UWB定位應用綜述
2023-03-16 10:24:54貴州健康職業學院郭永強于喜志黃曉芬田太權楊俊
數字技術與應用 2023年2期
貴州健康職業學院 郭永強 于喜志 黃曉芬 田太權 楊俊
本文根據UWB通信基礎介紹了常規TOA、TDOA、AOA等算法的理論基礎以及定位原理和方法,以及算法的優勢和不足;同時介紹了影響算法的視距和非視距鑒別問題和影響因素。根據研究文獻資料介紹了幾種鑒別視距和非視距問題的模型,同時闡述了非視距模型的測量指標,而后對于定位的擴展應用的三維定位問題進行研究介紹,最后對UWB應用進行了闡述。
隨著家居智能化以及自動化智慧工廠的建立,室內定位精確度要求提高。為滿足定位精度室內定位的研究,主要著手點在利用Wi-Fi、ZigBee、Bluetooth、RFID等來實現室內無線定位;隨著超帶寬(Ultra-wideband, UWB)無線載波技術的發展,UWB定位的研究方法增多。UWB在2002年應用于民用規范[1],其應用頻率寬,相對帶寬較大,發射功率低于1mW[2]。同時定位精度高,抗干擾能力及穿透能力強,能耗低而受到關注[3]。
UWB[4]的應用源于Scholtz的脈沖調制的論文[5],UWB具有抗多徑和時間分辨敏感的特性[6]。因兼具定位和信息傳遞功能應用得以擴展[7]。應用的研究主要集中在解決多徑和非視距問題,Lee等[8]提出的基于直射路徑的信號首次接收時間確定問題,依據UWB信號的特點反映出在視距情況下直射路徑的信號強度最強,該方法易于接受和理解,得到了推廣應用。Cassioli等[9]研究關于復雜環境下的非視距問題支出在非視距環境下直徑距離測量值不再是最強路徑,這增大了直徑測量的難度。因Guvenc等[10]提出此針對非視距環境下的路徑問題需要特殊的加以甄別。
1 UWB超帶寬算法簡述
超帶寬定位算法在獲取信息時主要是根據時間信號來確定,依據時間和信號角度等可以劃分為:接收到標簽信息的時間(Time of Arrival,TOA)、接收到信息的時間差(Time Difference of Arrival,TDOA)、信號的往返時間(Time of Flight,TOF)以及接收到信號的角度(Direction of Arrival,DOA)或(Angle of Arrival,AOA)等[11,12]。
(1)TOA算法:TOA算法是利用基站接收到標簽的信息時間進行計算[13]。該算法在應用時至少需要3個基站協同工作,同時也要保證標簽和各基站之間的時間同步。
在進行距離測量時,依據算法公式(1)和公式(2)求解得出標簽的坐標位置(x,y):
其中基站設備坐標分別為(xi,yi),被測量標簽的坐標為(x,y)。R為標簽到基站的距離半徑。
從算法的測量參量分析可知該算法的定位精度嚴格依賴于距離R,與此同時標簽和各個基站之間的時間保持高度同步,而面對不同的環境和硬件設備有不同的影響程度;同時也有時間建立方程固有的非線性問題[14]。
(2)TDOA算法:TDOA算法是以標簽信號到達基站的時間差來進行計算,該算法相比TOA主要在于標簽不必與各基站保持時間的同步,各個基站時間必須是保持同步。標簽到達主基站和參考基站兩基站的時間差為Δt,標簽到達兩基站的距離差D=Δt×C為定值。基站坐標為(xi,yi);設標簽節點的坐標為(x,y);D為標簽到基站的距離。建立方程組如式(3)所示:
由此可以解算出標簽坐標,同樣該算法的測量精度依賴于基站之間的時間同步,要保證測量數據的精確度就要保證基站間時間的同步問題。
(3)TOF定位算法:TOF(Time of Flight)定位算法即計算信號從標簽到基站之間的往返時間的計算方法,該方法是一種測距的方法需要結合其他模型方法(例如三邊定位算法)來進行輔助計算。該算法特點在于對于基站和標簽之間的時間同步問題未作要求。基站經過Ttat的時間處理信息,定位標簽從發送信號到接收到應答信號經歷了Ttot的時間,那么定位信號往返定位標簽和基站之間的時間為T=(Ttot-Ttat)/2,則標簽和基站之間的距離D=C×T(C為電磁波在空氣中的傳播速度)。該方法的測量精度也依賴于時間測量的精度[15,16],由于基站和標簽之間不必嚴格時間同步,因此算法的應用進一步擴展。
(4)AOA定位算法:AOA(Angle of Arrival)算法是信號到達角度進行定位算法,算法是利用基站的天線陣列或者明確方向的天線來進行測量標簽信號到達基站的角度和距離信息,求解幾何信息來計算標簽的位置坐標,角度θ1,θ2為標簽信號到達基站的角度,設基站坐標為(xi,yi);標簽的坐標為(x,y)。根據幾何關系可得如式(4)所示:
即可求得標簽的位置坐標(x,y)。由于涉及到角度和時間的兩種數據的測量,所以信號也容易受到環境因素(例如環境復雜度和非視距因素)的干擾[17],因此在測量時需要高精度的天線陣列或者方向天線。
綜上所述UWB定位中算法的基本原理和方法,目前研究資料可知,在實際應用中受復雜環境因素的影響、硬件設備性能限制、算法本身局限性等因素,僅憑單一的算法無法實現精確定位。因此研究者們想通過一種或多種基本模型算法的優勢互補來進行嘗試以提高精度,減小干擾因素的影響。依據時間的依賴性分析是否要求嚴格同步總結如表1所示。
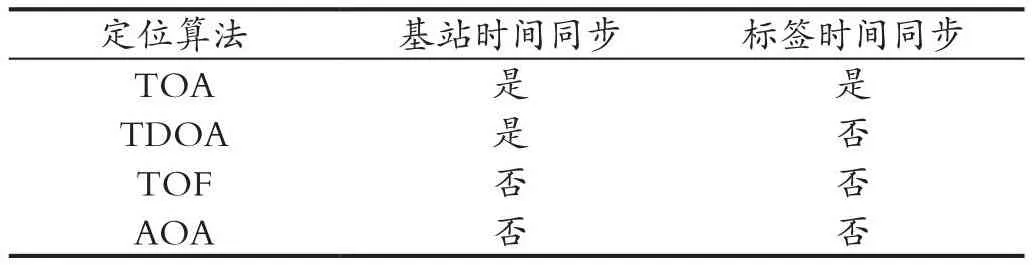
表1 時間同步關系Tab.1 Time synchronization relationship
閆雷兵等[18]提出了結合TDOA和AOA算法的定位研究,該方法主要針對當測量到的距離到個基站相等或近似的情況下的計算求解問題,由于測量距離相等或相近在求解時利用兩步加權最小二乘算法和約束加權最小二乘算法會出現測量矩陣的奇異性,解決了圓形陣列中的移動標簽定位時出現測量矩陣的奇異性問題。提出利用約束加權最小二乘法的基礎上加以分離變量進行避免求解困難的問題,同時本身的價值函數的重構也表現出特殊的重要性。該方法不僅優化了TDOA和AOA的測量數據,也可優化引入的附加變量中的定位數據。高健等[19]采用三次通信的TDOA和TOF結合的方法有效地提高了測量精度弱化測量時雙曲線抖動的問題。張怡等[20]利用兩次卡爾曼濾波進行非視距情況下的TDOA/AOA的混合定位研究。利用類正態分布在最小二乘法下的擬合建立TDOA的誤差模型處理非視距的問題,而后利用卡爾曼濾波方法對混合定位。同時對比了利用TDOA算法和靜態下泰勒級數展開下的TDOA和TDOA/AOA的預算結果,表現出一定的優勢[21]。
UWB測量算法模型:以上定位算法的測量過程中涉及時間和路徑的問題,主要是基于能量或者是信號的多徑和非視距問題。信號的監測有基于信號強度(Signal Strength Indicator,RSSI)的測量和利用UWB時間分辨率的TOA/TDOA等兩種類型。
RSSI是基于能量信號傳播衰減模型的測量模型,本質上是距離的定位方法[22]RSSI模型的設計定位時要求距離滿足條件,如式(5)所示:
其中節點距離d,路徑損耗np,σsh零均值高斯隨機變量標準差,對數表示正態的衰落,該模型適用于參考基站和目標比較接近的環境下,因受實際應用環境的限制,算法的魯棒性不強,具體體現在式中的距離關系。
TOA/TDOA的UWB時分辨的信號測量在視距和非視距環境下遵從電磁波信號的直達和多徑問題。多徑信號是電磁波信號在傳輸路徑上經過周圍物體的反射或者散射形成的信號疊加現象。在視距情況下直達DP成分容易監測,復雜環境下的DP信號難以檢測,進而引起非視距環境下的非視距(NLOS)檢測的誤差。如式(6)所示為常規TOA信號檢測模型。
其中C為光速,PRN、PUN為節點位,||PRN-PUN||表示節點間距離,ηMP徑誤差,eNLOS為非視距誤差。
建模應用過程中對誤差有不同的模型建立,在UWB信號的接收過程中多徑的影響造成DP成分的延遲或者誤檢。該模型建立的多徑誤差模型ηMP為高斯模型,如式(7)所示:
μMP、σMP為ηMP的均值和標準差,ηMP有正負偏差,假設μMP→0,引入參數λd對數距離,改寫ηMP如式(8)、式(9)所示:
而實際環境中UWB信號在復雜環境中的傳播有不同的特性,信號的傳播路徑是非視距的,DP衰減很快,造成接收信號的延時,對于NLOS環境下的信號測量引起NLOS誤差。其誤差模型選用指數模型較為理想,如式(10)所示:
其中μNLOS為指數分布均值,則ηMP的改寫描述定位誤差如式(11)所示:
其中w為權重因子。
從現有文獻資料分析在不同模型中建模誤差,模型有所不同,非視距的延時檢測,誤差通常表現為正誤差,符合高斯分布的特征,表現為正均值。根據以上的分析可知非視距的情況下會引起TOA估計的誤差,在實際的應用環境中找到適當的方法鑒別視距和非視距就顯得尤為重要。
2 視距鑒別方法
在NLOS環境下的TOA誤差較大,鑒別非視距用于修正誤差提高精度是很重要的,在移動互聯網中鑒別時NLOS常用來以二元假設來進行判斷。在UWB的應用過程中通過分析信噪比來鑒別視距和非視距的情況,分析TOA的誤差也是同樣可以做到的。那么在視距環境下的直接路徑和最強路徑是統一的,定義直接路徑的幅度值。在視距環境下的直達路徑和最強路徑相同歸一化其值[10]為如公式(12)所示:
在非視距環境下直達路徑有時不表現為最強路徑或者最強路徑測量指標不明顯。在視距和非視距環境下的幅度值不同,肖竹等[23]的仿真實驗結果也表明了該研究的觀點,說明多徑分量的幅度值可以用來鑒別視距和非視距的情況。
2.1 最強路徑模型
在視距和非視距的情況下,直達路徑能量和多徑信道能量分布的不同,可以依據能量分布情況進行視距和非視距的鑒別,定義最強路徑的能量與信道能量值的比值如式(14)所示:
其中ξ是最強路徑的歸一化值,λSP與ξ的大小關系表明是視距或者非視距的情況。視距情況下的直達路徑和最強路徑相同,表現為主要能量集中,在非視距情況下主要路徑能量不集中,表現不明顯的最強路徑,而區分的界限值歸一化值也是影響判斷的重要因素。
2.2 峭度
峭度反映的是隨機變量分布的數值統計特征,是數據集合歸一化的四階中心矩,反應數據的峰度值大小狀況,四階距表示峰度,二階矩表示方差,陡峭度實際上反映的是數據的集中凹凸的程度,如果數據越是集中K值就越突出,表明其有更突出的峰值。那么在UWB通信的過程中依據其特性,如果K值越大則表示其為視距的概率就越大,K值越小表示為在非視距環境下的概率就越大。對于特定的信道峰度κ如式(15)所示:
其中μ|h|、σ|h|是|h(t)|的均值和標準差,h(t)是信道,κ的表現能夠體現在LOS/NLOS的信道特征,通過建立正態分布模型檢測κ值有不同的置信度值[24],如式(16)所示。
其中μκ、σκ是κ的均值和標準差。
表明無論是在實驗室還是在實際環境下,在視距環境下的K值都明顯大于非視距下的值κ。
2.3 延時測量指標
依據上文的分析,從能量的角度出發顯示并未體現UWB的時間分辨特性,從平均超量延時(MED,Mean Excess Delay)和均方根延時擴展(RMS Delay Spread)表現了多徑分量的時間分辨特性。通常情況下的MED和RMS在NLOS環境下和LOS環境下有著明顯的區別,兩個測量指標可表示為如式(17)所示:
其中τMED,τRMS也符合對數正態分布,在相同的環境下不同的τMED,τRMS值用于鑒別視距和非視距。結合通信標準數據分析[24]實驗數據表明這點。
結合以上分析:在LOS環境下的能量SP最大可以認定為DP。在延時測量指標方面依據UWB的傳播特性,非視距環境下的MEN和RMS比視距下的限量要大,符合信號最強路徑直接傳播時間最快,反射和散射接收到的信號必定帶有延時特性,并且依據延時量和均方根有直接的反應。陡峭度的概念更契合與四階距的峰度定義,也符合正態分布中的越是集中概率越大的概念。
3 數據融合UWB定位算法
定位環境的復雜性逐漸應用于三維的定位中。單一的UWB定位表現出了一定的局限性。因此逐漸將傳統的定位數據與UWB相結合,實現硬件設備的互聯復用,同時加強了數據融合的研究。
三維UWB室內定位中孫建強等[25]使用氣壓計輔助UWB進行室內定位方法的定位精度可以控制。定位方法應用三邊定位法,利用三個基站一個移動標簽;測距運用雙邊雙向時間差,基站和移動標簽無需時間同步,減少了時間不同步造成的誤差。但是要實現三維測量在每個樓層之間還是需要三個基站。該方法特點在于實現3D定位的方法,三維依賴的是氣壓計來處理三維問題,給處理三維問題帶來了一個新的思路,是具體到每個層次的定位依然依靠的是三點定位,同時在基站的應用方面實現準確的定位也避免不了多基站的應用問題,也未考慮在應用過程中信號衰減和非視距鑒別等數據問題。
李世銀等[26]基于SAE-RF的三維UWB室內定位方法研究運用指紋定位算法進行3D定位,具體定位方法為以UWB的測距作為指紋采集方式,利用稀疏自編碼器(SAE)提取指紋的相關特征,而后利用隨機森林(RF)進行誤差修正,特別是在構建SAE-RF時為了避免SAE在低維度數據輸入時隱含層神經單元過多導致的精度下降問題引入了對隱含層數據單元的稀疏性限制。對于多余的數據進行Dropout方法[27]處理。該算法的特點在于運用系數矩陣和RF回歸模型修正誤差數據,高度精確的準確性來源于指紋定位數據的建立和指紋匹配,所以只是利用了UWB作為指紋數據的采集,沒有利用UWB信號的信息多樣性,數據處理方面的非視距和多徑問題未做說明性的研究。
張寶軍等[28]基于DL-LSTM的UWB /INS室內定位算法的研究中利用慣性導航和UWB結合的方法進行定位研究。鑒于長短期記憶神經網絡[29-31](LSTM)根據設置不同的振幅和相位數據可以學習到更加深層次的特征而提高預測定位的精度。雙層LSTM模型可以抑制UWB定位中的非視距誤差[32]。該方法運用的慣性導航結合UWB的算法,用比較常規的技術手段解決UWB的非視距誤差修正,為處理過程的歸一化提出了較大誤差,從數據表示來看仿真效果較為理想。在處理室慣性導航數據的誤差積累和隨時間的漂移問題[33]未得到嚴格的控制,進而影響到慣性導航數據的準確性,而在數據融合層,主要依據的還是距離的測量值,鑒于最小二乘法數據標定模型本身的線性問題,其數據值選取和前期處理如何得以保障可靠性需要深入處理才能夠得以應用,確保數據模型的準確性。
基于通信技術的無線傳感網絡技術[34]轉而對其帶寬特性的定位研究,研究對象多在于NLOS的誤差處理;盛坤鵬等[35]非視距誤差改正的超寬帶定位模型研究。曾玲等[36]研究表明非視距對移動標簽的影響問題有助于解決室內移動定位的研究。閆雷兵等[20]研究了移動標簽位于矩陣中心時的求解奇異矩陣的情況。基于以上分析,重點的研究目前還是在尋找合理的數據處理方法來解決非視距現象帶來的干擾問題,總體思路還是鑒別估計運算和多徑問題。
4 結論
本文介紹了UWB通信的理論基礎和方法,分析了TOA、TDOA、TOF和AOA的基本算法,以及兩者或者多種定位基礎算法相結合的定位原理和定位方法,介紹其影響的主要因素。闡明了TOA、TDOA的嚴格要求基站時間同步的問題,以及雙向時間監測TOF及算法的進一步擴展和標簽與基站的時間同步。在模型確定時分析RSSI模型,陡峭度模型,超量延時的數據信號的分析問題,鑒別視距和非視距的信息處理,重點在非視距的鑒別和數據運用,同時介紹了多數據融合的定位應用。基于氣壓計的三維UWB定位擴展應用,利用氣壓計減少三維定位中的多基站的問題,減少了相對成本,但是具體定位時的非視距問題和信號損耗,基站時間同步等數據問題未做詳細的處理;以及記憶神經網絡的問題,對非視距做闡述運用慣性導航修正數據解決誤差問題,慣性導航的本身數據的誤差積累和漂移問題值得注意;以及數據標定的最小二乘法本身模型的線性關系在實際應用中并不適用。指紋定位的方法,將前言經驗方法運用到UWB的過程中利用稀疏編碼建立指紋庫,同時考慮到非視距環境的非線性關系進行回歸修正,表明效果較好,但是指紋庫的模型建立以及UWB信號的采集需要更加關注,能夠運用到準確的測距信息。UWB定位技術已經應用到室內定位、空天相機位置追蹤[37]、無線網絡通信應用、感知物體信息[38]、醫療成像研究[39]、深井和惡劣環境便攜設備等現實應用領域[40,41]。因其具有良好的通信特帶寬,時分辨特性,結合硬件輔助設備實現便捷低功耗,同時降低應用成本問題,表明今后的實際前景更加廣泛。
引用
[1]趙亮,劉雙平,金梁,等.超寬帶系統的功率譜密度限制問題研究[J].電信科學,2011,27(2):34-39.
[2]王一強,孫罡,侯祥博.UWB 超寬帶技術研究及應用[J].通信技術,2009,42(3):70-72+75.
[3]許波,賀鵬飛,段嗣妍.無線體域網信道特性研究[J].電信科學,2011,27(3):78-84.
[4]WIN M Z.SCHOLTZ R A.Hnpulse Radio:How it Works[J].IEE Commun Lett,1998,2(2):36-38.
[5]SCHOLTZ R.Multiple Access with Time-hopping Impulse Modulation[C]// Military Communications Conference.IEEE,1993.
[6]ROY S,FOERSTER J R,SOMAYAZULU V S,et al.Ultrawideband Radio Design:the Promise of High-speed,Shortrange Wireless Connectivity[J].Proceedings of the IEEE,2004,92(2):295-311.
[7]PATWARI N,ASH J N,KYPEROUNTAS S,et al.Locating the Nodes:Cooperative Localization in Wireless Sensor Networks[J].IEEE Signal Processing Magazine,2005,22(4):54-69.
[8]LEE J Y,SCHOLTA R A.Ranging in a Dense Multipath Environment Using an UWB Radio Link[J].Proc.ieee J.sel.areas Commun,2002,20(9):1677-1683.
[9]CASSIOLI D,WIN M Z,VATALARO F,et al.Low Complexity Rake Receivers in Ultra-Wideband Channels[J].IEEE Transactions on Wireless Communications,2007,6(4):1265-1275.
[10]GUVENC I,CHONG C C,WATANABE F.NLOS Identification and Mitigation for UWB Location Systems[C]//IEEE Wireless Communications &Networking Conference.IEEE,2007.
[11]ZHAO G,NIU H.Research and Application of Indoor Positioning Based on UWB[C]//Third International Conference on Cyberspace Technology (CCT 2015).IET,2015.
[12]李曉龍.基于UWB的移動定位算法研究[D].呼和浩特:內蒙古大學,2016.
[13]HONG J M,KIM S H,LEE J G,et al.Indoor Position Monitoring System Using UWB Module[A].Advanced Science and Industry Research Center.Proceedings of 2018 3rd International Conference on Control,Automation and Artificial Intelligence (CAAI 2018)[C]//Advanced Science and Industry Research Center:Science and Engineering Research Center,2018:3.
[14]朱國輝,馮大政,向平葉,等.傳感器誤差情況下的線性校正TOA定位算法[J].系統工程與電子技術,2015,37(3):498-502.
[15]游小榮,裴浩,霍振龍.一種基于UWB的三邊定位改進算法[J].工礦自動化,2019,45(11):19-23.
[16]王錦濤,皇甫一鳴,李哲舟,等.基于 UWB 測距技術的室內定位研究[J].通信電源技術,2018,35(5):50-53+56.
[17]馬婧.基于UWB信號的單基站定位算法研究及AOA定位研究[D].青島:中國海洋大學,2013.
[18]閆雷兵,陸音,張業榮.基于改進最小二乘算法的TDOA/AOA定位方法[J].電波科學學報,2016,31(2):394-400.
[19]高健,陸陽,李慶巧,等.采用三次通信的TOF與TDOA聯合定位算法[J].電子測量與儀器學報,2020,34(3):66-73.
[20]張怡,席彥彪,李剛偉,等.基于卡爾曼濾波的TDOA/AOA混合定位算法[J].計算機工程與應用,2015,51(20):62-66.
[21]孔維炯,丁志中,方福柱.基于TDOA的高精度無線定位算法分析與實現[J].合肥工業大學學報(自然科學版),2019,42(6):756-762.
[22]劉洋,楊樂,郭福成,等.基于定位誤差修正的運動目標TDOA/FDOA無源定位方法[J].航空學報,2015,36(5):1617-1626.
[23]肖竹,黑永強,于全,等.脈沖超寬帶定位技術綜述[J].中國科學(信息科學),2009(10):1112-1124.
[24]GUVENC I,CHONG C C,WATANABE S,et al.NLOSIdentification and Weighted Least-Squares Localization for UWB Systems Using Multipath Channel Statistics[J].EURASIP Journal on Advances in Signal Processing,2008(6):1-14.
[25]孫建強,尚俊娜,劉新華,等.氣壓計輔助的UWB室內定位方法[J].傳感器與微系統,2021,40(6):30-33.
[26]李世銀,朱媛,劉江,等.基于SAE-RF的三維UWB室內定位方法研究[J].傳感器與微系統,2021,40(8):46-49.
[27]SRIVASTAVA N,HINTON G,KRIZHEVSKY A,et al.Dropout:A Simple Way to Prevent Neural Networks from Overfitting[J]Journal of Machine Learning Research,2014,15(1):1929-1958.
[28]張寶軍,陳曦,廖延娜,等.基于DL-LSTM的UWB/INS室內定位算法[J].傳感器與微系統,2021,40(10):147-150.
[29]姚順宇,王志武,顏國正.雙層雙向長短期記憶應用于云軌精確定位[J].光學精密工程,2020,28(1):166-173.
[30]李明曉,張恒才,仇培元,等.一種基于模糊長短期神經網絡的移動對象軌跡預測算法[J].測繪學報,2018,47(12):1660-1669.
[31]段曉磊,劉翔,陳強,等.基于粒子濾波與LSTM網絡對未標記AGV的追蹤方法[J].傳感器與微系統,2020,39(2):37-39.
[32]鮑小雨,王慶,陽媛,等.一種抑制NLOS誤差的UWB定位方法[J].傳感器與微系統,2019,38(9):9-12.
[33]李賀龍,于海波,何嬌蘭,等.基于數據融合方法的智能表運行剩余壽命[J].電測與儀表,2019,56(18):126-133.
[34]GEZICI S,TIAN Z,GIANNKIS G B,et al.Location Via Ultrawideband Radios-a look at Positioning Aspect of Future Sensor Network[J].IEEE Signal Process Mag,2005,22(2):70-84.
[35]盛坤鵬,王堅,李晨輝,等.非視距誤差改正的超寬帶定位模型研究[J].測繪科學,2021,46(3):40-47.
[36]曾玲,彭程,劉垣.基于非視距鑒別的超帶寬室內定位算法[J].計算機應用,2018,38(S1):131-134+139.
[37]NI J,ARNDT D,NGO P,et al.UWB Tracking System Design for Free-flyers[J].In:Proceeding of Space 2004 Conference and Exhibit AIAA.San Diego,2004:1-9.
[38]HUSSAIN M G M.Ultra-wideband Impluse Radar-an Overview of the Principles[J].IEEE Aerosp Electron Syst Mag,1988,13(9):9-14.
[39]CHEN Y F,GUNUWAN E,KIM Y,et al.UWB Microwave Imaging for Breast Cancer Detection:Tumor/Clutter Identification Using a Time of Arrival Data Fusion Method[C]//IEEE Antennas&Propagation Society International Symposium.IEEE,2006:255-258.
[40]陳新科,喻川,文智力.UWB定位技術在煤礦井下的應用[J].煤炭科學技術,2018,46(S1):187-189.
[41]高思琪,孫建平.UWB定位技術的應用研究[J].儀器儀表用戶,2019,26(3):77-82.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
光學精密工程(2016年6期)2016-11-07 09:07:19
