信標(biāo)數(shù)量不固定的聲學(xué)定位組合導(dǎo)航方法及仿真
2023-03-16 10:24:52海軍潛艇學(xué)院航海觀通系高大遠(yuǎn)
數(shù)字技術(shù)與應(yīng)用 2023年2期
海軍潛艇學(xué)院航海觀通系 高大遠(yuǎn)
中圖分類(lèi)號(hào):TN967.2文獻(xiàn)標(biāo)識(shí)碼:A文章編號(hào):1007-9416(2023)02-0008-04
DOI:10.19695/j.cnki.cn12-1369.2023.02.02
收稿日期:2022-11-01
作者簡(jiǎn)介:高大遠(yuǎn)(1978—),男,甘肅民勤人,工學(xué)博士,副教授,研究方向:水下導(dǎo)航與組合導(dǎo)航。
針對(duì)水下航行器利用聲學(xué)定位時(shí)可能出現(xiàn)無(wú)法收到足夠數(shù)量信標(biāo)測(cè)距信息的問(wèn)題,提出一種基于單聲信標(biāo)測(cè)距和推算定位的組合導(dǎo)航方法。以航行器航速、航向信息為輸入,位置為狀態(tài),信標(biāo)測(cè)距信息為輸出,建立組合導(dǎo)航濾波模型,采用擴(kuò)展卡爾曼濾波器進(jìn)行組合導(dǎo)航信息濾波。通過(guò)仿真對(duì)本方法應(yīng)用特性進(jìn)行驗(yàn)證分析。研究表明,本方法可以有效應(yīng)對(duì)信標(biāo)數(shù)量較少或航行器有效接收信標(biāo)應(yīng)答信號(hào)數(shù)量不固定的情況,具有良好的水下定位效果。
水下平臺(tái)航行或工作常采用水聲定位方法獲取位置信息。由于水聲定位方法其具有可控性好、精度高等特點(diǎn),在海洋工程和科學(xué)考察活動(dòng)中得到廣泛應(yīng)用,目前已有較多貨架產(chǎn)品。其中長(zhǎng)基線定位系統(tǒng)(Long Base Location, LBL)具有定位范圍大、精度高的特點(diǎn)[1,2]。LBL定位原理與衛(wèi)星定位原理類(lèi)似,在海底布設(shè)至少3個(gè)聲信標(biāo)(一般4-6個(gè)),精確測(cè)量其位置作為空間基準(zhǔn)。在定位時(shí),航行器安裝的聲學(xué)問(wèn)答機(jī)發(fā)射信號(hào),海底聲信標(biāo)發(fā)射應(yīng)答信號(hào),航行器根據(jù)信號(hào)往返的延時(shí),算出距離信息,根據(jù)航行器到多個(gè)聲信標(biāo)的距離,即可解算其位置,實(shí)現(xiàn)導(dǎo)航定位。
但由于海底環(huán)境的制約,有時(shí)難以布設(shè)足夠數(shù)量的信標(biāo);海洋環(huán)境的復(fù)雜性使得水下航行器也難以接收到所有信標(biāo)的應(yīng)答信號(hào)。在實(shí)際定位時(shí),航行器與各信標(biāo)距離不同,也無(wú)法同時(shí)接收到所有應(yīng)答信號(hào),考慮到航行器的動(dòng)態(tài)航行特性,此時(shí)利用應(yīng)答信號(hào)進(jìn)行解算帶來(lái)定位誤差。
針對(duì)上述情況,需要一種利用較少數(shù)量信標(biāo)的水聲定位方法,同時(shí)此方法還應(yīng)能適應(yīng)多個(gè)信標(biāo)以及信標(biāo)應(yīng)答信號(hào)不同時(shí)到達(dá)的情況。
對(duì)于此類(lèi)問(wèn)題,已有利用較少數(shù)量聲信標(biāo)(1或2個(gè))進(jìn)行定位方法的研究[3,4],基本思想是航行器通過(guò)在聲信標(biāo)周?chē)叫校@取航跡上多個(gè)點(diǎn)上聲信標(biāo)的距離,利用幾何方法解算航跡相對(duì)聲信標(biāo)的相對(duì)關(guān)系,從而計(jì)算航行器位置。這一方法,類(lèi)似匹配定位,是一種非實(shí)時(shí)的方法,對(duì)航跡約束較多,目前并未廣泛使用。
本文研究一種利用航行器推算定位信息與單聲信標(biāo)測(cè)距信息的組合導(dǎo)航定位方法。采用此方法,航行器在只接收到一個(gè)聲信標(biāo)應(yīng)答信號(hào)的情況下仍然可以進(jìn)行定位,在多個(gè)信標(biāo)組成的聲學(xué)定位基陣內(nèi),可以根據(jù)所接接收的應(yīng)答信號(hào)分別進(jìn)行定位計(jì)算,不再要求接收到所有信號(hào)后才進(jìn)行定位計(jì)算,放松了對(duì)聲信標(biāo)數(shù)量的要求。這一方法對(duì)工程應(yīng)用具有一定的實(shí)用價(jià)值。
1 單信標(biāo)測(cè)距/推算定位組合導(dǎo)航建模
一般水聲定位方法利用航行器到多個(gè)信標(biāo)的測(cè)距信息,通過(guò)幾何解算計(jì)算航行器位置。當(dāng)信標(biāo)數(shù)量較少、測(cè)距信息存在誤差時(shí),位置解算無(wú)法進(jìn)行或存在較大誤差。考慮到水下航行器一般帶有羅經(jīng)和計(jì)程儀等測(cè)向、測(cè)速設(shè)備,可進(jìn)行推算定位,因此通過(guò)建模可將二者結(jié)合實(shí)現(xiàn)定位。
1.1 推算定位模型
航行器水下航行,深度固定且已知,測(cè)量航速V和航向C,則可建立一般推算定位模型如式(1)、式(2)所示:
其中,λ、φ為航行器經(jīng)緯度,R為地球半徑,vN,vE分別為載體的北向速度和東向速度,如式(3)所示:
水聲定位時(shí),問(wèn)答/應(yīng)答信號(hào)作用距離一般不超過(guò)十幾公里,在此局部范圍內(nèi),可以建立平面直角坐標(biāo)系,航向定義為航行器與坐標(biāo)系y軸之間的夾角,則模型轉(zhuǎn)化如式(4)、式(5)所示::
在考慮航速和航向測(cè)量誤差,并對(duì)方程離散化后,可得推算定位方程如下:
其中,ωv和ωc表示航行器速度和航向測(cè)量過(guò)程中的測(cè)量誤差,狀態(tài)(xk+1,yk+1)表示航行器當(dāng)前在直角坐標(biāo)系中的位置,(xk,yk)表示上一時(shí)刻航行器位置,ΔT為推算時(shí)間步長(zhǎng)。由于航速和航向誤差的存在,推算定位的誤差不斷增大,需要利用水聲定位信息校正。
1.2 水聲測(cè)距與定位模型
以4個(gè)信標(biāo)的水聲定位為例,仍然考慮平面直角坐標(biāo)系。假設(shè)海底信標(biāo)的位置坐標(biāo)為(xbk,ybk,zbk),k=1,2,3,4,航行器的位置坐標(biāo)為(x,y,z),測(cè)量得到的航行器到信標(biāo)距離為L(zhǎng)k,則可建立距離方程如式(8)所示:
進(jìn)行水聲定位時(shí),利用多個(gè)信標(biāo)的測(cè)距信息,即可計(jì)算航行器位置[2],進(jìn)而對(duì)推算定位信息進(jìn)行校正。
當(dāng)聲學(xué)定位系統(tǒng)信標(biāo)數(shù)量較多時(shí),公式(8)中的方程數(shù)量增多,可充分利用冗余信息,得到精度較高的定位解;但當(dāng)可測(cè)距信標(biāo)數(shù)量較少時(shí),方程的個(gè)數(shù)少于待求變量個(gè)數(shù),則無(wú)法計(jì)算得到定位信息。此時(shí)需將推算定位模型公式(6)和公式(7)與水聲測(cè)距模型公式(8)結(jié)合,利用卡爾曼濾波等方法進(jìn)行組合導(dǎo)航對(duì)位置進(jìn)行最優(yōu)估計(jì)。
2 單信標(biāo)測(cè)距/推算定位組合導(dǎo)航濾波方法
如圖1所示,航行器利用航速、航向信息對(duì)位置進(jìn)行推算,由于存在測(cè)量誤差(常值誤差和隨機(jī)干擾),其定位誤差隨時(shí)間累積而不斷增加,導(dǎo)致位置信息不可信。當(dāng)其接近信標(biāo),能夠測(cè)得信標(biāo)的距離時(shí),若只能接收一個(gè)或較少數(shù)量的信標(biāo)信息,則無(wú)法單獨(dú)完成定位計(jì)算。此時(shí),考慮推算定位已經(jīng)給出了部分位置信息,將其充分利用,則可實(shí)現(xiàn)利用單信標(biāo)測(cè)距信息進(jìn)行定位。
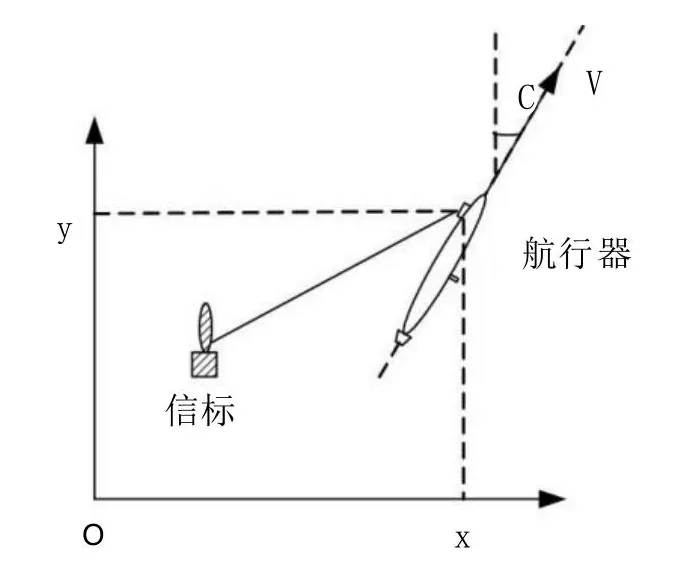
圖1 單信標(biāo)測(cè)距/推算定位組合導(dǎo)航示意圖Fig.1 Combined navigation method based on single beacon/dead reckon
將公式(6)、公式(7)、公式(8)進(jìn)行結(jié)合,構(gòu)成組合導(dǎo)航模型,利用擴(kuò)展卡爾曼濾波方法可實(shí)現(xiàn)組合導(dǎo)航定位,方法如下。
首先將模型進(jìn)行重寫(xiě),對(duì)某一時(shí)刻k,令狀態(tài)和輸入如式(9)所示:
輸出如式(10)所示:
其中(xb,yb,zb)是單信標(biāo)的位置坐標(biāo)。
則過(guò)程模型如式(11)、式(12)所示:
對(duì)于式(11)、式(12)來(lái)說(shuō),需在實(shí)際航跡附近線性化,計(jì)算雅可比(Jacob)矩陣。
對(duì)于輸入,雅可比矩陣計(jì)算公式如式(13)所示:
對(duì)于測(cè)量方程,其雅可比矩陣可寫(xiě)為如式(14)所示:
對(duì)于上述模型,利用擴(kuò)展卡爾曼濾波進(jìn)行信息處理。
假設(shè)在第k時(shí)刻,已得到對(duì)當(dāng)前狀態(tài)的估計(jì)值,估計(jì)方差陣為Pk,當(dāng)測(cè)量到航向、航速后,則利用過(guò)程模型公式(11)進(jìn)行狀態(tài)的一步預(yù)測(cè),得到如式(15)所示:
方差的一步預(yù)測(cè)如式(16)所示:
其中,Qk是隨機(jī)干擾[ωVkωCk]的方差。
然后,基于狀態(tài)的一步預(yù)測(cè),利用公式(10)對(duì)時(shí)延測(cè)量信息進(jìn)行預(yù)測(cè),記為Zk+1。
當(dāng)水聲定位系統(tǒng)檢測(cè)到應(yīng)答信號(hào),給出實(shí)測(cè)距離信息,則可進(jìn)行信息修正,對(duì)本時(shí)刻狀態(tài)和方差進(jìn)行估計(jì),公式如式(17)、式(18)所示:
其中,Kk+1是增益矩陣,如式(19)所示:
其中Rk+1是距離測(cè)量誤差的方差。
這樣公式(15)-公式(19)即單聲信標(biāo)的組合導(dǎo)航卡爾曼濾波處理過(guò)程,實(shí)現(xiàn)航行位置及其誤差方差的估計(jì)。
當(dāng)有多個(gè)信標(biāo)時(shí),既可以將公式(12)和公式(14)改造為多維表達(dá)式(維數(shù)等于信標(biāo)個(gè)數(shù)),同樣采用卡爾曼濾波計(jì)算;也可以仍然采用單信標(biāo)組合導(dǎo)航方法,在每一次測(cè)量得到某一信標(biāo)的距離信息時(shí),即與實(shí)時(shí)推算定位信息進(jìn)行組合導(dǎo)航計(jì)算,而不用等到所有信標(biāo)距離信息均獲得以后再進(jìn)行計(jì)算,這樣放松了水聲定位對(duì)信標(biāo)數(shù)量的要求,實(shí)現(xiàn)了可用信標(biāo)數(shù)量不固定情況下的水聲定位。
從此過(guò)程可以看出,通過(guò)將推算定位模型與單信標(biāo)測(cè)距模型相結(jié)合,采用卡爾曼濾波的預(yù)測(cè)-校正體制信息處理方法,實(shí)現(xiàn)了推算定位信息與單信標(biāo)測(cè)距信息的耦合,達(dá)到了僅使用單信標(biāo)距離測(cè)量信息也可實(shí)現(xiàn)水聲定位的功能。
3 仿真分析
對(duì)上述過(guò)程進(jìn)行仿真分析,考慮如下兩種情況。
(1)單信標(biāo)情況,仿真條件如下:信標(biāo)位置為(-2000,-3000,-1000),單位為米(m,下同),稱(chēng)為信標(biāo)1。航行器初始位置為(-3000,-1000,-300),航行器水平航行,航速2m/s(約3.9節(jié)),航向120度。航行推算定位,初始位置誤差設(shè)置為x,y方向具為方差為500m的高斯白噪聲,航向測(cè)量誤差包括1度的常值誤差和方差為0.5度的高斯白噪聲;航速測(cè)量誤差包括0.1m/s的常值誤差和方差為0.1m/s的高斯白噪聲。信標(biāo)距離測(cè)量誤差為方差5m的白噪聲。仿真結(jié)果如圖2、圖3所示。
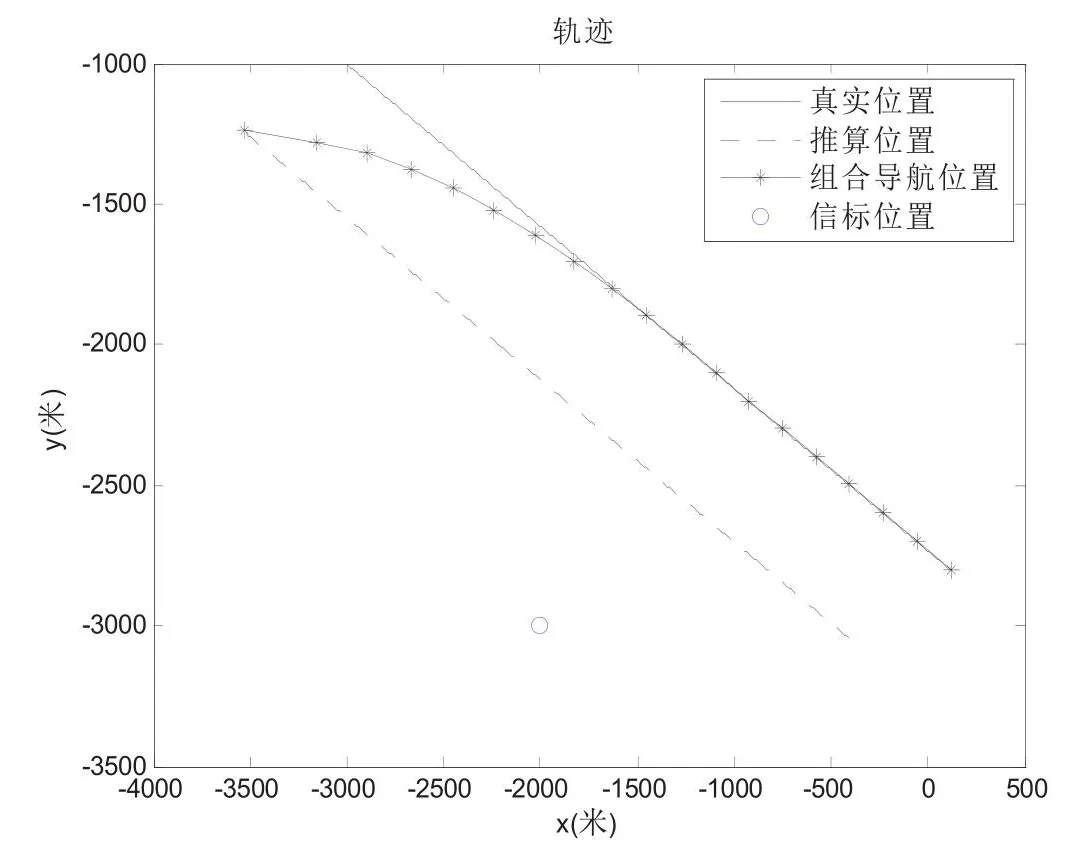
圖2 航行器定位軌跡(單信標(biāo)情況)Fig.2 Positioning trajectory of UUV(single beacon)
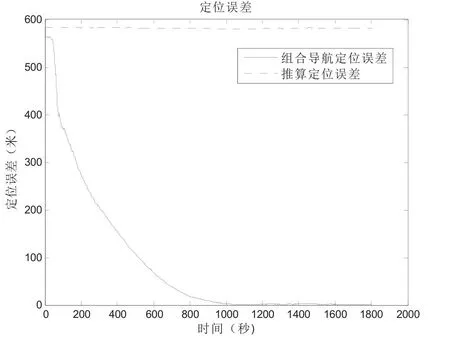
圖3 導(dǎo)航定位誤差曲線(單信標(biāo)情況)Fig.3 Error of position(single beacon)
從仿真圖可以看出,對(duì)于近600m的初始位置誤差,在推算定位中,定位誤差緩慢增加,而組合導(dǎo)航可使位置誤差迅速減小,隨著測(cè)量不斷進(jìn)行,組合導(dǎo)航定位誤差不斷減小,最終定位誤差穩(wěn)定小于5m。
(2)有多個(gè)信標(biāo)的情況,假設(shè)有2個(gè)信標(biāo)(多于2個(gè)信標(biāo)的水聲定位效果比較理想,這里不考慮),另一信標(biāo)位置為(-2500,-1000,-800),稱(chēng)為信標(biāo)2。航行器航向135度,速度2m/s。假設(shè)在航行前600s和后600s,分別只接收信標(biāo)1和信標(biāo)2的信號(hào),在航行過(guò)程中間600s,受海洋環(huán)境的影響,航行器以等概率隨機(jī)接收信號(hào)1、信號(hào)2或2個(gè)信標(biāo)的信號(hào),仿真結(jié)果如圖4-圖6所示。
從圖4和圖5可以看出,在可接收信號(hào)的信標(biāo)數(shù)量不固定的情況下,利用單信標(biāo)測(cè)距和推算定位組合導(dǎo)航方法,仍然能夠有效地對(duì)航行器進(jìn)行定位,定位誤差逐漸收斂。
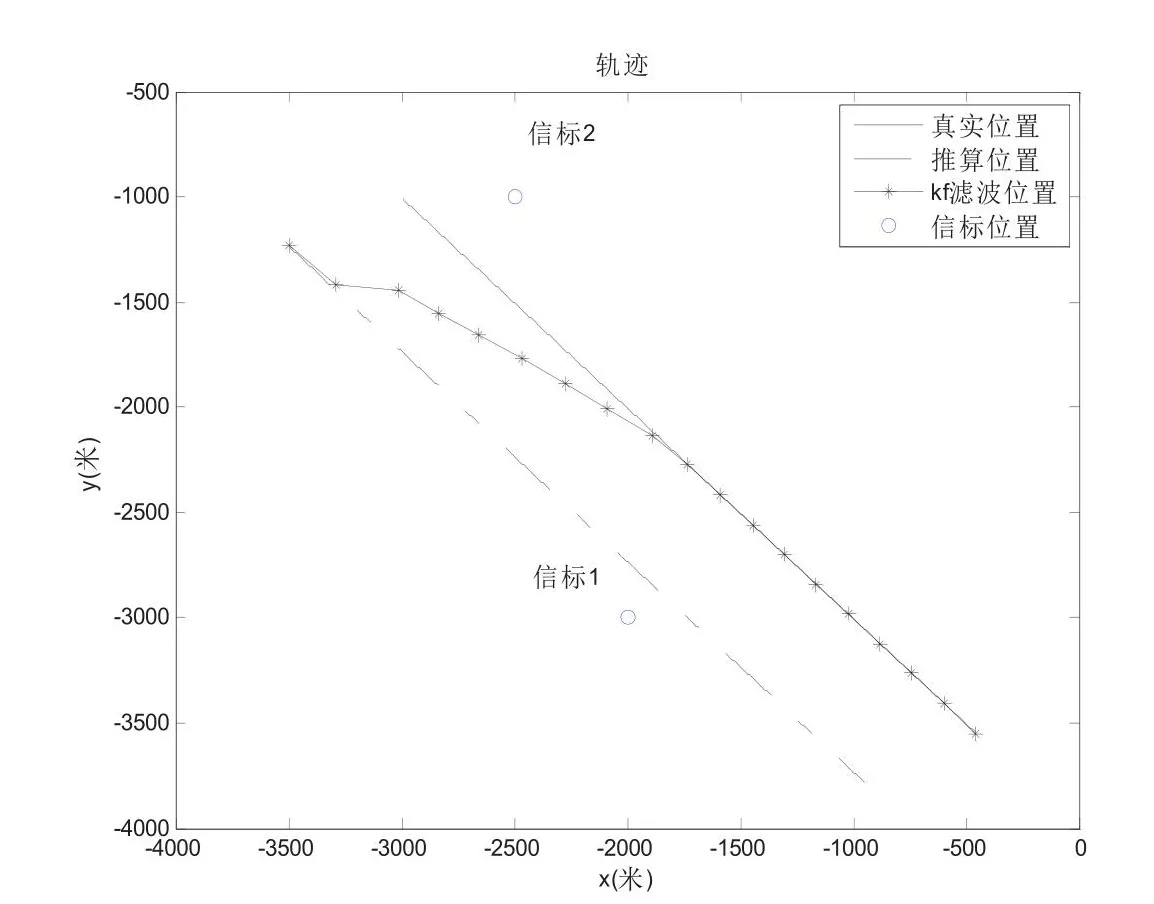
圖4 航行器定位軌跡圖Fig.4 Positioning trajectory of UUV
從圖6可以看出,航行中間階段,航行器接收信標(biāo)信號(hào)的情況具有隨機(jī)性,對(duì)照?qǐng)D5中相應(yīng)時(shí)間段的誤差曲線,可以看出,采用本文方法,在接收信標(biāo)信號(hào)具有隨機(jī)性、可用信標(biāo)數(shù)量不固定的情況下,定位誤差依然能夠較好的收斂。
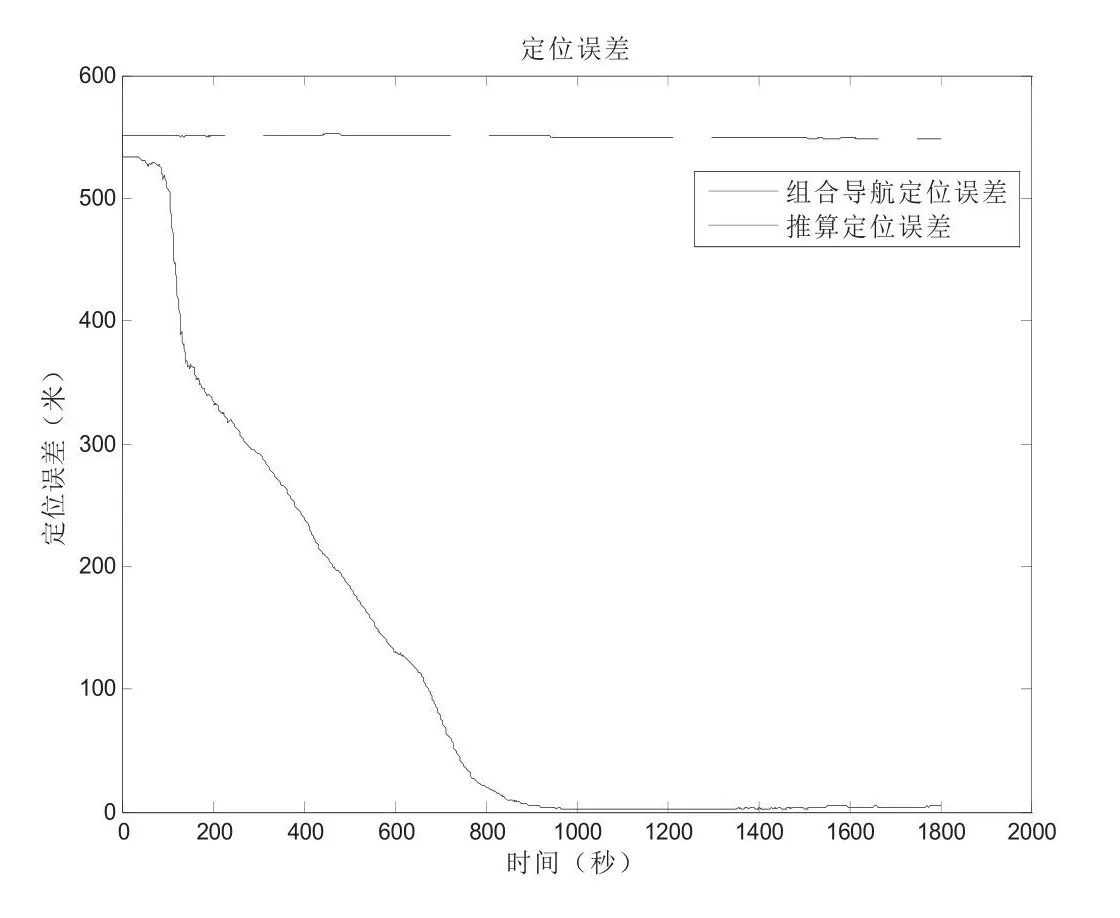
圖5 導(dǎo)航定位誤差曲線Fig.5 Error of position
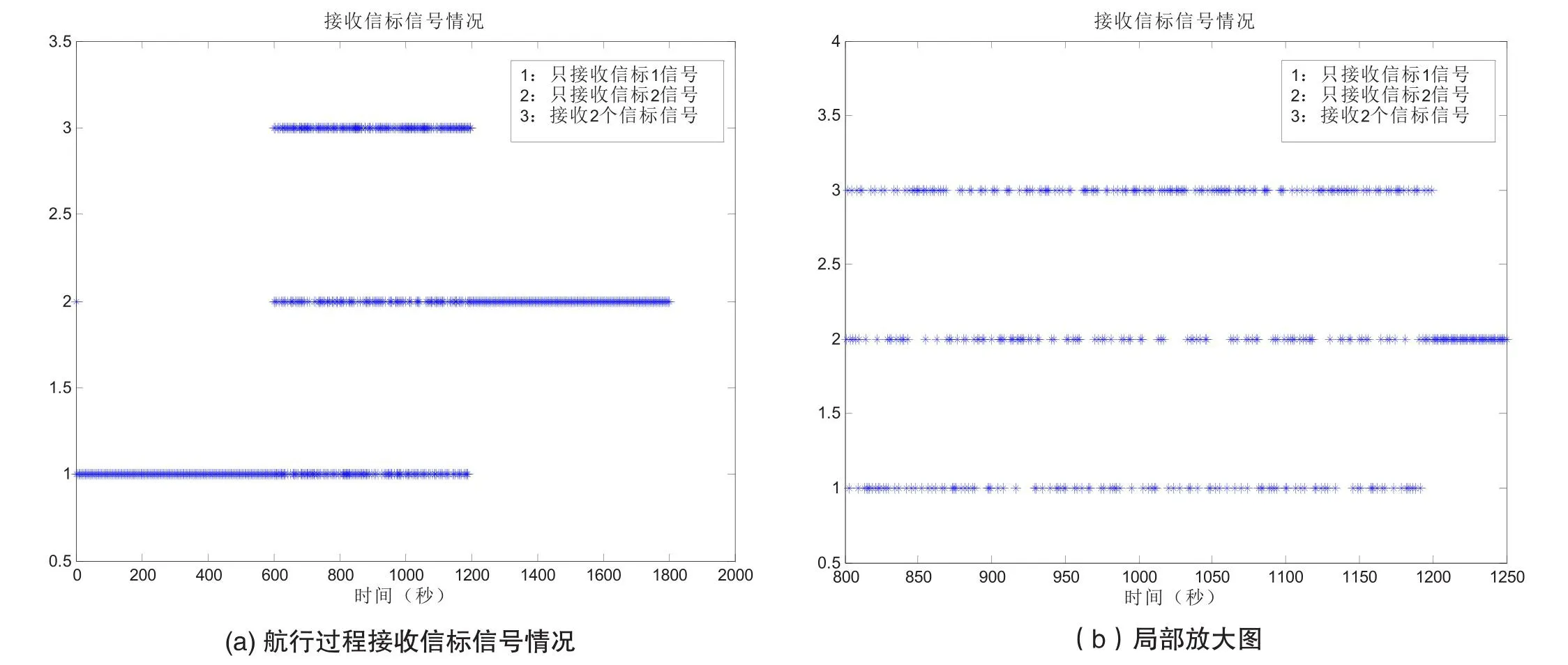
圖6 航行器接收信標(biāo)信號(hào)的情況Fig.6 Beacon receive condition of UUV
在多次仿真中還發(fā)現(xiàn),航行器的航跡對(duì)組合導(dǎo)航定位結(jié)果有一定影響,特別是當(dāng)只能接收一個(gè)信標(biāo)信號(hào)時(shí)。對(duì)照?qǐng)D3和圖5的初始階段,可以看出第二情況仿真時(shí),由于航跡更靠近信標(biāo)1,導(dǎo)致定位誤差收斂相對(duì)較慢。這一現(xiàn)象可從控制理論對(duì)其進(jìn)行解釋[5],是因?yàn)樵诖撕桔E情況下,系統(tǒng)的可觀測(cè)性較弱,因此組合導(dǎo)航定位誤差收斂較慢,在進(jìn)入第二階段后,可收到不同信標(biāo)信號(hào)或可收到2個(gè)信標(biāo)的信號(hào)時(shí),收斂速度加快,效果改善。
4 結(jié)語(yǔ)
本文所提出基于單信標(biāo)測(cè)距信息/推算定位的組合導(dǎo)航方法,對(duì)于單信標(biāo)聲學(xué)定位具有較好效果。在實(shí)際水下聲學(xué)定位的應(yīng)用過(guò)程中,受海水聲波傳輸特性復(fù)雜的影響,聲信號(hào)接收具有較大的不確定性,容易導(dǎo)致可接收信號(hào)的信標(biāo)數(shù)量不夠、信號(hào)接收不同步等情況。本文的方法具有一定的通用性,可以有效應(yīng)對(duì)這些情況,具有較大的應(yīng)用價(jià)值。
引用
[1]付進(jìn).長(zhǎng)基線定位信號(hào)處理若干關(guān)鍵技術(shù)研究[D].哈爾濱:哈爾濱工程大學(xué),2007.
[2]田坦.水下定位與導(dǎo)航技術(shù)[M].北京:國(guó)防工業(yè)出版社,2007.
[3]張福斌,張永清.一種利用單信標(biāo)修正AUV定位誤差的方法[J].魚(yú)雷技術(shù),2012,20(1):38-41.
[4]曹俊.基于單信標(biāo)測(cè)距的水下載體定位研究[D].哈爾濱:哈爾濱工程大學(xué),2017.
[5]嚴(yán)衛(wèi)生,房新鵬,崔榮鑫.單信標(biāo)測(cè)距AUV水下定位系統(tǒng)觀測(cè)性分析[J].中南大學(xué)學(xué)報(bào)(自然科學(xué)版),2012,43(8):3085-3090.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
中華手工(2017年2期)2017-06-06 23:00:31
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
中外會(huì)展(2014年4期)2014-11-27 07:46:46
祝您健康(1987年3期)1987-12-30 09:52:32
