的電容器(見圖5(i))。該傳感器的結構還可以進一步優化[38-39]。Stocking 等[40]受海豹觸須啟發制作了一種電容式晶須傳感器(見圖5(j))。將剛性人造晶須連接到錐型平行板電容器基座上,流場變化引起晶須形變,進而導致電容的變化。電容式傳感器能夠用于測量流場信息,但是嚴格來說,其結構和感知原理與魚類的側線并不相同。目前對于電容式傳感器的研究僅局限于傳感器的制作以及校準,并未有大量的實際應用研究。
2.4 光學原理與熱線式風速儀原理
光學原理與熱線式風速儀原理也在一定程度上推動了人工側線傳感器的發展。基于光學原理的傳感器具有類似于側線的纖毛結構,纖毛在水流中的彎曲可以通過紅外發光二極管等光學方法進行測量,進而推算水流速度(見圖5(k))[41-44]。熱線式風速儀是一種常用的測量儀器,主要結構為放置在流體中且被加熱過的金屬線,當有流體流經時,熱量的損失導致溫度和電阻的變化,進而可以通過電信號測量流體速度。研究者們基于這一原理制作了用于測量流場速度的傳感器陣列(見圖5(l))[45-48]。這2 類傳感器雖然能夠測量流場速度,用于水下檢測研究,但是與魚類的側線結構有著很大的差異,難以安裝到仿生機器魚載體上進行感知實驗探究。
2.5 小結
目前大部分的研究主要關注壓阻式傳感器的設計與優化。相比于其他傳感器,壓阻式傳感器在感知原理上最接近魚類的側線神經丘,制作工藝更加成熟,商業產品化程度更高,穩定性更好,因此,研究者們更多地會選擇基于壓阻效應的壓強傳感器與流速傳感器進行水流檢測研究,或者與仿生機器魚相結合。現有的人工側線傳感器已經能夠用于初步的水下探測研究,但是這些傳感器大多只是簡單模仿了魚類側線神經丘的結構,并不能深度還原具體的感知機理,在信息處理性能方面還有很大的差距。
為了更好地模擬真實的魚類側線,除了對于單個傳感器的設計之外,研究者們還對陣列中的傳感器數目、位置分布優化進行了深入的研究。針對各種流動問題(如均勻流、偶極子振蕩源產生的流動),基于勢流理論與保角變換計算特定翼型周圍的速度場與壓強場,從場的數據分布特征、系統經驗可觀測性等角度進行分析,提出一些描述傳感器性能的指標,如最優測度、對流速以及目標物體信息的估計誤差等,然后利用優化方法得到最優的傳感器數目以及位置分布,并且與真實魚類的側線分布進行了對比[49-53]。這一類研究探究的問題較為簡單,首先,勢流理論模型沒有考慮真實流動中的粘性效應;其次,保角變換只能探究特定外形周圍的流動,較難進行推廣;最后,對于一些較為復雜的非定常流動問題(例如魚體擺動前進時的流場感知),這種方法將極為復雜。為了更好地模擬真實流場,研究者們通過計算流體動力學(computational fluid dynamics,CFD)仿真以及實驗獲取流動中的流場數據,提出描述傳感器數據有效性、差異性和冗余性的指標,通過貝葉斯估計、神經網絡等方法求解傳感器的最優分布,得到更為可靠的結果[54-58](見圖6[56],圖中序號1~20 為傳感器最優位置順序)。但是總體而言,對于這一類問題的探究,目前大多只停留在工程優化的層面,不同的問題有著不同的優化目標以及不同的側線分布特征,尚未有一個從真實魚類側線生物機理與進化角度出發,能夠真正解釋側線分布、指導傳感器陣列設計的結論。
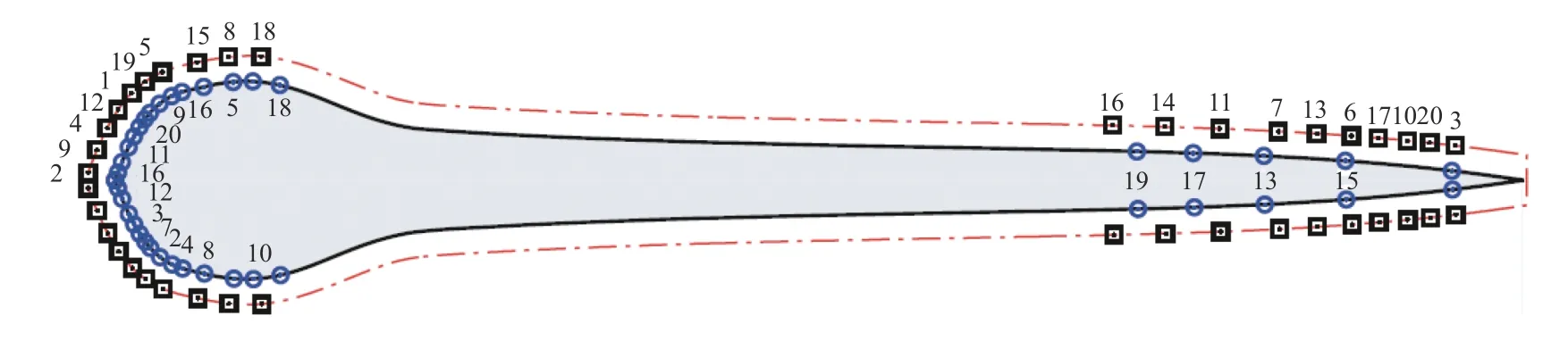
圖6 壓強傳感器與剪應力傳感器分布優化結果Fig.6 Optimization results for the distribution of pressure sensors and shear stress sensors
3 基于人工側線系統的水流檢測研究
自然界中的水流十分復雜,并且上文提到現有的水下探測方法具有一定的局限性,隨著各種人工側線傳感器的出現,由這些傳感器組成的人工側線系統逐漸被用于感知流體環境信息。目前這類研究主要集中在以下幾個方面: 流場分類、流速與流向檢測、渦街檢測和振蕩源檢測等。部分人工側線系統及其載體如圖7所示。
1) 在流場分類方面,Salum?e 等[59]使用1 條安裝有5 個壓強傳感器(S1~S5)的機器魚(見圖7(a))開展流動分類實驗,發現在不同的流動環境下(例如均勻流動和周期性湍流),壓強傳感器數據呈現不同的特征,這一點能夠幫助機器魚識別所處的流場環境;此后又通過增加傳感器的數目(ps0~ps10)提升了人工側線系統的性能(圖7(b)分別為軸線AA'上的主視圖與俯視圖),新的人工側線系統能夠幫助機器魚基于壓強波動分布區分層流與湍流[60]。除了對于壓強數據的基本分析外,學習方法也能夠幫助人工側線系統識別流場環境。Liu 等[61]使用由23 個壓強傳感器組成人工側線系統(見圖7(c)),基于可視化的壓差矩陣與一個4 層卷積神經網絡完成了流場分類任務。
2) 水流最重要的參數為流速與流向,對這2個參數的準確估計是精準、穩定控制機器魚運動的基礎。Salum?e 等[59]基于伯努利方程,擬合出機器魚(見圖7(a))兩側的平均壓強與水流速度的關系,同時基于機器魚受到水流沖擊的一側壓強更大,提出根據機器魚兩側壓強差識別流向的方法。此外,核嶺回歸以及神經網絡等學習方法也被用來分析人工側線數據與水流流速、流向的關系[62-65]。
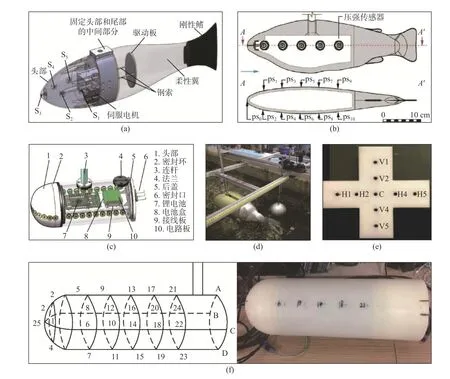
圖7 多種人工側線系統及載體Fig.7 Several artificial lateral line systems and the carriers
3) 渦街在自然界中十分常見,例如水流流經巖石障礙物產生的尾流、魚類擺尾產生的尾跡等。對渦街特征的估計能夠幫助機器魚識別上游物體的尺寸、位置以及周圍魚類的相關信息,這對機器魚在自然水流環境下的感知與運動具有重要意義[66]。Yang 等[47]首先使用人工側線系統分析圓柱體產生的Kármán 渦街的空間速度分布。Ren等[67]從理論角度研究了真魚如何利用側線感知渦街,基于勢流理論,建立了魚體附近壓強場分布與渦街尺寸、傳播速度和方向等參數的聯系[41,59,68]。此外,渦街頻率、強度和距離等參數也被證明能夠通過人工側線數據來估計[69]。在此基礎上,Free等[70-71]通過經驗觀測確定了游經渦街的最優路徑,采用閉環控制策略,實現了機器魚在渦街中的導航與巡游。
4) 振蕩源也是一種模擬魚類尾跡的方法。利用人工側線系統獲取的速度與壓強信息,估計振蕩源的位置與運動方向,對于進一步實現水下機器魚的最優軌跡控制與跟蹤游動有著重要意義。基于勢流理論,Yen 等[72]將機器魚的尾鰭視為振蕩源(見圖7(d)),建立了流場變化的數學模型,描述了尾鰭擺動參數與人工側線壓強變化的關系,設計了讓機器魚根據人工側線信息調整擺動幅度、頻率和偏航角的跟蹤控制方法。除了流體力學理論模型外,研究者們還使用CFD 仿真和真實實驗的方式,基于其他人工側線模型(圖7(e)和(f))獲取相關數據,圖7(e)中字母所示為傳感器位置。使用最小二乘法、波束成形算法以及神經網絡等方法,較好地估計了振蕩源的參數[3,44,51,73-88],實現了對振蕩源運動軌跡的追蹤[89-90]。
4 基于人工側線系統的仿生機器魚感知與控制研究
水流檢測主要基于靜態的機器魚模型或者靜態的人工側線陣列,而對于自由運動的機器魚而言,使用運動的側線感知非定常流動時,難度將大大增加。然而,Chambers 等[91]的研究表明,運動狀態下的人工側線感知性能優于靜態側線,這也與自然界中魚類的感知方式一致。因此,搭載有人工側線的、運動的機器魚能夠提供更有價值的實驗數據,可以嘗試利用這些信息,讓機器魚實現類似于真實魚類的感知功能與自主決策行為。由于完全自由游動情形較為復雜,研究者們通常首先探究具有一定運動約束的側線感知問題。目前,相關領域已有較多的研究成果,例如運動模式識別、運動參數(速度、攻角等)估計與控制、障礙物識別與避障、鄰近機器魚的感知、定位以及能量節省等。這也是筆者團隊的主攻方向。部分仿生機器魚與人工側線系統如圖8所示。
在運動模式識別方面,Liu 等[92]發現機器魚以不同的模態(直游、轉彎、上升和下潛等)運動時,壓強數據呈現出不同的特征。他們從9 個壓強傳感器數據中提取特征點,基于減法聚類算法識別出機器魚的運動模態。該方法有助于從側線數據中快速獲得機器魚的運動狀態,有利于后續迅速、高效施加控制決策。
在運動參數估計以及機器魚控制方面,Kruusmaa 等[93]基于壓強傳感器(見圖7(a))測得的數據給出速度估算公式,并且提出一種線性控制律來調節機器魚尾鰭擺動頻率,從而保持位置的穩定。此外,還基于魚頭兩側的壓差估計魚頭與水流的夾角,并且設計控制方法讓機器魚根據壓差數據調整游動參數,最終實現了機器魚在穩態水流以及障礙物后方的位置估計以及位置穩定[94]。美國馬里蘭大學研究團隊[95-97]設計了一種類似于Joukowski 翼型的柔性機器魚(見圖8(a),圖中物理量詳見文獻[95]),并在體表安裝分布式壓強傳感器,同時基于貝葉斯濾波器提出一種檢測流速和攻角的方法,實現了對機器魚游速的反饋控制。此外,相關研究表明,基于神經網絡等訓練方法,壓傳數據還能夠反映機器魚的俯仰角、擾動力和擾動力矩等參數,有助于提升對機器魚的運動控制精度[98-100]。
避障功能也是機器魚水下游動過程中必須具備的功能之一,這一方面也有著許多研究成果。Martiny 等[101]使用一款裝配有4 個熱線式人工側線傳感器的自主水下航行器(見圖8(b)),基于測得的航行器周圍的流速信息,通過理論分析與實驗方法估計出了障礙物與航行器的距離。DeVries等[96]對上游有障礙物時機器魚(見圖8(c))周圍的流場進行分析,從理論的角度得到了估計障礙物相對位置的非線性模型,并且使用遞歸貝葉斯濾波實現了機器魚在障礙物后方的位置穩定。Yen等[102]將機器魚(見圖8(d),圖中A,B,C 分別為傳感器位置)的尾鰭等效為一個振蕩偶極子源,基于3 個壓強傳感器測得的數據提出了一種控制機器魚沿著直線壁面游動并且保持一定距離的方法。此外,Yang 等[103]使用壓差傳感器與流速傳感器融合感知,使得機器魚(見圖8(e),圖中P1~P3為壓強傳感器,V4~V6為速度傳感器)在不同的攻角下都能夠估計出與壁面的距離。現有的避障研究都基于最簡單的情形,目前尚未有能夠控制機器魚在復雜障礙物群之間自由游動的研究結果,距離真正的避障需求差距較大。
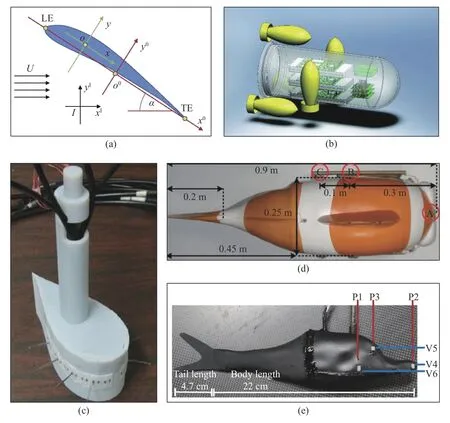
圖8 多種仿生機器魚及人工側線系統Fig.8 Several bio-inspired robotic fish and artificial lateral line systems
實際應用中,希望能夠控制機器魚群完成單條機器魚無法完成的復雜任務。因此,除了對于單魚的感知、控制研究外,多個機器魚相互間的感知與編隊控制也是一個熱點問題。Li 等[104]基于仿真數據訓練了人工側線壓強數據與雙魚距離的關系。Yen 等[105]用一個振蕩源模型模擬前魚的魚尾,基于壓傳數據估計出前魚的位置,并且設計了反饋跟蹤策略。Li 等[106]基于CFD 仿真與快速傅里葉變換(fast Fourier transform,FFT)方法,分析了雙魚前后距離、左右距離以及相位差等參數對于壓強信號的影響。筆者團隊[107-110]在這一方面也開展了大量研究,發現基于人工側線測得的壓強信息,后方的機器魚能夠感知到前魚的尾鰭擺動信息(例如頻率、幅度和偏航角)以及兩魚的相對位姿信息(例如相對垂直距離、相對偏航角、相對俯仰角和相對側傾角等)。為了更好地進行感知,基于伯努利原理提出了雙魚游動時體表動壓變化的理論模型,并且采用可視化實驗和CFD 仿真對集群游動現象進行了一定的分析。目前基于側線的集群游動研究只局限于數目較少的群體間的感知,尚未有基于側線數據的集群編隊控制方面的研究以及大規模群體的研究。
除了上述研究主題外,人工側線也有助于實現機器魚的定位。Muhammad 等[111]提出了一種水下地理感知技術,使得機器魚能夠根據側線數據在半自然或自然環境中識別出曾經到達過的位置。Francisco 等[112]提出一種基于地圖的定位技術,使用CFD 方法計算環境的流場速度分布圖,再根據人工側線系統獲取的信息估計所處的位置。此外,對于魚類、機器魚的研究還有推進、節能等主題[59],由于上述研究中并不涉及人工側線感知,所以不再贅述。但是在未來,也可以從側線感知的角度探討這些問題。
5 基于仿箱鲀機器魚的仿生側線感知研究進展
筆者團隊以自然界中的箱鲀(見圖9)為仿生對象,設計了2 款機器魚(見圖10)。箱鲀外形獨特,像一個盒子,盒子邊緣有獨特的脊骨結構,且皮膚表面呈現凹凸的特征。在游動時,這種結構能幫助箱鲀產生有利于姿態穩定的渦[113-115]。此外,盒子狀的機器魚能夠在體內搭載更多用于感知、控制的硬件設備,有利于研究的開展。

圖9 真實的箱鲀魚Fig.9 Real boxfish
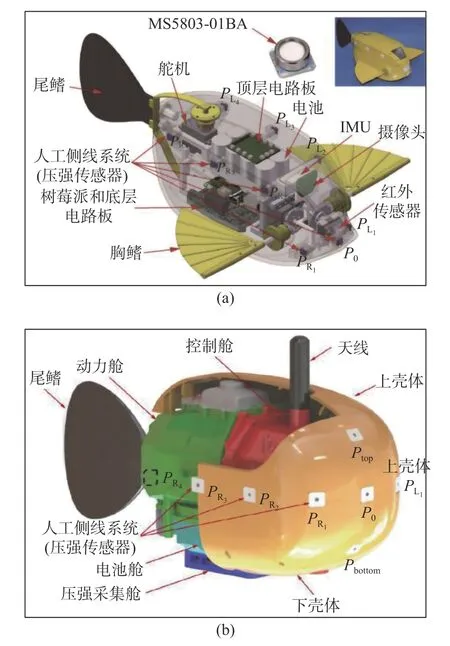
圖10 2款仿箱鲀機器魚Fig.10 Two box-fish-inspired robots
5.1 2 款仿生機器魚及其動力學建模
對于2 款仿生機器魚,其中一款外形接近箱鲀的特征,由多鰭肢驅動(尾鰭、胸鰭等)(見圖10(a))。在另一款仿生機器魚的設計過程中,考慮到上述提及的箱鲀游動時產生的渦結構以及胸鰭的擺動會影響體側側線的感知效果,將機器魚殼體簡化為規則盒狀,并且去除了其他鰭肢,采用單尾鰭驅動(見圖10(b))。2 款機器魚分別搭載有9 個和11 個壓強傳感器作為人工側線系統,以及慣性導航模塊(inertial measurement unit,IMU)測量三維空間內的加速度與姿態角信息。2 款機器魚都基于中樞模式發生器(central pattern generator,CPG)來控制鰭肢的擺動,可以調整鰭肢的擺動頻率、幅度和偏置,實現直游、轉彎、上升、下降和橫滾等運動。
在開展感知與控制研究之前,首先需要對于機器魚在水下的運動特性進行分析。針對2 款機器魚建立了自由游動的三維動力學模型,該模型能夠在不同的運動方式及大范圍的運動參數下有效估計機器魚在水下的速度、姿態和軌跡等信息(見圖11[116-117])。
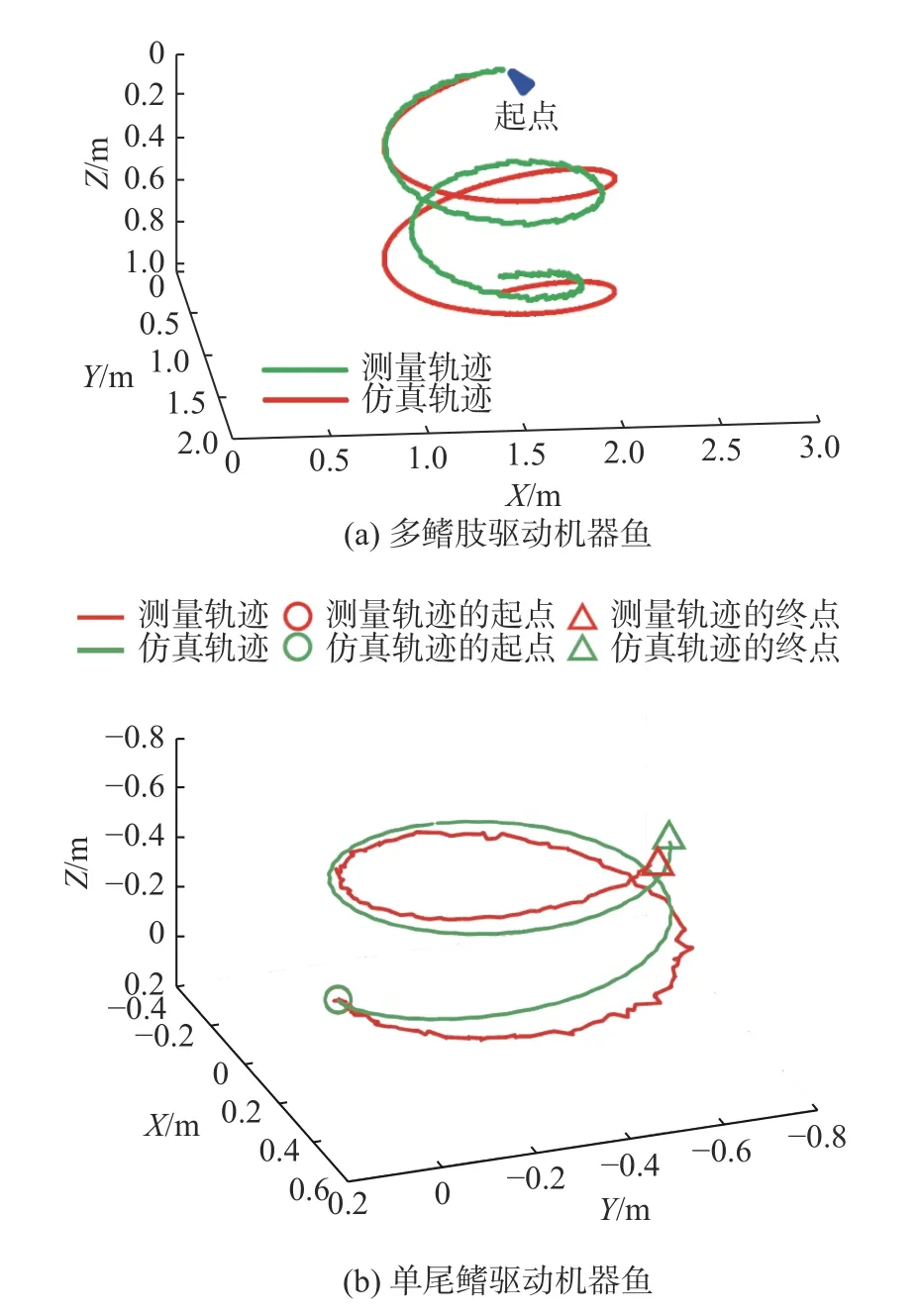
圖11 盤旋運動下基于動力學模型的軌跡估計結果Fig.11 Trajectory estimation results based on dynamic model under spiral motion
5.2 基于人工側線系統的運動狀態估計
運動狀態估計是仿生機器魚研究中的基本問題之一,只有實現了準確的運動速度、軌跡估計,才能更好地對仿生機器魚進行控制,開展下一步研究。筆者團隊基于2 款仿生機器魚,在運動參數估計方法上取得了一定的進展。
機器魚的游動速度是最重要的運動參數之一,現有的速度估計方法大多基于伯努利方程,機器魚頭部的靜態壓強、動態壓強以及游動速度有如下關系
式中:pt為運動時頭部的駐點壓強;ps為靜止時的壓強;v為運動速度;ρ為水流密度。在此基礎上,發現機器魚游動時身體會進行節律性擺動導致駐點位置的偏移,因此在速度估計模型中引入了角速度ω,有
式中:p為魚頭處3 個壓強傳感器減去靜水壓強后的均值;a,b,c,d為待定系數。根據回歸結果能夠基于壓傳數據與角速度反解游動速度,準確、實時地估計機器魚的游動速度[118](見圖12(a)[119])。
此外,除了游動速度,還需要考慮機器魚的轉彎角速度、上升/下降速度,才能實現對機器魚軌跡的準確估計。基于Lighthill 的理論分析結果與非定常伯努利方程,首次推導出機器魚體表動態壓強變化量?pdynamic(絕對壓強減去靜水壓強)與主要運動參數的關系模型
式中:U表示游動速度;ω表示偏航角速度;θ表示俯仰角速度;每一項前的系數都是只依賴于機器魚幾何外形的參數。基于實驗測得的數據,采用最小二乘法標定出適用于不同運動狀態(直線、轉彎、上升和盤旋)下的模型參數。標定完成后,在后續的實驗中,基于側線壓傳測得的壓強數據,反解出機器魚的運動參數,最終實現對軌跡的準確估計(見圖12(b)[120])。
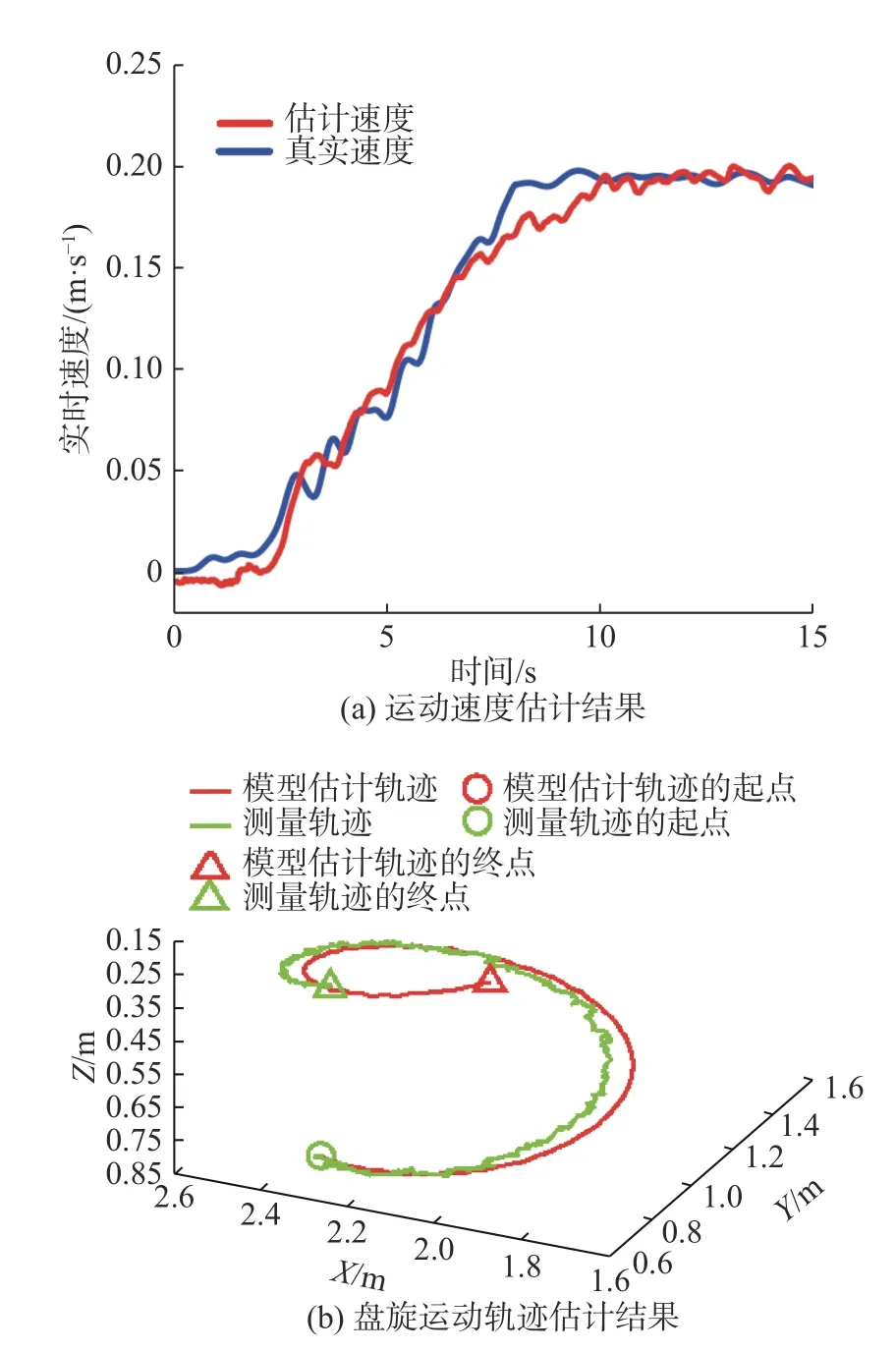
圖12 運動狀態估計結果Fig.12 Estimation results of the motion states
該工作首次實現了對于自由游動機器魚的軌跡估計,且方法能夠推廣至所有擁有剛性殼體的機器魚,也證明了人工側線系統在運動參數、軌跡估計方面的有效性,并具備成為水下機器人通用傳感系統基本元件的潛力。在未來,會關注壓強傳感器在野外環境中的標定,并且嘗試將人工側線系統應用于自然環境中的軌跡估計研究。此外,還會將人工側線系統得到的軌跡信息作為閉環控制回路中的反饋信息,實現對水下機器魚的軌跡跟蹤控制。
5.3 基于人工側線系統的姿態保持控制
攻角即機器魚朝向與來流的夾角。為了能夠控制機器魚像真實魚類一樣在水下自由游動,除了需要控制機器魚的游動速度外,還需要控制機器魚在來流中的攻角,實現姿態的穩定。在此基礎上,從傳感器融合感知的角度進一步研究這一問題。對比基于3 種反饋信息(人工側線與神經網路估計的攻角數據、IMU 測得的偏航角數據以及二者融合數據)下攻角控制策略的效果,可以發現,雙傳感器融合信息方法優于單傳感器方法(見圖13[121])。
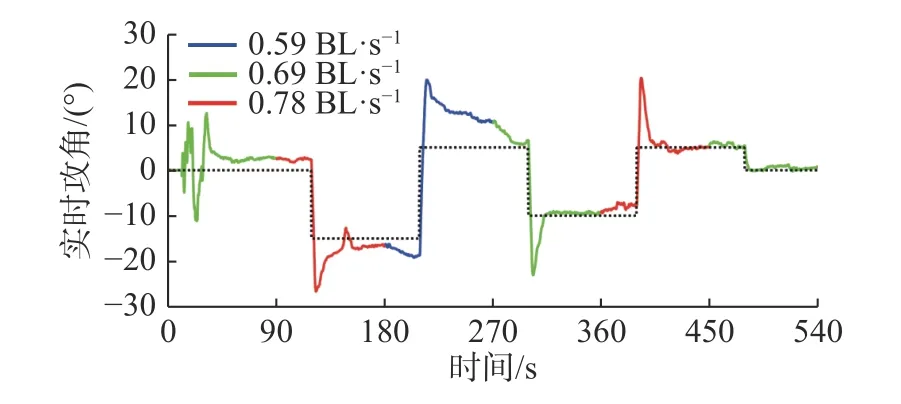
圖13 單尾鰭驅動機器魚基于雙傳感器融合方法的攻角控制結果Fig.13 Control results of angle of attack of single-tail driven robotic fish based on dual-sensor fusion method
為了更好地解決這一問題,首次引入強化學習框架。由于流體的強非線性,機器魚在游動時周圍的流場變化無法用簡單的理論模型表達。為此,采用深度神經網絡模擬機器魚游動時的流固耦合環境。基于這一虛擬仿真環境不斷生成數據,使用確定性策略梯度(deep deterministic policy gradient,DDPG)算法訓練機器魚利用壓強傳感器數據與IMU 數據實現姿態穩定的控制策略。最終,強化學習框架能夠直接將人工側線系統測得的傳感器原始數據以端到端的方式直接映射到連續控制信號,實現對攻角的控制(見圖14[122])。由于虛擬環境的引入,避免了大量獲取實驗數據的過程。相比于傳統的模型預測控制(model predictive control,MPC)方法而言,該方法能夠與MPC 方法相媲美甚至效果更好。此外,MPC 方法依賴大量的計算資源,需要在電腦上運行部署,而基于學習的方法能夠直接在機器魚搭載的樹莓派上運行,這對于自主式機器魚的感知與控制有著重要意義[122]。
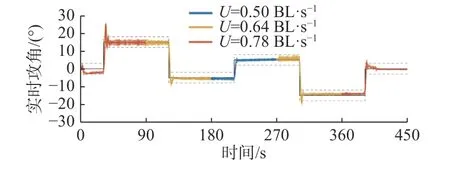
圖14 單尾鰭驅動機器魚基于深度強化學習框架的攻角控制結果Fig.14 Control results of angle of attack of single-tail driven robotic fish based on deep reinforcement learning framework
這個方法能夠很好地用于實驗室環境下的姿態保持控制,但是自然環境下的實驗具有更多的不確定性。當機器魚能夠自由游動時,控制其相對于水流的攻角也會更加復雜。未來,將嘗試結合速度、攻角的估計與控制研究,在自然環境中讓機器魚像真實魚類那樣游動。
5.4 基于人工側線系統的機器魚鄰近感知
目前關于仿生機器魚群的感知與控制研究較少,筆者團隊較早地基于人工側線系統開展了對于多魚鄰近感知的探究分析。一方面,通過可視化與CFD 仿真技術分析了機器魚擺尾產生的渦街特性(見圖15[107])。另一方面,通過采集尾鰭擺動引起的流場壓強變化數據,發現人工側線壓強傳感器能夠檢測到前方尾鰭的擺動幅度、頻率、偏置角以及相對垂直高度、相對偏航角、相對俯仰角以及相對橫滾角等相對位姿信息[107]。在此基礎上,基于線性回歸、隨機森林和神經網絡等方法通過壓強傳感器數據對上述信息進行估計,得到了較好的估計效果(見圖16[108])。
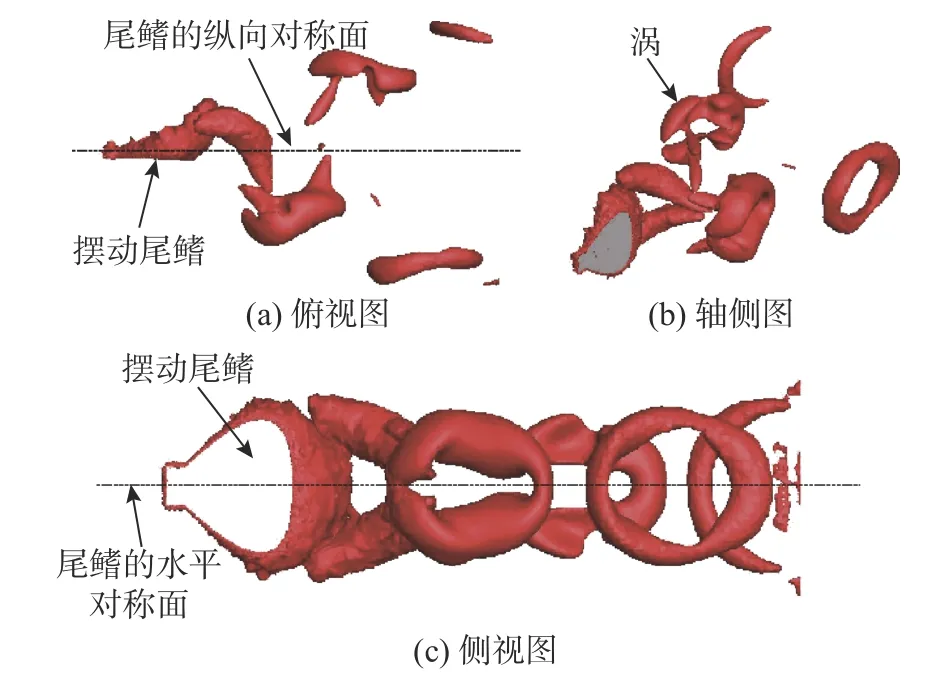
圖15 尾鰭后方瞬時渦環圖Fig.15 Instantaneous vortex core region behind an individual oscillating caudal fin
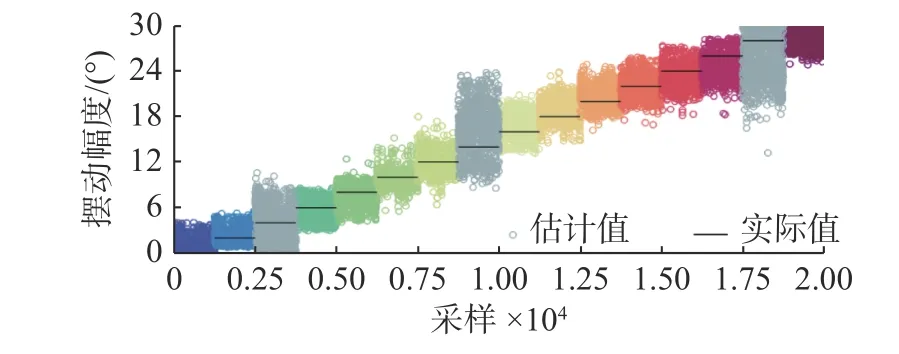
圖16 基于隨機森林方法的前方尾鰭擺動幅度估計結果Fig.16 Estimation results of oscillating amplitude of the front caudal fin based on random forest method
此外,還分析了領航者-跟隨者的雙魚隊形下,人工側線壓強數據與前后距離的關系[109],如圖17[110]所示。圖中: Δd1和Δd2為器件尺寸;Slogitudinal和Slateral為機器魚前后、左右距離;Vu和Vd為兩魚速度;ωu和ωd為兩魚角速度。進一步地,基于勢流理論與數據驅動方法,提出了雙魚隊形下的壓強理論模型,發現運動兩魚相對一側的傳感器會受到兩魚運動的影響,而兩魚相背一側的傳感器只會受到自身運動的影響。實驗結果也驗證了這一模型的準確性[110]。
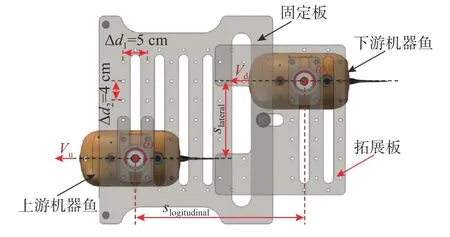
圖17 雙魚領航者-跟隨者隊形示意圖Fig.17 Leader-follower formation diagram of two robotic fishes
以上進行的機器魚鄰近感知研究大部分都是簡化的問題,機器魚的部分自由度被約束。目前尚未有關于完全自由的集群游動時機器魚對周圍個體的感知研究。進行此項研究的基礎是首先需要基于一些方法讓機器魚以特定的隊形穩定地進行游動,目前尚未有基于側線反饋信息實現隊形控制的研究,而能夠實現隊形保持的機器魚模型也并未搭載人工側線。未來可以將這兩方面研究相結合,將集群控制與鄰近感知研究拓展到完全自由的情形,讓機器魚群能夠像魚群一樣進行游動與感知。
6 總結與展望
由于水下探測的需要以及現有水下探測方法的局限性,研究人員以魚類的側線感官為靈感,開發了由一系列傳感器組成的人工側線系統,并與水下機器人技術相結合,實現了多項感知以及控制任務。人工側線系統在水下探測領域展現出巨大的潛力。
文中概述了基于不同原理的人工側線傳感器及其用于水流檢測、機器魚感知與控制的各項研究。關于人工側線系統的研究已經有了許多成果,但是現有的人工側線系統性能仍然與真實的魚類側線相去甚遠。
從傳感器性能的角度分析,目前用于人工側線系統的傳感器陣列從靈敏度、穩定性、協調性和信息處理能力等許多方面來看,都無法與真實魚類的側線相比。為了提升單個傳感器的靈敏度與穩定性,可以從大量新型材料中選取具有傳感能力、力學性能優良、化學性質穩定的材料(例如石墨烯等)作為基礎,設計相應的敏感元件、轉換元件與處理電路,并作防水處理,使得傳感器能夠在惡劣的溫度和壓力條件下保持足夠的精準度。除了提升單個傳感器的性能外,傳感器陣列的協調作用也十分重要。現有的人工側線系統一般只由一種傳感器(壓強傳感器或流速傳感器)組成,并且呈直線或方形排列。相比之下,真實的側線由表面神經丘和管道神經丘組成,并且具有復雜的分布方式。在后續的研究中,可以在機器魚表面同時安裝壓強傳感器和流速傳感器,進行流場感知與機器魚控制實驗,與現有的傳感器陣列性能進行對比分析。目前用來優化人工側線分布的指標大多只能針對某一特定的目標問題,具有一定的局限性,并不能解釋魚類側線的分布規律,也無法推廣到所有的感知任務中。因此,需要研究魚類側線分布的生物學原理,提出具有普適意義的傳感器性能指標,從而為不同任務場景下人工側線系統的分布設計提供理論指導。在對側線信息的處理方面,魚類能夠迅速對感受到的信號做出反應。隨著側線硬件的進步,也需要開發更高效的濾波、感知以及行為決策方法,從算法的角度提升人工側線的性能。除了傳統的算法外,機器學習方法與人工智能的發展為這一問題提供了新的方向。
在水流檢測方面,研究者們針對不同的問題提出了多種感知方法。但是,目前的研究大多在實驗室環境下進行,人工側線載體運動簡單(例如靜止或直線運動),水環境穩定。而在自然環境中,真實的水流與魚類的游動都要復雜的多,這將大大增加感知實驗的難度。隨著人工側線性能的提升,未來需要更多地開展自然環境中的實驗,例如使用人工側線系統在真實的河流中實時估計水流速度、河流中的障礙物位置以及真魚的位置與擺動狀態等,進一步挖掘人工側線的感知潛力,使其越來越貼近真實的魚類側線功能。
水下機器魚的流場輔助控制是一個前景十分可觀的研究方向,未來在海洋勘探中可以得到廣泛的應用。作為一切控制任務與感知任務的前提,機器魚首先需要能夠準確估計自身的速度、位置和姿態等信息。因此,需要基于流體力學理論或數據驅動方法建立水下機器魚的運動學與動力學模型,幫助機器魚在無法使用視覺的情況下完成運動模式的自我識別與軌跡估計。在此基礎上,才能夠設計感知與控制方法,豐富機器魚在水下的功能。避障行為是實現機器魚自主運動必須要解決的難題之一。機器魚需要根據人工側線獲取的流場信息,識別障礙物的大小和位置,重新構建出周圍的地圖環境并且規劃最佳導航路徑。在實驗室環境中,可以探究機器魚對于簡單障礙物單元(例如墻壁、圓形障礙和三角障礙)以及障礙物群的感知,設計相應的避障控制策略。在具備一定的感知能力后,在自然河流實驗環境中進一步實現機器魚的避障游動行為。除了對于單條機器魚的控制研究外,基于人工側線系統,還可以研究機器魚群的相互感知與集群控制,例如在三角隊形或方形隊形下,探究機器魚利用人工側線感知周圍個體的位置信息,并且基于相對位置信息設計反饋控制策略,實現隊形的穩定。在未來的水下任務中,相比于單魚而言,使用魚群能夠極大地提高水下探索的效率與水下任務的成功率。
7 結束語
水下仿生側線感知技術涉及生物學、機器人學、流體力學以及智能科學等多個學科與領域,雖然研究難度較大,但具有較高的研究價值與廣闊的應用前景。人工側線系統的發展為海洋勘探與開發提供了強大的工具,尤其是在惡劣環境下聲吶、紅外等傳感方式失效時。文中主要介紹了水下仿生側線感知的研究現狀以及筆者團隊的有關工作。目前現有的研究主要集中于人工側線傳感器的研發、基于人工側線系統的水流檢測、基于人工側線系統的仿生機器魚感知與控制等方面。但是目前的大部分研究對問題作了簡化,與真實魚類在水中的游動以及感知還有一定差距,要實現與真實魚類相媲美的感知能力與自主控制決策能力,還有很長的路要走。在未來,隨著硬件與感知決策算法的進一步發展,人工側線系統有望進一步提升水下機器魚的感知能力以及其他綜合能力,幫助更好地探索海洋、保護海洋,建設海洋強國。
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
遼金歷史與考古(2019年0期)2020-01-06 07:45:20
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
電子制作(2018年11期)2018-08-04 03:26:04
汽車工程學報(2017年2期)2017-07-05 08:13:02
國際商務財會(2017年8期)2017-06-21 06:14:14
電子制作(2017年23期)2017-02-02 07:17:19