SWISS整流器的自適應(yīng)反步控制
2023-03-16 11:10:45王吉濤賈云飛王怡斐葛孟娜
哈爾濱理工大學(xué)學(xué)報 2023年5期
王吉濤 賈云飛 王怡斐 葛孟娜

摘? 要:針對PI控制SWISS整流器的動態(tài)抗擾動性能較弱的問題,以SWISS整流器等效電路的狀態(tài)方程為基礎(chǔ),結(jié)合自適應(yīng)反步控制的基本原理,設(shè)計SWISS整流器以直流側(cè)負(fù)載為系統(tǒng)不確定性參數(shù)的自適應(yīng)反步控制器,并對其穩(wěn)定性進(jìn)行證明。仿真對比分析結(jié)果表明,相較于傳統(tǒng)雙閉環(huán)PI控制,自適應(yīng)反步控制的SIWSS整流器具有更優(yōu)越的穩(wěn)態(tài)輸出特性和抗負(fù)載突變擾動等動態(tài)響應(yīng)性能,并通過基于RT_BOX的半實物實驗平臺進(jìn)一步驗證了仿真結(jié)果的正確性和自適應(yīng)反步控制策略的有效性。
關(guān)鍵詞:SWISS整流器;自適應(yīng)反步控制;PI控制;穩(wěn)態(tài)特性
DOI:10.15938/j.jhust.2023.05.003
中圖分類號: TM461
文獻(xiàn)標(biāo)志碼: A
文章編號: 1007-2683(2023)05-0019-08
Adaptive Backstepping Control of SWISS Rectifier
WANG Jitao,? JIA Yunfei,? WANG Yifei,? GE Mengna
(School of Electrical and electronic Engineering, Harbin University of Science and Technology, Harbin 150080, China)
Abstract:Aiming at the weak dynamic anti disturbance performance of PI controlled Swiss rectifier, based on the state equation of the equivalent circuit of SWISS rectifier and combined with the basic principle of adaptive backstepping control, an adaptive backstepping controller of SWISS rectifier with load as the system uncertain parameter is designed, and its stability is proved. The simulation results show that compared with the traditional double closed-loop PI control, the adaptive backstepping control SWISS rectifier has better steady-state output characteristics and dynamic response performance against sudden load disturbance. The hardware in the loop experimental platform of box further verifies the correctness of the simulation results and the effectiveness of the adaptive backstepping control strategy.
Keywords:SWISS rectifier; adaptive backstepping control; PI control; steady characteristics
收稿日期: 2022-05-19
基金項目: 黑龍江省科技廳留學(xué)歸國人員基金(LC05C05).
作者簡介:
賈云飛(1997—),男,碩士研究生;
王怡斐(1997—),女,碩士研究生.
通信作者:
王吉濤(1971—),男,工程師,E-mail:131817353532@163.com.
0? 引? 言
SWISS整流器作為一種新型的三相降壓型功率因數(shù)校正電路,具有輸出電壓寬范圍內(nèi)可調(diào)、開關(guān)損耗低和效率高,同時其諧波電流注入網(wǎng)絡(luò)可以大大減小網(wǎng)側(cè)輸入電流的畸變率等優(yōu)點,在電動汽車大功率快充領(lǐng)域具有非常廣闊的應(yīng)用前景[1-2]。文[3-5]在六開關(guān)降壓型功率因數(shù)校正電路拓?fù)浼捌淇刂品椒ǖ幕A(chǔ)上,改進(jìn)提出了SWISS整流器最初的拓?fù)浣Y(jié)構(gòu)及其雙閉環(huán)PI控制策略,但是傳統(tǒng)的PI控制是對系統(tǒng)近似線性化處理后加以控制[6],逐漸無法滿足工程實際應(yīng)用中更高的控制性能需求。為了滿足各種工況下的性能要求,涌現(xiàn)了許多針對SWISS整流器的控制策略,包括單周期控制[7],預(yù)測控制[8],滑模控制[9],以及模糊PI控制[10]等。
SWISS整流器是一種根據(jù)輸出直流信號的反饋進(jìn)行控制的非線性系統(tǒng),并且在實際工程情況中,輸出側(cè)所接負(fù)載隨時可能發(fā)生變化,具有不確定性。反步控制[11]是一種適用于嚴(yán)格反饋系統(tǒng)的非線性控制設(shè)計方法,自適應(yīng)控制[12]可以減小不確定參數(shù)對系統(tǒng)穩(wěn)定性造成的負(fù)面影響,將這兩種控制策略結(jié)合的自適應(yīng)反步控制[13],可以實現(xiàn)對SWISS整流器的非線性和負(fù)載不確定性的針對性控制,因此本文將該非線性控制策略應(yīng)用于SWISS整流器以提高系統(tǒng)的整體性能。
1? 整流器的等效電路模型
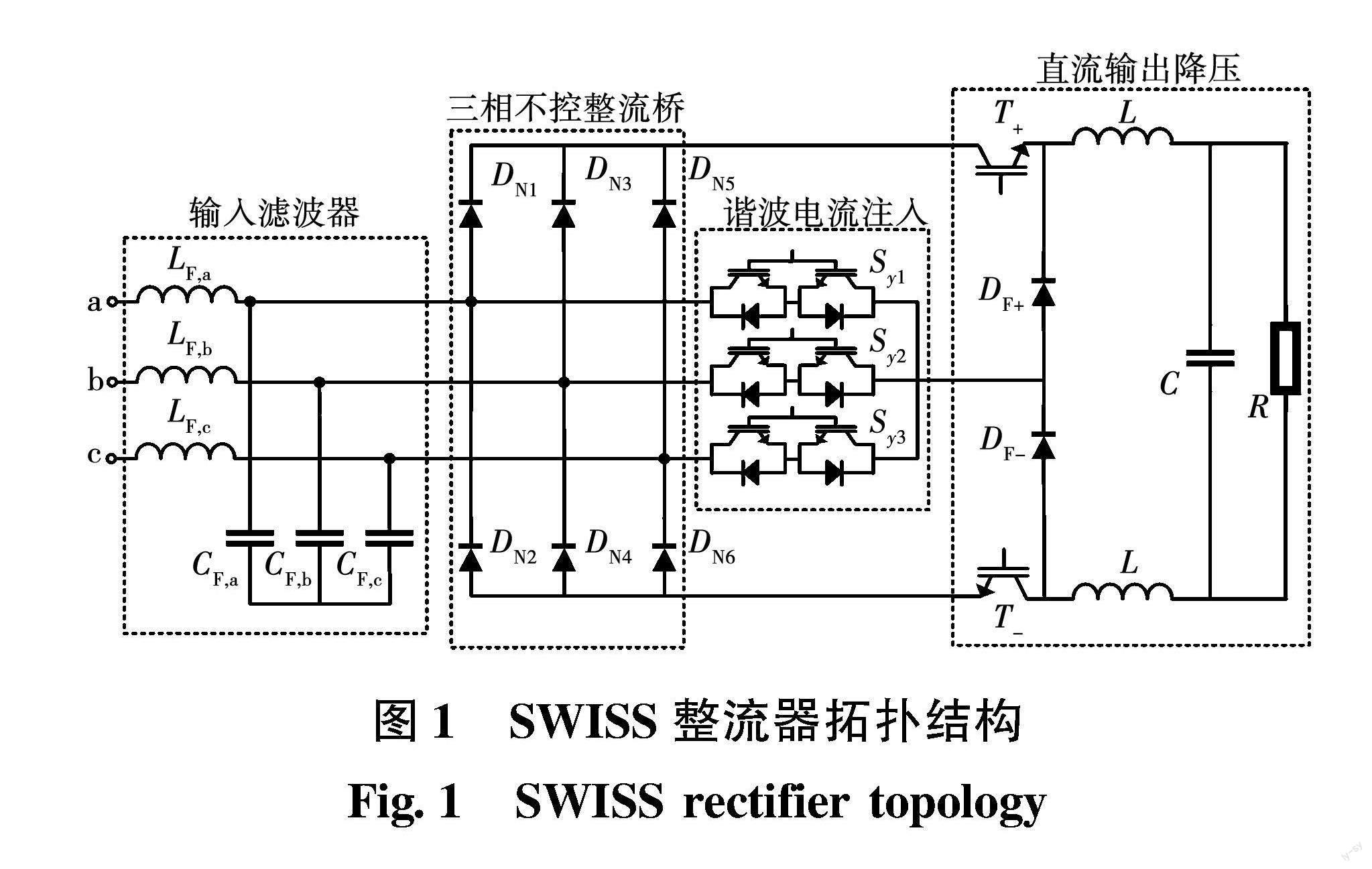
傳統(tǒng)的SWISS整流器電路拓?fù)浣Y(jié)構(gòu)如圖1所示,理想的三相交流電源經(jīng)過LC濾波器后再接三相不可控整流橋,根據(jù)其整流功能特性可知,三相交流電流的波形在電源的一個正(或負(fù))半周的導(dǎo)通相位角為120°,其中有60°的死區(qū),電流波形嚴(yán)重畸變。為了使三相電流波形與電壓同相位運行,諧波電流注入電路在電流死區(qū)內(nèi),導(dǎo)通對應(yīng)相開關(guān),引入直流側(cè)電流以補償死區(qū),使得各相電流相位跟隨電壓,實現(xiàn)功率因數(shù)校正。兩個DC-DC降壓電路上下并聯(lián)組成輸出降壓電路部分,其中快速開關(guān)管T+和T-與諧波注入電路的開關(guān)管以特定的控制邏輯配合工作使SWISS整流器實現(xiàn)PFC(power factor correction,PFC)功能并且輸出穩(wěn)定的直流電壓和電感電流[14]。
根據(jù)任意時刻三相電壓的數(shù)值大小關(guān)系,可以將一個電源基波周期內(nèi)的三相輸入電壓分為6個扇區(qū),每個扇區(qū)60°,如圖2所示。
在每個扇區(qū)內(nèi),各相電壓大小關(guān)系都是固定不變的,在任何時刻都有其中某一相電壓處于其他兩相電壓之間,此時該相電流為零,即處于60°的電流死區(qū)。控制諧波注入電路中對應(yīng)相的開關(guān)管導(dǎo)通對此相輸入電流死區(qū)進(jìn)行補償,即任何時刻諧波注入電路中的3個雙向開關(guān)有且只有一個處于導(dǎo)通狀態(tài)。以同樣的原理分析其余扇區(qū)后可以得到一個基波周期內(nèi)按扇區(qū)劃分的諧波注入電路各開關(guān)管控制邏輯信號如表1所示,其中0代表關(guān)閉,1代表導(dǎo)通。
對于輸出降壓部分的兩個快速開關(guān)管T+和T-,假設(shè)其開關(guān)頻率足夠高且遠(yuǎn)遠(yuǎn)大于電源額定頻率,對于輸出電感L,假設(shè)其電感值較大且忽略電流高頻紋波,在此假設(shè)條件下,就可以將每一個采樣周期內(nèi)的輸出直流側(cè)電感電流iL近似認(rèn)為是一個恒定不變值IDC。在扇區(qū)1中,根據(jù)兩個快速開關(guān)管的導(dǎo)通狀態(tài),SWISS整流器具有4種不同的工作模態(tài),如圖3所示。
采用狀態(tài)空間平均建模法對四種工作模態(tài)進(jìn)行開關(guān)周期平均建模[15-16],最終得到SWISS整流器的狀態(tài)空間平均數(shù)學(xué)模型為
2LdiLdt=32MUm-uC
CduCdt=iL-uCR
uo=uC(1)
式中:uC為輸出側(cè)電容的平均電壓;uo為負(fù)載直流電壓;iL為輸出側(cè)電感的平均電流;M為調(diào)制參數(shù);Um為輸入側(cè)三相對稱交流電壓的幅值。
對式(1)的狀態(tài)空間平均模型進(jìn)行分析并與基本DC-DC電路類比可得,調(diào)制參數(shù)M可以類比為基本DC-DC電路的開關(guān)管T的占空比,1.5Um可以類比為基本DC-DC電路的輸入直流電源E,則可以得到SWISS整流器相對應(yīng)的理想等效電路模型為如圖4所示的基本DC-DC電路。
2? SWISS整流器的自適應(yīng)反步控制
2.1? 自適應(yīng)反步控制器設(shè)計
假設(shè)SWISS整流器中的元件均為理想元件,即開關(guān)管的導(dǎo)通與關(guān)斷沒有損耗且無管內(nèi)壓降,各儲能元件的寄生電阻為零,系統(tǒng)工作在連續(xù)工作模式(continuous conduction mode,CCM)。得到SWISS整流器等效DC-DC電路模型的狀態(tài)方程為
1=-1RCx1+1Cx2
2=-1Lfx1+ELfμ(2)
式中:x1為輸出側(cè)電容的平均電壓uc,即等效電路模型的輸出直流電壓uo;x2為輸出側(cè)電感的平均電流iL;E為等效輸入直流電源;μ為所設(shè)計自適應(yīng)反步控制器的控制律,即等效開關(guān)管T的占空比。
在對SWISS整流器的性能進(jìn)行研究分析時,負(fù)載調(diào)整率是一項研究其動態(tài)性能的重要指標(biāo)。為了提高SWISS
整流器在負(fù)載突變時的各項性能指標(biāo),將負(fù)載R作為自適應(yīng)反步控制器中的不確定參數(shù)進(jìn)行處理。
令θ=1/R,則狀態(tài)方程變?yōu)?/p>
1=-θCx1+1Cx2
2=-1Lfx1+ELfμ(3)
根據(jù)自適應(yīng)反步控制的基本原理,SWISS整流器的自適應(yīng)反步控制器設(shè)計步驟如下:
第一步,定義輸出直流電壓誤差變量
z1=x1-ud(4)
式中:ud為狀態(tài)變量x1的期望值,即系統(tǒng)輸出電壓參考值。對式(4)求導(dǎo)并將式(3)代入得
1=1-d=-θCx1+1Cx2-d(5)
定義輸出電感電流誤差變量為
z2=x2-α1(6)
式中:α1為中間虛擬控制量,在后續(xù)控制器設(shè)計中給出其詳細(xì)公式。為了保證子系統(tǒng)(5)的漸近穩(wěn)定,選取狀態(tài)變量x1的Lyapunov函數(shù)為
V1=(z1+x1)22(7)
對式(7)求導(dǎo)得
V·1=(z1+x1)(1+1)(8)
將式(4)和式(5)代入式(8)得
V·1(z1+x1)(21-d)=
2(z1+x1)1+d2=
2(z1+x1)-θCx1+1Cz2+1Cα1-d2(9)
設(shè)計中間虛擬控制量為
α1=θ^x1+Cd2-c1C(z1+x1)(10)
式中:c1>0為設(shè)計參數(shù), θ^為系統(tǒng)不確定參數(shù)θ的估計值,定義θ~=θ-θ^為不確定參數(shù)的估計誤差。
將所設(shè)計的中間虛擬控制量代入求導(dǎo)之后的Lyapunov函數(shù)中得
V·1=2(z1+x1)-θCx1+1Cz2+1Cα1-d2=
2(z1+x1)x1C(θ^-θ)+1Cz2-c1(z1+x1)=
-2c1(z1+x1)2+2C(z1+x1)(z2-x1θ~)(11)
第二步,對式(6)求導(dǎo)得
2=2-1=-1Lfx1+ELfμ-1(12)
求取中間虛擬控制量的導(dǎo)數(shù),對式(10)求導(dǎo)并將式(3)和式(5)代入其導(dǎo)數(shù)結(jié)果后整理得
1=θ^·1+Cd2-c1C(1+1)=
θ^·-θCx1+1Cx2+Cd2-c1C2Cx2-2θCx1-d=
2c1-θ^·C(θx1-x2)+Cd2+c1d(13)
將式(13)代入式(12)得
2=2-1=-1Lfx1+ELfμ-1=
-1Lfx1+ELfμ-2c1-θ^·C(θx1-x2)-
Cd2+c1d(14)
為了保證此系統(tǒng)的穩(wěn)定性,選取Lyapunov函數(shù)
V2=V1+12z22+12γθ~2(15)
對上式求導(dǎo)得
V·2=V·1+z2z+1γθ~θ~·(16)
式中:γ為大于零的任意常數(shù),稱為不確定參數(shù)的自適應(yīng)增益。
將式(8)、(11)和(14)代入上式化簡整理得
V·2=V·1+z2z+1γθ~θ~·=
-2c1(z1+x1)2+2C(z1+x1)(z2-x1θ~)+(x2-
α1)
-1Lfx1+ELfμ-2c1-θ^·C(θx1-x2)-Cd2+
c1d+
1γθ~θ~·=
-2c1(z1+x1)2+(x2-
α1)
2C(z1+x1)-1Lfx1+ELfμ-2c1-θ^·C(θx1-x2)-
Cd2+c1d+θ~1γ(θ-θ^·)-2Cx1(z1+x1)(17)
為了除去V·中的不確定項,即上式中的第二項和第三項,可選取自適應(yīng)律和控制律為
θ^·=θ-2γCx1(z1+x1)(18)
μ=LfE-c2(x2-α1)-2C(z1+x1)+1Lfx1+
2c1-θ^·C(θx1-x2)+Cd2+c1d(19)
式中c2>0為設(shè)計參數(shù)。
式(18)所示的自適應(yīng)律和式(19)所示的控制律即為SWISS整流器的自適應(yīng)反步控制器。
2.2? 穩(wěn)定性分析
為了證明所設(shè)計自適應(yīng)反步控制器是穩(wěn)定的,將式(18)和(19)代入式(17)得
V·2=-2c1(z1+x1)2-c2(x2-α1)2(20)
顯然,V·2<0為負(fù)定的,根據(jù)李雅普諾夫第二方法理論,所設(shè)計的由式(18)和(19)構(gòu)成的自適應(yīng)反步控制器是全局漸進(jìn)穩(wěn)定的。
根據(jù)SWISS整流器等效電路模型可知,式(19)所設(shè)計控制律μ為等效開關(guān)管T的占空比,即調(diào)制參數(shù)M。根據(jù)SWISS整流器工作原理可知,調(diào)制參數(shù)M為SWISS整流器輸出降壓部分兩個快速開關(guān)管T+和T-的占空比調(diào)制信號。
將SWISS整流器的輸出直流電壓、電感電流和電壓參考值反饋到自適應(yīng)反步控制器后得到控制律μ=M,比上三相交流相電壓幅值Um之后與輸入交流電壓的最大值和最小值的絕對值相乘,并與載波PWM調(diào)制之后就可以得到兩個開關(guān)管的占空比控制信號。最終可以得到SWISS整流器的自適應(yīng)反步控制策略框圖如圖5所示。
3? 仿真分析
為了驗證所設(shè)計的自適應(yīng)反步控制器的可行性,根據(jù)式(18)和式(19),在Simulink中搭建自適應(yīng)反步控制下的 SWISS整流器仿真模型。主電路仿真參數(shù)如表2所示,自適應(yīng)反步控制器中參數(shù)取c1=50000,c2=83000,自適應(yīng)增益γ=0.02。
取仿真時間為0.25s,設(shè)定輸出電壓參考值為350V,在0.15s時將其變?yōu)?50V,在0.05s時設(shè)置負(fù)載縮小一半,即從81Ω突降為40.5Ω,0.1s時突增為原額定阻值81Ω。最終得到基于自適應(yīng)反步控制的SWISS整流器輸入側(cè)A相電壓電流、輸出直流電壓和電感電流波形如圖6所示。
根據(jù)仿真結(jié)果表明,自適應(yīng)反步控制下的SWISS整流器可以在實現(xiàn)功率因數(shù)校正功能的同時輸出穩(wěn)定的直流電壓和電流,驗證了所設(shè)計SWISS整流器的自適應(yīng)反步控制器的可行性和正確性。
3.1? 穩(wěn)態(tài)特性對比分析
為了驗證自適應(yīng)反步控制策略相比于傳統(tǒng)雙閉環(huán)PI控制策略在SWISS整流器穩(wěn)定工作時所具有的優(yōu)越性,對兩種控制策略下的輸出直流電壓和電感電流紋波進(jìn)行對比分析。
取仿真時間段為0.2~0.25s的波形圖局部放大得到兩種控制策略下的輸出電壓和電感電流放大波形如圖7和圖8所示。
根據(jù)仿真波形圖可以看出,傳統(tǒng)雙閉環(huán)PI控制策略下的SWISS整流器輸出電壓和電感電流的紋波幅值較大,計算得到電壓和電流紋波因數(shù)約為0.044%和8.03%,且輸出電壓波形呈現(xiàn)振蕩狀態(tài),有不穩(wěn)定趨勢;自適應(yīng)反步控制策略的輸出電壓和電感電流紋波因數(shù)分別為0.002%和2.68%,且輸出電壓波形質(zhì)量更優(yōu),證明了所研究的自適應(yīng)反步控制策略能夠大幅地降低SWISS整流器的輸出電壓和電感電流紋波幅值,有效地改善輸出電壓電流波形質(zhì)量,具有較好的穩(wěn)態(tài)控制性能。
3.2? 動態(tài)特性對比分析
為了驗證所設(shè)計SWISS整流器的自適應(yīng)反步控制器在動態(tài)響應(yīng)性能方面的優(yōu)越性,對系統(tǒng)啟動時的工作響應(yīng)狀態(tài)、負(fù)載發(fā)生突變和輸出參考電壓變化三種運行工況進(jìn)行仿真分析,并將仿真結(jié)果與同樣工況下的傳統(tǒng)雙閉環(huán)PI控制策略結(jié)果進(jìn)行對比分析。
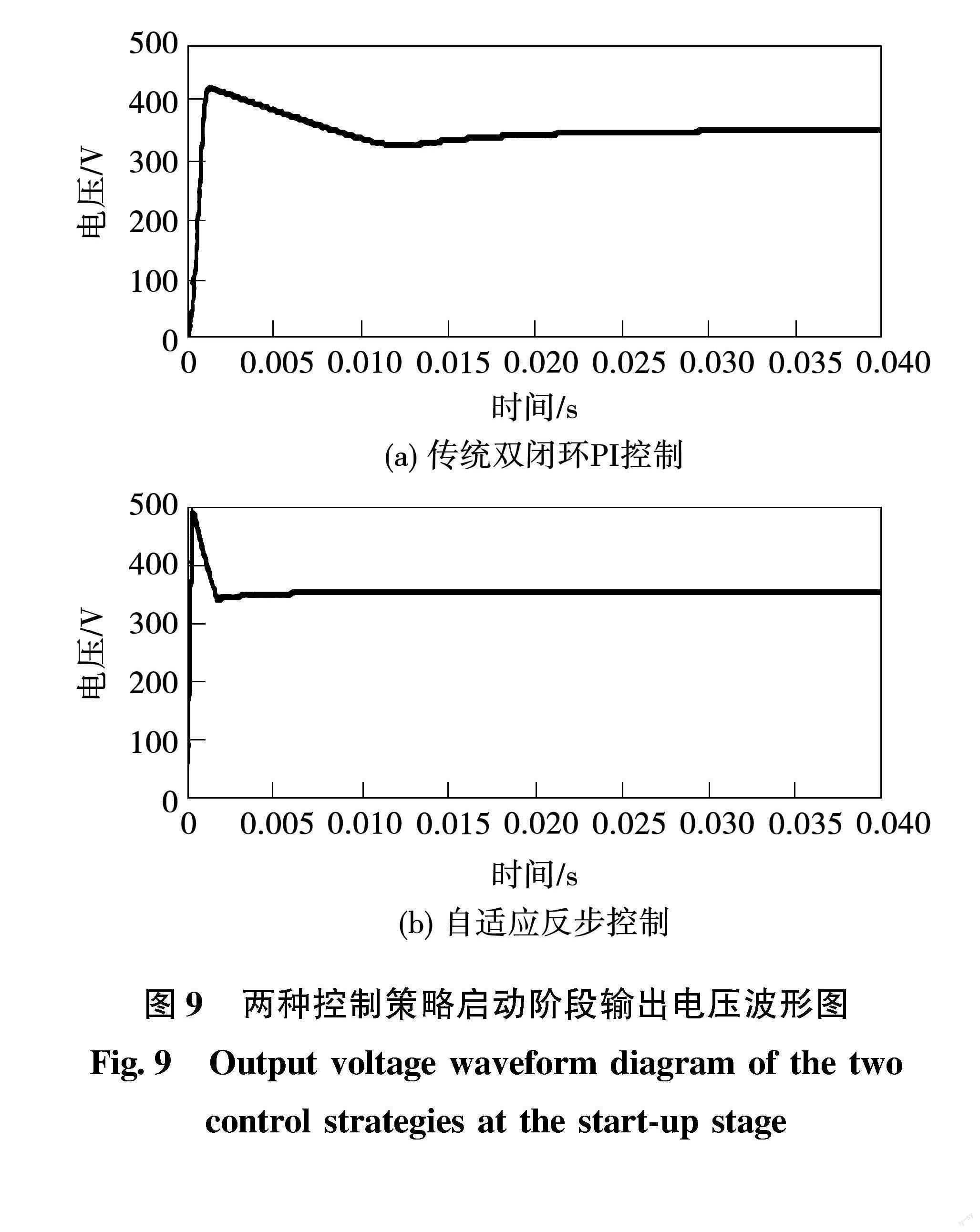
取仿真時間段為0~0.04s的SWISS整流器輸出直流電壓波形局部放大得到兩種控制策略下的啟動階段波形如圖9所示。根據(jù)仿真波形圖可以看出,在SWISS整流器的啟動階段,自適應(yīng)反步控制策略的輸出電壓能夠很快地收斂并且達(dá)到穩(wěn)定輸出值,相較于雙閉環(huán)PI控制策略調(diào)節(jié)時間縮短了0.023s,達(dá)到穩(wěn)態(tài)的調(diào)節(jié)時間短并且上升速度快。
設(shè)定仿真條件在0.05s時負(fù)載電阻突降,從81Ω變?yōu)?0.5Ω,得到兩種控制策略下SWISS整流器受到負(fù)載突減擾動時的輸出電壓波形如圖10所示。可以看出,傳統(tǒng)雙閉環(huán)PI控制下的SWISS整流器電壓超調(diào)量約為2.1V,需要約0.017s的調(diào)節(jié)時間重新達(dá)到穩(wěn)態(tài),而采用自適應(yīng)反步控制策略,能夠?qū)㈦妷撼{(diào)量降低到約0.7V,調(diào)節(jié)時間縮短到0.004s。
設(shè)定在0.15s將輸出電壓參考值從350V突變?yōu)?50V。圖11為兩種控制策略下SWISS整流器在參考電壓突變時的輸出電壓局部放大波形圖。可以看到自適應(yīng)反步控制策略下輸出電壓達(dá)到穩(wěn)定的調(diào)整時間約為0.0025s,而傳統(tǒng)PI控制下的調(diào)整時間約為0.007s;自適應(yīng)反步控制策略在參考電壓突變時的超調(diào)量相較于傳統(tǒng)PI控制也略微減小。
4? 半實物實驗驗證
為了進(jìn)一步驗證所設(shè)計SWISS整流器的自適應(yīng)反步控制器的可行性和有效性以及仿真分析結(jié)果的正確性,在如圖12所示的基于RT_BOX的半實物實驗平臺上對其進(jìn)行相對應(yīng)的實驗研究。
圖13為基于自適應(yīng)反步控制的SWISS整流器穩(wěn)態(tài)運行時的波形圖。其中Uo和IL為輸出450V直流電壓時的電壓和電感電流波形,ua和ia為輸入側(cè)A相的交流電壓電流波形。從實驗結(jié)果波形圖可以看到,輸入側(cè)A相電壓和電流基本保持同相位運行,即在單位功率因數(shù)運行的同時實現(xiàn)了輸出穩(wěn)定的直流電壓和電感電流。
圖14為SWISS整流器從啟動達(dá)到輸出350V電壓穩(wěn)態(tài)的電壓波形圖。從圖中可以看出,整流器在啟動時的沖擊電壓相較于穩(wěn)態(tài)時的350V電壓高出約136V,達(dá)到穩(wěn)態(tài)的時間約為5.7ms。
圖15為負(fù)載阻值從81Ω突減為40.5Ω時的實驗測試結(jié)果波形圖。可以看出當(dāng)輸出電壓350V,負(fù)載阻值突減為原來的一半時,達(dá)到再次穩(wěn)定的電壓超調(diào)量約為1V,調(diào)節(jié)時間約為4ms。
圖16為輸出直流參考電壓從350V突變到450V時,SWISS整流器的輸出電壓波形圖。可以看到,調(diào)節(jié)過程中的超調(diào)量約為20V,達(dá)到450V新穩(wěn)態(tài)的調(diào)節(jié)時間約為2ms。
將實驗測試結(jié)果與仿真結(jié)果在各種工況下的性能指標(biāo)對比發(fā)現(xiàn),實驗結(jié)果與仿真結(jié)果基本一致,證明了仿真分析的正確性,也進(jìn)一步驗證了所設(shè)計的自適應(yīng)反步控制器的可行性和有效性。
5? 結(jié)? 論
本文針對傳統(tǒng)雙閉環(huán)PI線性控制的抗擾動性能和動態(tài)特性較差的問題,以SWISS整流器等效電路模型的狀態(tài)方程為基礎(chǔ),設(shè)計了自適應(yīng)反步控制器。仿真對比分析和實驗測試結(jié)果表明,相較于雙閉環(huán)PI控制,所設(shè)計的自適應(yīng)反步控制器降低了輸出電壓和電感電流的紋波,縮短了啟動響應(yīng)時間,并且當(dāng)受到負(fù)載突變和參考電壓突變擾動時,減小了調(diào)節(jié)過程中的超調(diào)量和達(dá)到穩(wěn)態(tài)的調(diào)節(jié)時間,具有更優(yōu)的穩(wěn)態(tài)特性和動態(tài)響應(yīng)特性,驗證了所設(shè)計控制器的正確性和有效性。
參 考 文 獻(xiàn):
[1]? 胡合壯. 基于多相耦合電感的SWISS整流器研究[D].長沙: 湖南大學(xué), 2019.
[2]? 李湖勝. 用于電動汽車充電的SWISS整流器研究[D]. 長沙: 湖南大學(xué), 2017.
[3]? FRIEDLI T, HARTMANN M, KOLAR J W. The Essence of Three-Phase PFC Rectifier Systems-Part II[J]. IEEE Transactions on Power Electronics, 2014, 29(2): 1.
[4]? SOEIRO T B, FRIEDLI T, KOLAR J W. Three-phase High Power Factor Mains Interface Concepts for Electric Vehicle Battery Charging Systems[C]. Applied Power Electronics Conference and Exposition (APEC), IEEE, 2012: 2603.
[5]? SOEIRO T B, FRIEDLI T, KOLAR J W. Swiss Rectifier-A Novel Three-phase Buck-type PFC Topology for Electric Vehicle Battery Charging[C]. Applied Power Electronics Conference and Exposition (APEC), IEEE, 2012: 2617.
[6]? 賈強, 王棟, 亓迎川, 等. SWISS整流器的改進(jìn)型雙環(huán)控制系統(tǒng)設(shè)計[J]. 空軍預(yù)警學(xué)院學(xué)報, 2018, 32(2): 142.
JIA Qiang, WANG Dong, QI Yingchuan, et al. Design of Improved Double Loop Control System for Swiss Rectifier[J]. Journal of Air Force Early Warning Academy, 2018, 32(2): 142.
[7]? 張強. 降壓型三相功率因數(shù)校正電路與魯棒控制策略的研究[D].? 福州: 福州大學(xué), 2016.
[8]? 李森鐸. 基于預(yù)測控制的SWISS整流器研究[D]. 黑龍江: 哈爾濱理工大學(xué), 2020.
[9]? 李瑞松. SWISS整流器的非奇異終端滑模控制策略研究[D]. 哈爾濱: 哈爾濱理工大學(xué), 2021.
[10]JIA Q, QI Y, XIONG X, et al. Research and Implementation of SWISS Rectifier Based on Fuzzy PI Control[C]// International Conference on Mechanical, Control and Computer Engineering (ICMCCE), IEEE, 2018: 31.
[11]宋金秋, 段彬, 付程, 等. 電網(wǎng)不平衡工況下高頻鏈矩陣變換器非線性反步控制策略[J].中國電機工程學(xué)報, 2022, 685(2): 761.
SONG Jinqiu, DUAN Bin, FU Cheng, et al. Nonlinear Backstepping Control Strategy of High Frequency Link Matrix Converter under Unbalanced Power grid Conditions[J]. Chinese Journal of Electrical Engineering, 2022, 685(2): 761.
[12]顏景斌, 楊晨, 常龍龍, 等. 虛擬同步發(fā)電機慣量阻尼協(xié)同自適應(yīng)控制策略[J].哈爾濱理工大學(xué)學(xué)報,2019,24(6):58.
YAN Jingbin, YANG Chen, CHANG Longlong, et al. Cooperative Adaptive Control Strategy for Inertia Damping of Virtual Synchronous Generator[J]. Journal of Harbin University of Science and Technology, 2019, 24(6): 58.
[13]劉樂, 藺明浩, 李曉剛, 等. 基于模糊干擾觀測器的電液伺服位置系統(tǒng)自適應(yīng)反步控制[J]. 電機與控制學(xué)報, 2019, 182(12): 143.
LIU Le, LIN Minghao, LI Xiaogang, et al. Adaptive Backstepping Control of Electro-hydraulic Servo Position System Based on Fuzzy Disturbance Observer[J].Journal of Electrical Machinery and Control, 2019, 182(12): 143.
[14]顏景斌, 沈云森, 劉思, 等. SWISS整流器多目標(biāo)優(yōu)化[J]. 哈爾濱理工大學(xué)學(xué)報, 2021, 26(1):86.
YAN Jingbin, SHEN Yunsen, LIU Si, et al. Multi Objective Optimization of Swiss Rectifier[J]. Journal of Harbin University of Science and Technology, 2021, 26(1): 86.
[15]P Cortés, VANCU M F, KOLAR J W. Swiss Rectifier Output Voltage Control with Inner Loop Power Flow Programming (PFP)[C]// Control & Modeling for Power Electronics, IEEE, 2013: 1.
[16]周國華, 冷敏瑞, 李媛, 等.開關(guān)變換器及其控制環(huán)路的建模綜述[J]. 中國電機工程學(xué)報, 2020, 40(1): 183.
ZHOU Guohua, LENG Minrui, LI Yuan, et al. Overview of Modeling of Switching Converter and Its Control Loop[J]. Chinese Journal of Electrical Engineering, 2020, 40(1): 183.
(編輯:溫澤宇)
