三維掃描技術(shù)在預(yù)制構(gòu)件質(zhì)量檢查中的應(yīng)用
2023-03-09 07:05:52單意志余世安楊喜云
北京測(cè)繪 2023年8期
關(guān)鍵詞:特征
單意志 余世安 楊喜云
(中國(guó)核工業(yè)華興建設(shè)有限公司,江蘇 南京 210019)
0 引言
大型空間鋼結(jié)構(gòu)承載力強(qiáng),外形美觀,通用性強(qiáng)[1],但其結(jié)構(gòu)復(fù)雜,施工難度大,多用于大型體育場(chǎng)、會(huì)展中心、車站、機(jī)場(chǎng)等公共設(shè)施[2]。鋼結(jié)構(gòu)施工構(gòu)件多,規(guī)格型號(hào)多樣[3],對(duì)預(yù)制構(gòu)件質(zhì)量檢查是保證工程實(shí)體精準(zhǔn)快速完成的關(guān)鍵,在交付安裝前的預(yù)制構(gòu)件檢測(cè)是鋼結(jié)構(gòu)加工車間面臨的一個(gè)突出問題;檢查方法一是采用人工預(yù)拼接來完成檢測(cè),但自動(dòng)化程度較低,人工預(yù)拼接周期長(zhǎng),成本高[4],安全風(fēng)險(xiǎn)較高;二是依靠傳統(tǒng)鋼卷尺、全站儀數(shù)據(jù)檢測(cè),同樣存在周期長(zhǎng)[5]、成本高的問題。為解決這一技術(shù)難題,采用三維掃描技術(shù),其克服了傳統(tǒng)測(cè)量的局限性[6],直接在車間地面上任意位置擺放鋼柱和鋼梁牛腿,在相關(guān)位置放置標(biāo)靶,使用三維掃描儀對(duì)鋼柱和鋼梁牛腿進(jìn)行全方位掃描,掃描數(shù)據(jù)基于標(biāo)靶拼接,然后根據(jù)既定坐標(biāo)進(jìn)行鋼柱和鋼梁牛腿空間拼接。
1 基本原理
三維激光掃描測(cè)量系統(tǒng)主要由三維激光掃描儀模塊、控制器模塊、計(jì)算機(jī)模塊、電源供電系統(tǒng)以及系統(tǒng)配套軟件等構(gòu)成[7];三維激光掃描技術(shù)的基礎(chǔ)是三維激光測(cè)距技術(shù)[8];在車間地面上擺放鋼柱和鋼梁牛腿,在相關(guān)位置放置標(biāo)靶,使用三維掃描儀對(duì)鋼柱和鋼梁牛腿進(jìn)行全方位掃描,得到構(gòu)件的立體位置,提取每一鋼柱、鋼梁的構(gòu)件,通過構(gòu)件特征點(diǎn)及特征點(diǎn)在空間位置的理論坐標(biāo),采用計(jì)算機(jī)輔助設(shè)計(jì)(computer aided design,CAD)匹配拼裝,復(fù)原構(gòu)件的空間拼裝位置,拼接后接頭部位誤差可通過CAD圖量測(cè)得到偏差值,從而達(dá)到構(gòu)件檢查的結(jié)果。
點(diǎn)云配準(zhǔn)的本質(zhì)是將不同測(cè)站掃描得到的點(diǎn)云通過剛性變換轉(zhuǎn)化到同一參考坐標(biāo)系下形成一個(gè)整體。假設(shè)兩測(cè)站點(diǎn)云分別以P和Q表示,點(diǎn)云配準(zhǔn)就是尋找兩待配準(zhǔn)點(diǎn)云之間的剛性變換,即源點(diǎn)云M變換到目標(biāo)點(diǎn)云Q,這個(gè)過程可以用Q=R×P+T來表示,R代表旋轉(zhuǎn)矩陣,T代表平移向量。點(diǎn)云配準(zhǔn)主要可以分為兩大步驟:點(diǎn)云間對(duì)應(yīng)點(diǎn)匹配和剛性變換數(shù)學(xué)模型的解算,工程應(yīng)用中通常采用標(biāo)靶作為兩測(cè)站點(diǎn)云間的對(duì)應(yīng)點(diǎn)將其帶入剛性變換數(shù)學(xué)模型就可以完成點(diǎn)云配準(zhǔn)工作。
確定了待配準(zhǔn)點(diǎn)云間對(duì)應(yīng)點(diǎn)關(guān)系之后,需要建立數(shù)學(xué)模型解算剛性變換對(duì)應(yīng)的旋轉(zhuǎn)矩陣與平移矩陣。建立數(shù)學(xué)模型的方法有很多,常用的剛性變換數(shù)學(xué)解算模型(附有限制條件間接平差解算模型)。
一般來說兩測(cè)站點(diǎn)云間沒有坐標(biāo)系尺度差,不需要考慮尺度因子的問題,兩點(diǎn)云之間只存在旋轉(zhuǎn)、平移變換,此時(shí)轉(zhuǎn)換模型為
(1)
該轉(zhuǎn)換模型包含3個(gè)平移參數(shù)X0、Y0、Z0和3個(gè)角度參數(shù)A、B、C。x、y、z為源點(diǎn)云坐標(biāo)系下坐標(biāo),若按照z軸、y軸、x軸依次旋轉(zhuǎn)對(duì)應(yīng)的三維旋轉(zhuǎn)矩陣可以表示為
R(A,B,C)可用方向余弦表示為
(2)
旋轉(zhuǎn)變換屬于初等正交變換,因此R(A,B,C)為正交矩陣,矩陣中的9個(gè)元素之間滿足下面6個(gè)等式
(3)
附有限制條件間接平差解算模型關(guān)鍵在于精確解算出6個(gè)參數(shù)(X0,Y0,Z0,A,B,C)。其中3個(gè)角度參數(shù)由于是非線性三角函數(shù)關(guān)系,所以轉(zhuǎn)化成9個(gè)方向余弦表示,可以得到線性轉(zhuǎn)換模型,其誤差方程為
(4)
式中,
(5)
(6)
(7)
(8)
由旋轉(zhuǎn)矩陣的9個(gè)方向余弦之間存在非線性關(guān)系,可得6個(gè)限制條件。
(9)
式中,
(10)
(11)
(12)
根據(jù)附有限制條件的間接平差得
(13)
其中,
(14)
式中,Nbb為滿秩系數(shù)陣;P為權(quán)陣;B為列滿秩陣;C為行滿秩陣。

2 技術(shù)路線方案與精度分析
2.1 技術(shù)路線方案
掃描前進(jìn)行技術(shù)路線方案規(guī)劃,根據(jù)掃描物項(xiàng)的多少及堆放位置,儀器的掃描距離、掃描觀測(cè)的通視條件進(jìn)行測(cè)站設(shè)計(jì)、分辨率選擇、標(biāo)靶布置,具體技術(shù)路線方案如下:
掃描策劃—現(xiàn)場(chǎng)勘察—測(cè)站規(guī)劃—標(biāo)靶設(shè)置—外業(yè)掃描—數(shù)據(jù)導(dǎo)出—數(shù)據(jù)拼接—去噪處理—單元數(shù)據(jù)提取—特征點(diǎn)擬合—特征點(diǎn)理論數(shù)據(jù)計(jì)算—匹配處理—各單元導(dǎo)入CAD整體拼接—誤差測(cè)量。
2.2 精度分析
三維激光掃描坐標(biāo)系統(tǒng),如圖1所示。O、X、Y、Z構(gòu)成一個(gè)空間直角坐標(biāo)系,θ是掃描儀對(duì)實(shí)體M點(diǎn)測(cè)量的天頂距,α是掃描儀對(duì)實(shí)體P點(diǎn)投影與X軸的水平夾角,S為O點(diǎn)到M點(diǎn)的斜距,由S、θ、α可以用式(15)得到M點(diǎn)的三維坐標(biāo)值[9]。
(15)

圖1 三維激光掃描坐標(biāo)系統(tǒng)
本身的系統(tǒng)誤差和測(cè)角誤差有關(guān),還與待測(cè)物體表面材質(zhì)等特性有關(guān)[10-11],主要是測(cè)距和測(cè)度誤差引起[12-14],即
(16)
(17)
(18)
取S=50 m,sinθcosα最大值為1,sinθ最大值為1,P40掃描儀距離精度1.2+10 ppm,角度精度為8″,則ms=1.2+50 000×10-6=1.25 mm

滿足檢測(cè)精度3 mm要求。
3 工程案例
浙江佛學(xué)院二期彌勒圣壇(圖2)中心部位須彌山倒錐柱天宮工程,由8根立柱組成,立柱預(yù)制加工分四段,每段通過兩個(gè)平臺(tái)的環(huán)向和縱橫鋼梁拼接成整體,平臺(tái)垂直距離為6 000 mm;第一段長(zhǎng)度10 306 mm,底標(biāo)高2.850 m,內(nèi)側(cè)直徑為852 mm;第二段長(zhǎng)度12 000 mm,第三段長(zhǎng)度12 000 mm、第四段長(zhǎng)度12 000 mm,預(yù)制構(gòu)件為斜柱,通過圓心立面向外傾斜6.4°,見圖3、圖4。

圖2 彌勒圣壇鋼結(jié)構(gòu)示意圖

圖3 須彌山倒錐柱天宮工程三維示意圖和立柱鋼梁牛腿加工圖

圖4 須彌山倒錐柱天宮工程結(jié)構(gòu)平面示意圖
由于每條支腿是一個(gè)斜面,平臺(tái)是平面結(jié)構(gòu),對(duì)于鋼梁牛腿連接結(jié)構(gòu)與支腿是非正交結(jié)構(gòu),如何保證整個(gè)拼裝的質(zhì)量是一個(gè)問題,測(cè)量檢查有以下難點(diǎn)。
1)拼裝后平臺(tái)是一個(gè)平面,車間預(yù)制加工時(shí),構(gòu)件各連接鋼梁與立柱之間不成正交,預(yù)制構(gòu)件位置檢查是一個(gè)難點(diǎn),不能直觀檢查對(duì)接位置的質(zhì)量情況,需要通過特殊檢查手段驗(yàn)證預(yù)制構(gòu)件位置準(zhǔn)確后,才能出廠交付安裝。
2)通常檢查手段是采用全站儀配合棱鏡檢查,測(cè)出預(yù)制構(gòu)件各連接點(diǎn)坐標(biāo)[15-16],根據(jù)理論值事先計(jì)算理論坐標(biāo),與實(shí)測(cè)坐標(biāo)比較進(jìn)行偏差計(jì)算[17],計(jì)算工作量大,而且費(fèi)工費(fèi)時(shí),假定值與現(xiàn)場(chǎng)實(shí)際情況有偏差,使檢查精度和進(jìn)度均受到影響[18]。
3.1 項(xiàng)目實(shí)施方案策劃
構(gòu)件每一預(yù)制批次,即每一分段8根柱子分為一批,預(yù)制加工焊接后平放于車間地面,在三點(diǎn)間距約15 m成平面的固定位置布設(shè)黑白標(biāo)靶,在預(yù)制構(gòu)件中間部位架設(shè)掃描儀,構(gòu)件間隔一個(gè)柱子(梁)架設(shè)一次儀器,4站即可掃描完成,掃描完成后數(shù)據(jù)導(dǎo)出,首先通過黑白標(biāo)靶拼成一個(gè)整體數(shù)據(jù),然后按柱子單元提取點(diǎn)云信息,按每一柱子特征坐標(biāo)匹配統(tǒng)一坐標(biāo)下立體位置,在CAD中組合成整體,比較接頭部位偏差數(shù)值。
3.2 外業(yè)掃描
鋼柱加工完成任務(wù)后,在車間地面上處于平放位置,見圖5。

圖5 三維掃描現(xiàn)場(chǎng)工作圖
具體操作步驟為在靠近掃描鋼柱中間部位附近,便于通視鋼柱位置架設(shè)掃描儀,進(jìn)行全方位掃描,掃描時(shí)調(diào)整分辨率和質(zhì)量等級(jí)。按照現(xiàn)場(chǎng)擺放的順序進(jìn)行現(xiàn)場(chǎng)掃描,記錄編號(hào),現(xiàn)場(chǎng)以A~H順序,便于后期數(shù)據(jù)處理基于標(biāo)靶和坐標(biāo)進(jìn)行拼接區(qū)分。掃描分為兩步,第一步為粗掃描,即為范圍內(nèi)全掃描,有個(gè)初步輪廓;第二步為精掃描,對(duì)特殊位置、標(biāo)靶框選加質(zhì)量掃描。
為了保證掃描質(zhì)量,掃描時(shí)需注意以下事項(xiàng):
1)架站位置應(yīng)位于較全面通視構(gòu)件全景位置,特別是正面全貌位置、支腿位置等關(guān)鍵部位。
2)儀器架設(shè)應(yīng)位于中間部位,以保證點(diǎn)云密度的均勻性,距離一般不超出50 m。
3)為避免掃描數(shù)據(jù)點(diǎn)云過大,首先可以采用低等級(jí)點(diǎn)云密度掃描,對(duì)關(guān)鍵部位采用窗選進(jìn)行加密掃描,即保證精度又能加快進(jìn)度,同時(shí)減少數(shù)據(jù)處理量。
4)下一站應(yīng)注意對(duì)上一站掃描數(shù)據(jù)的補(bǔ)充,避免數(shù)據(jù)缺漏。
5)做好標(biāo)靶、測(cè)站、柱子(梁)掃描信息記錄,以便于內(nèi)業(yè)數(shù)據(jù)處理。
3.3 點(diǎn)云數(shù)據(jù)拼接處理
外業(yè)全部掃描結(jié)束后,將掃描數(shù)據(jù)導(dǎo)入Cyclone軟件進(jìn)行數(shù)據(jù)處理,在Cyclone軟件中首先通過標(biāo)靶,將數(shù)據(jù)拼成整體;去除不需要點(diǎn)云。
擬合各鋼柱特征點(diǎn),因特征點(diǎn)上無法全部使用標(biāo)靶,只有部分使用標(biāo)靶,在沒有標(biāo)靶位置可以在三維點(diǎn)云圖形上增加頂點(diǎn)的方法進(jìn)行擬合特征點(diǎn),擬合點(diǎn)位作為后面拼接的基準(zhǔn),同時(shí)也需要在眾多點(diǎn)云上選擇準(zhǔn)確、恰當(dāng)?shù)奶卣鼽c(diǎn)。圖6所示。

圖6 擬合標(biāo)靶點(diǎn)及頂點(diǎn)
3.4 理論數(shù)據(jù)計(jì)算
根據(jù)設(shè)計(jì)圖紙及掃描擬合點(diǎn)位,假定圓心坐標(biāo)為(0,0),以半徑及尺寸計(jì)算鋼柱4個(gè)特征點(diǎn)坐標(biāo)。每根鋼柱之間為45°均勻分布,與正交軸線角度為22.5°;以方位22.5°角第一段鋼柱G序號(hào)為例計(jì)算特征點(diǎn)坐標(biāo)(鋼柱角點(diǎn),鋼柱寬300 mm),鋼柱下口內(nèi)側(cè)直徑為0.852 m,G鋼柱下口點(diǎn)坐標(biāo)為:
計(jì)算各特征點(diǎn)的理論坐標(biāo);以方位22.5°柱子為例,底口半徑為852/2=426,則柱側(cè)面中心坐標(biāo):
X下=0.426×cos22.5°=0.394 m;
Y下=0.426×sin22.5°=0.163 m;
柱寬300 mm,擬合特征點(diǎn)位于邊緣4 mm,則:
X22.5-1=0.394+(0.3/2-0.004)×cos(22.5+90)°=0.338 m
Y22.5-1=0.163+(0.3/2-0.004)×sin(22.5+90)°=0.298 m
同理計(jì)算出上口、下口4個(gè)特征點(diǎn)位坐標(biāo)為:
22.5-1(X0.338,Y0.298,H2.850),22.5-2(X0.450,Y0.028,H2.850)
22.5-3(X1.395,Y0.736,H13.058),22.5-4(X1.507,Y0.466,H13.058)8個(gè)柱子特征點(diǎn)的坐標(biāo)見表1。
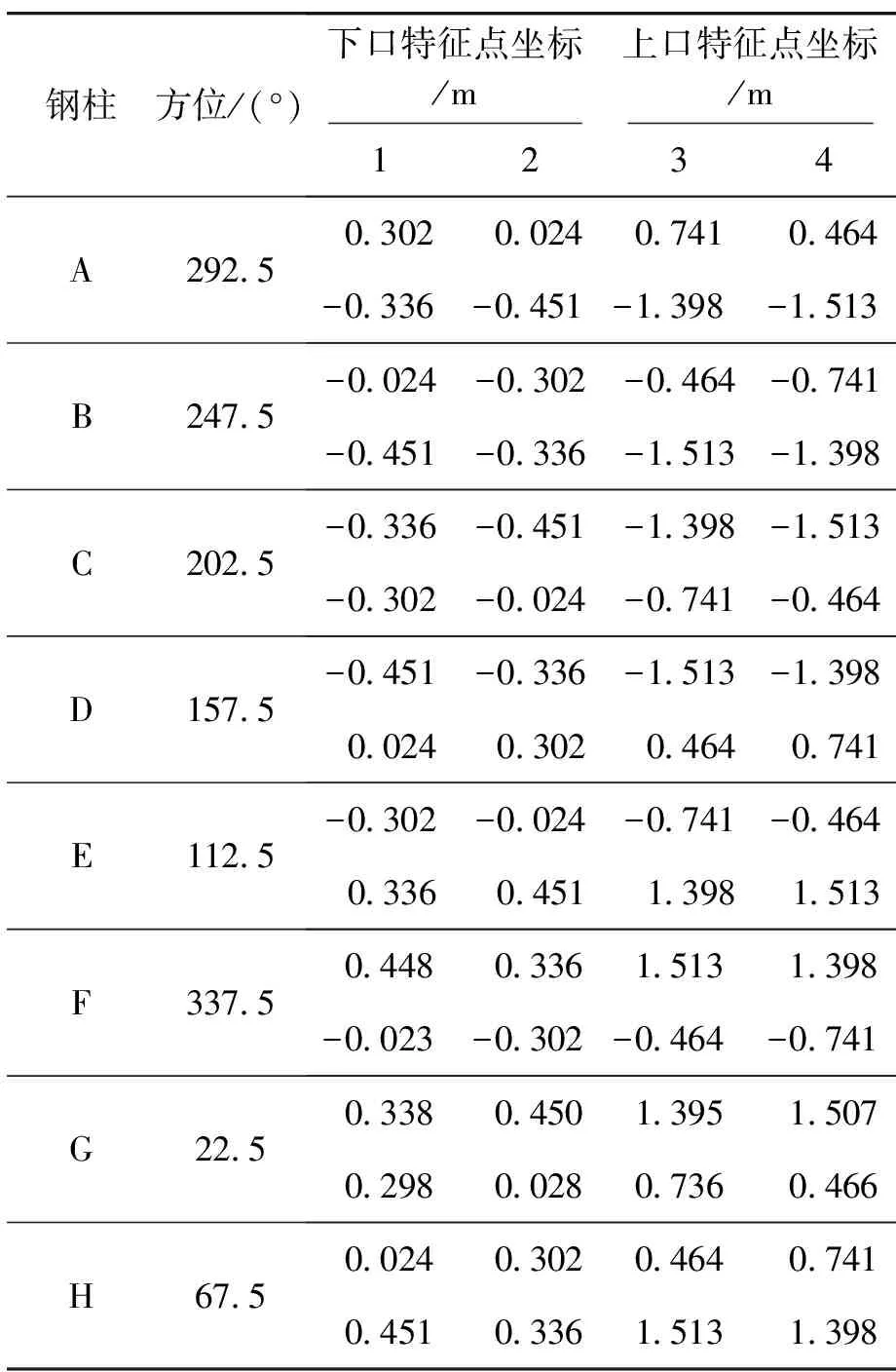
表1 第一段鋼柱特征點(diǎn)坐標(biāo)
3.5 匹配處理
待特征點(diǎn)擬合好后就可以基于特征點(diǎn)坐標(biāo)進(jìn)行每根鋼柱配準(zhǔn),這個(gè)過程分步進(jìn)行,因?yàn)閽呙钑r(shí)是全部放置在地面上,而拼接是空間信息,拼接后成圓錐形的,提取每根柱子點(diǎn)云按照每根鋼柱特征點(diǎn)進(jìn)行配準(zhǔn);柱拼接三維誤差為3 mm,精度完全符合檢測(cè)要求。
3.6 各單元導(dǎo)入CAD整體拼接及誤差測(cè)量
單根鋼柱按照統(tǒng)一坐標(biāo)系進(jìn)行分步拼接后,將每根鋼柱的點(diǎn)云數(shù)據(jù)導(dǎo)入CAD中,形成整體三維立體圖形(以第一段8根鋼柱為例),見圖7、圖8(部分點(diǎn)云隱藏,僅顯示鋼梁牛腿位置點(diǎn)云),圖中點(diǎn)云與理論設(shè)計(jì)模型比對(duì),誤差詳見表2,鋼柱鋼梁牛腿位置偏差為G鋼柱上部的20 mm、D鋼柱下部18 mm,需要矯正,其他誤差在10 mm左右,也需要稍微調(diào)整下,說明鋼構(gòu)件加工有誤差存在,大部分滿足施工要求。

表2 支腿鋼梁牛腿誤差(與理論值比較) 單位:mm

圖7 拼接后立體圖形

圖8 拼接后平面圖形
表2和表3為第一段8根鋼柱鋼梁牛腿誤差情況表。從表3中看出,D和G鋼柱對(duì)接相對(duì)誤差為27 mm,變形方向相異,需要進(jìn)行矯正。經(jīng)過矯正后鋼柱就可出廠交付安裝,在施工現(xiàn)場(chǎng)進(jìn)行實(shí)際拼裝誤差在8 mm內(nèi),做到一次拼裝合格。

表3 支腿鋼梁牛腿誤差(對(duì)應(yīng)連接構(gòu)件拼接誤差) 單位:mm
4 結(jié)論
三維掃描技術(shù)在鋼結(jié)構(gòu)構(gòu)件中拼接檢測(cè)充分發(fā)揮其不接觸、全方位掃描功能,并能夠減少相關(guān)工作量,是具有較強(qiáng)可操作性的空間檢測(cè)方法。拼接的精度與掃描的質(zhì)量分辨率有關(guān),質(zhì)量和分辨率越高,掃描的點(diǎn)云越多,圖像越接近真實(shí)實(shí)體,結(jié)果越準(zhǔn)確;但同時(shí)也加大軟件運(yùn)行處理工作量。在滿足一定的精度要求下可減少質(zhì)量與分辨率的等級(jí),提升軟件運(yùn)行速度。三維掃描技術(shù)構(gòu)件預(yù)拼裝具有以下特點(diǎn):
1)掃描坐標(biāo)系可以針對(duì)每一個(gè)構(gòu)件建立,檢查時(shí)可以分不同車間,不同時(shí)間段進(jìn)行,適應(yīng)性大大提高。
2)同全站儀檢查方法相比,構(gòu)件檢查全面,內(nèi)業(yè)數(shù)據(jù)更加豐富;數(shù)據(jù)精度高,計(jì)算結(jié)果可靠有效,有助于現(xiàn)場(chǎng)施工的質(zhì)量控制。
3)針對(duì)構(gòu)件模塊、鋼梁等,特別是位于高空的物項(xiàng)檢查,無須登高,安全性大大提高。
4)操作方便快捷、無須外部起重設(shè)備配合,無接觸,對(duì)構(gòu)件不造成傷害;檢測(cè)靈活,減少測(cè)量外業(yè)時(shí)間,有效縮短工期,勞動(dòng)效率提高60%以上。
猜你喜歡
數(shù)學(xué)小靈通·3-4年級(jí)(2024年2期)2024-05-15 02:02:28
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2022年3期)2022-04-26 14:04:16
數(shù)學(xué)年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學(xué)學(xué)報(bào)(2020年2期)2020-04-01 03:50:40
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中等數(shù)學(xué)(2019年8期)2019-11-25 01:38:14
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
廣西科技大學(xué)學(xué)報(bào)(2016年1期)2016-06-22 13:10:38
