基于車載點云數據的道路交通指示標志檢測方法
2023-03-09 06:56:38鄒亞洲
北京測繪 2023年8期
方 猛 鄒亞洲
(浙江省測繪科學技術研究院,浙江 杭州 310030)
0 引言
移動車載激光掃描技術是一種能夠在短時間內采集海量空間三維點云數據的新型測繪技術,具有全天候、高速度、高密度等顯著特征,為面向智能化的城市空間地物信息提取提供了一種嶄新的技術手段[1-2]。作為城市道路場景中的重要組成部分,交通指示標志內包含著道路場景中重要的指示信息[3],用于為駕駛員提供當前環境內行駛方向與駕駛行為等關鍵信息。交通指示標志在提升交通道路運行效率與運行安全起著至關重要的作用[4-6]。交通指示標志顏色較為固定,幾何形狀較為簡單,易于駕駛人員分辨。但受光照與天氣等因素影響,導致交通指示標志檢測難度較大[7]。為降低道路交通安全事故的發生概率,需研究高效精度的交通指示標志檢測方法,為駕駛人員提供精準的交通指示信息,避免安全事故發生。例如,尉天成等[8]通過先驗知識,確定交通標志檢測的目標候選框,降低候選框的冗余性,利用多尺度卷積神經網絡,處理目標候選框,得到交通標志檢測結果。該方法可有效識別小目標的交通標志。趙樹恩等[9]通過直方圖均衡法,預處理道路交通圖像,利用輪廓檢測方法,定位預處理圖像內的交通標志,將定位結果輸入深度卷積對抗神經網絡內,輸出交通標志檢測結果。該方法的檢測精度高達94.12%。但這兩種方法在復雜場景下,均存在較大的局限性,且檢測結果易受天氣與光照等影響,檢測穩定性較低。車載點云數據是在車輛上搭載車載移動測量系統,采集代表物體表面三維空間坐標信息的激光點云[10-11],因此不受天氣與光照條件影響,具備較高的信息精度。為此,本文研究基于車載點云數據的道路交通指示標志檢測方法,充分發揮車載點云數據的高精度幾何特征與強度特征,實現道路交通指示標志精準檢測,為智能化測繪的實際應用、道路高效管理與智能駕駛等領域提供一種新的數據獲取路徑。
1 道路交通指示標志檢測方法
1.1 道路交通環境車載點云數據采集
利用車載激光掃描系統,采集道路交通環境車載點云數據,該系統的結構如圖1所示。
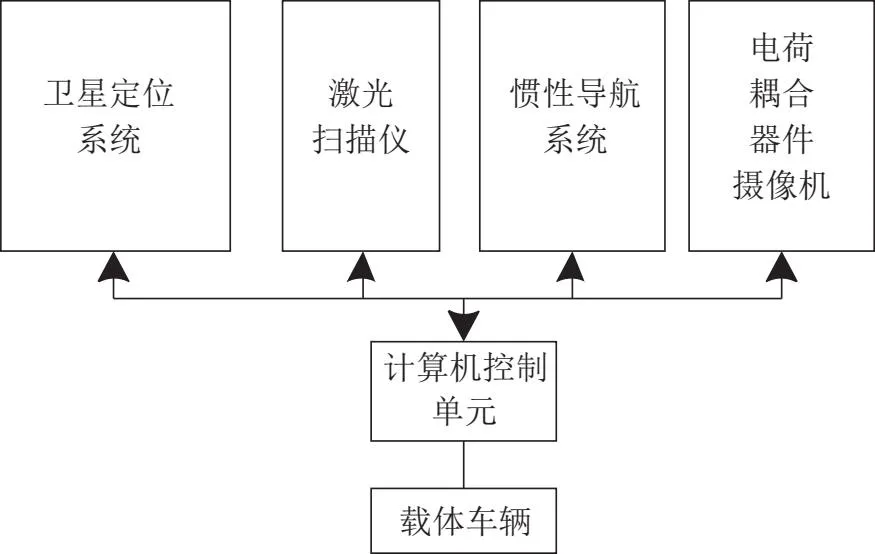
圖1 車載激光掃描系統結構圖
該系統利用激光掃描儀(laser scanner,LS)測量道路環境的空間信息;通過電荷耦合器件(charge coupled device,CCD)攝像機掃描道路環境區域,得到影像數據;采用全球定位系統(global positioning system,GPS)與慣性導航系統(inertial navigation system,INS)得到掃描點的三維空間坐標信息[12]。采集的全部信息均傳輸至計算機控制單元,利用計算機控制單元對采集的信息進行預處理,獲取道路交通環境的車載點云數據。
令當下車載激光掃描系統的掃描點是V;V的坐標是V(X,Y,Z);GPS獲取的車輛坐標是(XG,YG,ZG);INS獲取的LS與大地坐標軸中經度、維度、高度間的夾角是(θy,θp,θr);被掃描的道路交通環境與車載激光掃描系統的相對坐標是(Xl,Yl,Zl);LS與道路交通環境間距離是D;LS的視線角度是γ,高低角度是H;V(X,Y,Z)的計算公式如下[13-14]:
(1)
(Xl,Yl,Zl)的計算公式如下:
(2)

1.2 道路交通指示標志與其余地物車載點云數據分類
首先,按照車載激光掃描系統、存儲的掃描點發射角度構造雙向掃描線索引;其次,通過移動動態窗口分類法,分類道路交通指示標志與其余地物車載點云數據。


(θn+1-θn)>Δθ
(3)
其中,鄰近掃描點的角度值是θn+1、θn。
步驟2,按照LS的安裝位置,確定θ,將其當成角度分割點。由于該點可能是噪聲點,需按照LS至道路交通環境間的距離D,分析該點是否是道路交通指示標志點,若是噪聲點,則繼續分析其鄰近點[18],以全部道路交通指示標志點完成搜索為止。利用角度分割點,將各條掃描線分開,構造雙向掃描線索引。
利用移動動態窗口分類算法,結合雙向掃描線索引,分類處理道路交通指示標志與其余地物車載點云數據,具體步驟如下:

步驟2,按照目標點集窗口內點集的幾何特征因子,分析點集類型,即道路交通指示標志點或其余地物點。
步驟3,依據雙向掃描線索引,以角度分割點為起點,對移動動態窗口展開分類,以找到全部道路交通指示標志點為止,完成道路交通指示標志與其余地物車載點云數據分類。
1.3 道路交通指示標志邊緣信息提取
在1.2小節提取的道路交通指示標志車載點云數據V′內,利用Canny邊緣檢測算法[21-22]提取邊緣信息,步驟如下:
步驟1,通過高斯平滑濾波器平滑處理V′,公式為
(4)
其中,高斯函數寬度是σ;卷積操作是*;平滑處理后的交通指示標志車載點云數據是I;交通指示標志車載點云數據的像素坐標是(x,y)。
步驟2,求解I的梯度幅值M與方向τ,公式為
(5)
其中,I在橫縱方向上的偏導數是ρ、Q。
步驟3,濾波去噪,隨機選擇一個梯度方向τ,卷積處理該方向上的道路交通指示標志車載點云數據的二維高斯函數,完成濾波去噪。
步驟4,在濾波去噪后的道路交通指示標志車載點云數據內,找到最大梯度幅值Mmax,利用Mmax尋找道路交通指示標志車載點云數據的邊緣,完成邊緣信息提取。
1.4 交通指示標志檢測的實現
利用雙線性卷積神經網絡(bilinear convolutional neural network,BCNN),在1.3小節提取的道路交通指示標志邊緣信息內,提取道路交通指示標志特征,將其作為訓練樣本,輸入支持向量機內,輸出道路交通指示標志檢測結果。
BCNN模型B的結構由四元組建立而成B=(fα,fβ,O,C),其中,交通指示標志特征函數是fα、fβ;池化函數是O;檢測函數是C。利用O池化處理fα與fβ,通過將池化后的fα與fβ映射至樣本標記空間。
(6)


(7)
(8)
道路交通指示標志檢測具體步驟如下:
步驟1,利用車載激光掃描系統,采集道路交通環境車載點云數據。
步驟2,通過移動動態窗口分類算法,在采集的車載點云數據內,分類處理道路交通指示標志與其余地物車載點云數據。
步驟3,采用Canny邊緣檢測算法,在道路交通指示標志車載點云數據內,提取道路交通指示標志邊緣信息。
步驟4,構造道路交通指示標志特征提取函數fα、fβ。

步驟7,BCNN模型通過步驟4與步驟6,完成交通指示標志特征提取,將其當成訓練樣本,訓練支持向量機,通過訓練完成的支持向量機處理測試樣本,輸出道路交通指示標志檢測結果。
2 實驗分析
以某城市的某條道路為實驗對象,該條道路的長度大概是17.59 km,整體地勢起伏較小,道路等級為Ⅱ級標準,使用年限是12 a,載荷標準是BZZ-100,交通等級是中輕交通。該道路中機動車道與非機動車道各兩條,前者寬度是15 m左右,后者寬度是3 m左右。該條道路上共有6個交通指示標志,分別是最低限速、干路先行、人行橫道、分向行駛車道、機動車車道與非機動車車道。
本文方法利用Rigel-VMX45車載激光掃描系統,采集該道路的車載激光點云數據,部分道路環境車載激光點云數據采集結果如圖2所示。

圖2 部分道路環境車載激光點云數據采集結果
根據圖2可知,本文方法可有效采集道路交通環境車載激光點云數據,采集結果中可清晰呈現道路、地物與交通指示標志信息,為后續交通指示標志檢測提供有力的數據支持。實驗證明:本文方法具備道路交通環境車載激光點云數據采集的可行性。
利用本文方法對采集的道路交通環境車載激光點云數據進行分類,獲取道路交通指示標志車載點云數據,如圖3所示。
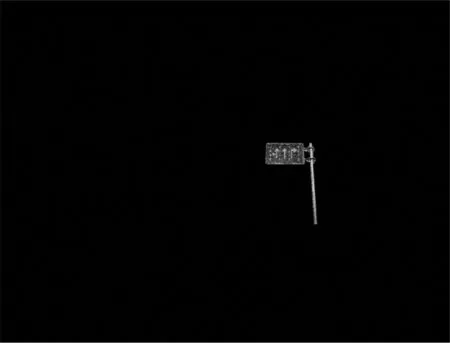
圖3 交通指示標志車載點云數據
由圖3可知,本文方法能夠有效得到后續交通指示標志需要用到的交通指示標志車載點云數據。實驗結果表明,本文方法具備交通指示標志車載點云和數據與其余地物車載點云數據分類的有效性。
利用本文方法對分類獲取的交通指示標志車載點云數據進行邊緣信息提取,邊緣信息提取結果如圖4所示。

圖4 交通指示標志邊緣信息提取結果
根據圖4可知,本文方法可在有效交通指示標志車載點云和數據內,提取交通指示標志邊緣信息,本文方法提取的邊緣信息,可清晰描繪交通指示標志的邊緣幾何形狀信息,很好地保留交通指示標志的邊緣信息。實驗結果表明,本文方法具備較優的邊緣信息提取效果。
以完整率與點云貢獻率為評價指標,以文獻[8]中的基于多尺度卷積神經網絡的道路交通標志識別方法為對比方法,衡量本文方法的邊緣信息提取效果,其計算過程如下
(9)
完整率代表邊緣信息提取的完整性,計算提取到的邊緣信息量m′和道路交通環境原本所具有的邊緣信息量m的比值,其值越接近100%,邊緣信息提取的完整性越佳;點云貢獻率代表邊緣信息提取的有效程度,計算提取到的邊緣信息量中的有效信息量m0′與道路交通環境原本所具有的邊緣信息量m的比值,其值越接近1,邊緣信息提取的有效程度越高。分析本文方法和文獻[8]方法在霧天與雨天條件下,提取不同類型交通指示標志邊緣信息時的完整率與點云貢獻率,分析結果如表1所示。
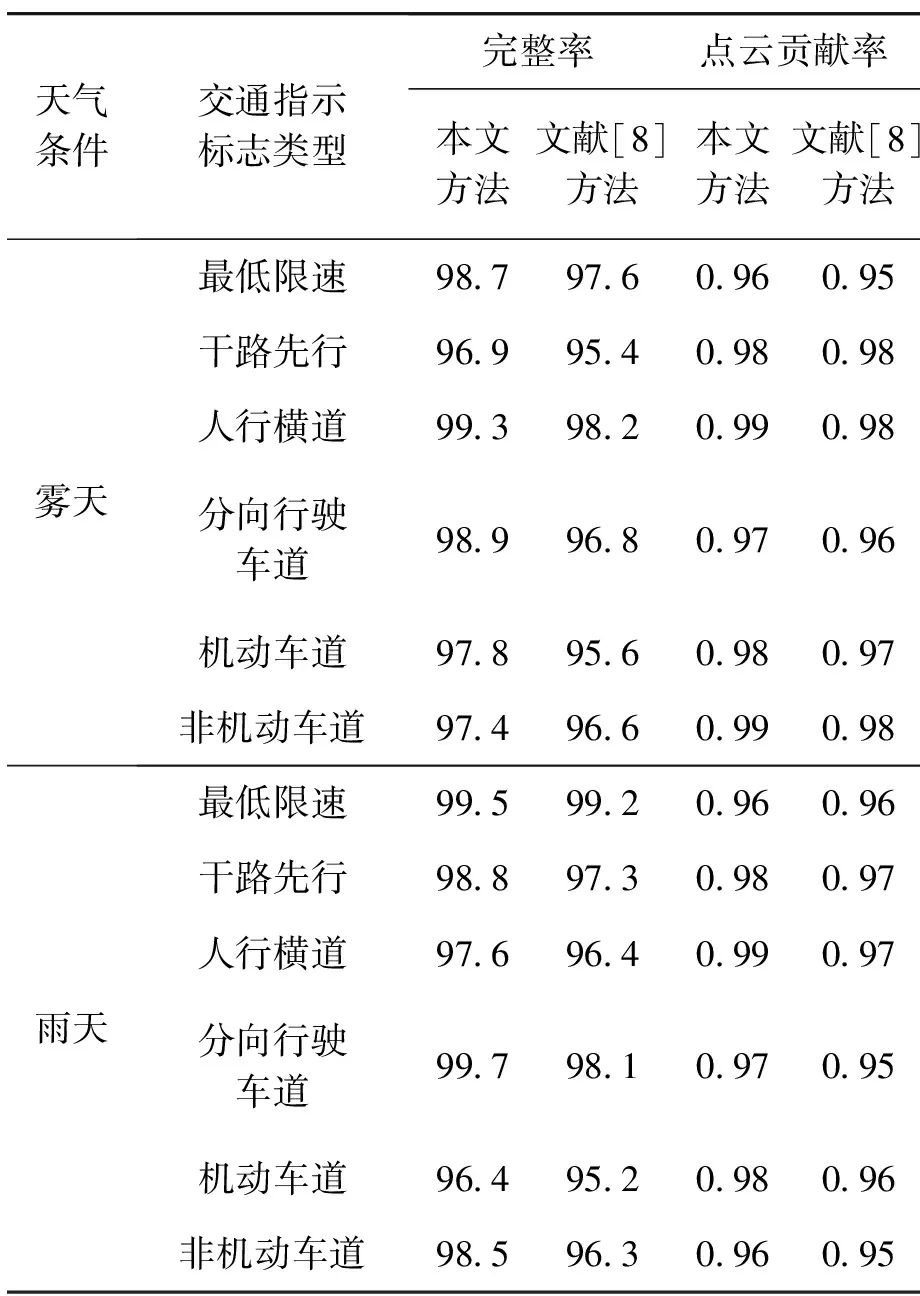
表1 邊緣信息提取的完整率與點云貢獻率分析結果 單位:%
由表1可知,在不同天氣條件下,本文方法提取各類型交通指示標志邊緣信息的完整率均較高,最低完整率為96.4%;點云貢獻率也均與1較為接近,最低點云貢獻率是0.96%。而文獻[8]方法得到的最低完整率為95.2%,點云貢獻率也與1較為接近,但相比本文方法還是較低,最低點云貢獻率是0.95%。說明在不同天氣條件下,不同交通指示標志類型時,本文方法提取邊緣信息的完整率與點云貢獻率均較高,即邊緣信息提取完整性較優,邊緣信息提取的有效程度較高。
利用本文方法根據提取的交通指示標志邊緣信息,進行交通指示標志檢測,交通指示標志檢測結果如圖5所示。

圖5 交通指示標志檢測結果
根據圖5可知,本文方法可有效檢測交通指示標志,根據檢測結果得知,該部分道路交通環境中的交通指示標志為分向行駛車道,其作用為指示駕駛員前方可分向行駛,駕駛員可根據分向行駛方向,及時變更車道,決定需要行駛的道路,降低安全事故發生概率。
利用一個用來評價二分類模型優劣的常用指標AUC面積衡量本文方法道路交通指示標志的檢測效果,即坐標圖中曲線下與坐標軸圍成的面積,AUC面積與1越接近,說明本文方法的檢測精度越高,在不同光照情況下,本文方法道路交通指示標志檢測的AUC值分析結果如圖6所示。
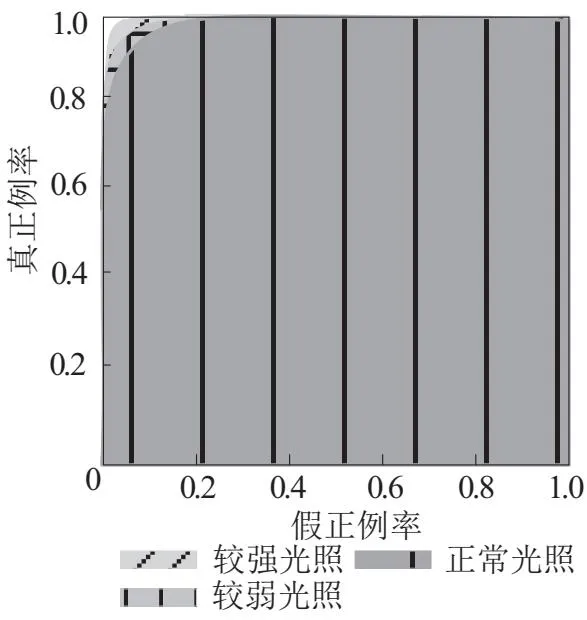
圖6 不同光照條件下的檢測精度分析結果
由圖6可知,在不同光照條件下,本文方法檢測道路交通指示標志的AUC值,均與1較為接近,說明不同光照條件,對本文方法的影響非常小,原因是本文方法利用車載點云數據進行道路交通指示標志檢測,車載點云數據不受光照與天氣等因素影響。實驗證明:在不同光照條件下,本文方法均可精準檢測道路交通指示標志。
3 結束語
隨著政府高效管理與社會經濟發展對地理空間數據越來越高的要求,測繪新技術以智能化測繪等相關概念與實踐不斷發展與成熟。智能化測繪在數據采集內容與信息提取方法上仍然有較大的完善空間,全面反映物理世界的瞬時變化。為進一步探索新型測繪在空間數據采集與地物信息提取中的應用,本文研究并提出了基于車載點云數據的道路交通指示標志檢測方法,依據車載點云數據不受光照與天氣等因素影響的優勢,提升道路交通指示標簽檢測精度,為促進交通指示標志檢測方法在實際生活中廣泛應用提供幫助。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
海峽科技與產業(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
