深海采礦動(dòng)態(tài)數(shù)字孿生系統(tǒng)開發(fā)
2023-02-15 07:09:46羅嵐周崇堯胡瓊楊杰鄒科屈衍
哈爾濱工程大學(xué)學(xué)報(bào) 2023年2期
羅嵐, 周崇堯, 胡瓊, 楊杰, 鄒科, 屈衍,
(1.南方科技大學(xué) 海洋科學(xué)與工程系,廣東 深圳 518055; 2.華南理工大學(xué) 海洋科學(xué)與工程學(xué)院,廣東 廣州 518110; 3.中南大學(xué) 機(jī)電學(xué)院,湖南 長沙 410083)
數(shù)字孿生(digital twin)的概念由Grieves[1]于2003年產(chǎn)品全生命周期管理課程中提出,稱之為“鏡像空間模型”,2011年正式確定“數(shù)字孿生”概念[2]。數(shù)字孿生利用信息處理層將物理空間與數(shù)字空間連接[2-3],集模擬、監(jiān)控、計(jì)算、預(yù)測、調(diào)控于一體,具有安全、高效、精準(zhǔn)的特點(diǎn)。目前關(guān)于數(shù)字孿生廣泛接受的定義是:數(shù)字孿生是一個(gè)集多物理場、多尺度、多概率的仿真模型,能夠利用物理模型、傳感器數(shù)據(jù)和歷史數(shù)據(jù)等反映該模型對(duì)應(yīng)實(shí)體的功能、實(shí)時(shí)狀態(tài)及演變趨勢(shì)[4]。
動(dòng)態(tài)數(shù)字孿生集成物理實(shí)體,高精度、多尺度數(shù)字模型,以及物理空間與數(shù)字空間狀態(tài)信息,對(duì)物理實(shí)體的動(dòng)態(tài)行為進(jìn)行全方位、多尺度精準(zhǔn)映射,實(shí)現(xiàn)對(duì)物理實(shí)體的狀態(tài)信息采集與處理、動(dòng)態(tài)行為實(shí)時(shí)映射、運(yùn)行操作模擬規(guī)劃、設(shè)備健康監(jiān)測與管理,被認(rèn)為是促進(jìn)生產(chǎn)方式與管理模式變革的重要舉措。該技術(shù)還可以融合大數(shù)據(jù)、人工智能算法等技術(shù),實(shí)現(xiàn)物理空間狀態(tài)預(yù)測,設(shè)備預(yù)防性維護(hù),為建立服務(wù)于產(chǎn)品全生命周期的運(yùn)行管理平臺(tái)提供解決方案。
近年來,動(dòng)態(tài)數(shù)字孿生在海洋工程領(lǐng)域逐漸得到研究與應(yīng)用。挪威Oseberg-H海上無人井口平臺(tái)利用動(dòng)態(tài)數(shù)字孿生,實(shí)現(xiàn)平臺(tái)無人化生產(chǎn)運(yùn)行,使其開發(fā)與運(yùn)營成本比原計(jì)劃降低約20%[5]。Shim等[6]提出使用動(dòng)態(tài)數(shù)字孿生,對(duì)混凝土橋梁進(jìn)行建模、分析、設(shè)計(jì)、監(jiān)控以及預(yù)防性維護(hù)等,提高橋梁安全性。Sivalingam等[7]利用動(dòng)態(tài)數(shù)字孿生,評(píng)估海上風(fēng)力渦輪機(jī)的剩余使用壽命,對(duì)其進(jìn)行故障診斷以及預(yù)防性維護(hù)。Renzi等[8]利用動(dòng)態(tài)數(shù)字孿生,對(duì)海上浮式生產(chǎn)系統(tǒng)進(jìn)行資產(chǎn)管理與分析,提高管理效率,降低人員管理成本。Coraddu等[9]利用動(dòng)態(tài)數(shù)字孿生,評(píng)估環(huán)境污染對(duì)行船速度的影響,提升船舶的行駛效率。
近年來,深海采礦行業(yè)得到越來越多的重視。深海采礦系統(tǒng)通常為超深水作業(yè),水深范圍達(dá)到4~6 km,作業(yè)環(huán)境苛刻,系統(tǒng)集成協(xié)調(diào)配合要求高,需要對(duì)系統(tǒng)進(jìn)行全方位、多尺度監(jiān)測與管理。動(dòng)態(tài)數(shù)字孿生技術(shù)的完善和提出,為深海采礦過程狀態(tài)監(jiān)測與系統(tǒng)控制提供了理想的解決方案。將動(dòng)態(tài)數(shù)字孿生技術(shù)應(yīng)用于深海采礦作業(yè)全生命周期[10],實(shí)現(xiàn)采礦過程數(shù)字化、可視化、智能化,是保障深海采礦系統(tǒng)安全、高效作業(yè)的有效手段。本文針對(duì)常見深海采礦系統(tǒng)特點(diǎn),探討了深海采礦動(dòng)態(tài)數(shù)字孿生系統(tǒng)的結(jié)構(gòu)、功能及構(gòu)建方法。
1 深海采礦系統(tǒng)簡介
典型深海采礦系統(tǒng)由集礦機(jī)系統(tǒng)、礦物輸送系統(tǒng)、立管系統(tǒng)、水面母船系統(tǒng)等4部分組成,如圖1所示。深海采礦系統(tǒng)作業(yè)流程如下:
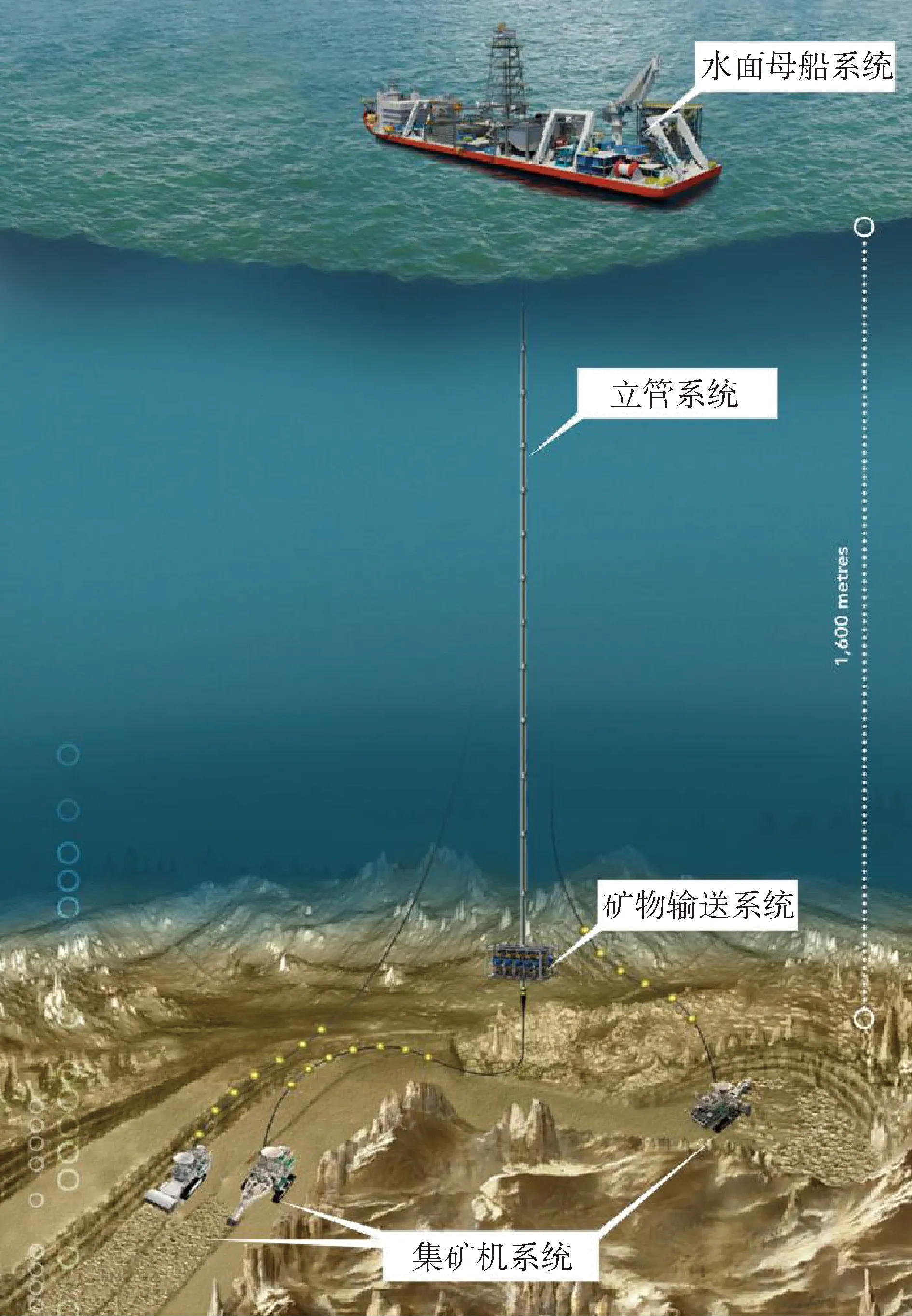
圖1 深海采礦系統(tǒng)組成Fig.1 Composition of the deep-sea mining system
1)水面母船將采礦設(shè)備運(yùn)送到工作海域,完成集礦機(jī)系統(tǒng)、礦物輸送系統(tǒng)、立管系統(tǒng)布放與調(diào)試;
2)集礦機(jī)行駛至作業(yè)區(qū)域后,開始進(jìn)行集礦作業(yè);
3)集礦機(jī)通過礦物輸送系統(tǒng),將采集的礦物輸送至中繼器;
4)通過立管系統(tǒng)中的揚(yáng)礦泵將中繼器中的礦物提升至水面母船;
5)采礦作業(yè)結(jié)束后,各子系統(tǒng)依次回收至水面母船。
深海采礦動(dòng)態(tài)數(shù)字孿生系統(tǒng)應(yīng)用框架由物理空間、數(shù)字空間、信息處理層3部分組成,三者通過數(shù)據(jù)連接形成閉環(huán)融合。系統(tǒng)在應(yīng)用過程中,數(shù)字空間可對(duì)物理空間進(jìn)行全方位、多尺度動(dòng)態(tài)建模、實(shí)時(shí)映射,結(jié)合物理算法對(duì)物理空間進(jìn)行狀態(tài)預(yù)測,為未來運(yùn)行方案制定提供參考,提高深海采礦系統(tǒng)控制水平。
通過動(dòng)態(tài)數(shù)字孿生實(shí)現(xiàn)深海采礦智能化作業(yè)后,設(shè)備操作方式將轉(zhuǎn)為使用經(jīng)過動(dòng)態(tài)模擬驗(yàn)證后的作業(yè)方案驅(qū)動(dòng)采礦設(shè)備運(yùn)行,主動(dòng)引導(dǎo)采礦系統(tǒng)狀態(tài)變化,提高作業(yè)效率與安全性。深海采礦動(dòng)態(tài)數(shù)字孿生系統(tǒng)應(yīng)用框架如圖2所示。
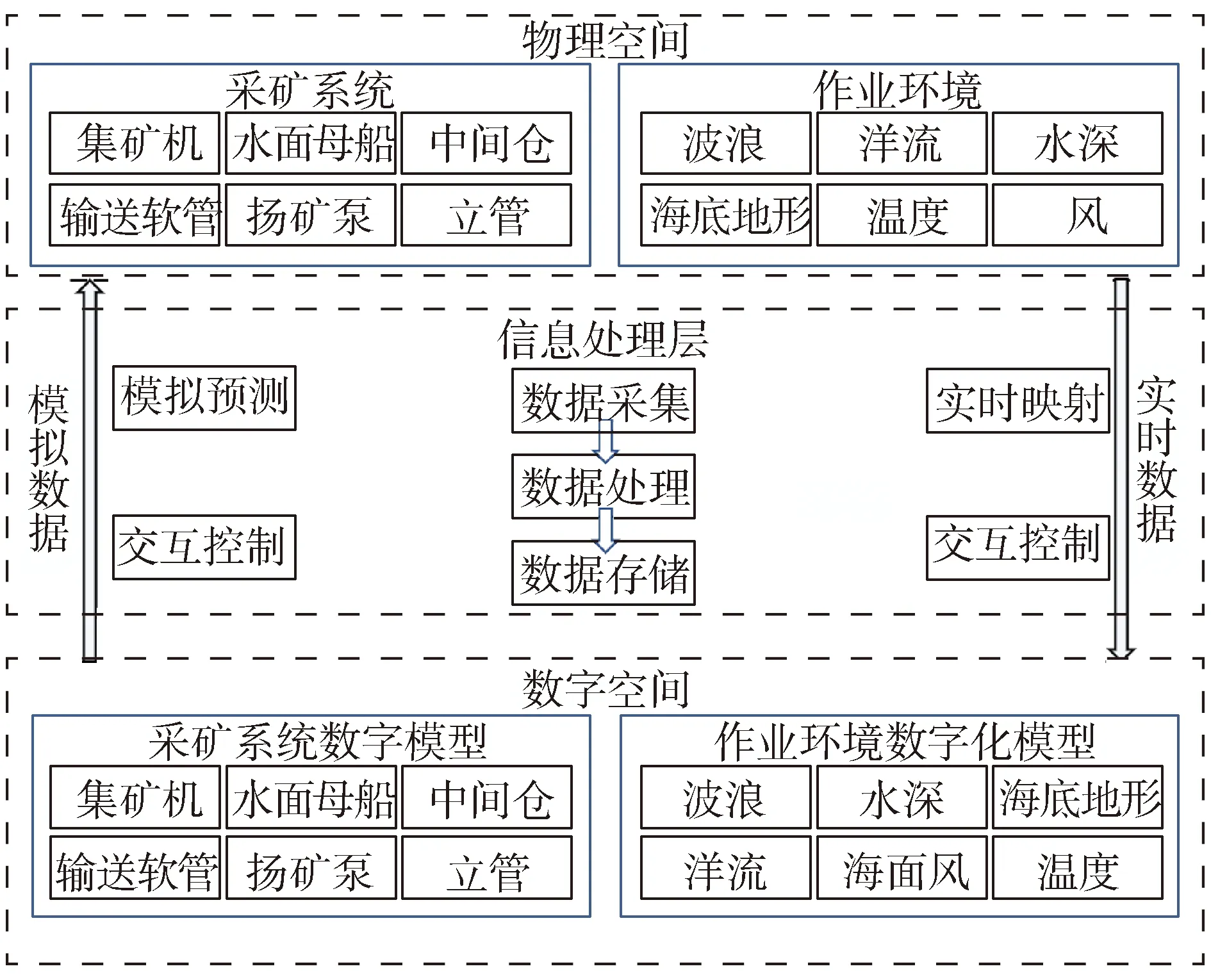
圖2 深海采礦動(dòng)態(tài)數(shù)字孿生系統(tǒng)應(yīng)用框架Fig.2 Application framework of dynamic digital twin system of deep-sea mining
動(dòng)態(tài)數(shù)字孿生系統(tǒng)服務(wù)于深海采礦全生命周期,將實(shí)現(xiàn)功能如下:
1)采礦作業(yè)前:對(duì)采礦方案進(jìn)行可視化模擬預(yù)演,結(jié)合歷史數(shù)據(jù),對(duì)采礦方案進(jìn)行優(yōu)化,同時(shí)儲(chǔ)存模擬數(shù)據(jù),為今后方案制定提供參考;
2)采礦過程中:對(duì)采礦過程進(jìn)行實(shí)時(shí)映射,對(duì)采礦系統(tǒng)各設(shè)備及人員進(jìn)行智能管理與調(diào)度,預(yù)測危險(xiǎn)狀況并輔助生成解決方案,操作人員下達(dá)的指令可先行在數(shù)字孿生系統(tǒng)中得到驗(yàn)證,避免人為因素引起的作業(yè)事故發(fā)生;
3)采礦過程結(jié)束后:依據(jù)采礦過程中的實(shí)時(shí)數(shù)據(jù),重新模擬、分析采礦作業(yè)過程,發(fā)現(xiàn)操作不當(dāng)之處,進(jìn)行采礦方案二次優(yōu)化。
2 深海采礦動(dòng)態(tài)數(shù)字孿生系統(tǒng)開發(fā)
深海采礦是在復(fù)雜海洋環(huán)境中作業(yè)的大型復(fù)雜海洋工程作業(yè)系統(tǒng)。建立滿足其工程作業(yè)監(jiān)控及控制的動(dòng)態(tài)數(shù)字孿生系統(tǒng)也是一個(gè)復(fù)雜的系統(tǒng)工程。深海采礦動(dòng)態(tài)數(shù)字孿生系統(tǒng)開發(fā)流程可分為4步:數(shù)據(jù)采集與處理、數(shù)字化建模、功能實(shí)現(xiàn)、智能作業(yè)。具體流程如圖3所示。
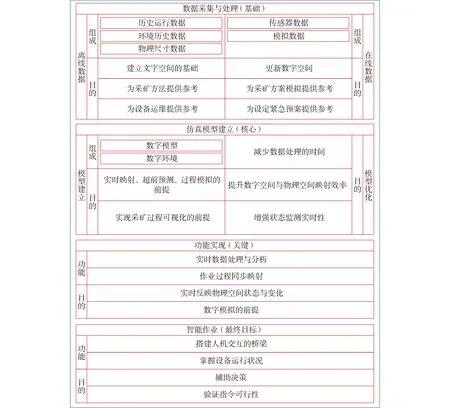
圖3 深海采礦動(dòng)態(tài)數(shù)字孿生系統(tǒng)開發(fā)流程Fig.3 Development process of dynamic digital twin system of deep-sea mining
本文使用Unity 3D引擎開發(fā)基于狀態(tài)診斷的深海采礦動(dòng)態(tài)數(shù)字孿生系統(tǒng)。該引擎是一款由Unity Technologies公司開發(fā)的3D引擎。該引擎具有強(qiáng)大的通用性、較低的開發(fā)成本、逼真的視覺畫面、便捷的人機(jī)交互性、支持多平臺(tái)發(fā)布,且腳本語言書寫方便等特點(diǎn),廣泛應(yīng)用于游戲開發(fā)、建筑可視化、實(shí)時(shí)三維動(dòng)畫等應(yīng)用[11]。
2.1 深海采礦系統(tǒng)數(shù)字化建模
深海采礦系統(tǒng)數(shù)字化模型包含深海采礦技術(shù)裝備數(shù)字化模型與作業(yè)環(huán)境數(shù)字化模型。深海采礦技術(shù)裝備數(shù)字化模型要求可以準(zhǔn)確反映物理實(shí)體形狀尺寸、物理屬性與機(jī)械性能等信息;作業(yè)環(huán)境數(shù)字化模型要求準(zhǔn)確反映采礦作業(yè)環(huán)境風(fēng)浪、海底地形等信息。當(dāng)接收到物理空間實(shí)時(shí)數(shù)據(jù)后,可將數(shù)據(jù)存入數(shù)據(jù)庫的同時(shí),在數(shù)字孿生系統(tǒng)界面進(jìn)行數(shù)據(jù)顯示,并使用數(shù)據(jù)驅(qū)動(dòng)數(shù)字化模型,對(duì)物理空間進(jìn)行實(shí)時(shí)映射,實(shí)現(xiàn)物理空間與數(shù)字空間深度融合,監(jiān)控與管理采礦系統(tǒng)作業(yè)過程。目前國內(nèi)深海采礦仍處于海上試驗(yàn)階段,本文結(jié)合海試系統(tǒng)要求,主要對(duì)作業(yè)環(huán)境,采礦裝備包括采礦船、采礦車、中繼站、立管及輸送軟管系統(tǒng)運(yùn)動(dòng)和位移狀態(tài)開展了動(dòng)態(tài)數(shù)字孿生構(gòu)建工作,如圖4所示。
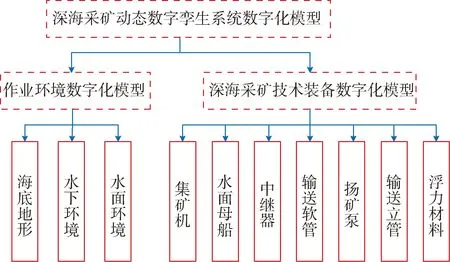
圖4 深海采礦系統(tǒng)數(shù)字模型Fig.4 Digital model of deep-sea mining system
2.1.1 數(shù)字環(huán)境搭建
作業(yè)環(huán)境數(shù)字化模型包括真實(shí)的海底地形、波高與波頻可動(dòng)態(tài)調(diào)整的水面環(huán)境以及有擾動(dòng)效果的水下場景。本文海底地形數(shù)字化模型構(gòu)建過程為確定作業(yè)區(qū)域后,采集該區(qū)域海底散點(diǎn)高程數(shù)據(jù),由于數(shù)據(jù)密度有限,本文采用雙調(diào)和樣條插值加密生成地形模型。該插值方法的原理是使用已知的局部數(shù)據(jù)點(diǎn)反演未知數(shù)據(jù)點(diǎn)信息,用局部解代替全局解,解決了大量數(shù)據(jù)集插值計(jì)算效率低的問題[12]。原理如下:
離散數(shù)據(jù)擬合可表示為:
Z(x)=φ(x1,x2,…,xn)
(1)
簡寫為:
Zj=φ(xj),j=1,2,…,n
(2)
式中:x1,x2,…,xn為采樣點(diǎn)x的n維坐標(biāo)數(shù);Z(x)為采用點(diǎn)x的數(shù)值;φ為映射關(guān)系。
對(duì)式(1)兩邊建立雙調(diào)和方程,可表示為:
(3)
式中:▽4為雙調(diào)和操作符;Wj為加權(quán)數(shù);δ為采樣函數(shù)。
方程(3)通解為:

(4)
式中Gm為m維雙調(diào)和格林函數(shù)。
將式(2)代入式(4),得到
(5)
因此,可根據(jù)式(5)任意輸入坐標(biāo)點(diǎn)xi計(jì)算出該點(diǎn)插值結(jié)果。通過插值計(jì)算得到海底地形三維模型如圖5所示。

圖5 海底地形三維模型Fig.5 3D digital model of seabed terrain
2.1.2 深海采礦裝備建模
深海采礦裝備數(shù)字化建模包括對(duì)水面母船、中繼器、集礦機(jī)、揚(yáng)礦泵、立管、輸送軟管以及浮力材料等技術(shù)裝備進(jìn)行數(shù)字空間映像。數(shù)字化模型要求可準(zhǔn)確反映各類裝備幾何尺寸、表面材質(zhì)、物理屬性、機(jī)械性能等多個(gè)尺度的屬性。系統(tǒng)先進(jìn)行初步計(jì)算得到初始狀態(tài)。當(dāng)動(dòng)態(tài)數(shù)字孿生系統(tǒng)接收到物理空間實(shí)時(shí)數(shù)據(jù),可在用戶界面顯示數(shù)據(jù)的同時(shí),驅(qū)動(dòng)數(shù)字化模型運(yùn)動(dòng),對(duì)數(shù)字化模型不斷更新,實(shí)現(xiàn)采礦作業(yè)過程實(shí)時(shí)映射。深海采礦技術(shù)裝備數(shù)字化模型如圖6所示。
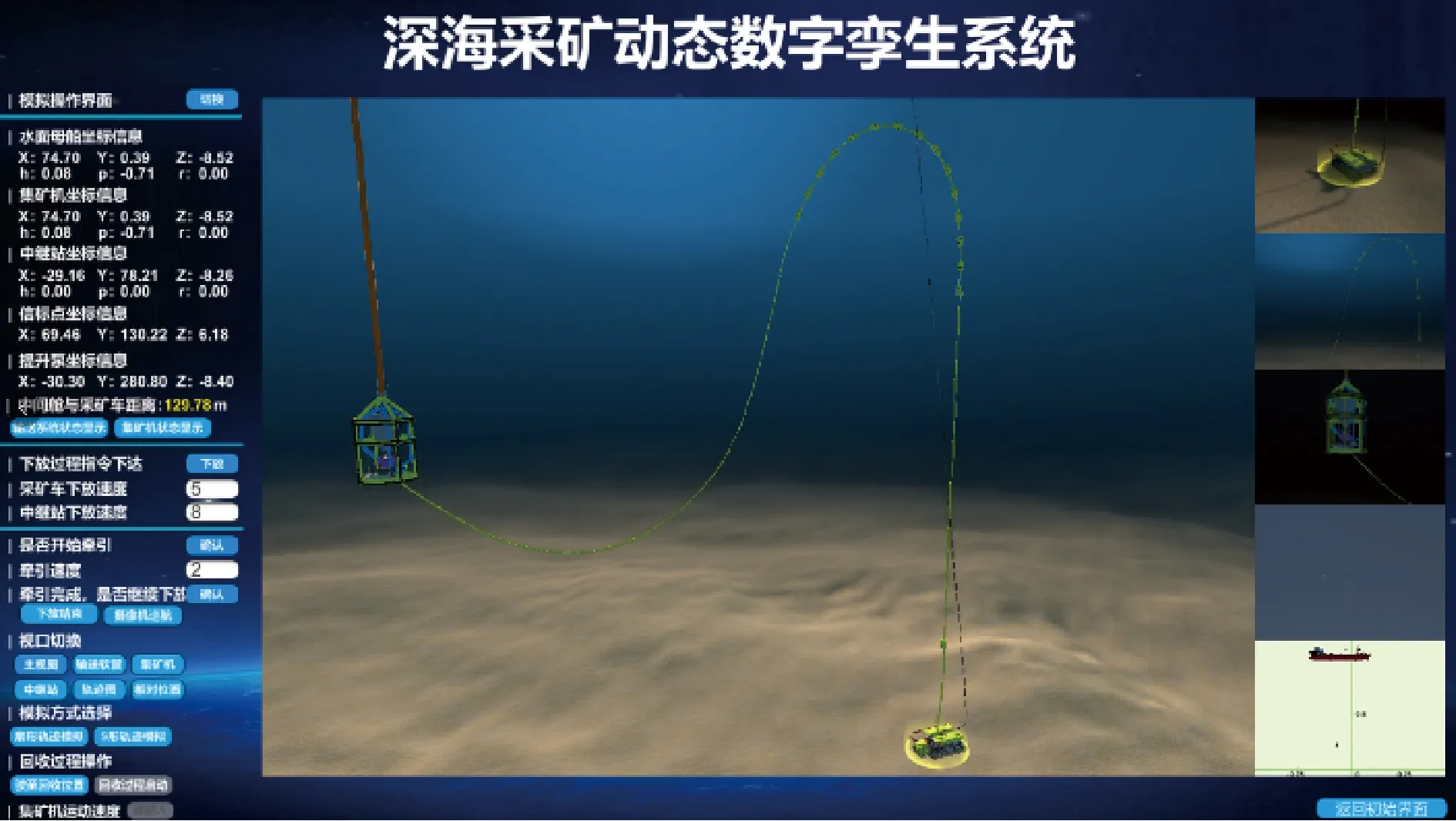
圖6 深海采礦裝備系統(tǒng)動(dòng)態(tài)數(shù)字孿生模型Fig.6 Dynamic digital twin system for deep-sea mining system
2.2 動(dòng)態(tài)數(shù)字孿生模型參數(shù)預(yù)設(shè)
數(shù)字孿生模型的參數(shù)預(yù)設(shè)是對(duì)裝備模型及系統(tǒng)運(yùn)動(dòng)狀態(tài)的參數(shù)化設(shè)置,通過使用物理模型信息數(shù)據(jù)的采集和對(duì)數(shù)字模型參數(shù)的同步更新,可以實(shí)現(xiàn)對(duì)數(shù)字化空間動(dòng)態(tài)映射。是動(dòng)態(tài)數(shù)字孿生系統(tǒng)構(gòu)建的關(guān)鍵步驟。本文深海采礦數(shù)字孿生系統(tǒng)主要采用如下參數(shù)進(jìn)行定義。
2.2.1 主要設(shè)備運(yùn)功功能預(yù)設(shè)
水面母船A型架對(duì)集礦機(jī)進(jìn)行起吊,轉(zhuǎn)動(dòng)過程通過油缸活塞伸縮驅(qū)動(dòng)實(shí)現(xiàn)。首先對(duì)油缸添加關(guān)節(jié)約束,給定油缸活塞伸長量,驅(qū)動(dòng)A型架轉(zhuǎn)動(dòng)。通過輸入活塞伸長量控制A型架運(yùn)動(dòng)邏輯判斷如圖7所示。
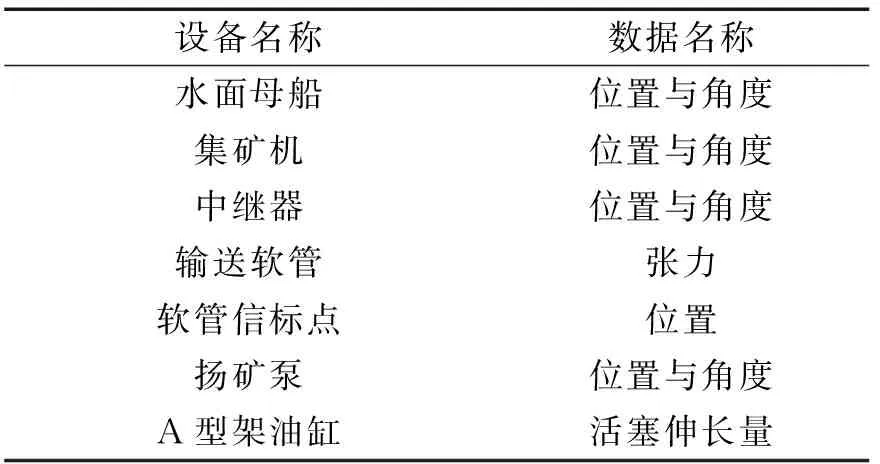
表1 深海采礦數(shù)字孿生系統(tǒng)主要參數(shù)Table 1 Deepsea mining digital twin system parameters
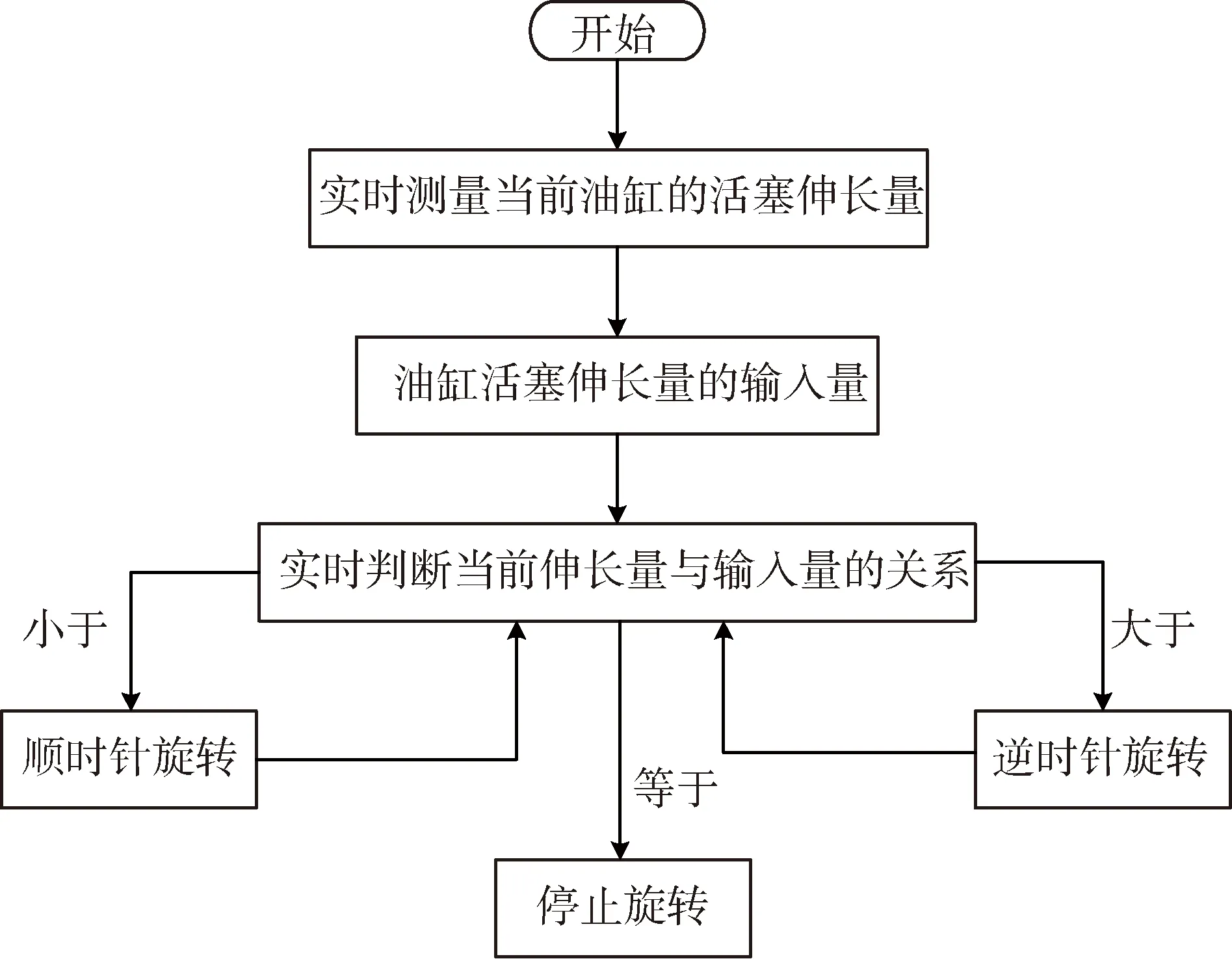
圖7 A型架運(yùn)動(dòng)邏輯判斷Fig.7 Logic judgment diagram of A-frame movement
集礦機(jī)運(yùn)動(dòng)通過履帶轉(zhuǎn)動(dòng)實(shí)現(xiàn),因此在給定集礦機(jī)運(yùn)動(dòng)速度時(shí),履帶要根據(jù)運(yùn)動(dòng)速度進(jìn)行轉(zhuǎn)動(dòng),并在海底地形數(shù)字化模型上留下履帶駛過痕跡。
對(duì)履帶轉(zhuǎn)動(dòng)過程預(yù)制動(dòng)畫,當(dāng)給定集礦機(jī)運(yùn)動(dòng)速度后,根據(jù)運(yùn)動(dòng)速度以及運(yùn)動(dòng)方向調(diào)整動(dòng)畫播放速度以及播放順序,模擬集礦機(jī)運(yùn)動(dòng)過程中履帶轉(zhuǎn)動(dòng)效果。集礦機(jī)運(yùn)動(dòng)效果如圖8所示。
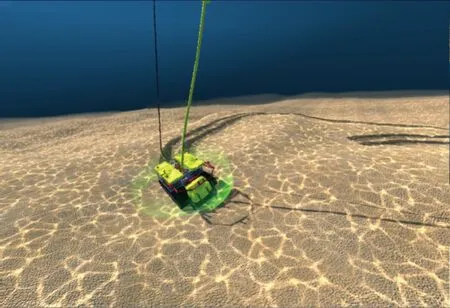
圖8 集礦機(jī)運(yùn)動(dòng)效果Fig.8 Movement effect diagram of mining collector
2.2.2 輸送軟管線型模擬
集礦機(jī)采集到的礦物通過輸送軟管輸送至中繼器,因此輸送軟管狀態(tài)對(duì)采礦過程安全性至關(guān)重要。由于技術(shù)及成本原因,采礦系統(tǒng)只能布置兩個(gè)信標(biāo)點(diǎn)對(duì)軟管狀態(tài)進(jìn)行監(jiān)測,需要結(jié)合數(shù)值分析方法求解懸鏈線方程確定軟管整體線型及位置狀態(tài)。
本文采礦軟管懸鏈線方程推導(dǎo)過程如下:設(shè)輸送軟管質(zhì)量均勻,單位長度質(zhì)量為ω0,且處于平衡狀態(tài)。取輸送軟管上任意一點(diǎn)A(x,y(x))以及附近一點(diǎn)B(x+Δx,y(x+Δx)),其中Δx→0,A點(diǎn)所受張力為T(x),B點(diǎn)所受張力為T(Δx),設(shè)AB段長度為dl,則:
d2l=d2x+d2y
(6)
輸送軟管處于平衡狀態(tài),故合外力為0,則B點(diǎn)垂直張力為:
Ty(x+Δx)=Ty(x)+ω0dl
(7)
其中Ty(x)為A點(diǎn)所有垂直張力。A點(diǎn)與B點(diǎn)水平張力滿足:
Tx(x)=Tx(x+Δx)=k
(8)
將式(15)代入式(16),得:
(9)
則:
(10)
即:
(11)
由于AB段長度趨于0,力的方向與AB段線形方向相同,故:
(12)
將式(11)代入式(12),得:
(13)
兩邊積分同時(shí)對(duì)x,得:
(14)
2.3 物理空間實(shí)時(shí)數(shù)據(jù)采集與處理
物理空間實(shí)時(shí)數(shù)據(jù)采集內(nèi)容主要包括深海采礦系統(tǒng)各子系統(tǒng)運(yùn)行數(shù)據(jù),如集礦機(jī)及水面母船行駛速度、母船A型架油缸伸長量、輸送軟管信標(biāo)點(diǎn)位置坐標(biāo)、中繼器位置坐標(biāo)、各類報(bào)警器狀態(tài)等。通過實(shí)時(shí)數(shù)據(jù)對(duì)數(shù)字化模型進(jìn)行驅(qū)動(dòng)控制,實(shí)現(xiàn)在數(shù)字空間對(duì)物理空間進(jìn)行實(shí)時(shí)映射。
深海采礦動(dòng)態(tài)數(shù)字孿生系統(tǒng)使用OPC UA (OPC unified architecture)統(tǒng)一架構(gòu)接口協(xié)議進(jìn)行數(shù)據(jù)傳輸。傳感器采集的設(shè)備運(yùn)行數(shù)據(jù)通過局域網(wǎng)傳輸至服務(wù)器,當(dāng)動(dòng)態(tài)數(shù)字孿生系統(tǒng)運(yùn)行時(shí),系統(tǒng)作為客戶端,與服務(wù)器建立連接,接收數(shù)據(jù)并進(jìn)行解析,解析的數(shù)據(jù)發(fā)送至內(nèi)存緩沖區(qū)的同時(shí)數(shù)據(jù)庫中進(jìn)行存儲(chǔ)。系統(tǒng)在緩沖區(qū)中讀取數(shù)據(jù),驅(qū)動(dòng)相應(yīng)的數(shù)字模型,實(shí)現(xiàn)實(shí)時(shí)映射的效果。
OPC UA接口協(xié)議通用性好、集成性高、通訊性能優(yōu)越,保證了數(shù)據(jù)傳輸?shù)目煽啃耘c安全性。因此,極大提升了數(shù)字孿生系統(tǒng)運(yùn)行的穩(wěn)定性與準(zhǔn)確性。
3 深海采礦動(dòng)態(tài)數(shù)字孿生系統(tǒng)運(yùn)行
深海采礦動(dòng)態(tài)數(shù)字孿生系統(tǒng)是一個(gè)以數(shù)據(jù)為紐帶,連接各子系統(tǒng),使其緊密配合聯(lián)動(dòng)的系統(tǒng)。所有數(shù)據(jù)各子系統(tǒng)共享,形成一個(gè)完整的信息閉環(huán),實(shí)現(xiàn)了不同數(shù)據(jù)源的數(shù)據(jù)實(shí)時(shí)高效流通,避免產(chǎn)生數(shù)據(jù)孤島。系統(tǒng)運(yùn)行流程如圖9所示。
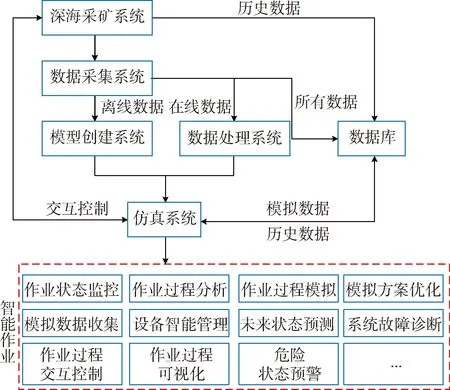
圖9 深海采礦動(dòng)態(tài)數(shù)字孿生系統(tǒng)運(yùn)行流程Fig.9 Operation process of dynamic digital twin system of deep-sea mining
1)通過數(shù)據(jù)采集系統(tǒng),得到深海采礦系統(tǒng)全部數(shù)據(jù),數(shù)據(jù)可為2類,即離線數(shù)據(jù)與在線數(shù)據(jù)。離線數(shù)據(jù)即采礦設(shè)備物理屬性與幾何尺寸,是構(gòu)建數(shù)字空間的基礎(chǔ);在線數(shù)據(jù)即設(shè)備運(yùn)行數(shù)據(jù)與環(huán)境信息,記錄物理空間在時(shí)間尺度上的狀態(tài)信息。
2)將數(shù)據(jù)采集系統(tǒng)中的所有數(shù)據(jù)傳遞至數(shù)據(jù)庫中,作為數(shù)字化建模、實(shí)時(shí)映射、采礦方案制訂以及采礦過程重演的重要依據(jù)。將離線數(shù)據(jù)傳遞至模型創(chuàng)建系統(tǒng),用于生成與物理空間完全一致的數(shù)字空間;將在線數(shù)據(jù)傳遞至數(shù)據(jù)處理系統(tǒng),對(duì)關(guān)鍵數(shù)據(jù)進(jìn)行處理分析,去除雜項(xiàng)數(shù)據(jù)與異常數(shù)據(jù),提高數(shù)據(jù)采集準(zhǔn)確性。
3)數(shù)字化模型與處理完畢的實(shí)時(shí)數(shù)據(jù)在仿真系統(tǒng)中進(jìn)行深度融合,實(shí)現(xiàn)數(shù)字空間對(duì)物理空間的實(shí)時(shí)映射、狀態(tài)預(yù)測及對(duì)采礦設(shè)備交互控制,實(shí)現(xiàn)深海采礦系統(tǒng)數(shù)字化、可視化、智能化運(yùn)行。
由于深海采礦尚未開展實(shí)際生產(chǎn)作業(yè),本文開發(fā)的深海采礦動(dòng)態(tài)數(shù)字孿生系統(tǒng)在實(shí)驗(yàn)中進(jìn)行了測試與應(yīng)用。現(xiàn)場實(shí)驗(yàn)中動(dòng)態(tài)數(shù)字孿生系統(tǒng)控制與顯示臺(tái)如圖10所示。

圖10 動(dòng)態(tài)數(shù)字孿生系統(tǒng)實(shí)際操作與顯示工作臺(tái)Fig.10 Control console of dynamic digital twin system of deep-sea mining
動(dòng)態(tài)數(shù)字系統(tǒng)實(shí)現(xiàn)了對(duì)深海采礦全系統(tǒng)近200余項(xiàng)數(shù)據(jù)的實(shí)時(shí)采集與處理,并對(duì)數(shù)據(jù)進(jìn)行同步顯示,對(duì)異常狀態(tài)進(jìn)行報(bào)警提示。同時(shí),驅(qū)動(dòng)水下作業(yè)車、支持船、中繼器、輸送軟管等數(shù)字化模型運(yùn)動(dòng),實(shí)時(shí)更新數(shù)字孿生模型狀態(tài),實(shí)現(xiàn)系統(tǒng)作業(yè)過程三維動(dòng)態(tài)顯示,為設(shè)備操作提供了直觀、準(zhǔn)確的視覺參考。系統(tǒng)數(shù)據(jù)每0.02 s新一次,保證了狀態(tài)監(jiān)控的實(shí)時(shí)性,提高了系統(tǒng)的安全性與作業(yè)效率。
4 結(jié)論
1)深海采礦數(shù)字孿生系統(tǒng)開發(fā)過程包括數(shù)字化建模、數(shù)字模型運(yùn)動(dòng)功能實(shí)現(xiàn)、用戶界面開發(fā)、數(shù)據(jù)采集與處理以及系統(tǒng)實(shí)驗(yàn)應(yīng)用。
2)動(dòng)態(tài)數(shù)字孿生系統(tǒng)可以結(jié)合機(jī)器學(xué)習(xí)、強(qiáng)化學(xué)習(xí)、神經(jīng)網(wǎng)絡(luò)等技術(shù),對(duì)設(shè)備運(yùn)行狀態(tài)進(jìn)行仿真與預(yù)測,實(shí)現(xiàn)系統(tǒng)整體狀態(tài)智能監(jiān)控、風(fēng)險(xiǎn)預(yù)警、數(shù)字化運(yùn)維,將在未來的深海采礦工程及相關(guān)的海洋工程作業(yè)中發(fā)揮重要作用。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
井岡教育(2022年2期)2022-10-14 03:11:44
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:00
中學(xué)生數(shù)理化·中考版(2017年12期)2017-04-18 12:55:05
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
故事大王(2016年7期)2016-09-22 17:30:08
中學(xué)生(2015年2期)2015-03-01 03:43:33