基于增強(qiáng)學(xué)習(xí)算法的微電網(wǎng)智能頻率協(xié)調(diào)控制策略
2023-03-15 14:17:28姜展鵬劉守恒郝立超
東北電力技術(shù) 2023年2期
關(guān)鍵詞:設(shè)備
姜展鵬,劉 洋,劉守恒,郝立超
(1.沈陽工業(yè)大學(xué)電氣工程學(xué)院,遼寧 沈陽 110870;2.中電投東北新能源發(fā)展有限公司,遼寧 沈陽 110170)
隨著“雙碳”戰(zhàn)略的實(shí)施,可再生能源如風(fēng)能、水能、太陽能引起了人們廣泛關(guān)注,其中光伏發(fā)電是利用太陽能發(fā)電的一種常見形式。然而,光伏發(fā)電具有很強(qiáng)的不確定性,尤其在陰天具有很強(qiáng)的波動(dòng)性,由于不知光伏陣列上方何時(shí)有云遮擋,光伏發(fā)電功率很難預(yù)測[1-4],同時(shí),由于人們生活水平的提高,負(fù)荷種類也越來越多,且有極大的不確定性,嚴(yán)重影響了微電網(wǎng)頻率的穩(wěn)定性。
微電網(wǎng)頻率波動(dòng)可能影響用電設(shè)備,解決這個(gè)問題通常有減少發(fā)電的不確定性和利用控制策略來穩(wěn)定頻率2種方式。由于天氣實(shí)時(shí)變化的因素,很難預(yù)測光伏發(fā)電的功率,因此,很多學(xué)者更加青睞于第2種方式。
增強(qiáng)學(xué)習(xí)算法是一種具有函數(shù)逼近最優(yōu)性的有效方法,特別適用于非線性系統(tǒng)和復(fù)雜系統(tǒng)。在面對(duì)“維數(shù)災(zāi)”時(shí),可以得到近似最優(yōu)解[5-9]。增強(qiáng)學(xué)習(xí)算法在電力系統(tǒng)領(lǐng)域應(yīng)用頗豐,在文獻(xiàn)[10]中,通過基于數(shù)據(jù)的策略迭代對(duì)一類離散時(shí)間系統(tǒng)進(jìn)行H∞控制,并將其應(yīng)用于風(fēng)力渦輪機(jī)。在文獻(xiàn)[11]中,設(shè)計(jì)了一種基于自適應(yīng)動(dòng)態(tài)規(guī)劃的控制方案,以輔助電力系統(tǒng)的負(fù)荷頻率控制。在文獻(xiàn)[12]中,研究了基于數(shù)據(jù)的魯棒值迭代方法,并將其應(yīng)用于風(fēng)機(jī)變槳距控制。在文獻(xiàn)[13]中,采用自適應(yīng)的設(shè)計(jì)方法,在智能電網(wǎng)中應(yīng)用了一種基于廣域測量的動(dòng)態(tài)隨機(jī)最優(yōu)潮流控制算法。然而,在現(xiàn)有的電力系統(tǒng)研究中,增強(qiáng)學(xué)習(xí)算法經(jīng)常被設(shè)計(jì)為輔助控制,而利用增強(qiáng)學(xué)習(xí)算法對(duì)電力系統(tǒng)直接控制卻很少見[14-15]。本文利用增強(qiáng)學(xué)習(xí)算法直接控制微型燃?xì)廨啓C(jī)和儲(chǔ)能設(shè)備的輸出功率來抑制頻率波動(dòng),為未來微電網(wǎng)的應(yīng)用提供了理論依據(jù)。
1 基于儲(chǔ)能的微電網(wǎng)模型
1.1 基于儲(chǔ)能的具有不確定性的微電網(wǎng)
本文研究了由光伏發(fā)電、負(fù)荷需求、儲(chǔ)能系統(tǒng)和微型燃?xì)廨啓C(jī)組成的微電網(wǎng),如圖1所示。
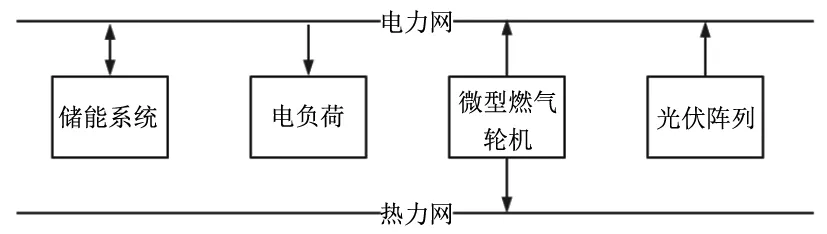
圖1 微電網(wǎng)結(jié)構(gòu)
等效微型燃?xì)廨啓C(jī)、儲(chǔ)能系統(tǒng)和電力系統(tǒng)的傳遞函數(shù)分別為G(t)、Ge、Gp,公式如下:
(1)
式中:Tt、Te、Tp分別為微型燃?xì)廨啓C(jī)、儲(chǔ)能設(shè)備和系統(tǒng)慣性的時(shí)間常數(shù);kp為電力系統(tǒng)的增益系數(shù)。
定義x(t)=[Δf(t),ΔPt(t),ΔPe(t)]T∈m作為初始狀態(tài)為x(0)的微電網(wǎng)的狀態(tài)向量。式中:Δf(t)為頻率偏差;ΔPt(t)為微型燃?xì)廨啓C(jī)的頻率輸出;ΔPe(t)為儲(chǔ)能設(shè)備的功率輸出。
頻率動(dòng)力學(xué)可以描述如下:
(2)
(3)
(4)
式中:Δpl(t)為負(fù)荷變化;Δpp(t)為光伏發(fā)電產(chǎn)生的不確定性;R為調(diào)速系數(shù);ut(t)為微型渦輪機(jī)的控制信號(hào);ue(t)為儲(chǔ)能設(shè)備的控制信號(hào)。微電網(wǎng)的頻率動(dòng)力學(xué)可以用以下形式表示:

(5)
(6)
(7)
(8)
式中:A為系統(tǒng)矩陣;B為控制矩陣;u(t)=[ut(t),ue(t)]T∈n為控制輸入;Π(t)表示光伏發(fā)電以及負(fù)荷的不確定性。
1.2 儲(chǔ)能設(shè)備運(yùn)行限制狀態(tài)
微電網(wǎng)中儲(chǔ)能設(shè)備的主要作用是抑制由光伏發(fā)電和負(fù)荷不確定性引起的頻率波動(dòng),對(duì)于該場景下的儲(chǔ)能設(shè)備具有如下荷電狀態(tài)限制:
(9)


(10)
其余情況時(shí):
Soc(t+1)=Soc(t)
(11)

1.3 微電網(wǎng)調(diào)頻過程
在調(diào)頻過程中,考慮負(fù)載和光伏發(fā)電功率的不確定性,利用儲(chǔ)能設(shè)備智能充放電來抑制該不確定性,具體調(diào)頻過程如圖2所示。
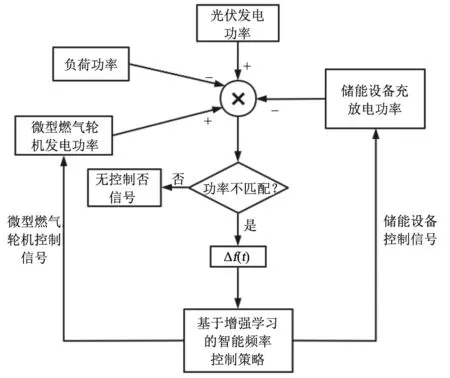
圖2 微電網(wǎng)頻率調(diào)節(jié)過程
2 基于增強(qiáng)學(xué)習(xí)算法的智能頻率調(diào)節(jié)
本文設(shè)計(jì)了一種基于負(fù)荷變化和光伏發(fā)電不確定性引起的功率不確定性的微電網(wǎng)頻率智能控制策略,采用增強(qiáng)學(xué)習(xí)算法進(jìn)行調(diào)節(jié),并由神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn)。
微電網(wǎng)Δf(t),ΔPt(t),ΔPe(t)的狀態(tài)均為頻率控制器的輸入端。
2.1 增強(qiáng)學(xué)習(xí)算法的控制器設(shè)計(jì)
所研究的微電網(wǎng)的頻率動(dòng)態(tài)用式(5)表示,對(duì)于頻率控制,設(shè)計(jì)了一個(gè)狀態(tài)反饋控制律u(t)來調(diào)節(jié)微型燃?xì)廨啓C(jī)和儲(chǔ)能設(shè)備的功率輸出,通過對(duì)不確定系統(tǒng)的頻率最優(yōu)控制,可以得到對(duì)不確定頻率動(dòng)力系統(tǒng)式(5)的魯棒控制,并表示為

(12)
對(duì)于系統(tǒng)式(12),通過最小化代價(jià)函數(shù)設(shè)計(jì)了控制律u(t)。

(13)
式中:U(x(t),u(t))為效用函數(shù),U(x(t),u(t))=xT(t)Qx(t)+uT(t)Ru(t);Q,R為具有適當(dāng)維數(shù)的正定對(duì)稱矩陣。
最優(yōu)代價(jià)函數(shù)定義為
(14)
基于貝爾曼最優(yōu)性原理,可以得到哈密頓函數(shù)為

+U(x(t),u(t))
(15)
最優(yōu)控制律u*(t)滿足哈密頓-雅可比-貝爾曼方程。

(16)
式中:Ωc為1個(gè)可接受的控制集。
由此可以推斷出系統(tǒng)式(12)的最優(yōu)頻率控制律為
(17)
將最優(yōu)控制律式(17)代入(16),然后將HJB方程進(jìn)一步轉(zhuǎn)化為以下形式。

(18)
最優(yōu)HJB方程符合0=H(x(t),u*(t),?J*(x)),u*(t)為最優(yōu)控制律。
2.2 增強(qiáng)學(xué)習(xí)算法的迭代算法
一般來說,由于式(18)中存在偏微分項(xiàng),幾乎不可能直接求解,因此,利用迭代算法得到了最優(yōu)控制律u*(t)和最優(yōu)代價(jià)函數(shù)J*(x)的近似解。迭代算法流程如下:
a.初始化
設(shè)置迭代索引i=0,并讓J(i)(x)=0。定義一個(gè)足夠小的正數(shù)ε作為停止該算法的先決條件,從一個(gè)初始可接受的控制律u(0)(t)開始迭代。
b.迭代過程
在第1次迭代過程中,用J(0)(x)=0將初始值u(0)(t)代入式(18),然后,J(i+1)(x)可以用式(19)表示:
0=(?J(i+1)(x))T(Ax(t)+Bu(i)(t))+U(x(t),u(i)(t))
(19)
c.更新控制律
根據(jù)式(20)更新控制律u(i+1)(t)。
(20)
d.停止條件

在此迭代過程中,迭代控制律u(i+1)(t)近似收斂到最優(yōu)控制律u*(t),隨著迭代指數(shù)足夠大,迭代代價(jià)函數(shù)J(i+1)(x)也收斂到最優(yōu)值J*(x)。
2.3 智能頻率控制的神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn)
假設(shè)存在權(quán)值W1,使得J(x)被一個(gè)神經(jīng)網(wǎng)絡(luò)近似為
(21)
式中:φ1(x):n→N為激活函數(shù)向量;N為隱層神經(jīng)元數(shù);ε(x)為神經(jīng)網(wǎng)絡(luò)近似誤差。選擇激活函數(shù)以提供一個(gè)完整的基集,使J(x)及其導(dǎo)數(shù)一致。

(22)
神經(jīng)網(wǎng)絡(luò)權(quán)值W1未知,那么神經(jīng)網(wǎng)絡(luò)的輸出為
(23)


U(x(t),u*(t))=e1
(24)
利用神經(jīng)網(wǎng)絡(luò)近似方法可以得到系統(tǒng)式(12)的近似最優(yōu)控制律。
(25)

(26)
通過最小化平方誤差,權(quán)值更新定律可以設(shè)計(jì)為
(27)
式中:γc>0為評(píng)價(jià)網(wǎng)絡(luò)的主要學(xué)習(xí)速率;γa>0為輔助學(xué)習(xí)速率;Js(x)=0.5xT(t)x(t)是根據(jù)李雅普諾夫定理選擇的。
因此,利用權(quán)值更新定律可以得到評(píng)價(jià)網(wǎng)絡(luò)的估計(jì)權(quán)值,可以為系統(tǒng)提供頻率控制律。
3 仿真分析
根據(jù)圖2給出的微電網(wǎng)日前調(diào)度曲線,對(duì)微電網(wǎng)模型進(jìn)行仿真,抑制光伏發(fā)電及負(fù)荷不確定性引起的頻率波動(dòng),提高微電網(wǎng)供電可靠性。在頻率調(diào)節(jié)中考慮儲(chǔ)能設(shè)備的功率約束,微電網(wǎng)參數(shù)如下:Tt=0.2,Te=0.7,Tp=9,kp=1,R=0.1,儲(chǔ)能設(shè)備功率約束見表1。

表1 儲(chǔ)能設(shè)備功率約束
由于光伏電源連接到微電網(wǎng),本文考慮了光照和溫度2個(gè)影響光伏功率的主要因素,受環(huán)境影響的光伏發(fā)電不確定性如圖3所示。同時(shí),考慮了實(shí)際負(fù)荷需求的不確定性,如圖4所示。
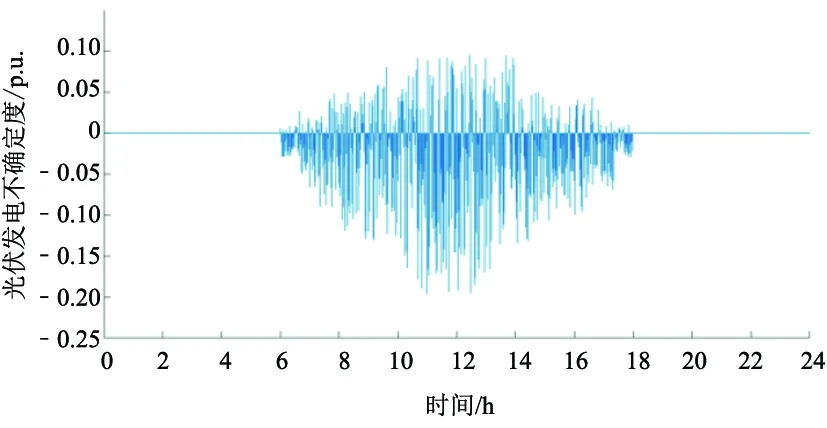
圖3 光伏發(fā)電不確定度
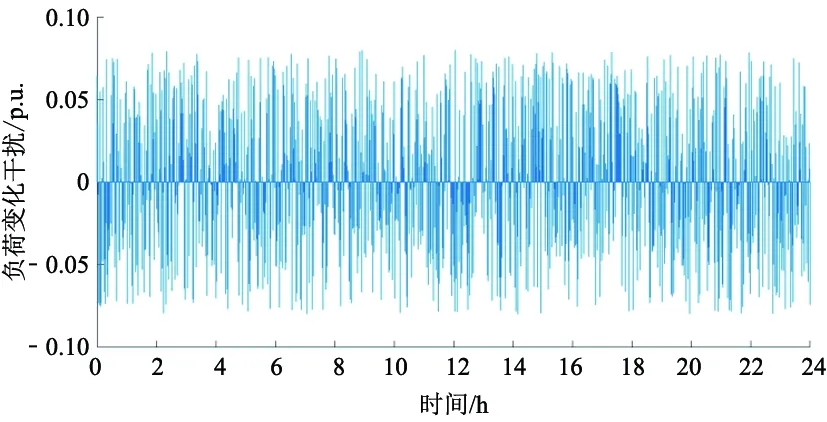
圖4 負(fù)荷變化干擾
在智能頻率控制中,所使用的參數(shù)如下:Q=2.5×I3×3,R=2.5×I2×2,γc=0.9,γa=0.15,其中I為單位矩陣。根據(jù)系統(tǒng)數(shù)據(jù),可以得到評(píng)價(jià)網(wǎng)絡(luò)的權(quán)值,如圖5所示。
根據(jù)頻率控制器在隨機(jī)干擾激勵(lì)下,頻率偏差Δf(t)、微型燃?xì)廨啓C(jī)功率輸出ΔPt(t)和儲(chǔ)能設(shè)備功率輸出ΔPe(t)的變化誤差最終收斂為零,如圖6所示,即通過神經(jīng)網(wǎng)絡(luò)訓(xùn)練過程。至此,微電網(wǎng)智能頻率控制策略訓(xùn)練過程完畢。
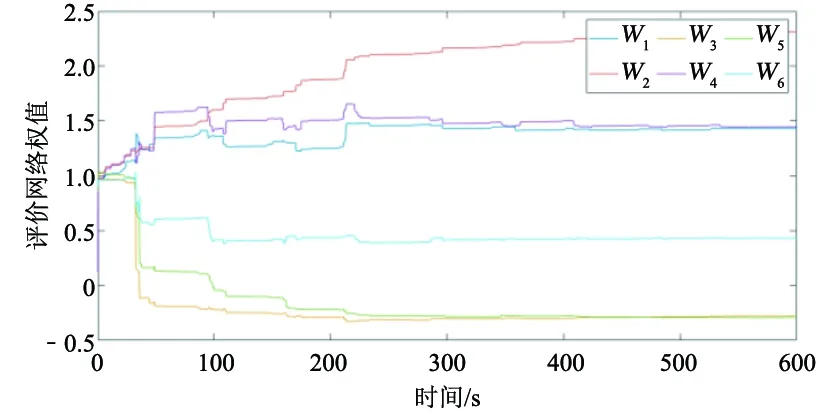
圖5 在訓(xùn)練過程中的權(quán)重更新律
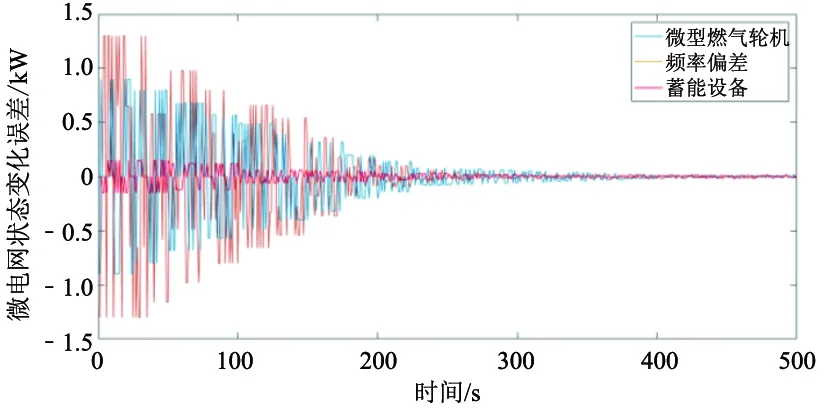
圖6 微電網(wǎng)系統(tǒng)的狀態(tài)收斂
儲(chǔ)能設(shè)備在該控制策略中應(yīng)用于整個(gè)微電網(wǎng)頻率調(diào)節(jié)過程,維持微電網(wǎng)頻率穩(wěn)定,提高了微電網(wǎng)供電可靠性。
4 結(jié)語
本文研究了具有光伏發(fā)電和負(fù)荷不確定性的微電網(wǎng)頻率控制問題,設(shè)計(jì)了一種基于增強(qiáng)學(xué)習(xí)算法的智能控制策略,并由神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn),通過調(diào)節(jié)微型燃?xì)廨啓C(jī)和儲(chǔ)能設(shè)備的功率輸出,抑制微電網(wǎng)頻率波動(dòng),可有效提高供電可靠性,增加用戶用電滿意度。仿真結(jié)果顯示,所提出的智能頻率控制策略能夠較好地調(diào)整頻率波動(dòng)。在未來,可以考慮微電網(wǎng)的拓?fù)浣Y(jié)構(gòu),將該控制策略應(yīng)用于更多場景。
猜你喜歡
中國特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
當(dāng)代工人(2020年13期)2020-09-27 23:04:20
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(shù)(2017年11期)2017-12-20 08:10:57
工業(yè)設(shè)計(jì)(2016年12期)2016-04-16 02:52:00
IT時(shí)代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(yǎng)(2015年1期)2015-04-17 03:25:28
設(shè)備管理與維修(2015年12期)2015-04-09 06:57:00