基于三維激光掃描的軌道交通橋梁墩柱水平位移自動監(jiān)測方法
2023-03-09 07:05:46趙棟
北京測繪 2023年8期
趙 棟
(中材地質(zhì)工程勘查研究院有限公司,北京 100102)
0 引言
隨著現(xiàn)代化社會的飛速發(fā)展,國內(nèi)建筑工程項目數(shù)量與日俱增,規(guī)模也越來越大,因此,對于建筑項目的安全成為人們重點關(guān)注的問題。由于高速公路和鐵路等軌道交通工程項目在建設(shè)中,存在大量的橋梁建設(shè)工程,而橋梁墩柱在地震或風(fēng)崩等自然災(zāi)害發(fā)生時,會承受巨大的力量,導(dǎo)致其發(fā)生一定程度的位移。此外,人為因素如過載、施工不當(dāng)?shù)纫部赡芤饦蛄簶蚨盏奈灰啤H绻麡蛄憾罩奈灰瞥^了規(guī)定的安全范圍,可能會導(dǎo)致結(jié)構(gòu)安全受損,甚至威脅到行車的安全[1]。同樣也會使得橋梁的維護(hù)成本和維護(hù)周期增加。因此,需要對橋梁墩柱的位移情況進(jìn)行監(jiān)測。
有研究學(xué)者采用全球?qū)Ш叫l(wèi)星系統(tǒng)(globalnavigation satellite system,GNSS)和全站儀自由測站相結(jié)合的方法,對跨海大橋橋墩水平位移進(jìn)行監(jiān)測。使用GNSS定位方法,布設(shè)方便聯(lián)測的工作基點,使用平差軟件對測量數(shù)據(jù)進(jìn)行處理,計算監(jiān)測點對應(yīng)坐標(biāo)的誤差,實現(xiàn)跨海大橋橋墩水平位移的精準(zhǔn)監(jiān)測[2]。還有學(xué)者在綜合考慮監(jiān)測周期、現(xiàn)場條件之后,建立了針對橋梁高墩墩頂位移的監(jiān)測系統(tǒng),采用位移傳感器對主梁和橋墩柱位移情況進(jìn)行監(jiān)測[3]。但是上述方法容易受到監(jiān)測環(huán)境的影響,降低了監(jiān)測的精準(zhǔn)度,影響最終的監(jiān)測結(jié)果。
三維激光掃描技術(shù)采用非接觸式的測量方式,跨越各種障礙物進(jìn)行測量,可以有效避免傳統(tǒng)測量方法中出現(xiàn)的死角和盲區(qū),采集到的三維數(shù)據(jù)可以通過現(xiàn)代化的計算機(jī)軟件進(jìn)行處理和分析,能夠以極高的分辨率獲取橋梁結(jié)構(gòu)的三維模型,具有高精度的測量能力,可以實現(xiàn)對橋梁墩柱位移的有效監(jiān)測。將三維激光掃描技術(shù)應(yīng)用與軌道交通橋梁墩柱的位移監(jiān)測中,根據(jù)試驗區(qū)邊坡地質(zhì)條件及自動化儀器的設(shè)置,仔細(xì)規(guī)劃掃描過程,提升了掃描的實時性與可靠性,結(jié)合誤差反應(yīng)結(jié)果能夠及時監(jiān)測邊坡位移變化的情況。
因此,為了解決現(xiàn)有監(jiān)測方法存在的不足,本文采用三維激光掃描技術(shù),對軌道交通橋梁墩柱水平位移自動監(jiān)測方法展開研究。
1 軌道交通橋梁墩柱水平位移自動監(jiān)測
1.1 三維激光掃描橋梁墩柱預(yù)留變形
三維激光掃描通過激光發(fā)射裝置將激光發(fā)射至被測物體表面,計算返回激光從發(fā)射點到返回后的時間長短,得到對應(yīng)距離為S,在測距過程匯總掃描儀對目標(biāo)點水平與垂直的夾角進(jìn)行高速旋轉(zhuǎn),根據(jù)測量點的位置坐標(biāo)p(x,y,z)形成目標(biāo)空間密集點云數(shù)據(jù)。使用三維激光掃描設(shè)備采集點云數(shù)據(jù),并運用攝像機(jī)拍攝被測目標(biāo)的影像數(shù)據(jù),將得到的影像數(shù)據(jù)進(jìn)行數(shù)字化處理。對該工程橋墩K0+013.800~K0+046.800段進(jìn)行水平位移監(jiān)測,在橋梁施工中,橋墩開挖后處于臨空狀態(tài),運用三維激光掃描可以獲得斷面與設(shè)計斷面套合,得到初始凈空值為b0,數(shù)據(jù)采集過程中按照橋墩水平位移量監(jiān)測隨時控制監(jiān)測頻率。在測試站點布置兩個反射裝置,將兩個反射裝置沿著橋梁墩柱縱向放置,并位于監(jiān)測設(shè)備9~12 m處。兩個反射裝置分別擺放在對應(yīng)位置,并使得兩個裝置之間存在一定的高度差[4]。運用測量儀器測量反射裝置的中心點坐標(biāo),有利于工程坐標(biāo)轉(zhuǎn)換。計算兩組點云數(shù)據(jù)之間的相鄰點距離,對變形程度進(jìn)行分析。設(shè)定鄰近點a與b,兩個點之間的距離為l。設(shè)定s為距離l的參照面,在s1中尋找距離s2最近的點并計算兩點之間的距離。兩組點云數(shù)據(jù)變形公式為
(1)
式中,ai為參照點云數(shù)據(jù)s1中的任意點;bi為鄰近點。l2在一般情況下準(zhǔn)確程度與s1和s2的粗糙程度和點密度有關(guān)。點云拼接的精度可以通過獨立的控制點或者通過沒有參加拼接運算的參考平面進(jìn)行檢校。不同方向的拼接誤差是不同的,如果拼接時三維的約束存在不均勻情況,則無法在空間內(nèi)均勻分布,因此可能導(dǎo)致一組點云數(shù)據(jù)中出現(xiàn)部分點云數(shù)據(jù)拼接精度較低的情況[5]。由于點云數(shù)據(jù)的粗糙度和掃描儀本身的點位置不確定性,會導(dǎo)致在兩次掃描獲取的點云數(shù)據(jù)中,同一位置上的點較難被準(zhǔn)確識別為同一個點。由此可能導(dǎo)致即使表面在兩次監(jiān)測中未發(fā)生變化,但依舊會使表面出現(xiàn)一些視覺變化。為了消除粗糙度的影響,需設(shè)立置信區(qū)間,提高點云拼接精度。
1.2 全息位移自動化監(jiān)測
當(dāng)存在真正變形的時候,封閉的模型會發(fā)生改變,可通過對模型的識別來確定變化的范圍[6]。點云粗糙度是指散亂點云數(shù)據(jù)中散亂點到表面模型距離的標(biāo)準(zhǔn)中誤差,其中表面模型一般指局部表面模型,也可以通過連續(xù)窗口中坡度的變化來衡量。散亂點集η中點云數(shù)據(jù)粗糙程度的計算公式為
(2)
式中,g為點云數(shù)據(jù)粗糙程度;n為點云數(shù)據(jù)中的點個數(shù);d為點到模型表面的距離。提升點云粗糙度,位移監(jiān)測精度會隨之提升。利用三維空間格網(wǎng)對點云進(jìn)行分割,在不同區(qū)域內(nèi)建立表面模型,計算散亂點云數(shù)據(jù)中每個點到模型的正交距離,參考面方程表達(dá)式為
z=β0+β1x+β2y
(3)
式中,x,y和z為空間點坐標(biāo);β為參考面函數(shù)參數(shù);確定平面后轉(zhuǎn)換所有數(shù)據(jù)的向量值,使得網(wǎng)格中所有的數(shù)據(jù)點基準(zhǔn)面是相同的[7]。計算轉(zhuǎn)換后的向量投影到平面的法向量值,得到網(wǎng)格內(nèi)的點到平面的正交距離后,計算點云的粗糙度公式為
(4)

2 實驗測試與分析
2.1 工程概況
熙江路擬建道路路幅寬為12 m,設(shè)計速度20 km/h。該道路全線進(jìn)入軌道交通二號線大江~魚洞站高架區(qū)間軌道控制保護(hù)區(qū)范圍內(nèi)。該道路位于軌道二號線高架區(qū)間北側(cè),道路走向與軌道線路平行。熙江路對軌道交通的外部作業(yè)影響等級為一級。K0+013.800~K0+046.800段為路基挖方段,最大挖方高度約6l.7 m,邊坡采用樁板擋墻支護(hù)。K0+046.800~K0+115.300段為路基挖方段,最大挖方高度約3 m,邊坡采用重力式擋墻支護(hù)。K0+115.300~K0+170.550段為零填零挖段。K0+170.550~K0+233.600段為路基填方段,最大填方高度約1.9 m,邊坡采用1∶1.5自然放坡。K0+233.600~K0+418.400段為路基填方段,最大填方高度為6.3 m,邊坡采用樁板擋墻支護(hù)。K0+418.400~終點段除終點設(shè)置格構(gòu)護(hù)坡,其余為零填零挖。熙江路邊坡安全等級為一級,采用抗滑樁+地基處理+重力式擋墻+坡率法放坡(格構(gòu)植草護(hù)坡)+截排水工程進(jìn)行綜合治理。
2.2 搭建實驗環(huán)境
在試驗區(qū)中,設(shè)定進(jìn)行三次連續(xù)的三維掃描[10-11]。采集實驗區(qū)域所有數(shù)據(jù),獲得墩柱點云數(shù)據(jù)。測站A設(shè)定坐標(biāo)為X1=0.000 m,Y1=0.000 m,Z1=0.000 m。測站B設(shè)定坐標(biāo)為X2=456.92 m,Y2=-475.21 m,Z2=35.23 m。將每次掃描的數(shù)據(jù)合成為一組數(shù)據(jù)。選用U-Bcm系列地面三維激光掃描儀。每次進(jìn)行掃描工作時,要將掃描設(shè)備放置在固定的三腳支架上,隨后再完成對中改變,最后對掃描設(shè)備完成設(shè)置,將掃描頭瞄準(zhǔn)需要掃描的橋墩位置。掃描設(shè)備通過電線連接到主機(jī)端,形成采集與掃描數(shù)據(jù)連接網(wǎng)。其中,掃描設(shè)備需要監(jiān)測的項目及工作量如表1所示。
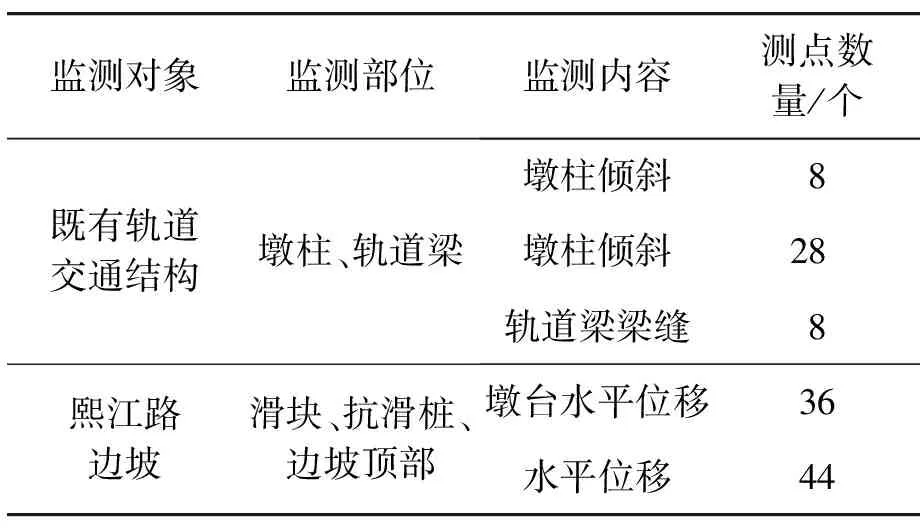
表1 監(jiān)測項目及工作量
墩臺水平位移監(jiān)測點布設(shè)在墩柱上,每個墩柱布設(shè)1個點。在距離二號線距離最近的3剖面所對應(yīng)的8個墩柱進(jìn)行自動化監(jiān)測墩柱傾斜,每個墩柱布設(shè)1個自動化監(jiān)測點。其中,既有軌道交通結(jié)構(gòu)監(jiān)測點布置斷面如圖1所示。
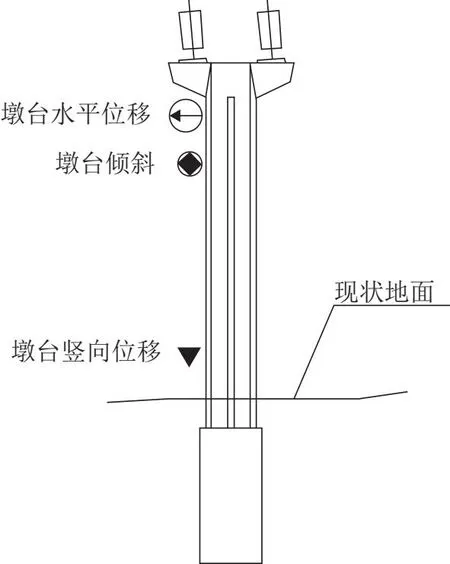
圖1 既有軌道監(jiān)測斷面布置
由于實地試驗區(qū)域的氣候環(huán)境不佳,存在大量的粉塵顆粒,這樣就導(dǎo)致掃描設(shè)備發(fā)出的激光在較差的空氣環(huán)境中受到一定的影響。如果在試驗區(qū)中存在行駛車輛,在經(jīng)過掃描區(qū)域時同樣也會產(chǎn)生一定的影響,使得實驗結(jié)果存在誤差。因此,需要進(jìn)行噪聲消除處理。利用三維激光掃描儀對試驗區(qū)進(jìn)行掃描工作時,設(shè)置橋墩反射裝置作為固定點,根據(jù)反射裝置靶心建立三維坐標(biāo),分析靶心中的移動趨勢來記錄其橋墩水平位移情況[12]。
2.3 測試結(jié)果與分析
設(shè)置三個小組,運用本文方法的小組為實驗組,運用文獻(xiàn)[2]提出的方法(對照組1)與文獻(xiàn)[3]提出的方法作為對照組。運用三維激光掃描位移設(shè)備進(jìn)行位移監(jiān)測時,根據(jù)第一個峰值的位置,對位置進(jìn)行適當(dāng)?shù)恼{(diào)整使得結(jié)果實現(xiàn)時域統(tǒng)一。在頻域上,三維激光掃描位移設(shè)備采集數(shù)據(jù)頻率為110 Hz。當(dāng)圖像的像素存在差異時傳輸圖像的速率也存在差異。設(shè)置圖像大小為1 080 pixel×640 pixel,獲取視頻的實際頻率為30.25 Hz。利用β-極差函數(shù)運算不同位移設(shè)備的數(shù)據(jù)使得結(jié)果實現(xiàn)統(tǒng)一頻域。人工監(jiān)測得到的位移量標(biāo)準(zhǔn)范圍為2 mm以內(nèi)。相關(guān)系數(shù)平方值R2的標(biāo)準(zhǔn)值為0.94,歸一化均方根誤差N的標(biāo)準(zhǔn)值為0.05。在試驗測量時間段內(nèi),不同小組的軌道交通橋梁水平位移監(jiān)測的結(jié)果,具體如圖2所示。
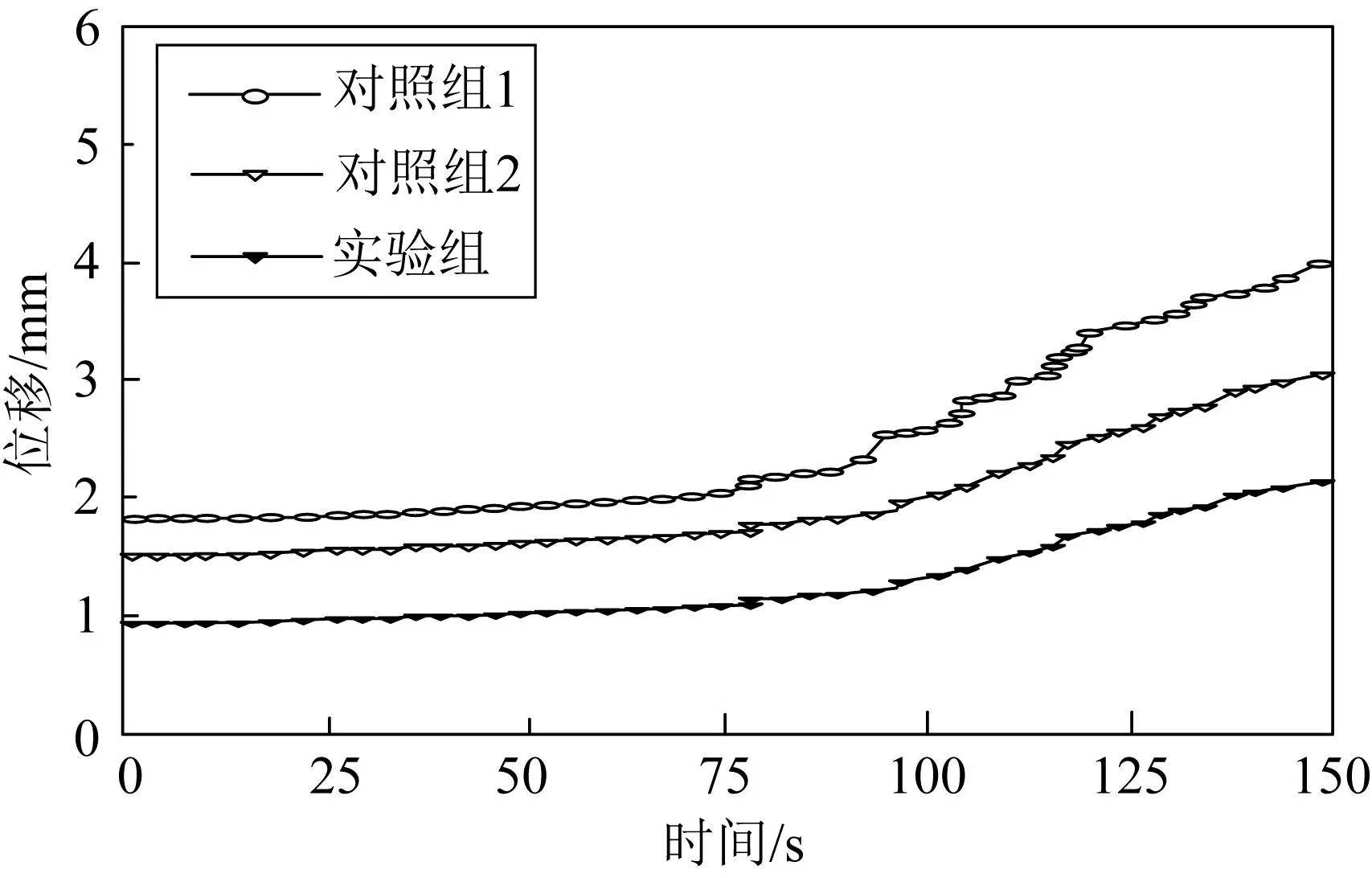
圖2 監(jiān)測位移對比圖
由實驗結(jié)果可知,三個小組對于橋墩水平位移自動化監(jiān)測的趨勢存在差異。隨著時間的變化,實驗組的位移數(shù)值最貼近人工監(jiān)測數(shù)值。說明本文方法與對照組方法相比,對于橋墩水平位移的自動化監(jiān)控是可靠的。
設(shè)定R2和N為水平位移設(shè)備的相關(guān)性和精準(zhǔn)度來判斷設(shè)備監(jiān)測是否精準(zhǔn),其計算公式為

由結(jié)果可知,三維激光掃描技術(shù)監(jiān)測位移的相關(guān)系數(shù)平方值最接近標(biāo)準(zhǔn)值,說明設(shè)備的相關(guān)性高,監(jiān)測結(jié)果真實可靠。這是由于激光器具有高度的穩(wěn)定性,它們發(fā)出的激光是極為穩(wěn)定和一致的,應(yīng)用三維激光掃描技術(shù)的測量方式可以消除物體表面的反射和散射對測量結(jié)果的影響,并通過對點云數(shù)據(jù)的計算,進(jìn)一步提高了測量數(shù)據(jù)的精準(zhǔn)度[13-14]。
同時,實驗組的歸一化均方根誤差小于0.05,誤差小說明設(shè)備的測量精準(zhǔn)度高,能夠滿足具體應(yīng)用要求。提升了設(shè)備對于水平位移自動化監(jiān)測的性能,使得監(jiān)測結(jié)果更加準(zhǔn)確,具有較強(qiáng)的科學(xué)性價值。解決了自動化監(jiān)測與影像傳輸中存在的問題,實現(xiàn)了較好的自動化監(jiān)測[15]。
3 結(jié)束語
本文從軌道交通橋梁墩柱水平位移自動監(jiān)測入手,通過三維激光掃描技術(shù),探究了基于三維激光掃描的軌道交通橋梁墩柱水平位移自動監(jiān)測方法。但是方法中還存在著不足,例如算法的更新問題,數(shù)據(jù)檢測的耗時性問題。今后應(yīng)更加完善計算,運用三維激光掃描技術(shù)在監(jiān)測中能夠提供高精度的實物掃描并及時得到測繪數(shù)據(jù)。預(yù)防產(chǎn)生安全隱患,提升工程項目的經(jīng)濟(jì)效益,為工程項目提供嚴(yán)謹(jǐn)性資料,為決策方帶來對應(yīng)的參數(shù)依據(jù),完善對軌道交通橋梁墩柱水平位移自動監(jiān)測的研究。
猜你喜歡
中國特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
美與時代·美術(shù)學(xué)刊(2022年3期)2022-04-27 01:18:15
人大建設(shè)(2019年12期)2019-05-21 02:55:32
湖南教育·A版(2019年4期)2019-05-10 03:31:44
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級)(2019年4期)2019-04-22 03:28:24
電子制作(2018年11期)2018-08-04 03:26:08
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:04
工業(yè)設(shè)計(2016年12期)2016-04-16 02:52:00
消費者報道(2014年7期)2014-07-31 11:23:57
中國火炬(2010年8期)2010-07-25 11:34:30
