礦井動目標精確定位技術及優化方法研究
2023-03-18 09:23:56鄭學召嚴瑞錦蔡國斌王寶元何芹健
工礦自動化 2023年2期
鄭學召, 嚴瑞錦, 蔡國斌, 王寶元, 何芹健
(1. 西安科技大學 安全科學與工程學院,陜西 西安 710054;2. 西安交通大學 能源與動力工程學院,陜西 西安 710054;3. 淄礦集團 礦山救護大隊正通中隊,陜西 咸陽 713600)
0 引言
礦井動目標精確定位是實現煤礦日常管理[1]、資源調度[2]、安全監控[3]的重要途徑,并可為災害應急救援提供依據[4],建設礦井動目標精確定位系統是提升煤礦智能化建設水平、煤礦安全生產能力和應急保障能力的必然要求[5]。
隨著我國加速推動數字化轉型、煤礦智能化進程,對礦井動目標定位服務提出了更高要求[6]。許多學者從動目標定位傳輸機制、測量方法、信號濾波方法及目標節點解算算法等方面探索礦井動目標精確定位的優化方法,已經取得豐碩成果。胡青松等[7-8]梳理并分析了典型測距方法、位置計算及優化方法的原理和發展脈絡,提出了大數據背景下智能礦山動目標服務模式。孫哲星[9]基于煤礦井下人員定位的特點,分析了礦井動目標定位技術和測距方法。霍振龍[10]從定位方法、無線通信技術等方面分析了礦井動目標精確定位技術的要求、研究及應用現狀。常琳[11]提出了基于礦山物聯網的動目標定位框架,為礦井動目標定位精度提升提供了新思路。G. P. Hancke 等[12]從煤礦動目標定位服務場景出發分析了精確定位技術的研究現狀和挑戰。然而,這些研究未全面分析動目標精確定位服務的特點和技術要求,且缺少主流與新興定位技術的全面對比,對我國最新產業技術、政策統籌和安全需求下動目標定位的發展趨勢分析不全面。
針對現有礦井動目標精確定位技術及優化方法研究在綜合性能對比,新技術、新方法研究,可持續發展能力提升等方面的不足,本文對現有礦井動目標精確定位技術性能進行了分析,從信號防碰撞方法、誤差控制方法、定位精度優化方法、融合定位方法等方面綜述了定位優化方法的研究現狀,針對其痛點問題展望了未來發展趨勢。
1 礦井動目標定位系統
《煤礦智能化建設指南》中要求礦井動目標系統應當具備人員狀態分析、考勤、調度管理、軌跡展示及分析功能[13]。煤礦應當采用精確定位技術實現井下人、車、移動裝備等目標的精確定位和有效管理,以滿足井下復雜巷道的全覆蓋需求。
1.1 礦井動目標定位系統特點
目前,我國礦井動目標定位系統由定位信標(人員定位卡、車載識別定位卡、采掘裝備定位裝置等)采集動目標的定位信息,將信息傳輸至礦用本安型網絡交換機,再利用現有骨干網絡(工業以太環網、CAN 總線等)傳輸至地面交換機,如圖1 所示。
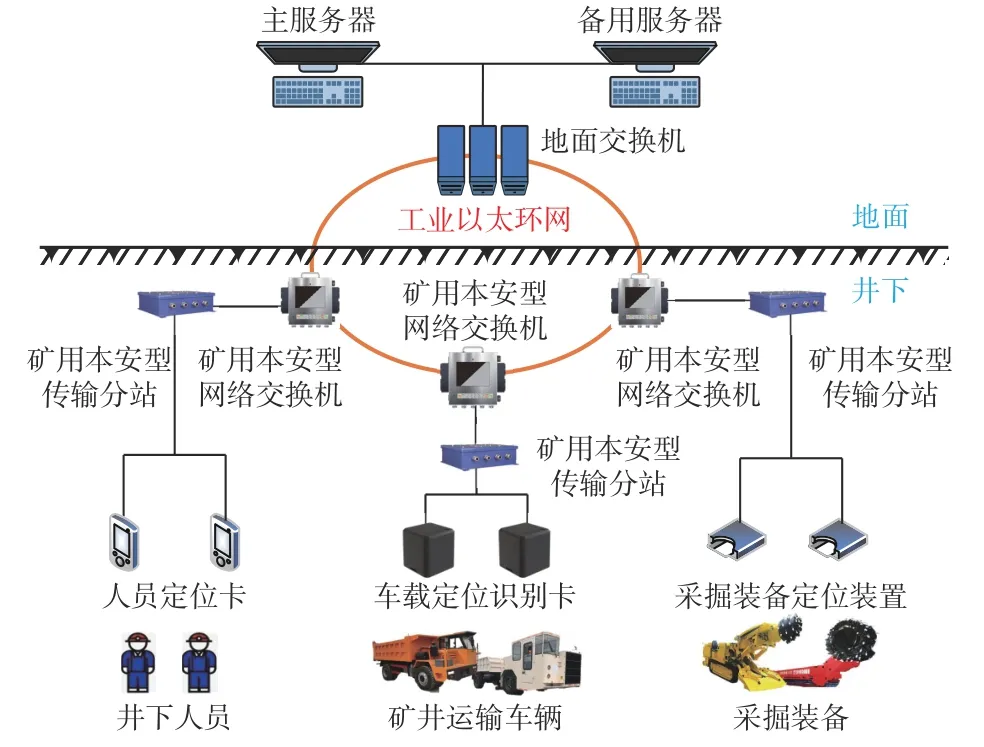
圖1 礦井動目標精確定位系統結構Fig. 1 Structure of precise positioning system for mine moving target
由于煤礦井下特殊工作環境和日益增長的安全要求,現有礦井動目標定位系統不能完全滿足煤礦動目標精確定位需求,面臨著如下難題和挑戰。
1) 井下無線信號傳輸衰減嚴重。巷道形狀、截面大小、壁面粗糙度、圍巖介質、導體和阻擋體等會造成信號多徑傳輸、衰減大,且井下高粉塵、潮濕等惡劣環境也會導致信號衰減增大。
2) 非視距誤差較大。井下巷道狹長,多有分支、傾斜和轉彎,且巷道中有移動人員、裝備和固定裝備等信號傳輸障礙物,造成信號非視距傳輸,引起非視距誤差。
3) 井下電磁環境復雜。井下機電設備眾多,大功率設備數量大,且存在工作面、變電所等設備集中場所,造成電磁環境復雜。
4)人員、車輛及采掘裝備等全覆蓋定位,定位目標數量巨大,且需根據不同目標的移動特點和定位要求實現動靜目標感知。
5) 多系統信息融合聯動性強。礦井動目標精確定位系統各子系統間需通過信息融合共享,實現人與裝備的日常管理及安全閉鎖;礦井動目標精確定位系統需通過與應急廣播、安全監控等系統聯動,增強煤礦安全生產、應急救援能力。
1.2 礦井動目標精確定位系統要求
礦井動目標精確定位系統主要包括人員精確定位系統、車輛及交通管理系統、采掘裝備運動監測及遠程控制系統等。根據不同定位目標和系統功能,對不同系統的定位精度和巡檢周期等提出了不同要求。
1) 人員精確定位系統。為了實現礦井日常安全管理和災后應急救援,需建立能夠掌握人員精確位置的定位系統。人員精確定位系統的特點是定位目標數量大,目標移動速度較慢,對系統單站并發量要求較高,但對巡檢周期要求較低,一般可以選擇2 s 或以上。因此,要求系統定位精度高、數據無缺失、軌跡不漂移、應急保障能力強。
2) 車輛及交通管理系統。為了實現礦井無人駕駛系統、物流管理系統、輔運智能調度系統的準確控制和管理,需建立能夠掌握井下車輛位置和路徑的定位系統。車輛及交通管理系統的特點是定位目標數量中等、目標移動速度大,對系統單站并發量要求低于人員精確定位系統,要求巡檢周期短、即時定位、可靠性高。因為定位巡檢周期越長,目標移動速度越大,動態定位誤差越大。車輛及交通管理系統需要與人員精確定位系統進行融合,實現人車閉鎖,減少由于車輛運輸對人員造成的傷害事故[14]。
3) 采掘裝備運動監測及遠程控制系統。為了實現采掘工作面遠程精確控制,需要建立能夠實現采掘裝備實時位置搜索、路徑分析的定位系統。采掘裝備運動監測及遠程控制系統對網絡傳輸時延敏感,目標移動速度較快,定位精度要求極高,要求系統巡檢周期短,一般不超過500 ms。采掘裝備運動監測及遠程控制系統需要與人員精確定位系統進行融合,識別進入被設定為危險區域的人員,對采掘裝備進行限制或閉鎖,避免自動化生產過程中產生的人員安全隱患[15]。
2 礦井動目標精確定位方法
礦井動目標精確定位方法由定位技術和定位算法組成。目前我國煤礦常用的定位技術包括慣導定位技術、超聲波定位技術、激光定位技術、無線電定位技術等;定位算法分為測距定位算法和非測距定位算法2 類,目前煤礦通常采用測距定位算法。
2.1 定位技術
1) 慣導定位技術。慣導定位技術需要目標配備陀螺儀和加速度計,通過測量目標的加速度、航向等信息進行定位[16]。慣導定位技術無需外部輸入信息,不受外部電磁干擾,短時精度高,穩定性好,但高精度的陀螺儀價格昂貴,定位精度隨目標移動幅度增大而增大,定位誤差隨時間增加而增大。慣導定位技術常應用于采煤機、掘進機等裝備的位姿感知和運動軌跡定位。而井下人員和車輛的數量較多,采用慣導定位技術會導致系統建設成本過高,維護工作量大。因此,慣導定位技術適用于采掘裝備運動監測及遠程控制系統,但不適用于人員精確定位系統和車輛及交通管理系統。
2) 超聲波定位技術。超聲波定位技術主要利用超聲波雷達測距方法進行定位。超聲波在傳輸過程中衰減較大,測距覆蓋距離較短,且非視距誤差較大。因此,超聲波定位技術難以滿足礦井動目標精確定位系統的技術要求,但可用于定位輔助,測量障礙物距離[17]。
3) 激光定位技術。激光定位技術主要利用紅外線測距方法或激光雷達測距方法進行定位。激光定位技術能夠有效避免粉塵干擾,探測距離遠,定位精度較高,但無法進行非視距定位。因此,激光定位技術可應用于采煤機、掘進機等裝備的位姿感知[18],但不適用于人員精確定位系統和車輛及交通管理系統。
4) 無線電定位技術。無線電定位技術具有傳播距離遠、定位精度高、可非視距傳輸等優點,被廣泛應用于礦井動目標精確定位系統。常見無線電定位技術包括射頻識別定位(RFID)、藍牙(Bluetooth)、ZigBee、WiFi、超寬帶(UWB)、5G等[19-21]。常用無線電定位技術的對比見表1。
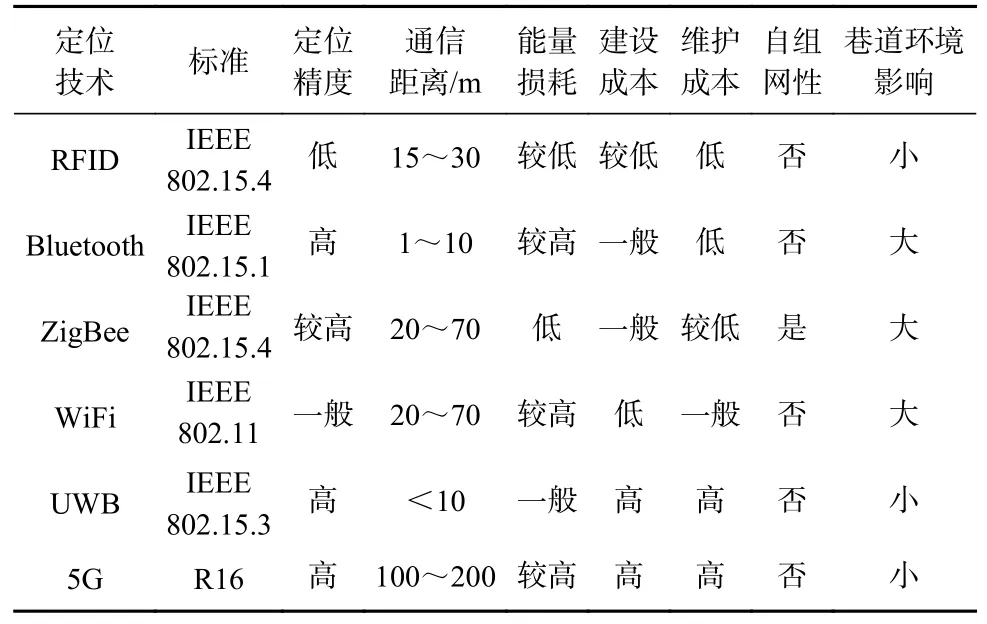
表1 常用無線電定位技術對比Table 1 Common radio positioning technology comparison
2.2 定位算法
定位算法是測量目標節點位置的關鍵,基本測距定位算法包括基于無線信號強度(Receive Signal Strength Indicator,RSSI)測距算法、到達角度(Angleof-Arrival, AOA)測距算法和基于時間測距的定位算法3 種。其中基于時間測距的定位算法包括傳輸時間(Time of Arrival,TOA)定位算法、時間差(Time Difference of Arrival,TDOA)定位算法、飛行時間(Time of Flight,TOF)定位算法、雙程測距(Two-Way Ranging,TWR)定位算法等。許多學者對TWR 定位算法進行了優化,提出了單邊雙向測距(Single-Sided Two-Way Ranging,SS?TWR)定位算法、雙邊雙向測距(Double-Sided Two-Way Ranging,DS?TWR)定位算法、對稱雙邊雙向測距(Symmetric Double-Sided Two-Way Ranging,SDS?TWR)定位算法、非對稱雙邊 雙 向 測 距(Asymmetic Double-Sided Two-Way Ranging,ADS?TWR)定位算法等。衡量礦井動目標定位算法的主要性能指標包括定位精度、建設成本、受巷道環境影響大小、受定位卡和分站時鐘頻率偏移影響大小、是否需要分站與定位卡時鐘同步、是否需要分站間時鐘同步。常用定位測距方法的對比見表2[22]。
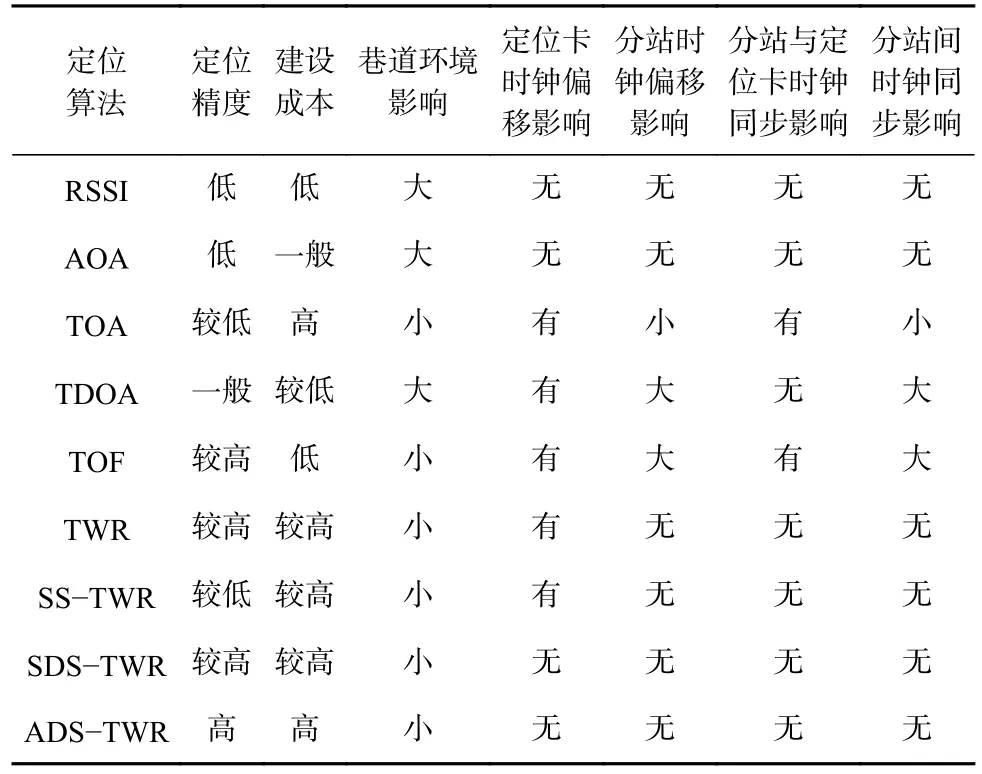
表2 常用測距定位算法對比Table 2 Comparison of common ranging and positioning algorithms
3 礦井動目標精確定位優化方法
研發高效、經濟、精確的礦井動目標定位系統是煤礦智能化開采要求下礦井動目標定位面臨的新挑戰。從信號傳輸手段、定位誤差控制方法、目標節點解算算法等多方面優化定位方法可以有效提升系統的精度、效率和經濟性。
3.1 信號防碰撞方法
礦井動目標定位系統需實現井下人、車、重點設備全覆蓋,要求系統具有高并發能力。多組數據同時返回可能會引起信號碰撞,導致時延增加、誤差增大、漏讀率增大等。研究信號防碰撞方法可有效避免由于信號碰撞導致識別準確率下降等問題。
時分多路復用技術是通過將可供使用的通路按時間進行分割,分配給多個標簽,使得不同的信號在規定時間間隔內傳出,解決無線通信信號碰撞問題[23],是目前煤礦實際應用最廣泛的防碰撞技術,但時隙利用率低,易造成資源浪費。為了避免信道資源浪費,陳鴻[24]提出了一種改進的二進制指數退避算法,有效避免了爭用碰撞。王飛[25]提出了一種基于雙信道方式和時分方式的防碰撞方法,利用雙信道方式(圖2)將讀卡器的入網信道和測距信道分離,采用時分方式實現定位卡信號相互分離,最大并發識別量為200。蘇健等[26]提出了一種基于空閑時隙消除的二進制分裂算法,引入單比特狀態標志位,在進行信號傳輸前先判斷是否發生時隙碰撞,避免了信號冗余傳輸。
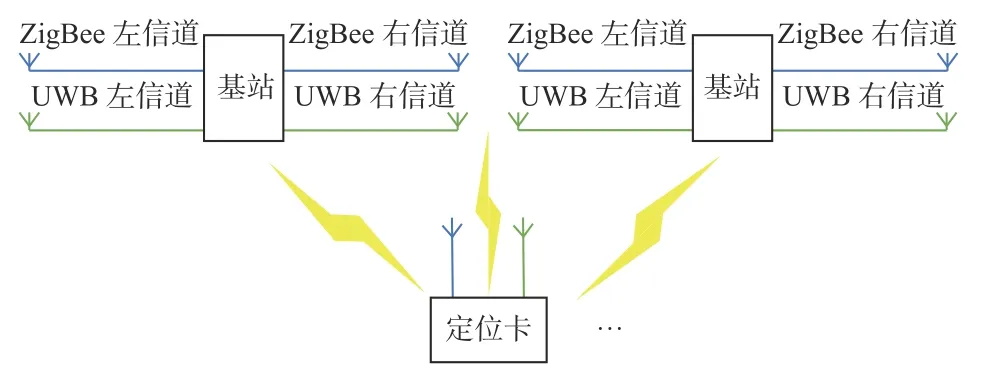
圖2 雙信道方式應用原理Fig. 2 Application principle of dual-channel mode
3.2 誤差控制方法
多種因素導致目前所有測距方法均具有誤差,RSSI 測距方法受非視距誤差影響較大,TDOA、TOA 測距方法對時間準確性要求嚴格。研究誤差消除、抑制和利用的方法是優化定位方法的思路之一。
濾波處理是抑制誤差影響的有效手段,卡爾曼濾波算法利用線性系統狀態方程對定位信號進行最優估計,被廣泛利用于誤差控制,但對非線性信號的處理效果不理想。邵小強等[27-28]將非視距(Non-Line of Sight,NLOS)時延分為巷道固定時延和巷道隨機時延,采用幾何投影算法改善固定時延的影響,利用卡爾曼濾波算法消除隨機時延。提出引入最大加權方法處理RSSI 值,通過在濾波器中引入閾值避免信號盲目處理,改善了卡爾曼濾波的應用效果,對研究NLOS 時延的分類抑制有很好的指導意義。李迎喜[29]提出了基于無線傳感器時鐘同步協議(Timingsynchronization Protocol for Sensor Networks,TPSN)和參考廣播同步(Reference Broad-cast Synchronization,RBS)算法的改進時間同步算法,將廣播時間同步和層次型結構相結合,在物理層附加時間信息,實現了精確時間同步,同時極大地降低了能量損耗。
3.3 定位結果優化方法
引起定位誤差的因素眾多,通過誤差控制方法難以完全消除誤差對定位精度的影響。研究信號處理和優化目標節點解算算法,可以增強信號有效性,優化解算結果,提升系統定位精度。
經典的目標節點解算算法有三邊定位法、三角定位法、最小二乘法等,為進一步提高定位精度,朱光[30]提出了一種改進RSSI 加權質心算法,通過求解與定位節點測算距離最小的3 個參考節點構成的三角形質心確定位置,提升了定位精度和穩定程度。卞佳興等[31]通過引入一個特定時延改進了雙向測距算法,獲得了更高的測距精度,并基于Jacobi 迭代算法求解雙曲面非線性方程組,解決了非迭代算法解算困難的問題。莫樹培等[32]采用分段估計權值的加權最小二乘多變定位算法,提高了定位精度,通過權值動態修正提升穩定性。張冉喬等[33]研究了4 種小波基函數對去噪效果的影響,確定了啟發式閾值估計準則和軟閾值函數,削弱了UWB 定位異常值對定位精度的影響,為提高礦井動目標精確定位精度提供了借鑒思路。唐麗均等[34]提出采用高精度的灰色預測模型預測距離,該方法精度高于傳統算法且不受測距誤差影響。賀潔茹等[35]構建了粒子群算法與Taylor 迭代算法結合的PT 算法,降低了解算誤差,實現了厘米級精確定位。
3.4 融合定位方法
現有定位方法難以滿足礦井動目標精確定位系統的要求。研究多種定位技術或測距方法的融合定位方法,可以集不同技術的優勢彌補單一定位技術的不足,同時能夠增強系統的應急保障能力,提升系統的效率。
吳靜然等[36]設計了一種基于改進RSSI 指紋定位算法和行人航跡推算(Pedestrian Dead Reckoning,PDR)算法的礦井人員融合定位系統,采用GS1011控制器和MPU9150 慣性傳感器構成智能終端,將采集的慣性傳感器、RSSI 和時間戳數據通過井下WiFi 網絡上傳至地面監控中心定位服務器,定位服務器采用擴展卡爾曼濾波對RSSI 指紋定位算法和PDR 算法的定位信息進行融合,實現井下人員定位。儀玉杰等[37]建立了基于UWB 和PDR 信息融合定位的擴展卡爾曼濾波器模型,有效減小了定位解算點的跳躍幅度,解決了UWB 技術在復雜環境下易出現定位缺失的問題,為礦井動目標精確定位提供了新思路。劉世森[38]設計了基于UWB 和RFID 融合的煤礦井下人員定位系統,利用RFID 實現人員區域定位及管理,利用UWB 實現人員精確定位,降低了系統建設成本。李宗偉等[39]提出了一種基于TOF測距定位和捷聯慣導定位的融合定位方法,利用TOF 測距定位實現近距離動目標定位,利用捷聯慣導定位實現遠距離動目標定位,減少了定位盲區和定位基站的布置數量,降低了系統建設成本。王紅堯等[40]采用SDS?TWR 與TOF 相結合的方法進行測距,通過粒子群優化支持向量機算法解算動目標移動路線,并將TDOA 算法與Chan 算法進行融合,實現了動目標精確定位。
4 存在的問題
1) 信號防碰撞算法的綜合性仍需改進。現有研究通過多路時分復用、雙信道、空閑時隙消除等方式有效解決了信號碰撞問題,但缺乏對沖突監測機制和沖突后恢復機制的研究;對定位卡防碰撞算法的研究較多,但缺乏對基站防碰撞算法的研究;研究多集中在靜態環境下,缺乏動態環境下的研究。
2) 測距誤差控制手段的效率有待提升。現有誤差控制思路主要分為2 種,一是改進測距方法以減少定位結果的影響因素,二是通過研究信號處理方法優化解算結果。一般通過增加信號傳輸過程、引入修正因子、多方法協作定位等方式實現誤差控制,存在算法復雜、計算時間長、收斂速度緩慢、通信開銷較大等問題。
3) 融合定位方法在生產現場中的應用尚不成熟。目前針對融合定位方法的研究多為理論模擬研究,系統的實踐研究較少,未能得到現場應用驗證;且多數研究中將巷道模型簡化為一維模型或二維模型,實際巷道模型應為復雜三維模型,三維定位精度仍有待提升。
4) 礦井動目標精確定位系統應急救援輔助作用未充分發揮。現有研究中多數只提到動目標精確定位系統可以在災后應急救援中提供精確的人員位置信息和運動軌跡,但對如何提升系統自身災害抵御能力、應急保障能力及系統的應急救援輔助能力的研究仍為空白。
5 發展趨勢
煤炭將持續占據我國能源結構主體地位,煤礦行業安全形勢仍然嚴峻[41-42]。我國對礦井動目標精確定位系統的要求不斷提升,未來主要發展趨勢如圖3 所示。
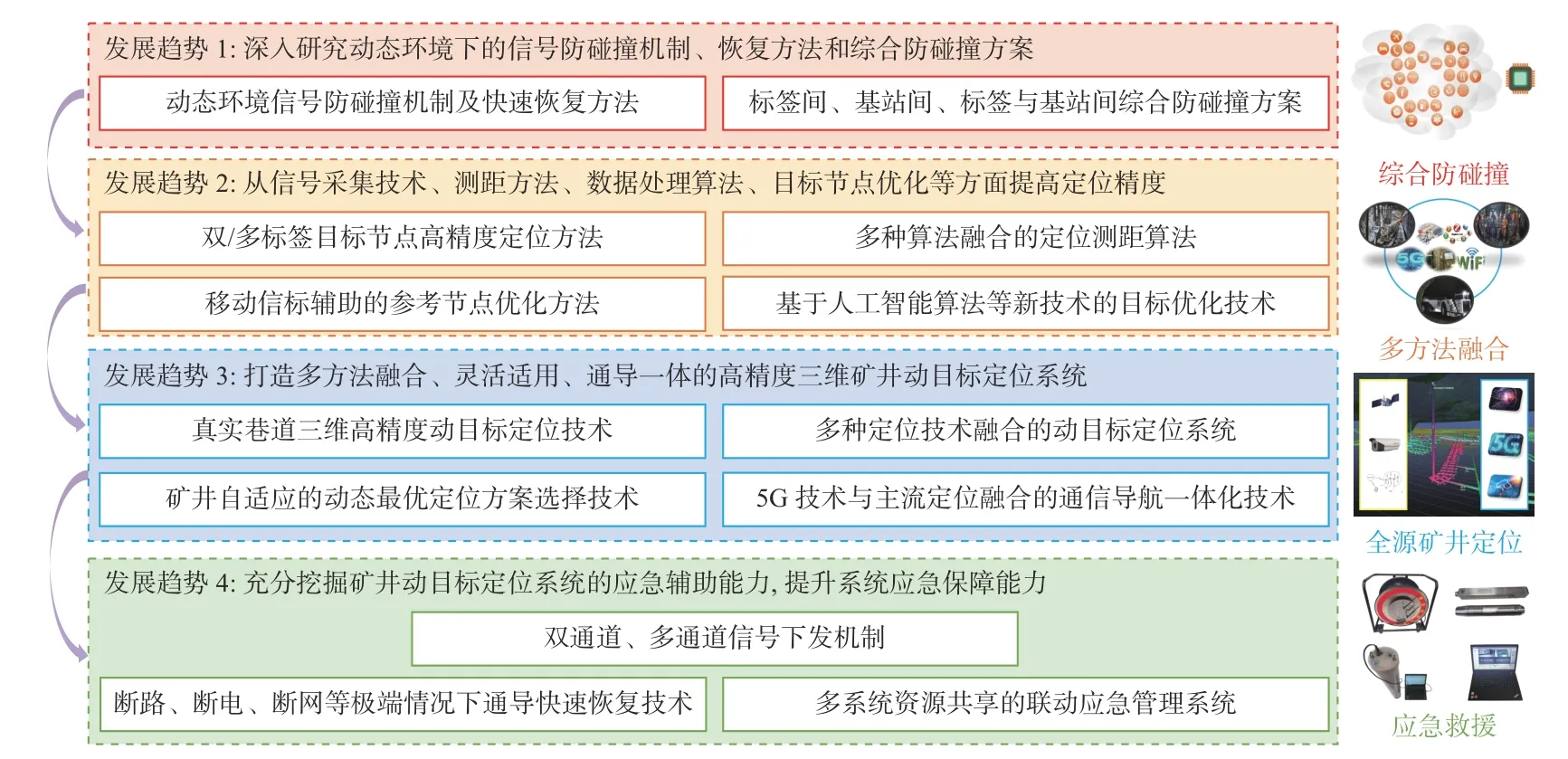
圖3 礦井動目標精確定位技術發展趨勢Fig. 3 Development trend of mine moving target precise positioning technology
1) 深入研究動態環境下信號防碰撞機制、恢復方法及綜合防碰撞方案。與靜態環境下較為理想的信號傳輸條件相比,動態環境變化引起的信號干擾強度變化和信號衰減程度變化均會導致防碰撞處理過程復雜化。① 研究動態環境下信號防碰撞機制,完善信號沖突機制和沖突后恢復機制,研究碰撞后快速恢復方法,可有效避免由于環境變化造成的漏讀率升高。② 設計標簽間、基站間、標簽與基站間信號防碰撞的綜合方案,對完善信號防碰撞機制發揮著重要作用。
2) 從信號采集技術、測距方法、數據處理算法和目標節點優化等方面提高定位精度。針對不同動目標采用雙/多標簽定位模式,如人員等橫/縱向距離較短的目標采用雙標簽定位,采煤機等橫/縱向距離較長的目標采用雙/多標簽定位,構造多標簽優化函數以提高定位精度[43];采用部分裝有慣導設備或激光定位裝置的目標作為移動信標輔助定位,不僅可以提升定位精度,也可以降低信標節點數量;應用深度學習等人工智能算法進行誤差學習,通過有效利用測距誤差優化定位精度,同時應充分平衡優化算法的計算時間成本和精度提升水平,確保優化方案具有實用性;采用數據融合思想,研究多種算法融合的測距算法,充分利用不同類型數據包含的信息也是提高定位精度的研究思路之一。
3) 打造多方法融合、靈活適用、通導一體的高精度三維礦井動目標定位系統。引入高度差,建立復雜的三維定位模型,提升動目標三維定位精度,使系統滿足日益增長的安全需求;研究多種定位技術或測距算法融合的精確定位系統,開展融合定位系統實踐研究,提升系統的可靠性、經濟性和實用性;研究全源礦井自適應動態定位系統,動態選擇滿足當前礦井定位需求的最優設備組合和定位測距算法;充分利用5G 等新興技術的通信導航一體功能,與主流定位技術融合,大幅度提升定位性能的同時節約資源。
4) 充分挖掘礦井動目標定位系統的應急輔助能力,提升系統應急保障能力。建立雙通道、多通道的信號下發方式,不僅可以降低系統漏讀率,還能夠提升系統的應急通信能力和災害抵御能力;實現礦井動目標精確定位系統與井下廣播系統、安全監控系統等系統互通互聯、及時響應,實現對井下人員和重要物資的定位安全保障;針對災害后可能出現的斷路、斷電、斷網等極端情況特點研究災后通信網絡重構與定位系統快速恢復技術[5],提供災后救援人員的定位安全保障。
6 結語
礦井動目標精確定位系統是保障煤礦安全生產、日常管理和應急救援的重要系統。建立智能、高效、準確的精確定位系統,需要針對不同動目標的特點和定位要求選用合適的定位技術,通過信號防碰撞技術、測距誤差控制技術、目標節點優化解算算法和多種技術融合定位等方法實現精確定位。為了適應動目標精確定位需求,未來可以進一步研究動態信號沖突機制和碰撞快速恢復方法,提升信號防碰撞方法的綜合性;通過雙/多標簽定位模式、移動信標輔助定位技術、基于人工智能算法的誤差學習方法等全面提高定位精度,同時需平衡構建難度和時間成本,提升系統效率;研究精確定位傳輸、測距、解算各階段的融合定位方法,積極開展5G 等新建設成果與主流定位技術的融合應用,動態適應礦井的現實定位需求;通過提升系統抗災能力、多系統聯動響應、災后通信網絡與定位系統快速重構等充分發揮系統的應急救援輔助能力。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
