新型碟式太陽能聚光器跟蹤機構優化設計
2023-03-11 06:14:00劉繁茂廖燦燦張原愿
中國機械工程 2023年4期
關鍵詞:優化
劉繁茂 廖燦燦 張原愿 莫 寒
湖南科技大學機電工程學院,湘潭,411201
0 引言
隨著化石能源的日益枯竭和環境問題的日漸嚴重,太陽能以其儲量的無限性、存在的普遍性以及經濟性等優勢,成為人類亟待大力發展的替代能源。目前,太陽能收集系統主要有碟式、槽式、塔式和光伏等系統[1-2],其中碟式太陽能發電系統具有結構緊湊、聚光效果好、光熱轉換率高等優點,被認為是發展空間最大的一種[3]。在碟式太陽能發電系統領域,美國、德國以及中國等國家取得了大的進展,如美國的McDonnelln Douglas系統[4]、德國的EuroDish系統[5]、中國湘電集團研制的38 kW聚光裝置[6-7]等,上述碟式太陽能發電系統采用雙軸跟蹤式。雙軸跟蹤機構主要是基于串聯機構設計的,豎直轉軸作為方位驅動裝置完成太陽方位角的跟蹤,水平轉軸作為俯仰驅動裝置完成太陽高度角的跟蹤。由于豎直轉軸固定在地面,承擔整個跟蹤系統的質量,導致末端驅動裝置的負載較大,且能源消耗巨大。此外,由于豎直轉軸和水平轉軸采用串聯的傳動方式協同運動,太陽方位角和太陽高度角的跟蹤誤差相互累計,加上風沙等外載荷的影響,因此跟蹤系統的精度保持性較差。針對傳統碟式太陽能跟蹤系統存在的能耗大和跟蹤精度保持性差等問題,部分研究人員采用并聯機構作為碟式太陽能發電系統的跟蹤機構。于振洋等[8]提出了一種具有驅動冗余的并聯式太陽能聚光器跟蹤機構,該裝置具有剛度高和能耗低的優點。WU等[9]基于U-3PSS機構設計了新型碟式太陽能跟蹤裝置,具有較大的工作空間和低能耗的優勢。并聯機構作為碟式太陽能發電系統的跟蹤裝置,可以實現反射鏡的多維運動,與太陽的視日軌跡更加吻合,能夠充分吸收轉換太陽能,有效解決裝置提高發電效率、結構復雜等問題。
本文提出一種動、定平臺為任意三角形的通用3-RPS并聯機構,基于該機構設計了一種新型碟式太陽能跟蹤平臺,與雙自由度跟蹤裝置相比,3-RPS并聯機構具有1個移動和2個轉動自由度,完全能夠實現太陽的視日跟蹤,最大化地收集太陽能,文獻[10-14]均為基于并聯機構設計的太陽能跟蹤裝置。3-RPS并聯機構包括3個驅動支鏈,各驅動支鏈相互獨立,共同改變作為末端執行器的聚光器鏡面單元的位姿,實現太陽位置的跟蹤,無累計誤差且負載分擔給多個分支,相同負載下的聚光器具有更好的剛度和穩定性,同時結構緊湊、安裝靈活;該跟蹤平臺的聚光器由傳統碟式聚光器改進而來,可以采用已有的旋轉拋物面聚光器,且它既可采用雙曲面聚光器,又可采用橢圓面聚光器,減少了鏡面設計制造和安裝調試的費用。從控制上看,單塊聚光器鏡面單元具有單獨的跟蹤裝置,控制器相互獨立,若跟蹤誤差導致聚光器鏡面單元的法線發生偏移,可自動補償跟蹤誤差,調整聚光器鏡面單元的位姿,從而達到自適應的目的。
并聯機構結構參數優化的方法很多,如遺傳算法[15]、粒子群算法[16-17]、空間模型法[18]等,本文針對太陽能跟蹤裝置的設計與應用要求,定義全域靈巧度性能指標、全域剛度性能指標、全域承載能力性能指標,采用線性加權法實現結構參數尺度優化,最終確定一組綜合性能較優的幾何結構參數,并采用ANSYS有限元軟件證明了該參數下太陽能跟蹤裝置的各項性能指標均有一定程度的提高。
1 新型碟式太陽能聚光器結構設計
圖1所示為所設計的新型碟式太陽能聚光器,由光學鏡面組件、跟蹤機構、輔助電機設備等組成。其中跟蹤機構主要由動平臺、新型被動球鉸鏈、驅動裝置、轉動副、定平臺組成。考慮到聚光器的制造、運輸、安裝等過程,注重聚光器鏡面單元的模塊化設計,在本設計中,拋物面反射鏡分成相同5塊鏡面,鏡面方程可表示為x2+y2=4fz,其中f為碟式拋物面聚光器的焦距。接收器安裝在焦點處,Φ為鏡面的開口直徑。動平臺作為安裝單塊鏡面的背板,安裝在碟式聚光鏡的相切基準平面上,聚光器鏡面單元之間留有足夠的間隙以防止發生干涉和減少風載荷的影響。由于聚光器鏡面單元的排布設計,動、定平臺形狀采用構型為“上大下小”的相似等腰三角形,與定平臺連接的轉動副、驅動裝置、與動平臺連接的球副共同組成RPS支鏈(R、P、S分別為轉動副、移動副、球副),則此新型碟式太陽能聚光器的單個跟蹤機構的原型為3-RPS并聯機構(圖2)。
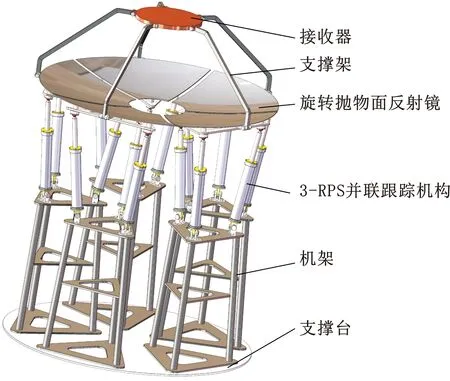
圖1 新型碟式太陽能聚光器Fig.1 The new type dish solar concentrator
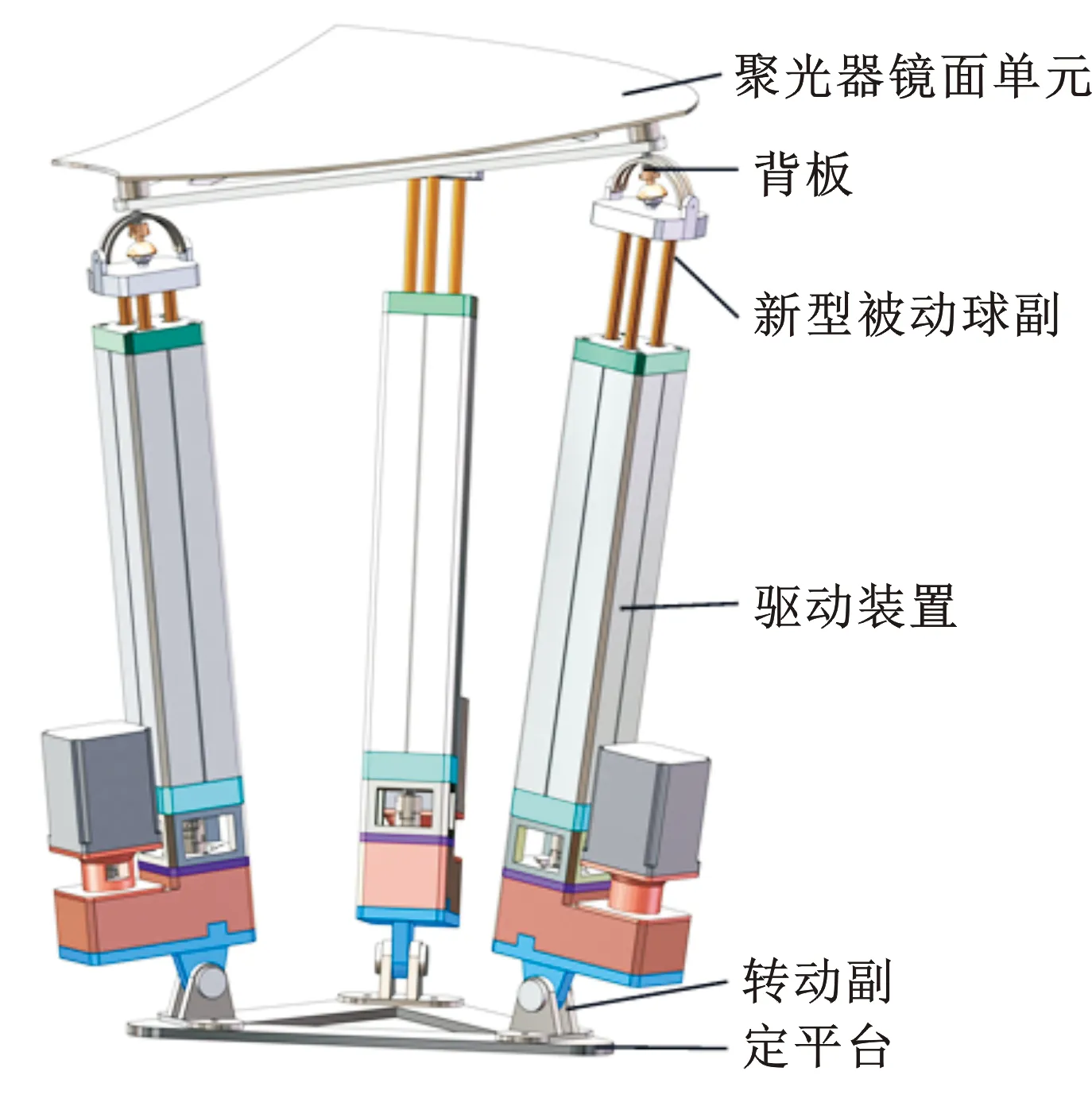
圖2 單個跟蹤機構示意圖Fig.2 Schematic diagram of single tracking mechanism
為提高并聯跟蹤機構的剛度,提出一種改進型RPS支鏈,主要由旋轉電機、同步帶傳動組件、滾珠絲杠副、新型被動球鉸等組成,如圖3所示。滾珠螺母置于滑動活塞內,旋轉電機與滾珠絲杠之間通過同步帶傳動連接,將電機的旋轉運動轉換為滑動活塞在滑桿外套內的直線運動。滑桿通過螺釘固定在滑動活塞上,在跟蹤過程中承載著鏡面和動平臺的質量,此時力主要沿RPS支鏈方向,采用均勻分布的3根滑桿負載,提高3-RPS并聯跟蹤機構的承載能力。多個3-RPS并聯跟蹤機構相互獨立,協同控制使得聚光器保持拋物面不變。
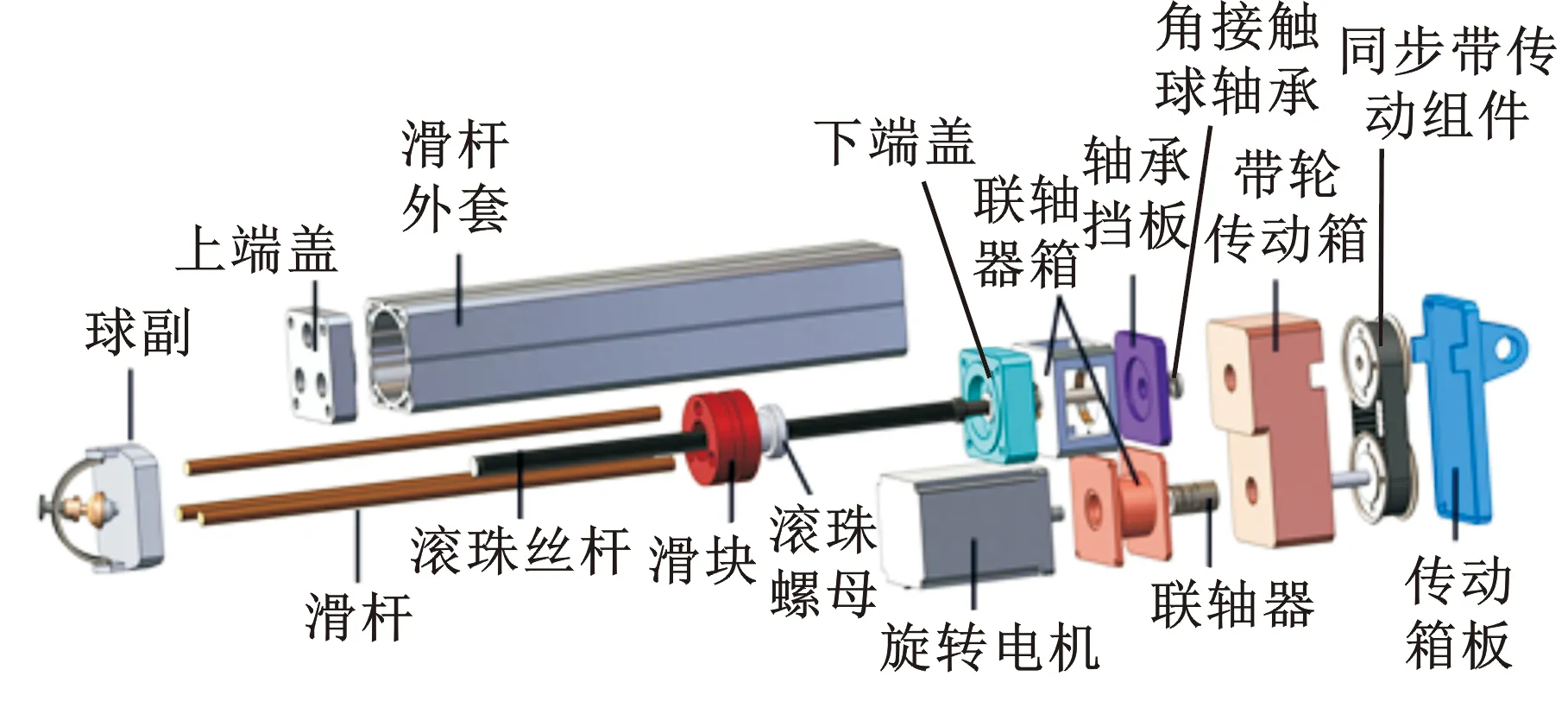
圖3 RPS支鏈結構爆炸圖Fig.3 Exploded view of RPS branch chain structure
2 位置逆解與雅可比矩陣
2.1 機構位置逆解
經典3-RPS并聯機構的構型為動、定平臺為等邊三角形且轉動副軸線共面并平行于三角形對邊[19-20],對于新型碟式太陽能聚光器,由于聚光器鏡面單元的排布設計,動平臺安裝于鏡面單元相切的基準平面上,在單塊鏡面單元尺寸確定的情況下,動平臺形狀應與單塊鏡面單元在安裝平面的投影相近,基于此,3-RPS并聯跟蹤機構的動、定平臺為等腰三角形為宜,下文建立通用3-RPS 并聯機構的位置逆解方程。
在通用3-RPS并聯機構中,動、定平臺為任意三角形,且轉動副軸線垂直于定平臺中心與頂點的連線。圖4為通用3-RPS并聯機構的結構簡圖,設動平臺球副中心點為Si,定平臺轉動副中心點為Bi,令動、定平臺的外接圓半徑分別為R、r,以動平臺中心C為原點建立動坐標系CX1Y1Z1,Z1軸垂直于動平臺豎直向上,X1軸正向沿直線CS1指向S1,Y1軸由右手定則確定。同樣以定平臺中心O為原點建立定坐標系OX2Y2Z2,Z2軸豎直向上,X2軸正向沿直線OB1指向B1,Y2軸由右手定則確定。
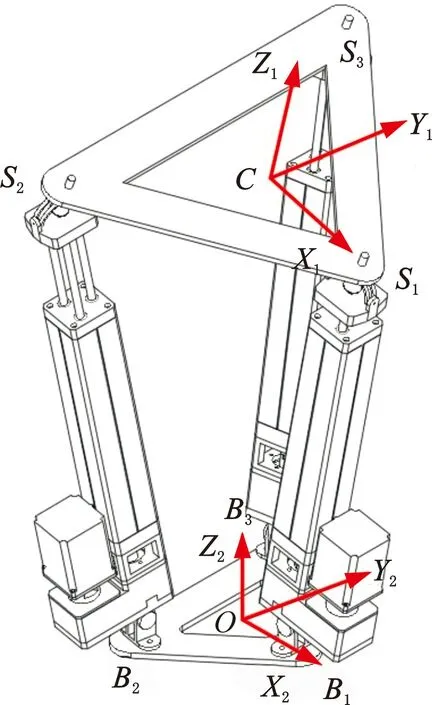
圖4 通用3-RPS并聯機構的結構簡圖Fig.4 Kinematic diagram of general 3-RPS parallel mechanism
用向量矩陣PCS和POB表示出CSi和OBi,即:
(1)
(2)
式中,cφ表示cosφ,sφ表示sinφ,下文出現的正弦和余弦函數都作類似簡化;φ為向量OB1與OB2、向量CS1與CS2之間的夾角;φ為向量OB1與OB3、向量CS1與CS3之間的夾角,逆時針方向為正;R為動平臺半徑;r為定平臺半徑。
通用3-RPS并聯機構的動平臺具有沿Z1軸方向的移動自由度和繞X1、Y1軸的兩個偏轉自由度,為便于分析動平臺的偏轉能力,采用Z-Y-X型歐拉角(γ,β,α)描述動平臺姿態,則其姿態矩陣為
(3)
動平臺球副中心Si在定坐標系可表示為
(4)
式中,(xC,yC,zC)T為點C在定坐標系的坐標。
根據通用3-RPS并聯機構支鏈向量Li恒垂直于轉動副的軸線向量的幾何約束關系,則有
Li·ei=0
(5)
式中,ei=(μi,νi,0)T為轉動副軸線的單位方向向量。
(6)
綜合式(5)和式(6)可求出動平臺的位姿參數(xC,yC,γ)關于機構尺寸參數的位姿耦合關系式:
(7)
式中,h1、h2、h3為關于動平臺位姿參數(α,β)和機構結構尺寸參數的函數式。

根據閉環矢量三角形和定桿長方程可得通用3-RPS并聯機構位置逆解方程:
Li=‖OSi-OBi‖=‖SiBi‖
(8)
2.2 位置逆解驗證
為驗證通用3-RPS并聯機構位置逆解的正確性,本文采用MATLAB軟件進行理論計算,并借助ADAMS軟件進行運動仿真驗證。將簡化后的機構虛擬樣機模型導入ADAMS軟件,并對機構的運動副和驅動進行定義,建立其運動仿真模型,如圖5所示,設置動平臺的運動規律為
(9)

圖5 通用3-RPS并聯機構ADAMS運動仿真模型Fig.5 ADAMS motion simulation model of general 3-RPS parallel mechanism
MATLAB計算的位置逆解結果與ADAMS的仿真結果對比如圖6所示。對比可知,數值計算結果與仿真結果稍有誤差但基本一致,誤差主要來自于ADAMS的測量誤差,由此驗證了位置逆解的正確性。
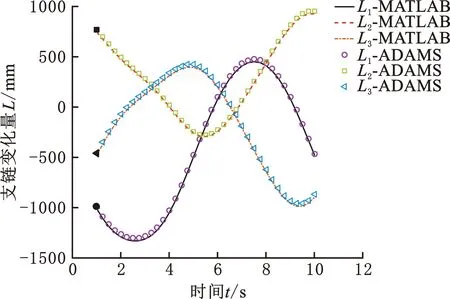
圖6 MATLAB和ADAMS位置逆解結果對比Fig.6 Comparison of MATLAB and ADAMS position inverse simulation results
2.3 雅可比矩陣求解
動平臺上各球副中心點Si的速度矢量可表示為
vsi=v+ω×Ri
(10)
式中,v為動平臺C點的速度,v=(vx,vy,vz)T;ω為動平臺的角速度;Ri為點C指向點Si的位置向量。
RPS支鏈的移動副的線速度vli可表示為速度矢量vsi在支鏈方向li的投影,即
(11)
i=1,2,3
式中,li為RPS支鏈始端指向末端的單位方向向量,li=Li/‖Li‖。
式(11)寫成矩陣形式:
(12)
式中,Jma為機構的驅動雅可比矩陣。
根據螺旋理論,結合圖4可知,通用3-RPS并聯機構各運動關節的運動螺旋為
(13)
式中,Sj,i為第i條RPS支鏈上的第j個運動關節的軸線單位矢量;S為螺旋軸線的單位方向矢量;bi為點O指向點Bi的位置向量;ei為轉動副軸線的單位方向向量。
由螺旋理論可知,運動螺旋與約束螺旋互易積為零,其中約束螺旋為
(14)
動平臺中心C的速度可以表示為
SC=[v;ω]T
(15)
將式(14)與式(15)兩邊作互易求積,可得
(16)
寫成矩陣形式:
(17)
式中,Jmb為機構的約束雅可比矩陣。
綜合式(12)和式(17)可得
(18)

3 機構性能評價指標
3.1 靈巧度
雅可比矩陣的條件數K(J)是定量描述機構輸入和輸出之間的運動/力傳遞精度的重要指標,通常采用雅可比矩陣條件數的倒數來表示并聯機構動平臺在特定位姿下的局部靈巧度[15],即
(19)
其中,K(J)=cond(J)=‖J‖‖J-1‖。局部靈巧度的取值范圍為[0,1],且雅可比矩陣的條件數越小,機構的靈巧度越大,機構運動/力傳遞性能越好。由于LCI只能評價機構在特定位姿下的靈巧度,故引入全域靈巧度指標GCI用以評價機構在工作空間全域下的運動/力傳遞性能,表達式為
(20)
式中,w為機構的可達工作空間。
3.2 剛度指標
機構的剛度是指動平臺在外力/外力矩的作用下,由于部件的彈性變形所引起的位移的大小,它隨著動平臺位姿的變化而變化[21]。機構的系統剛度寫成矩陣表達式為
F=KmΔε
(21)
Km=JTknJ
(22)
kn=diag(k1,k2,k3)
式中,F為作用在動平臺的廣義外力;Δε為在F作用下產生的形變;Km為并聯機構的剛度矩陣;kn為驅動副的關節剛度。
由于剛度矩陣Km是并聯機構剛度的張量測度,因而用來衡量機構的剛度性能不直觀。為了得到衡量剛度的標量測度,引入剛度矩陣的瑞利商S來評價機構的剛度大小[22-23]:
(23)

(24)
3.3 承載能力指標

(25)
聯立式(18)與式(25)可得
N=Jdf
(26)
式中,Jd=JT,Jd為力雅可比矩陣。
承載能力指標定義為當輸入力矢量f的模為1時,輸出力/外力矩矢量N極值的大小[24],為求得N的極值大小,構造拉格朗日目標方程:
(27)
式中,κ為拉格朗日乘子。
式(27)求導得極值條件:
(28)
由式(28)可得動平臺輸出的力/力矩N的極值:
(29)
選取機構的最小承載能力極值‖Nmin‖作為機構在特定位姿下的承載能力指標,‖Nmin‖越大,機構的承載能力越好。同樣地,引入全域承載能力性能指標GL對機構在可達工作空間內的全域承載能力性能進行評價,其計算式如下:
(30)
4 機構參數優化
新型碟式太陽能聚光器在單塊聚光器鏡面單元尺寸確定的情況下,其安裝鏡面單元的3-RPS并聯跟蹤機構的結構參數對跟蹤平臺的工作性能有重要影響。上文建立了多個并聯機構性能指標,本文所設計的新型碟式太陽能聚光器在擁有良好的靈巧度的同時也應具備良好的剛度和承載能力,為此采用多目標遺傳算法進行結構參數優化。
4.1 優化變量
由前文可知,新型碟式太陽能聚光器的主要結構參數有R、r、α、β。由于動平臺作為安裝聚光器鏡面單元的背板,安裝在相切于碟式聚光鏡的基準平面上,在單塊聚光器鏡面單元的尺寸確定的情況下,動平臺半徑R和結構參數α、β是給定的,因此不作為優化變量。選用定平臺半徑r作為優化變量,r的優化范圍為
600 mm≤r≤1000 mm
4.2 優化目標
新型碟式太陽能聚光器的原型機構為通用3-RPS并聯機構,其結構參數設計為單變量。多目標優化設計,最終確定的結構參數無法使3個性能指標均達到最優,只能結合機構的結構布局、構件協調關系、實際需求等綜合選取各性能指標的較優值。多目標優化的策略方法有線性加權法、最小二乘法等,本文采用線性加權法重新構造新的優化目標函數將多目標優化問題轉變為單目標優化問題,基于式(20)、式(24)以及式(30)的性能評價指標建立優化目標函數:
maxΦ(x)=w1GCI+w2GS+w3GL
(31)
式中,w1、w2、w3為各性能指標的權重系數,w1+w2+w3=1。
對于新型碟式太陽能聚光器,由于聚光器鏡面單元作為3-RPS并聯跟蹤機構安裝的末端執行器,其動平臺安裝于鏡面單元的相切基準平面上,3-RPS并聯跟蹤機構的靈巧度關系著鏡面單元的控制精度,從而影響新型碟式太陽能聚光器的跟蹤精度,因此在新型碟式太陽能聚光器的優化設計中,機構的靈巧度作為主要的優化目標。根據新型碟式太陽能聚光器的靈巧度、剛度、承載能力的實際需求,最終綜合考慮各性能指標,設各目標加權系數分別為:w1=0.4,w2=0.3,w3=0.3。
4.3 約束條件
新型碟式太陽能聚光器的運動主要受支鏈運動行程、轉動副轉角范圍以及球副轉角范圍的約束,即
(32)
式中,Lmin、Lmax分別為支鏈的最小和最大極限長度,Lmax=2Lmin,支鏈的最小極限長度為2000 mm;ζRmax為轉動副的最大轉角,為120°;ζSmax為球副的最大轉角。
合理選擇球副能夠使新型碟式太陽能聚光器獲得更大的工作空間,文獻[25]提出了一種大工作空間的新型被動球鉸鏈,本文加以改良作為RPS支鏈的球鉸鏈,如圖7所示,其輸出桿的極限位置如圖8所示。由于雙耳支架的干涉限制,新型被動球鉸鏈輸出桿的擺動空間為以球頭中心為圓心的圓錐體,故根據幾何關系得到新型被動球鉸的最大轉角
(33)
式中,H為雙耳支架的銷孔中心到雙耳支架上表面的距離;Ru為U型撥叉的半徑;Rp為輸出桿的半徑。

圖7 新型被動球鉸鏈Fig.7 New passive spherical hinge
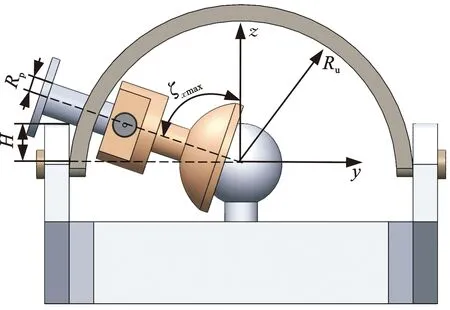
圖8 新型被動球鉸鏈的極限位置Fig.8 Limit position of the new passive spherical hinge
本文中新型被動球鉸的結構參數為:H=70 mm、Rp=35 mm、Ru=200 mm,求得最大轉角經圓整后為60°。
4.4 優化模型求解
基于多目標遺傳算法對新型碟式太陽能聚光器的結構參數進行優化,其中遺傳算法的運行參數設置為:動平臺半徑R=1425 mm,α=100°,β=260°,種群中的個體數目M=100,最大迭代次數Q=100,變量二進制位數E=20,代溝T=0.9,變異概率Pm=0.2,交叉概率Px=0.8。
運算過程中,首先優化模型通過隨機抽樣法選擇初始個體種群,然后,對每一個個體進行函數Φ(x)的求解,步驟如下:
(1)判斷優化模型產生的個體r1,r2,…,rn是否滿足約束條件。若不滿足,則是不可行解,此時F(x)=0,并結束此個體種群在程序中的計算,并進行下一個體代表的種群數據的計算。
(2)在計算函數Φ(x)時,需要計算機構的可達工作空間。首先根據球坐標搜索法,判斷3-RPS并聯機構動平臺中心點C在給定位姿處對應的各運動副(移動副、轉動副以及球副)是否在運動范圍內,若在運動范圍內,則動平臺在可達工作空間內,然后計算給定位姿處的Φ(x)值。
(3)重復步驟(2)直到完成整個可達工作空間的搜索,搜索出滿足約束條件的點的集合w,進一步計算函數Φ(x)的值。
(4)終止約束條件的判斷。對一代個體的函數F(x)值計算完畢后進行終止判斷,若滿足要求,則終止運算,得到較優解;若未找到優化模型的較優解,則繼續進行下一步計算。
(5)重復步驟(2)、(3)的運算,對個體進行交叉、變異獲得下一代個體種群。
機構參數優化迭代過程中目標函數值Φ(x)的變化情況及迭代代數為100時各種群個體對應的目標函數值Φ(x)分別如圖9和圖10所示。
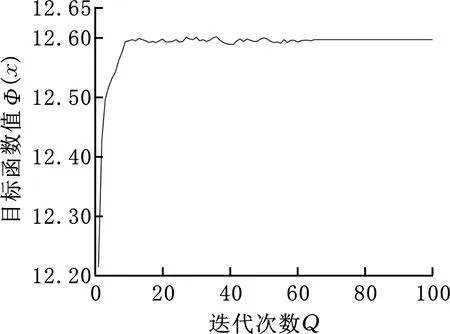
圖9 迭代過程中目標函數值的變化情況Fig.9 Variation of the objective function value during the iteration
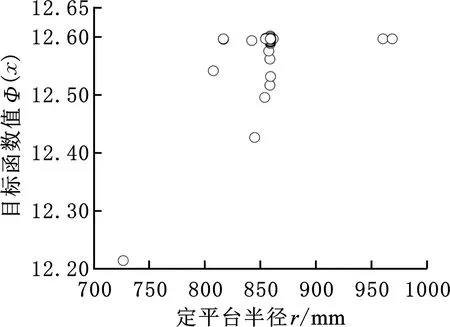
圖10 迭代次數為100時各種群個體對應的目標函數值Fig.10 Objective function corresponding to each groups of individuals with 100 iterations
由圖9可知,當迭代次數達到12時,目標函數值在12.58附近波動,說明此遺傳算法迭代至第12代時即可達到收斂,此時對應的定平臺半徑r為新型碟式太陽能聚光器的定平臺最優參數。由圖10可知,當迭代次數為100時,僅2個種群個體偏離目標函數值較遠,其余的種群個體均在可接受的范圍內,此現象說明此遺傳算法的精度較高。
4.5 優化結果分析
新型碟式太陽能聚光器經過遺傳算法優化后,得到優化后的定平臺半徑大小,通過圓整處理后,取定平臺半徑r=860 mm。優化前后新型碟式太陽能跟蹤裝置的尺寸參數及各性能指標對比如表1所示,通過比較可以得出優化后新型碟式太陽能聚光器的全域靈巧度提高了24.9%,全域剛能性能指標提高了16.7%,全域承載能力指標提高了25.2%。

表1 優化前后各性能指標對比
基于優化前后的定平臺半徑的尺寸參數,當動平臺處于安裝高度ZC=(Lmax+Lmin)/2即ZC=3000 mm時,優化前后各性能指標分布對比如圖11~圖13所示,可以看出優化前后機構各性能指標明顯得到提高。
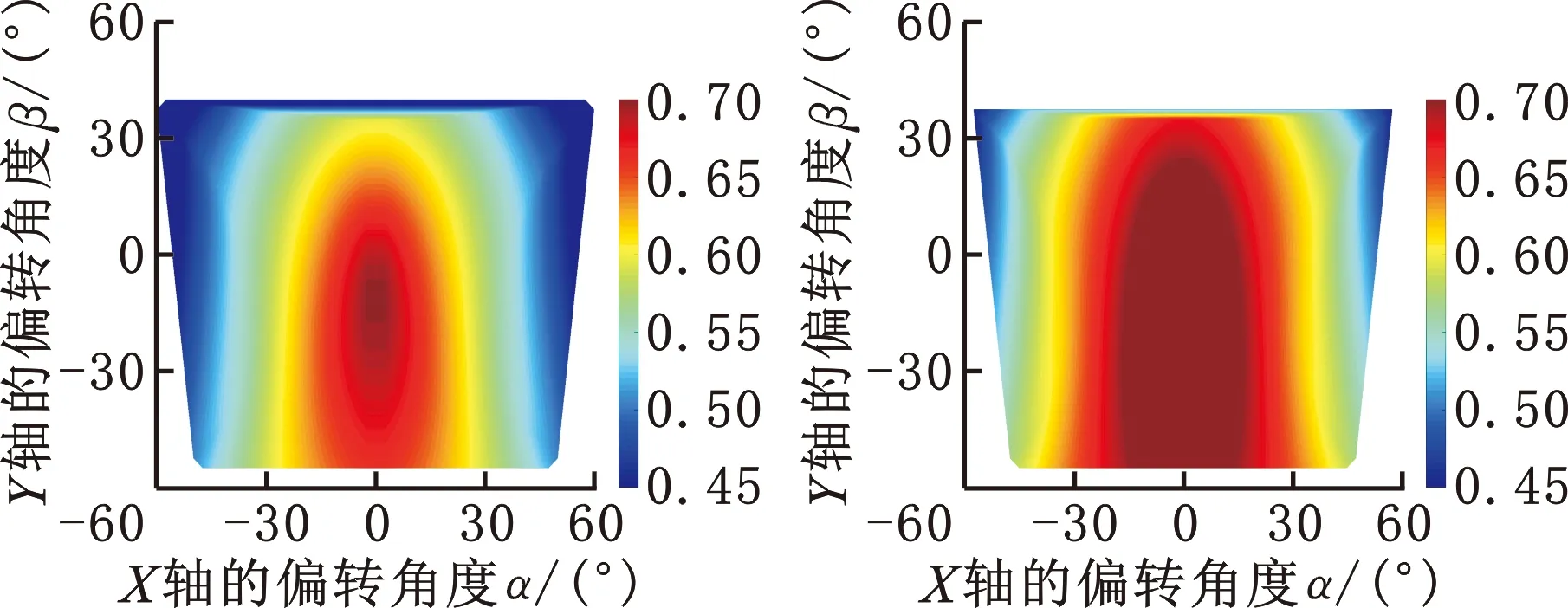
(a)優化前LCI性能圖譜 (b)優化后LCI性能圖譜圖11 優化前后LCI性能分布對比Fig.11 Comparison of LCIperformance distribution before and after optimization

(a)優化前S性能圖譜 (b)優化后S性能圖譜圖12 優化前后S性能分布對比Fig.12 Comparison of S performance distribution before and after optimization
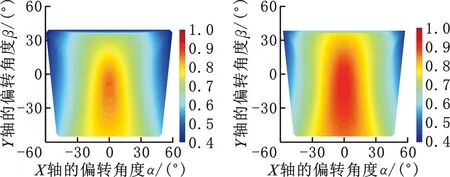
(e)優化前‖Nmin‖性能圖譜 (f)優化后‖Nmin‖性能圖譜圖13 優化前后‖Nmin‖性能分布對比Fig.13 Comparison of‖Nmin‖performance distribution before and after optimization
5 ANSYS有限元仿真驗證
為驗證機構參數優化的正確性,本文采用ANSYS Workbench軟件建立機構參數優化前后的新型碟式太陽能聚光器受到相同外力/外力矩時的靜應力分析模型,得到動平臺處于相同位姿下的變形量與應力云圖,如圖13所示。
根據圖14分析得出,優化前后的3-RPS并聯跟蹤機構在受到相同外力/外力矩作用時,優化前機構的最大變形量為0.358 mm,最大應力為120.17 MPa,優化后機構的最大變形量為0.235 mm,最大應力為98.929 MPa。優化后的機構的剛度和承載能力明顯高于優化前,因此優化后的3-RPS并聯跟蹤機構的剛度和承載能力得到了提高,驗證了本文機構參數優化的正確性。
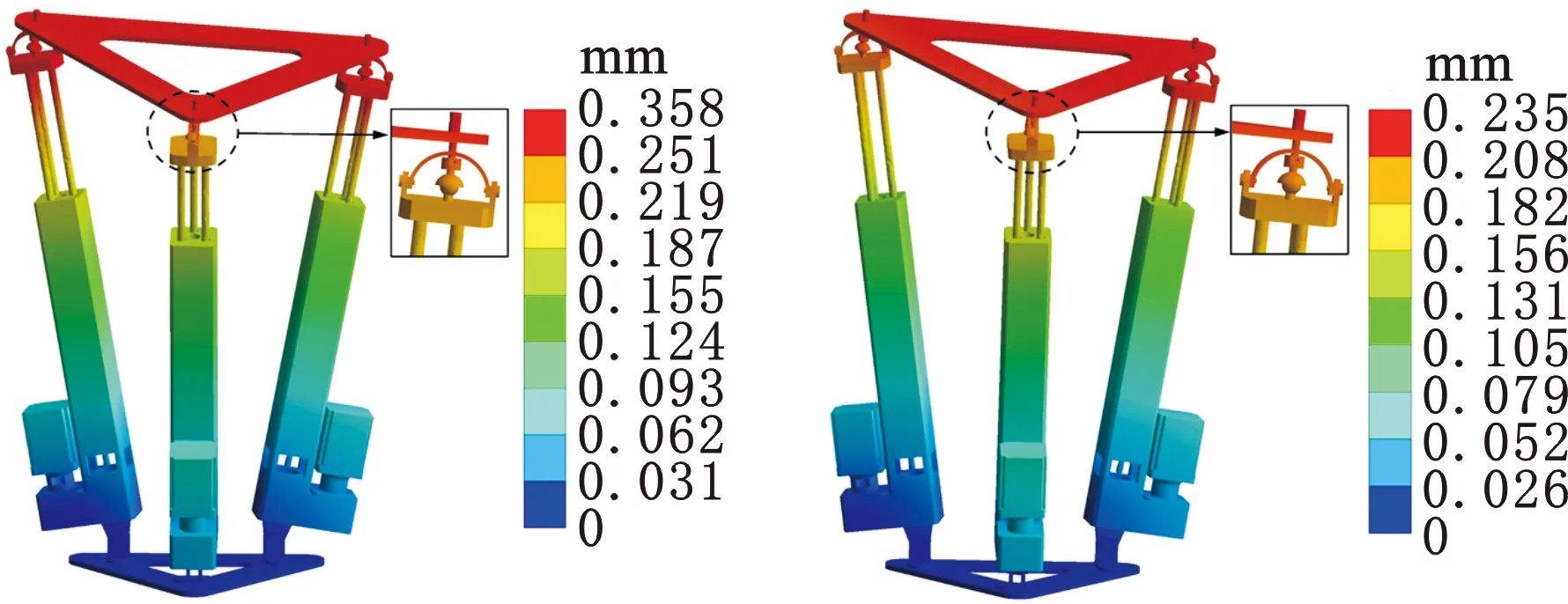
(a)優化前變形量云圖 (b)優化后變形量云圖
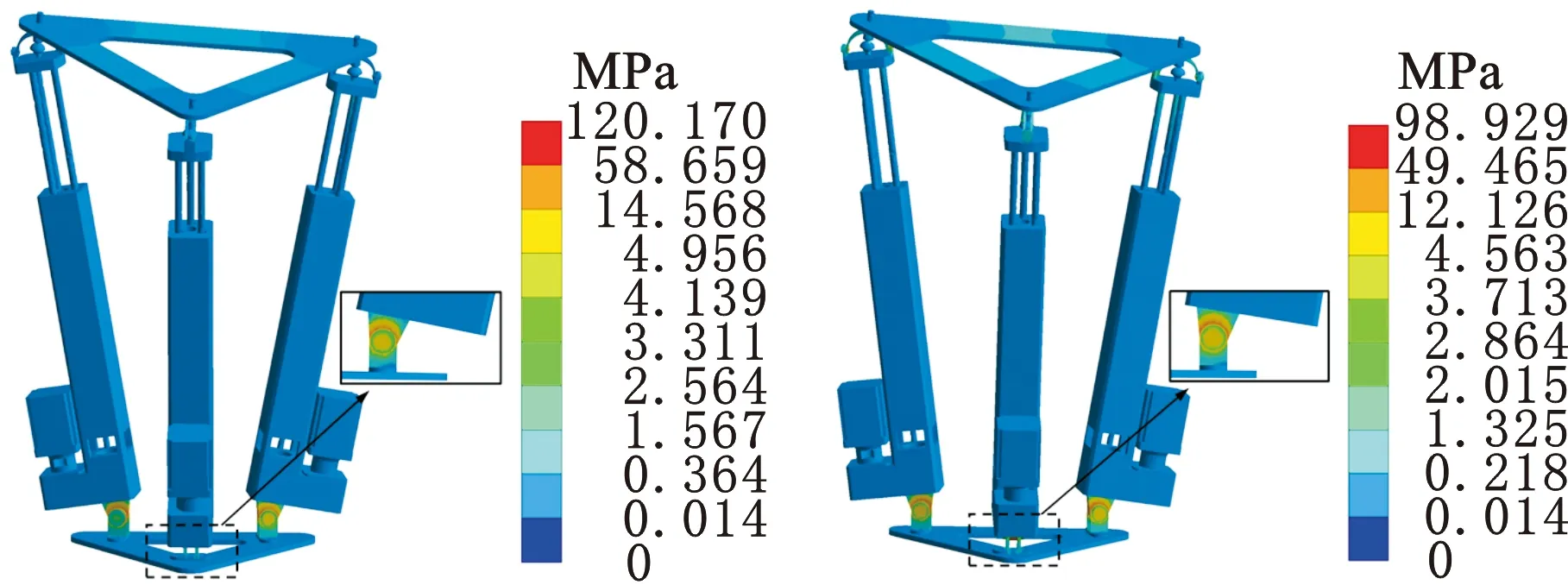
(c)優化前應力云圖 (d)優化后應力云圖圖14 優化前后機構變形量及應力云圖Fig.14 Deformation and stress cloud of the mechanism before and after optimization
6 結論
(1)本文提出了一種通用3-RPS并聯機構,并基于該機構設計了一種新型碟式太陽能聚光器,能夠實現太陽的跟蹤運動,且結構緊湊易安裝,適用于太陽能發電領域。
(2)在描述了通用3-RPS并聯機構的組成和特點的基礎上,求解出了其位置逆解和雅可比矩陣,并進行了仿真驗證。
(3)基于靈巧度、剛度性能以及承載能力指標,對跟蹤平臺進行機構參數優化,確定在定平臺半徑為860 mm時跟蹤平臺綜合性能較優。優化后跟蹤平臺的GCI、GS和GL分別增大了24.9%、16.7%和25.2%,通過有限元法驗證了機構參數優化的正確性。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45