綜采工作面三機數字孿生及協同建模方法
2023-03-18 09:24:00劉清張龍李天越杜鵬飛
工礦自動化 2023年2期
劉清, 張龍, 李天越, 杜鵬飛
(1. 北京天瑪智控科技股份有限公司,北京 101399;2. 兗礦能源集團股份有限公司,山東 鄒城 273500;3. 中國礦業大學 安全工程學院,江蘇 徐州 221116)
0 引言
2020 年3 月,由國家發展改革委、國家能源局等八部委聯合發布的《關于加快煤礦智能化發展的指導意見》,樹立了煤礦智能化發展階段性目標,加快了煤礦智能化體系建設[1]。基于數字化礦山基礎,應用新一代信息技術、智能制造技術、人工智能技術和數字孿生技術建設智能化礦山,實現煤炭安全、智能、高效、綠色開采和清潔利用,成為現代煤礦發展的必由之路[2-4]。
數字孿生技術是以數字化方法創建物理實體的虛擬模型,并實現物理世界及數字世界之間雙向映射、動態交互、實時連接的關鍵技術,可將物理實體的屬性、結構、狀態、性能、功能和行為映射到數字世界[5],形成高保真的動態多維、多尺度、多物理量模型[6],從而為物理實體提供更加實時、高效、智能的運行或操作服務。
數字孿生技術在煤炭行業已有相關研究。葛世榮等[7]采用基于仿真的數字孿生建模方法提出了綜采工作面數字孿生系統架構,系統虛擬實體包括機理模型和行為模型,機理模型、行為模型與其控制系統組合的離線運行模式形成綜采工作面計算實驗系統,為綜采工作面智能控制系統真正的自主決策復雜算法開發提供了測試平臺。王宏偉等[8]提出了一種液壓支架數字孿生體聯合建模方法,利用SolidWorks 軟件建立液壓支架機械系統和液壓系統的三維實體模型,將三維實體模型生成.sldasm 格式文件導入MapleSim 軟件中,使用運動副連接機械部分,液壓元件連接液壓部分,建立液壓支架機械系統孿生模型和液壓系統孿生模型,二者聯合,與物理體通過數據庫進行數據交互及模型優化,并進行了虛實一致性實驗。孫繼平[9]、謝嘉成[10]通過構建數字孿生模型對綜采工作面環境和三機狀態進行實時監測。葛世榮等[11]、洪飛[12]使用 Unity 3D 等軟件建立了智采工作面模型,完成了在虛擬環境下綜采工作面的支護監測與動態規劃。以上研究方法雖然利用數字孿生技術將物理對象進行了數字化表達,但側重對單一設備進行建模,缺少三機耦合協同關系分析。
針對上述問題,本文基于數字孿生技術,提出了綜采工作面三機數字孿生及協同建模方法。對采煤機、液壓支架和刮板輸送機進行數字孿生建模,對三機協同工藝進行離散事件建模。通過采煤機搖臂升降仿真、液壓支架升柱仿真及基于生產日志的三機協同工藝虛實對比仿真驗證了模型與真實設備映射的一致性。綜采工作面三機數字孿生及協同建模方法為綜采設備及其協同關系的數字孿生建模提供了新思路。
1 綜采三機數字孿生建模
綜采三機的數字孿生模型包含智能體模型和三維模型,三者關系如圖1 所示。采用智能體建模方法[13]構建包含感知單元、控制單元和執行單元的采煤機、液壓支架、刮板輸送機智能體模型,依據三維建模流程構建對應的可視化模型,以智能體驅動三維模型,二者結合構成三機數字孿生模型。采用離散事件建模方法構建三機協同工藝模型,按照時序梳理三機開采工藝,形成三機協同工藝時序表。數字孿生模型用于描述三機的狀態與行為,進行個體層面的仿真計算;三機協同工藝模型用于表征數字孿生模型之間的時序動作轉換,實現對三機協同過程整體層面的建模及推演。這種混合建模方法在一定程度上體現了分層設計的思想,各個子模型保持自身獨立性,同時整體具有集中協同的特點。
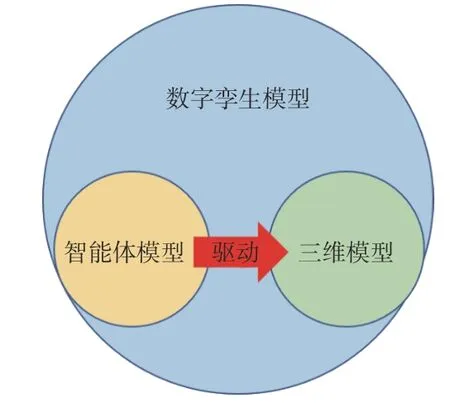
圖1 數字孿生模型、智能體模型與三維模型的關系Fig. 1 Relation among digital twin model,agent model and 3D model
智能體具有自主性、交互性、反應性和主動性,能根據其內部狀態與主動感知的環境信息決定和控制自身行為。智能體模型由感知單元、控制單元和執行單元[14]組成,如圖2 所示。
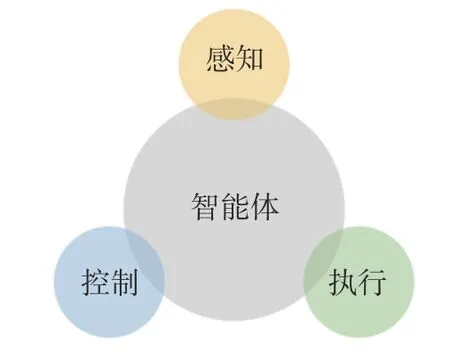
圖2 智能體模型組成Fig. 2 The agent model components
三維模型是物體的多邊形數字可視化表示,通常用計算機或其他視頻設備進行顯示。工業領域常使用C4D、3D Max、Auto CAD 等軟件進行建模[15]。本文按照常規三維建模流程構建綜采工作面三機三維可視化模型,建模流程如圖3 所示,具體步驟包括模型CAD 圖紙預處理、多邊形建模、貼圖制作、基礎數據處理、過程檢查、多層場景合并、模型優化、成品檢查。
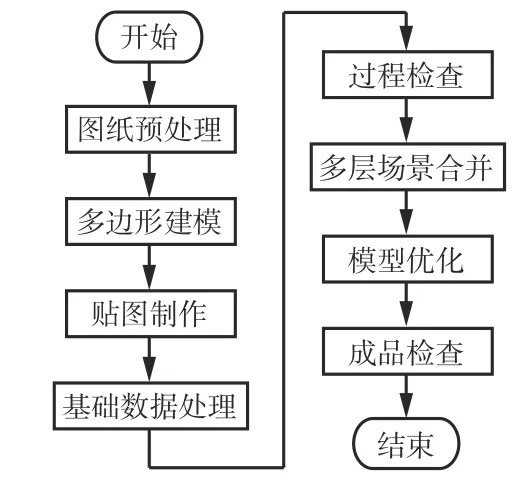
圖3 三維模型建模流程Fig. 3 3D model modeling flow
離散事件建模是將一系列能夠改變模型狀態的動作抽象為事件,為每個事件都分配時間戳來表示事件發生的仿真時間點[16]。由于開采過程中各設備的協同動作過程符合離散事件的特點,故將三機協同過程按照離散事件方法進行建模。
1.1 采煤機數字孿生建模
1.1.1 采煤機建模
采煤機是煤礦開采的核心裝備,分別構建其智能體模型和三維模型。采煤機的智能體作為獨立的活動個體,包括感知單元、控制單元和執行單元。
1) 采煤機感知單元建模:以采煤機CAD 圖紙確定結構尺寸參數,結合傳感器實時采集數據,實現對采煤機運行狀況的感知與周圍環境的探測[17]。采煤機關鍵感知數據項見表1。
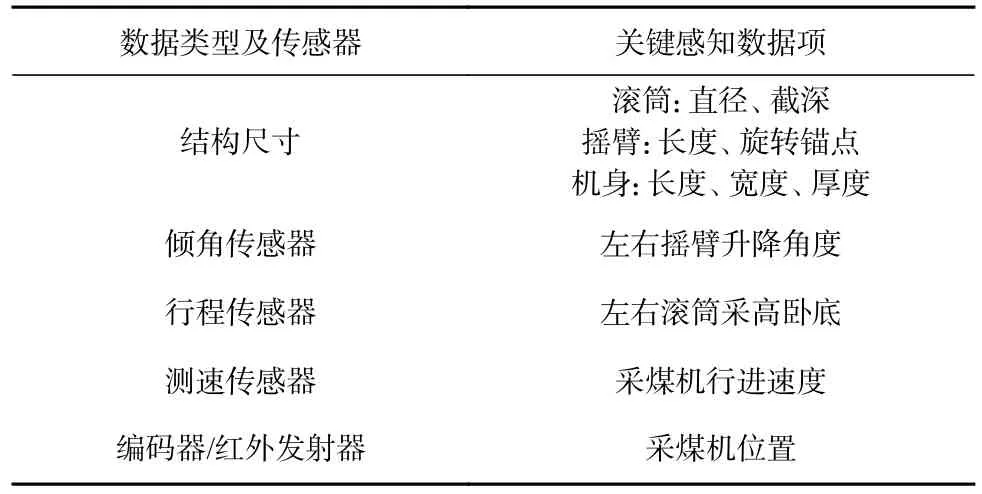
表1 采煤機關鍵感知數據項Table 1 Key perception data items of shearer
2) 采煤機控制單元建模:對采煤機結構約束條件和采煤機與液壓支架干涉約束條件進行建模,約束包括:① 采煤機搖臂升降角度約束,受限于調高油缸伸縮范圍而產生的滾筒最高與最低的范圍。② 采煤機速度約束,受限于工作面供液能力及液壓支架支護速度。③ 采煤機滾筒與液壓支架頂梁、護幫之間的干涉約束,通過設置安全距離實時檢測它們之間的距離,若小于安全距離時,下發減速或停機指令,避免設備之間發生碰撞事故。
3) 采煤機執行單元建模:采煤機動作模型包括左右滾筒升降、牽引啟動、牽引停機、加速與減速等,上述動作除了滾筒的升降,其余均涉及采煤機的位置、速度變化,需要采煤機騎架在刮板輸送機上協同仿真,所構建的采煤機數字孿生模型與真實物理裝備的一致性實驗將圍繞采煤機滾筒的升降動作展開。
按照圖3 流程建立了采煤機三維可視化模型,其與真實采煤機的對比如圖4 所示。在建模軟件3D Max 中測量得到的各個零部件尺寸數據與真實采煤機CAD 圖紙數據一致,說明所建立模型的正確性。
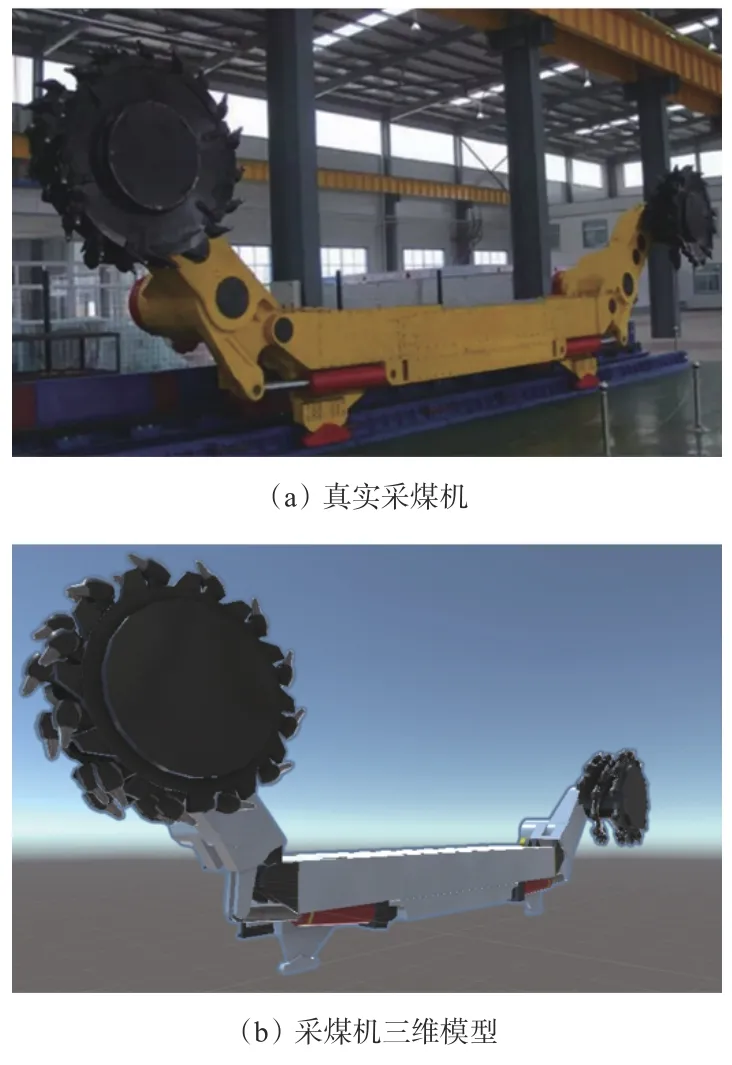
圖4 真實采煤機與三維模型對比Fig. 4 Comparison of real shearer and 3D model
1.1.2 實驗仿真
為了驗證所建立的采煤機模型的正確性進行了虛實一致性仿真實驗。采煤機通過控制調高液壓缸的伸縮動作,帶動搖臂旋轉,實現滾筒升降。受限于調高液壓缸伸縮范圍,搖臂旋轉的傾角取值為[?16.05°,40.92°],由于采煤機兩側搖臂對稱,本文以左側搖臂為例進行升降實驗。
采煤機數字孿生模型左側搖臂升降虛實一致性實驗結果如圖5 所示,初始時左側搖臂呈水平狀態,傾角為0,實驗時間為30 s。實驗開始時,持續輸入“左側滾筒上升”動作指令,15 s 后,采煤機數字孿生模型與真實采煤機左側搖臂傾角均達到上限,在0~5 s 內,采煤機調高油缸運動呈現滯后性,傾角上升幅度滯后于智能體傾角;在8~14 s,數字孿生模型仿真傾角變化呈線性關系,真實采煤機傾角變化類似拋物線。在“左側滾筒下降”動作仿真中,變化過程與上升過程類似。采煤機數字孿生模型在搖臂升降實驗過程中,其傾角變化過程與真實采煤機變化過程一致,平均誤差為2.3°,其動態特性滿足一致性實驗要求。
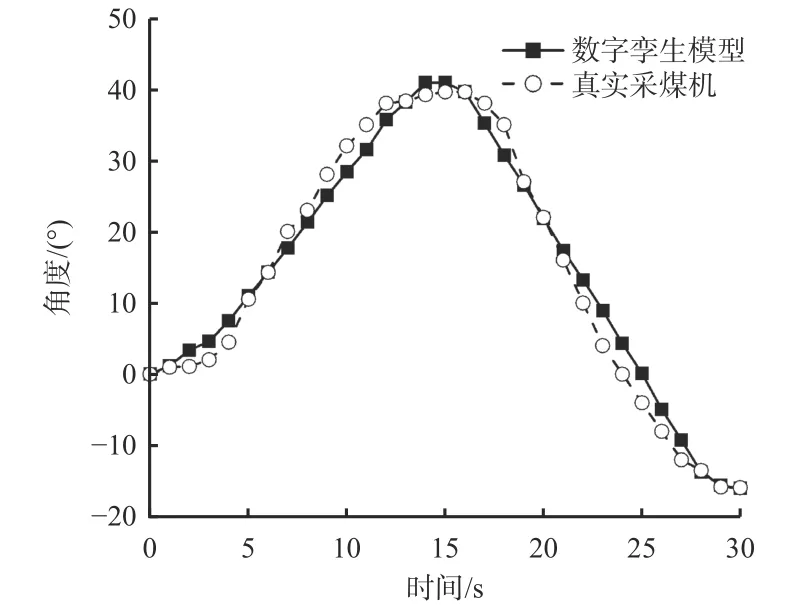
圖5 采煤機左側搖臂傾角數字孿生數據與真實數據對比曲線Fig. 5 Comparison curves between digital twin data and real data of dip angle of shearer left rocker arm
1.2 液壓支架數字孿生建模
1.2.1 液壓支架建模
液壓支架是煤礦生產的重要設備之一,其主要作用是在綜采工作面支護頂板,保護人員與設備的安全。選取兩柱掩護式支架作為研究對象,進行數字孿生建模。對智能體模型進行感知單元分析,關鍵傳感器包括底座、連桿、頂梁傾角傳感器,平衡桿、立柱油缸壓力傳感器及推移缸的位移傳感器[18]。
根據液壓支架CAD 圖紙將其簡化為圖6 所示的桿系結構,便于構建液壓支架運動約束控制模型。
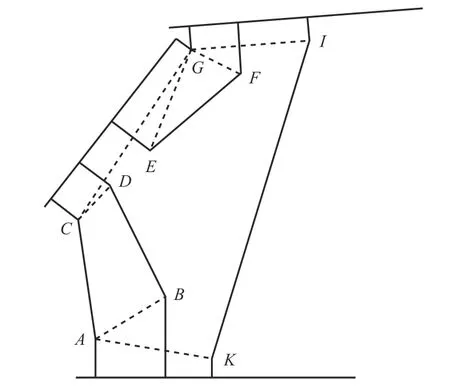
圖6 簡化的液壓支架桿系結構Fig. 6 Simplified structure of hydraulic support rod system
在該液壓支架桿系結構中,由平衡桿和立柱油缸的伸縮運動帶動液壓支架整體結構的變化。根據圖紙測量得到液壓支架各個尺寸數據,結合高度傳感器與傾角傳感數據,可求解液壓支架姿態、油缸推移量,并根據煤層數據可計算出液壓支架需調整的位置高度,進而迅速求解液壓缸所需的伸長量,從而對液壓支架姿態進行預測控制。根據圖6 的結構關系,可得到液壓支架環形向量方程:
式中:LAB為后連桿底部點A到前連桿底部點B的距離向量;LBD為前連桿底部點B到頂部點D的距離向量;LAC為后連桿底部點A到頂部點C的距離向量;LCD為后連桿頂部點C到前連桿頂部點D的距離向量;LEG為平衡桿底部點E到頂梁與掩護梁銜接點G的距離向量;LGF為頂梁與掩護梁銜接點G到平衡桿頂部點F的距離向量;LEF為平衡桿底部點E到頂部點F的距離向量;LKA為立柱油缸底部點K到后連桿底部點A的距離向量;LCG為后連桿頂部點C到頂梁與掩護梁銜接點G的距離向量;LGI為頂梁與掩護梁銜接點G到立柱油缸頂部點I的距離向量;LKI為立柱油缸底部點K到頂部點I的距離向量。
上述向量環方程組即為液壓支架約束控制模型的核心算法,對其進行求解后可得到液壓支架姿態的實時數字化表達。液壓支架執行單元包含液壓支架升降柱、推溜移架、平衡伸收動作,支撐液壓支架智能體模型動作交互。按照圖3 流程建立了液壓支架三維可視化模型,其與真實液壓支架的對比如圖7所示。可看出液壓支架三維模型滿足虛實一致性要求。
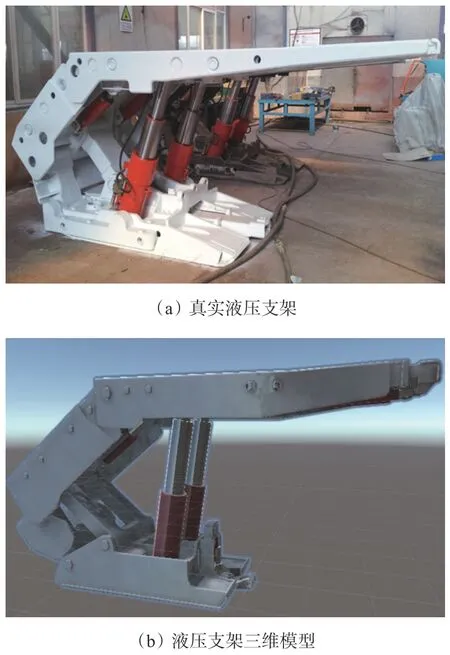
圖7 真實液壓支架與三維模型對比Fig. 7 Comparison of real equipment and 3D model of hydraulic support
1.2.2 實驗仿真
為了驗證所建立的液壓支架模型的正確性,進行了液壓支架升柱動作仿真實驗。對液壓支架模型進行迭代求解,設置初始頂梁角度為0,立柱長度取值為[2 000 mm, 4 000 mm],變化間隔為100 mm,持續進行升柱動作。以液壓支架CAD 圖紙測量的尺寸和角度數據為初始輸入,采用Powell[19]臨近域搜索法進行迭代計算,計算得到后連桿角度、前連桿角度、立柱桿角度、平衡桿角度、掩護梁角度、立柱長度、平衡桿長度的變化曲線,如圖8 所示。可看出各條曲線過渡平滑,說明迭代計算過程中上述各部件的運動是連續的。實驗的最終計算結果與液壓支架傳感器采集的測量值對比見表2,角度平均誤差為0.14°,行程平均誤差為6.3 mm。液壓支架GUD90B雙軸傾角傳感器的誤差為 ±0.3°,GUD500 行程傳感器的誤差為15 mm,對比可知,液壓支架數字孿生模型計算數據均在誤差允許范圍內,符合與真實設備的一致性要求。

表2 液壓支架運動仿真結果Table 2 Hydraulic support motion simulation reaults
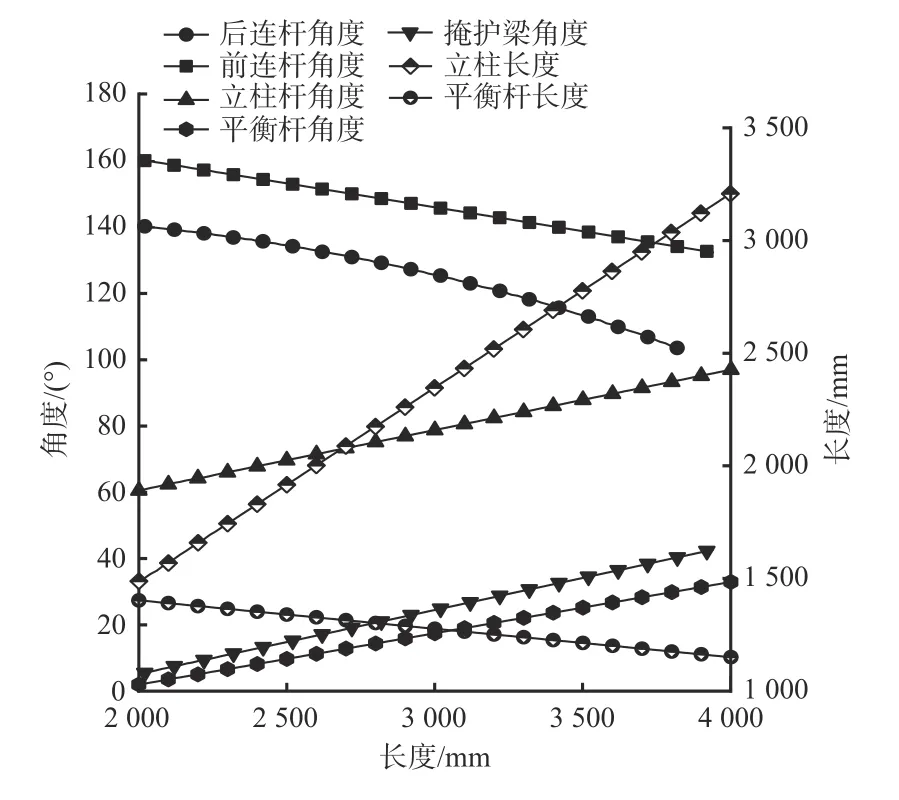
圖8 液壓支架姿態各變量連續變化曲線Fig. 8 Continuous change curves of various variables of hydraulic support attitude
1.3 刮板輸送機數字孿生建模
刮板輸送機是煤礦綜采工作面常用的運輸機械之一,是連接采煤機和液壓支架的橋梁。由于刮板輸送機自身無法主動運動,所以,其智能體只需進行感知和約束控制單元構建。
刮板輸送機感知單元的關鍵傳感器包括溫度、壓力、振動、電流、電壓、功率、傾角傳感器,圍繞電動機、減速器、中部槽進行數據監測感知[20]。
刮板輸送機的控制模型圍繞自身約束及與外部設備的銜接約束進行構建。刮板輸送機相鄰中部槽通過連接銷和連接耳子兩兩連接,其物理允許的最大旋轉角度不超過3°。刮板輸送機與采煤機、液壓支架均有物理銜接約束。采煤機在采空區側的2 個導向滑靴和煤壁側的2 個平滑靴分別騎架在刮板輸送機銷軌和鏟煤板上,起到支撐和導向作用[21];液壓支架的推移活塞桿用插銷連接到中部槽擋煤板上,當進行推溜動作時,中部槽受活塞桿推動往煤壁方向移動[22]。
按照圖3 流程建立了刮板輸送機三維可視化模型,其與真實物理設備的對比如圖9 所示。可看出刮板輸送機三維模型能真實反映刮板輸送機的狀態,滿足虛實一致性要求,證明所建立模型的正確性。
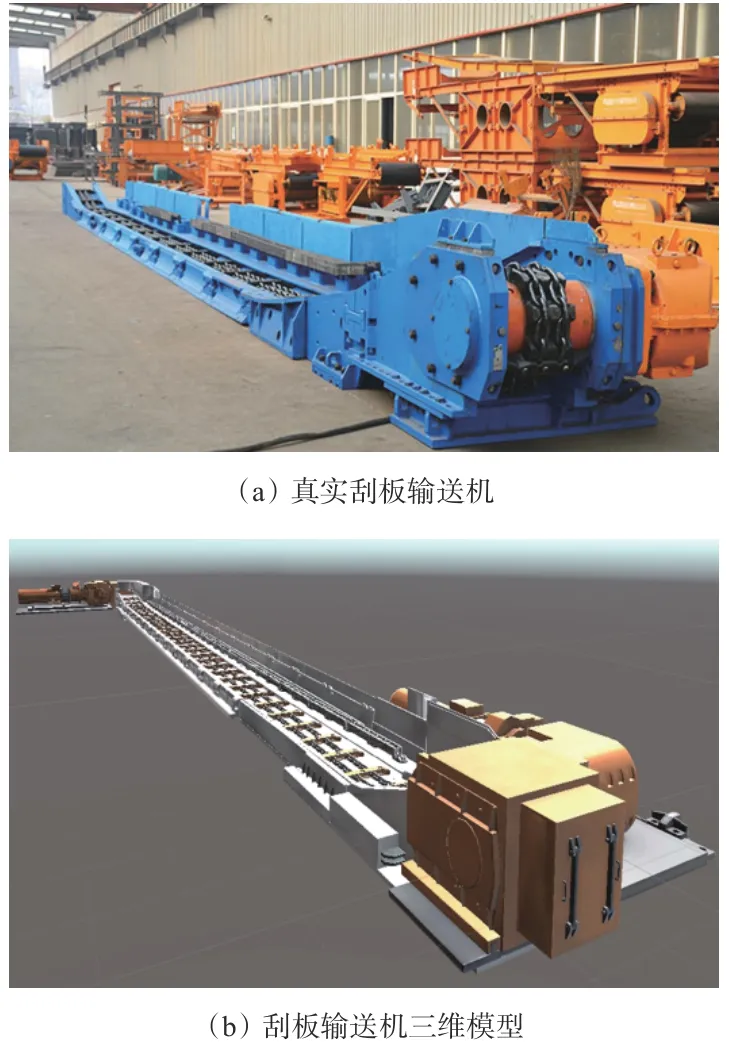
圖9 真實刮板輸送機與三維模型對比Fig. 9 Comparison of real equipment and 3D model of scraper conveyor
2 三機協同工藝離散事件建模及仿真
2.1 三機協同工藝離散事件建模
綜采工作面開采是各個設備互相配合、協同控制,實現安全高效生產。采煤機開采工藝與液壓支架跟機工藝均以圖表結合文字的方式劃分生產階段,以采煤機在工作面的不同位置變化推動開采過程往復進行。該工藝階段的劃分符合離散事件特點,即可操作性與流程性。在完成三機數字孿生建模后,根據其業務階段特點,采用離散事件建模方法構建三機協同工藝模型。以時間軸為基準串聯采煤機、液壓支架動作事件,事件涵蓋要素包括事件名稱、動作執行對象、動作指令、指令持續時間、采煤機位置變化等。其中動作執行對象為采煤機或液壓支架,動作指令即為采煤機、液壓支架智能體執行模塊列舉的動作類型。部分三機協同工藝時序表數據見表3。
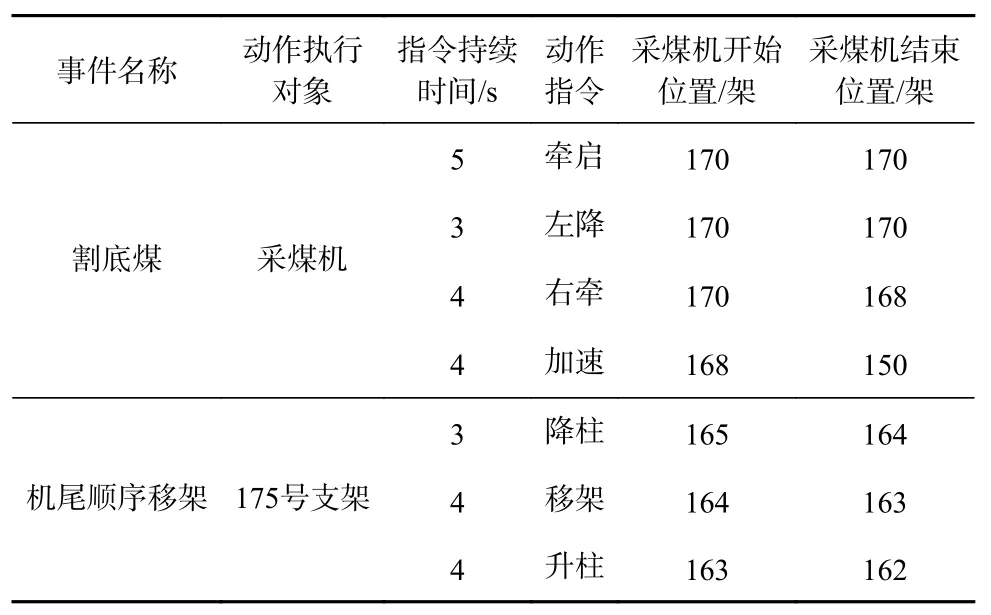
表3 部分三機協同工藝時序表數據Table 3 Partial three machine collaborative process schedule data
建立的三機協同三維模型如圖10 所示,采煤機騎架在刮板輸送機上,刮板輸送機擋煤板與液壓支架推移桿通過插銷連接,液壓支架支護整個綜采工作面,三者協同作業,實現綜采工作面有序開采。
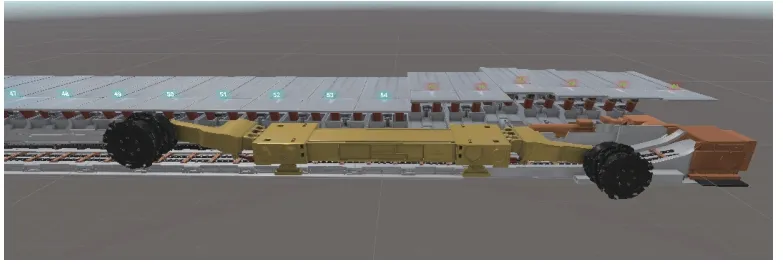
圖10 三機協同三維模型Fig. 10 Three machine collaborative 3D model
2.2 三機協同工藝虛實仿真實驗
為了驗證構建的三機協同工藝模型與真實設備在開采過程中的一致性進行了仿真實驗,并將真實生產日志文件中的工藝過程數據與三機協同工藝時序表仿真數據進行對比,以驗證所建模型的正確性。
以兗礦集團趙樓煤礦某工作面為研究對象,截取綜采集控平臺2022 年4 月的日志文件,文件記錄了綜采工作面生產過程采煤機位置數據、液壓支架架號及動作指令、時間數據,將上述數據過濾提取,形成真實開采過程數據集。將數據集繪制形成圖11(a)所示基于日志文件的采煤機液壓支架動作時序,包含采煤機兩刀煤截割過程及對應的液壓支架跟機動作。結合該工作面開采工藝、跟機工藝文檔對綜采工作面三機模型虛擬仿真初始參數進行設置:采煤機最大牽引速度設為12 m/min,加速到最大速率時間設為5 s;液壓支架數量為175 架,執行端部割三角煤工藝,設定第25 架及第150 架為上下行折返點。完成初始參數設定后,以采煤機位置變化為觸發條件進行虛擬孿生仿真,得到圖11(b)所示時序。將基于日志的時序圖與仿真結果疊加對比,得到圖11(c)。從圖11 可得出如下結論:
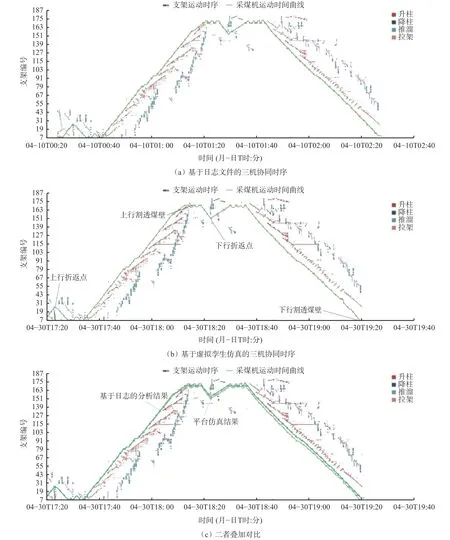
圖11 三機協同時序仿真Fig. 11 Time sequence simulation of three machine collaboration
1) 采煤機整體仿真運行軌跡與真實日志記錄趨勢一致,符合綜采工作面采煤機雙向割煤端部斜切進刀的工藝約束要求。
2) 工作面各個液壓支架時序動作基本一致,仿真結果符合實際生產工藝指令及跟機策略約束。
3) 三機協同工藝模型的虛實對比仿真結果與真實記錄接近,驗證了數字孿生模型的正確性和準確性。
3 結論
1) 提出了綜采工作面三機數字孿生建模與三機協同離散事件混合建模方法。對采煤機、液壓支架和刮板輸送機進行數字孿生建模,對三機協同工藝進行離散事件建模,實現了三機協同過程宏觀層次的建模。
2) 采煤機數字孿生模型的搖臂升降實驗結果表明,模型誤差較小,搖臂傾角平均誤差為2.3°;液壓支架升柱實驗結果表明,與測量數據相比,角度平均誤差為0.14°,行程平均誤差為6.3 mm,測量結果與實驗結果相符;基于真實生產日志的三機協同工藝虛實對比仿真結果表明,所構建的數字孿生模型可以正確反映實際生產過程的真實狀態,與真實裝備符合一致性要求,仿真結果與真實記錄接近,驗證了數字孿生模型的正確性和準確性。
3) 下一步將研究煤礦井下地質環境數字孿生構建方法,形成地質與裝備交互耦合,進一步探究綜采裝備在仿真過程中與環境的交互關系,為綜采工作面虛擬仿真開采、數字孿生技術在煤炭行業的應用提供新思路。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
保健醫苑(2022年5期)2022-06-10 07:46:12
防爆電機(2022年1期)2022-02-16 01:14:06
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
模具制造(2019年3期)2019-06-06 02:10:54
光學精密工程(2016年6期)2016-11-07 09:07:19
航天器工程(2014年5期)2014-03-11 16:35:55
河南科技(2014年18期)2014-02-27 14:14:58
