基于不同量測數據融合的配電網狀態估計研究
2023-03-10 05:11:46王海波吳升濤周文海翟文化蔡浩宇
機電信息 2023年4期
王海波 吳升濤 周文海 翟文化 蔡浩宇
(國網嘉興供電公司,浙江嘉興 314000)
0 引言
狀態估計算法主要通過增加數據的冗余度來提高狀態估計的準確度,因此,狀態估計也被稱為濾波[1]。傳統的狀態估計主要用于輸電網,而在配電網中應用相對較少,直到最近幾年,配電網的狀態估計才受到研究人員的廣泛關注。但是,配電網不同于輸電網絡,有其自身的特點,如三相不對稱。因此,輸電系統的狀態估計并不適用于配電網[2],有必要對配電系統的狀態估計進行有針對性的研究。
隨著配電自動化技術的發展,配電網的測量設備逐漸增多。在傳統的SCADA 測量系統的基礎上,PMU也被應用于配電網,且數據精度越來越高。文獻[3]提出了一種基于高精度PMU 測量數據的配電網系統狀態估計方法,但文章并沒有具體說明該方法構建的細節。文獻[4]重點介紹了高精度PMU 數據對狀態估計的作用,分析了極坐標系和直角坐標系下狀態估計的優缺點,結果表明,PMU 數據提高了配電網狀態估計的準確性。一般來說,最好選擇直角坐標系進行求解。文獻[5]認為,未來配電網中會有PMU 測量系統,利用該高精度系統數據優化方案后,可使狀態變量的誤差變得更小,從而達到提高估計精度的目的。然而,這樣在配電網中就會存在兩種不同體系的數據。一般情況下,SCADA 數據精度不夠,沒有時間標記,數據刷新頻率低;PMU 數據精度高,而且數據刷新頻率也較高,但配電網安裝數量較少。如果不進行處理,配電網狀態估計的效果將大大降低,但目前這方面的研究還相對較少。
文獻[6]考慮了不同測量設備傳輸過程中時間斷面不一致的問題,因此使用時延誤差來補償由通信時延引起的誤差,解決了由時間斷面不一致引起的問題,最終也提高了狀態估計的精度。文獻[7]中采用曲線擬合的方法彌補了測量系統數據刷新頻率低的問題,但數據精度有待提高。文獻[8]主要考慮了PMU 數據對狀態估計精度的影響,但沒有提到不同系統之間的數據差異。文獻[9]考慮了PMU 數據和SCADA 數據的融合,采用了混合狀態估計算法,但對于時間斷面不一致的問題,沒有提出有效的解決方案。
基于上述研究,本文首先分析了SCADA 和PMU 數據的不同特點;然后根據它們之間的具體差異,從數據精度、時間斷面、數據刷新頻率三個方面給出了相應的解決方案;最后,基于配電網三相線路模型,主要考慮數據融合的問題,采用支路電流法估計配電網狀態。
1 SCADA 數據與μPMU 數據特性分析
在這里說明一下,在配電網中所配置的PMU 一般被稱為μPMU,基本原理與PMU 相同,所以后續本文將以μPMU 進行敘述[10]。下面將對SCADA 數據[11]與μPMU數據[12]的不同特性進行分析。
SCADA 數據主要包括三相電壓幅值、三相電流幅值與三相功率數據,上傳數據的頻率在秒級水平,數據精度較高,但是沒有時間標記。μPMU 數據主要包括三相電壓與電流相量數據,數據精度比SCADA 數據高,上傳數據的頻率在毫秒級水平,且有時間標記。由此可以看出,兩種量測數據之間存在很大的不同,在進行狀態估計時,需要對這些數據進行相應的處理,從而更好地適應配電網狀態估計的需要。
2 兩種系統數據融合分析
2.1 數據精度融合方法分析
眾所周知,SCADA 系統數據的準確性要低于μPMU系統的數據,因此在混合有兩種不同體系數據的配電網系統中進行狀態估計時,“權重系數法”是使用最廣泛的方法,即根據不同系統的數據分布誤差,將誤差方差的倒數作為該系統數據的權重,在此不再贅述[13]。
2.2 時間斷面數據融合方法分析
在進行某一時刻的系統狀態估計時,需要輸入該時刻的量測數據,包括SCADA 系統的測量數據和μPMU系統的測量數據。但前者的測量數據沒有被打上時間戳,所以就無法獲得SCADA 數據的準確時間,那么狀態估計結果的精度僅僅依靠帶有時標的μPMU 系統數據將會大打折扣。
針對上述情況,本文將以毫秒級水平上傳數據的μPMU 系統的實際上傳頻率為參考,假定為10個毫秒,即10 ms上傳一次數據。通過分析,筆者認為在如此短的時間區間內,且電力系統處于正常運行狀態下,上傳的數據發生異變的概率非常低。
在計算機技術中存在一種緩沖區的概念,即在計算機中由于存在高速傳輸組件及低速傳輸組件,這兩種組件的數據傳輸速率不一致,所以計算機中往往會設置一個用于臨時存儲高速數據的空間,這就是所謂的緩沖區。
基于上述分析,考慮到要為SCADA 測量數據打上時標,并且在同一時間斷面上要保證既有μPMU 測量數據,也有SCADA 測量數據。據此,本文引入了所謂“時間緩沖區”的概念,來為SCADA 數據打上時標。具體做法是,以10 ms上傳一次數據的μPMU 數據作為參考,將其數據上傳時刻作為起點,10 ms為一個時間間隔,即緩沖區。在這個緩沖區內出現SCADA 上傳數據,就將其打上μPMU 數據的時標,同時也保證了兩者的數據在一個時間斷面上。
如圖1所示,SCADA 數據在μPMU 數據所設置的10~20 ms的緩沖區間內出現,根據前述分析,在緩沖區內可以認為數據沒有變化。那么,在μPMU 上傳時刻的SCADA 數據與緩沖區真實上傳的SCADA 數據基本一致,所以認為上傳的SCADA 數據上傳時間在10 ms處。
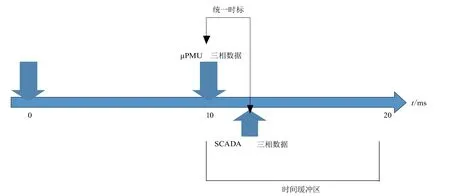
圖1 添加SCADA 三相數據時標并保持時間斷面一致的方法
2.3 數據刷新頻率融合方法分析
考慮到兩種系統的數據上傳頻率存在差異,上傳頻率為秒級別的SCADA 數據和上傳頻率為毫秒級別的μPMU 數據,在一個時間段內,可以明顯看出兩者上傳的數據在數量上的差異。即在SCADA 數據兩次上傳的時間區間內,μPMU 數據已經大量上傳到系統內。但單靠這些數據又無法進行狀態估計,這就造成了巨大的數據浪費,致使系統調度人員不能更精準地掌握系統狀態信息。
如圖2所示,2 s上傳速率的SCADA 系統數據與10 ms上傳速率的μPMU 數據,存在巨大的數量差異。
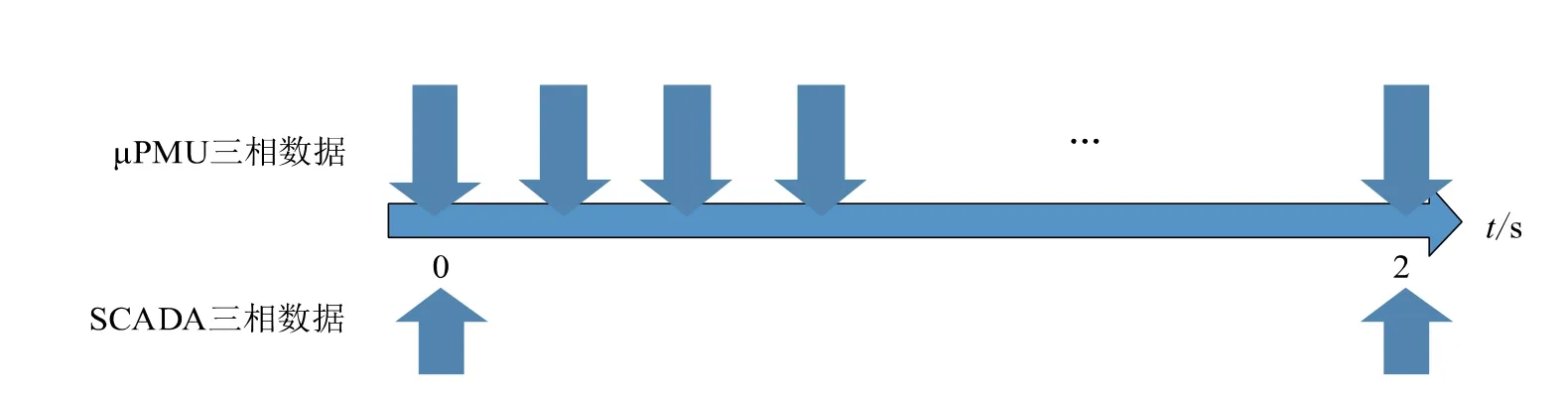
圖2 SCADA 數據與μPMU 數據上傳速率差異
基于上述分析,電力系統運行在正常工況下,且負荷也處于穩定變化的情況下,如相關負荷數據處在秒級別的時間區間內,在此條件下,本文認為數據特性應當是穩定且線性變化的,比如在2 s的時間間隔內。所以,可以利用線性變化規律來處理數據上傳頻率不一致的問題。
本文分析認為目前解決線性問題的主要方法有拉格朗日低次線性插值算法,簡稱插值方法,在此將其應用于狀態估計數據頻率融合中。該插值方法主要對數據進行擬合,以獲取數據的變化規律。通常做法是對數據進行分段線性擬合,即把數據點按某一規律劃分成一個個小區間,以區間為單位進行擬合,這樣會得到較高的擬合精度。
一般情況下,內插方法和外插方法是該算法的兩個主要方向,但這兩個方向的應用場景有所不同。對區間外部數據進行分析擬合一般用外插算法,對區間內部數據進行分析擬合一般用內插算法。本文將根據這些特點,綜合利用這兩種方法,分析改善狀態估計效果的方法。
2.3.1 頻率融合的內插方法
如圖3所示,為了獲取較好的插值效果,當插值區間T2變為插值區間T1時,可以看到X1明顯比X2更加靠近X。因此,較小的插值區間帶來的是更好的擬合效果。
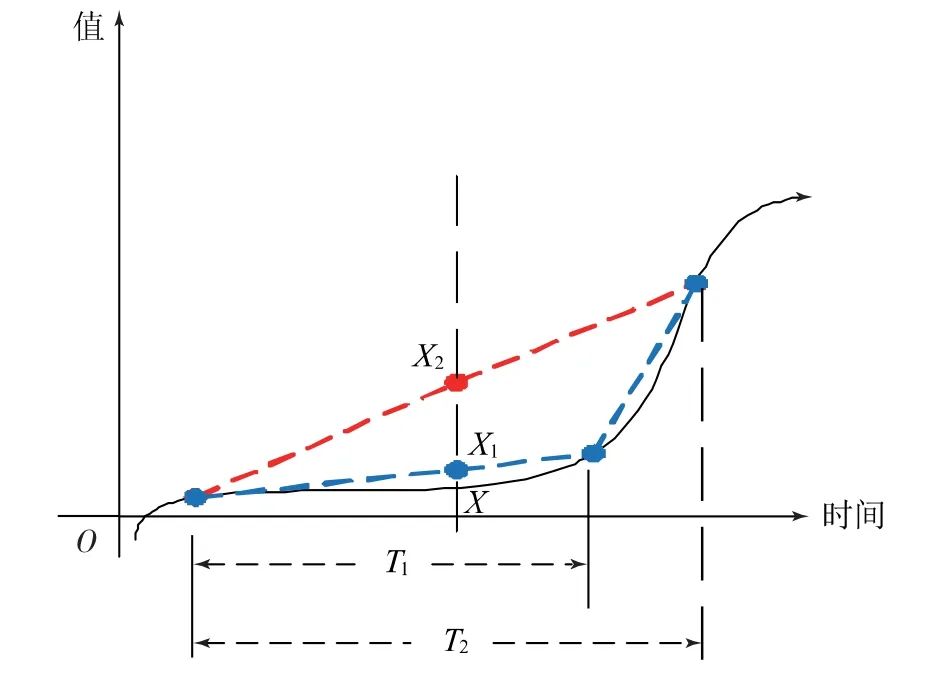
圖3 內插法分析示例
在本文實際分析中,2 s是SCADA 數據的最小上傳速率,那么就將SCADA 數據的插值區間設置為2 s。具體的SCADA 數據插值公式如式(1)所示:
式中:φ為相序號;Tinsert為目標插值時間點;Tzone1為插值區間的首端時間點;Tzone2為插值區間的末端時間點,且Tzone1<Tinsert<Tzone2;M為在上述相關腳標下的值。
2.3.2 頻率融合的外插方法
通過分析發現,對當前時間斷面或者未來時間斷面進行狀態估計,內插法可能無法彌補前述時間斷面缺失的SCADA 數據,狀態估計也將無法有效運行。針對此種情況,本文利用外插法進行分析計算,方法如圖4所示,通過插值區間T來獲取未來某一時刻的X值近似的X1值。

圖4 外插法分析示例
基于此,利用外插法來補足該場景下所缺少的SCADA 測量數據,進而解決刷新頻率融合問題。具體的SCADA 數據插值公式如式(2)所示:
式中:Tinsertzone1為插值區間的首端時間點;Tinsertzone2為插值區間的末端時間點,且Tinsertzone1<Tinsertzone2<Tinsert;M為在上述相關腳標下的值。
3 數據融合下的配電網狀態估計分析
加權最小二乘法是本文狀態估計主要方法,狀態變量選用支路電流幅值與相角,從而利用支路電流法構建狀態方程,并進行狀態估計求解計算[14]。
進行配網狀態估計,需要計及三相不對稱。基于此,支路阻抗矩陣如式(3)所示:
式中:Zaa、Zbb、Zcc為線路自阻抗;Zab=Zba,Zca=Zac,Zbc=Zcb為線路互阻抗。
此外,為了加快狀態估計速度,本文簡化了配網三相不對稱模型,即不考慮互阻抗對配網線路的影響,只考慮配網三相自阻抗。基于此,得到簡化后的配網支路阻抗矩陣如式(4)所示:
綜合分析,建立數據融合下的配電網狀態估計方法,其基本流程如下:
步驟1,從SCADA 系統與μPMU 系統讀取數據,并為SCADA 數據添加時標、統一時間斷面;
步驟2,若SCADA 系統未上傳數據,則利用插值分析方法填補數據;
步驟3,初始化狀態估計的初值,整理相關網絡參數數據,為狀態估計做準備;
步驟4,利用加權最小二乘法求解狀態變量的迭代值;
步驟5,利用狀態變量迭代值更新狀態量;
步驟6,判斷狀態變量的迭代值是否滿足收斂要求,即迭代值是否小于收斂值且迭代次數k是否小于等于最大迭代次數maxnum,若滿足則輸出狀態量,若不滿足則繼續步驟4,或者得出狀態估計不收斂的結果。
4 算例分析
綜上所述,本文利用IEEE 33節點系統平臺進行仿真算例研究。詳細步驟如下:利用潮流計算方法對仿真系統進行計算,獲取50 s時間內的相關潮流結果。考慮到現實條件,假設μPMU 上傳頻率為1 s(實際為毫秒級),SCADA 數據上傳頻率為10 s(實際為2 s)。隨后,為驗證本文插值方法的有效性,將某一節點設置為SCADA 系統的測量裝置,并將該點50 s潮流結果作為其真實值,最后以10 s為一個時間區間進行仿真插值計算,并分別以外插法和內插法進行驗證,得到的結果如下。
4.1 內插法仿真分析
利用內插法進行插值求解,獲取仿真結果,即全量測值與插值仿真之間的效果。在此對仿真節點的A 相有功負荷進行了分析,分析結果如圖5所示。
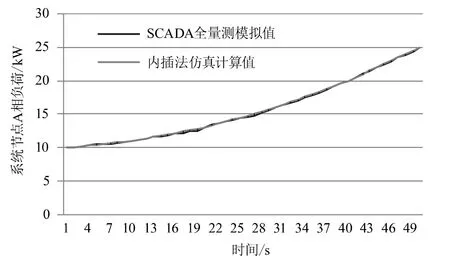
圖5 A 相有功負荷內插分析
4.2 外插法仿真分析
通過外插法同樣進行了上述仿真分析,同樣對相關節點A 相有功負荷進行分析,獲取的仿真結果如圖6所示。
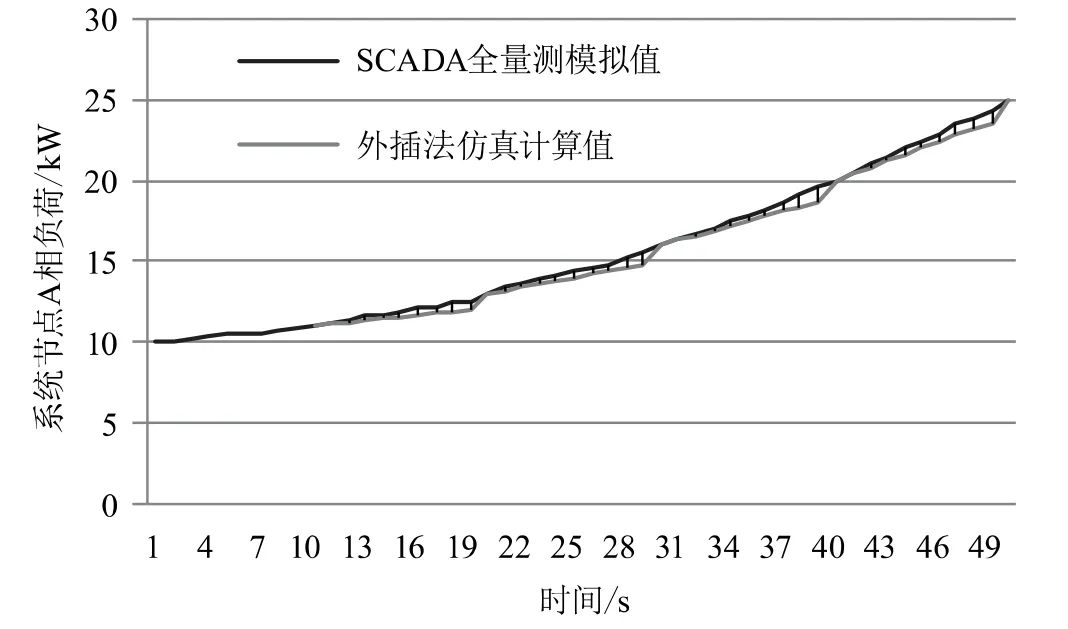
圖6 A 相有功負荷外插分析
4.3 狀態估計仿真分析
從上述結果可以看出,內插法的精度要高于外插法,所以本文利用內插法所得數據進行狀態估計計算。
在IEEE 33節點系統中,節點4、6、8、12、17、19、23配置μPMU 量測系統,其余節點配置SCADA 量測系統。其中μPMU 的測量量添加標準差為0.1% 的正態分布誤差,SCADA 的測量量添加標準差為1% 的正態分布誤差。結果如圖7所示,可見狀態估計具有較高精度。
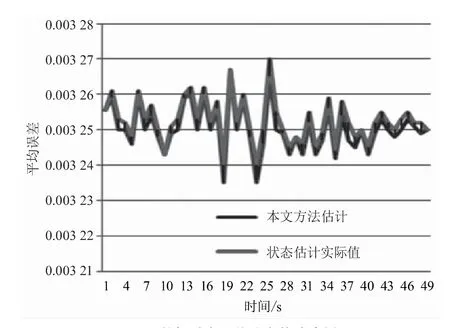
圖7 數據融合下的狀態估計分析
5 結語
通過對上述兩種插值效果進行分析可以發現,內插法要明顯優于外插法。此外,通過量化計算可以得知,內插法計算得到的有功負荷的平均誤差為0.5%,而利用外插法計算得到的有功負荷的平均誤差為2% 。據此分析,外插法在精度方面要劣于內插法。本文通過研究認為,這主要是由于內插法分析對象是在已知的趨勢基礎上進行的,而外插法則基于數據的未知趨勢來進行分析計算。但正因如此,內插法和外插法各有優劣,從而本文認為可以將它們結合起來進行運用,即在進行狀態估計時,首先利用外插法進行當前或未來時間斷面的計算,然后利用高精度的內插法對外插法的結果進行修正、循環計算,就可以提高相關數據的精度,而且狀態估計值也可以得到計算與改善。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
北京測繪(2020年12期)2020-12-29 01:33:58
經濟技術協作信息(2018年32期)2018-11-30 01:43:16
電子制作(2018年18期)2018-11-14 01:48:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
山東工業技術(2016年15期)2016-12-01 05:31:22
電測與儀表(2016年5期)2016-04-22 01:14:14
河南電力(2016年5期)2016-02-06 02:11:24