6G車聯網中的通感算融合:現狀與挑戰
2023-02-09 12:25:54董夢圓付宇釧牛曉健
無線電通信技術 2023年1期
董夢圓,付宇釧*,牛曉健
(1.西安電子科技大學 綜合業務網理論及關鍵技術國家重點實驗室,陜西 西安 710071;2.西安電子科技大學 智慧交通研究院,陜西 西安710071)
0 引言
未來的6G將在5G的基礎上進一步增強帶寬、拓展連接,支持智能交通系統的進一步發展[1]。中國聯通 5G-A 通感算融合技術白皮書V3.0[2]指出5G即5G for Sensing 階段,通過結合算力的通信感知融合實現感知增強,6G階段為Sensing for 6G階段,進一步實現感知對通信的反哺增強,實現網絡質量和利用率提升。中國通信學會在《通感算一體化網絡前沿報告》指出[3]:未來的6G將感知-通信-計算融合,旨在實現利用通信、計算輔助感知增強;利用感知、計算輔助通信增強;感知增強與通信增強進一步輔助計算增強。面向6G,未來車聯網系統有望將通信、感知和計算資源融合起來,實現一種超靈活、智能的網絡運行機制,為智能交通領域提供更高的數據速率(100 Gbit/s~1 Tbit/s)、極低的端到端延遲(<1 ms)以及極高的端到端可靠性(99.999 99%)。
為了滿足高可靠低時延的任務處理需求與網絡中有限的通信、計算資源之間的矛盾,研究者們致力于有效協同網絡中的通信、計算資源,利用車聯網中的V2X通信技術鏈接網絡中分散的計算資源,實現計算增強;面對帶寬限制,將計算資源部署于數據附近,從而減少傳輸數據量,有效減輕通信負載,實現通信增強。雖然通信-計算融合可以在一定程度上促進車聯網的發展,但不足以滿足無人駕駛對高可靠低時延的極致需求,因此,探究將車聯網中感知-通信-計算三者深度融合可進一步提高系統的感知準確性、通信吞吐量和計算效率。
6G車聯網中的感知-通信-計算融合將滿足智能交通對于超低時延、超高可靠、超高速率、高精度感知和廣泛覆蓋的要求。基于通信-計算融合,車聯網感知-通信-計算三者融合有望通過通算融合感知,提供先驗信息,實現資源互通;感知融合通算,擴展感知深度,實現感知增強。未來車聯網通感通過資源互通,結合人工智能技術對異構業務需求解耦與資源解耦,實現精準自適應資源分配,有效實現通信增強、感知增強和計算增強。
1 車聯網通信和計算技術的發展
隨著科技的不斷進步,車輛的智能化給人們的出行帶來極大的便利,自動駕駛成為近年來研究的熱門話題。而單車智能由于其感知范圍、感知精度與計算能力的限制,面對高動態的車輛環境,無法滿足車輛對高可靠低時延的需求。隨著5G、6G通信技術與邊緣計算技術的發展,大量學者開始研究將通信、計算融合,通過協同共享環境信息并充分利用道路上的計算資源來適應高動態車聯網環境下的應用需求。
研究人員在車聯網通信和計算方面進行了長期研究。車聯網中的三種通信模式為車車通信(Vehicle to Vehicle, V2V)、車與路側基礎設施通信(Vehicle to Infrastructure, V2I)以及車與行人通信(Vehicle to Pedestrian, V2P)[4]。自動駕駛隨著5G的普及迎來了快速發展時期,但車聯網賦能的自動駕駛仍無法實現真正的大規模普及,6G旨在促進無線通信技術的進一步發展,提供比5G更高的性能,滿足不同場景的業務需求。車聯網中離散分布的計算資源主要包含本地計算、邊緣計算和云計算。本地計算資源即來自于車輛的計算資源,更靠近于數據源,但是數據處理能力不足;邊緣計算資源即靠近數據源的網絡邊緣側的計算資源,距離數據源有一定距離,計算能力較強;云計算資源即云端數據中心,遠離數據源,計算能力強。三種計算資源的計算特性比較如表1所示。
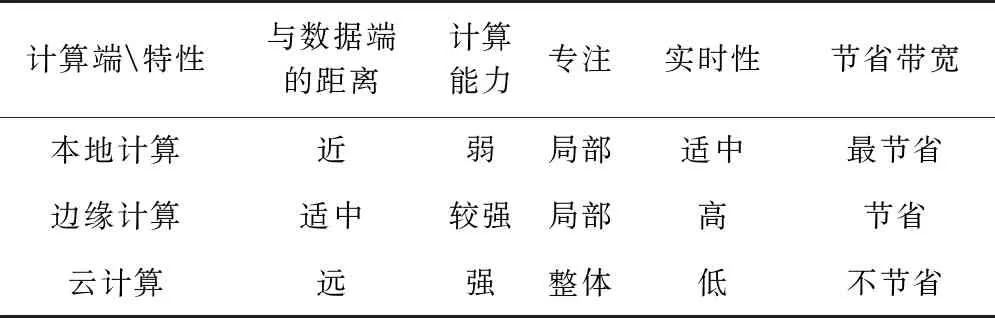
表1 計算特性對比
2 車聯網通信-計算融合架構及需求
車聯網中通信-計算融合架構如圖1所示。其中智能車輛可實現采集數據的全部或部分處理,以實時執行駕駛決策,通過通信層實現數據共享或數據卸載至計算層,一方面可實現感知范圍的擴展與感知精度的提高;另一方面可實現數據的分布式高效處理,保證信息有效性。
圖1中,車聯網中應用層包含自動駕駛、高精度地圖構建等,不同的應用對時延的需求不同。網絡通信是服務于車聯網中應用的關鍵媒介。通信層的基本思想是建立穩定的互連與信息交換傳輸信道,保證車輛網絡信息傳輸的可靠性與有效性。通信層一般包含兩個基本技術,即網絡接入技術與信息傳輸技術,網絡接入技術可提供實時的異構網絡接入;信息傳輸技術為接入資源自適應分配網絡帶寬,平衡網絡負載[5]。計算層是服務于車聯網中應用的關鍵手段。其基本思想是增強網絡計算能力,為車輛網絡中的海量數據有效處理提供保障,保證行車安全、提高駕駛舒適度。
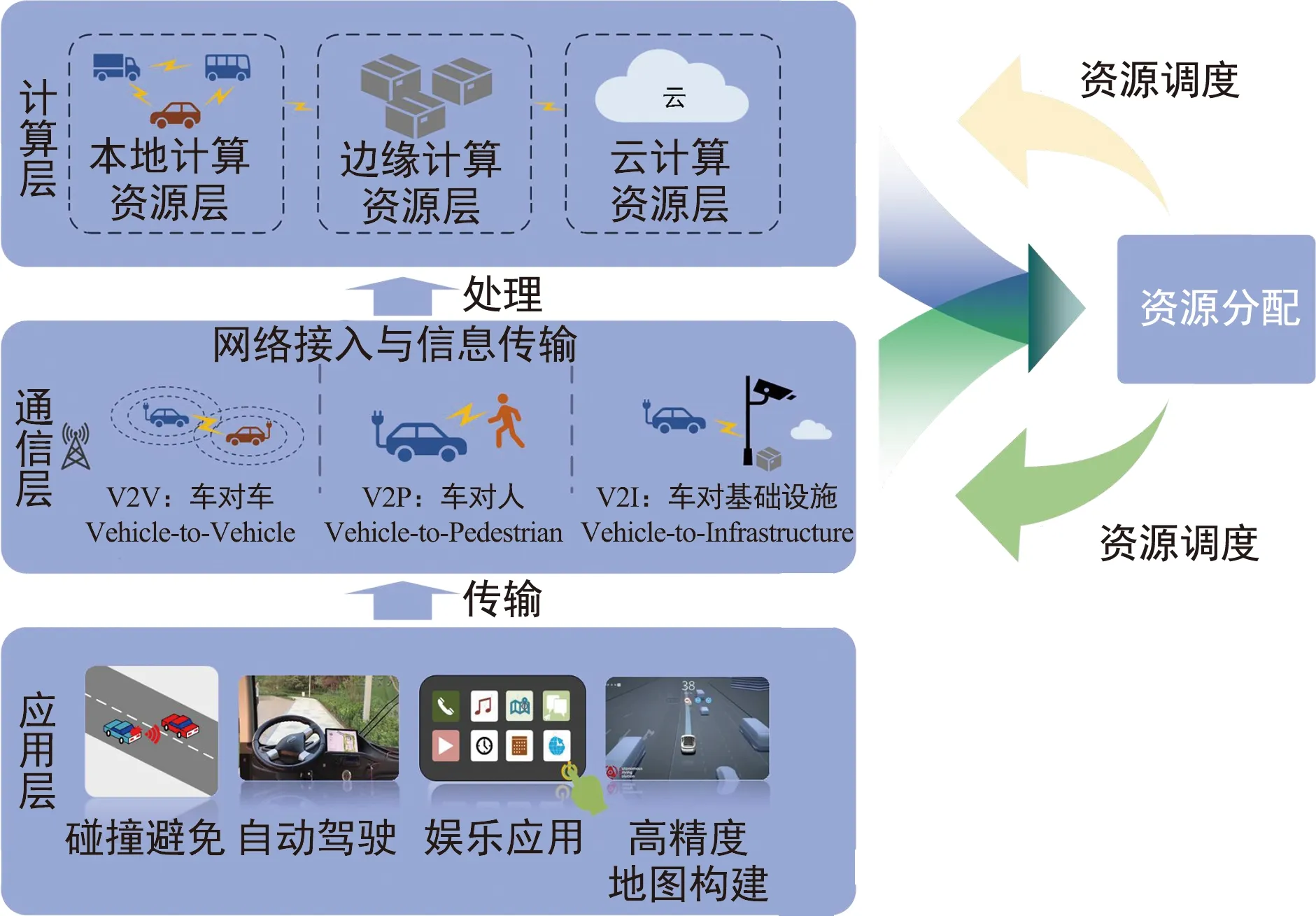
圖1 車聯網通信-計算融合系統架構
為實現通信與計算的進一步融合,需要設計新的信息傳輸處理協議及相應系統架構,以滿足計算密集型任務的高效處理需求。因此需要考慮針對不同的場景,設計低成本、低復雜度和高效率的通信-計算融合新系統架構。
車聯網通信-計算融合系統架構設計需要考慮系統實現的功能與實際的場景,避免潛在的設計缺陷。第一,系統應擁有適當的移動管理策略與接入控制策略,面對車輛網絡的動態性仍能保證高效運行,保證網絡鏈路的穩定性;第二,面對異構業務需求,系統能針對業務等級,保證有效的協調處理;第三,網絡中通信和計算資源有限,系統應設計資源分配策略,保證網絡資源的有效利用并滿足任務處理需求;第四,為了保護用戶的隱私安全,系統需要保證信息傳輸的安全可靠性。分別從車輛移動性、多差分業務需求、通信-計算資源有限性和隱私安全四個方面確保系統架構的高效性與魯棒性。
3 車聯網通信-計算融合關鍵技術
3.1 基于任務執行的通信-計算融合
面對來自網絡中的計算密集型任務需求,基于任務執行的通信-計算融合通過通信技術鏈接車輛網絡中車輛端、邊緣端及云端計算資源,加快任務處理進程,實現任務執行成功率、延遲等的提升。其基于任務是否可以劃分為全部任務卸載與部分任務卸載。本節分別從全部任務卸載和部分任務卸載對相關研究進行綜述。
3.1.1 全部任務卸載
車聯網中高度集成的任務或者相對簡單的任務是不可分割的,可以選擇在本地車輛上執行或者全部卸載到其他計算設備,全部卸載模型如圖2所示。當任務決定在本地執行時,由本地計算資源對該任務進行處理,任務處理時延主要由本地計算能力決定,能量消耗主要為計算處理消耗[6]。由于車輛網絡的動態性,車輛通信性能受到嚴重影響,相關研究[7-11]針對車輛移動性,對卸載決策進行優化。其中多以減少任務執行延遲和降低能耗為優化目標,對車輛移動造成的通信信道影響[7-8]、切換影響[9-10]、多跳鏈路穩定性[11]等進行研究,通過聯合優化通信的傳輸功率及上傳時間、計算的卸載決策和本地CPU頻率,提高車輛網絡中的通信與計算能力。
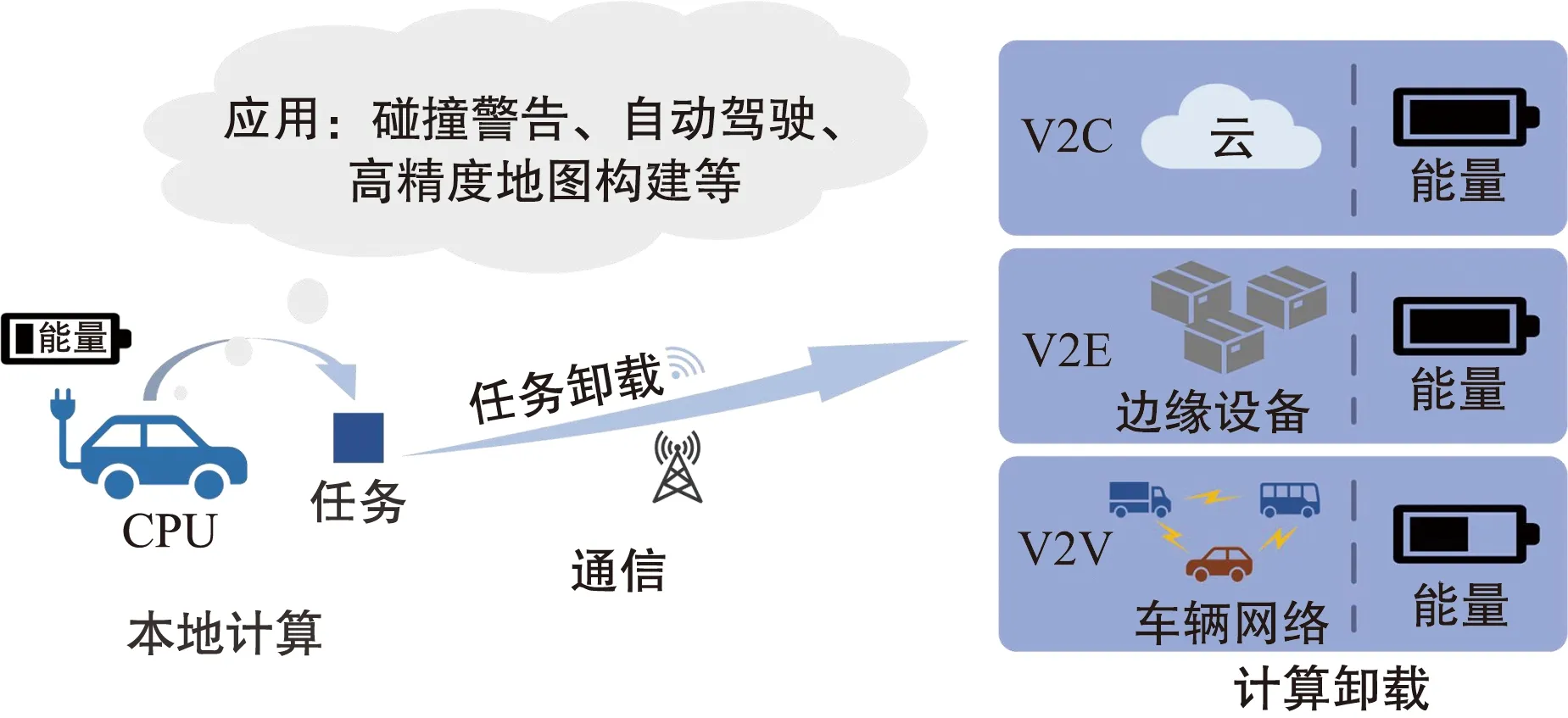
圖2 全部卸載模型
3.1.2 部分任務卸載
部分卸載要求任務可以劃分為獨立的子任務,將劃分好的子任務分配給網絡中的計算設備,通過分布式計算,更能充分利用網絡中的計算資源。如圖3所示,部分卸載一般通過網絡狀態制定卸載決策,決定任務劃分比率,將任務劃分為一系列子任務,借助通信技術將子任務下發給網絡中其他計算設備協同處理。
任務的執行時間由以上幾個部分組成,如圖4所示。部分卸載的研究更能靈活地處理數據量大和延遲敏感的應用。文獻[12-14]針對車輛移動性造成的網絡不穩定問題,對卸載決策及傳輸策略進行優化。其中文獻[12]通過設置7種卸載模式,證明了協作計算比獨立計算能達到更高的任務成功率及系統可靠性。為充分利用網絡中空閑的計算資源,文獻[15-16]研究了利用停放車輛的計算資源對任務執行延遲的影響,通過設計卸載方案,聯合優化卸載率、卸載決策及資源分配,降低任務執行延遲。

圖4 任務執行時間
綜上,可以看出任務卸載決策不僅取決于任務延遲要求和卸載數據的傳輸速率,也取決于車輛用戶的CPU頻率和傳輸功率。表2分別從研究目標、研究內容和計算協作方式對任務卸載相關研究進行了總結。
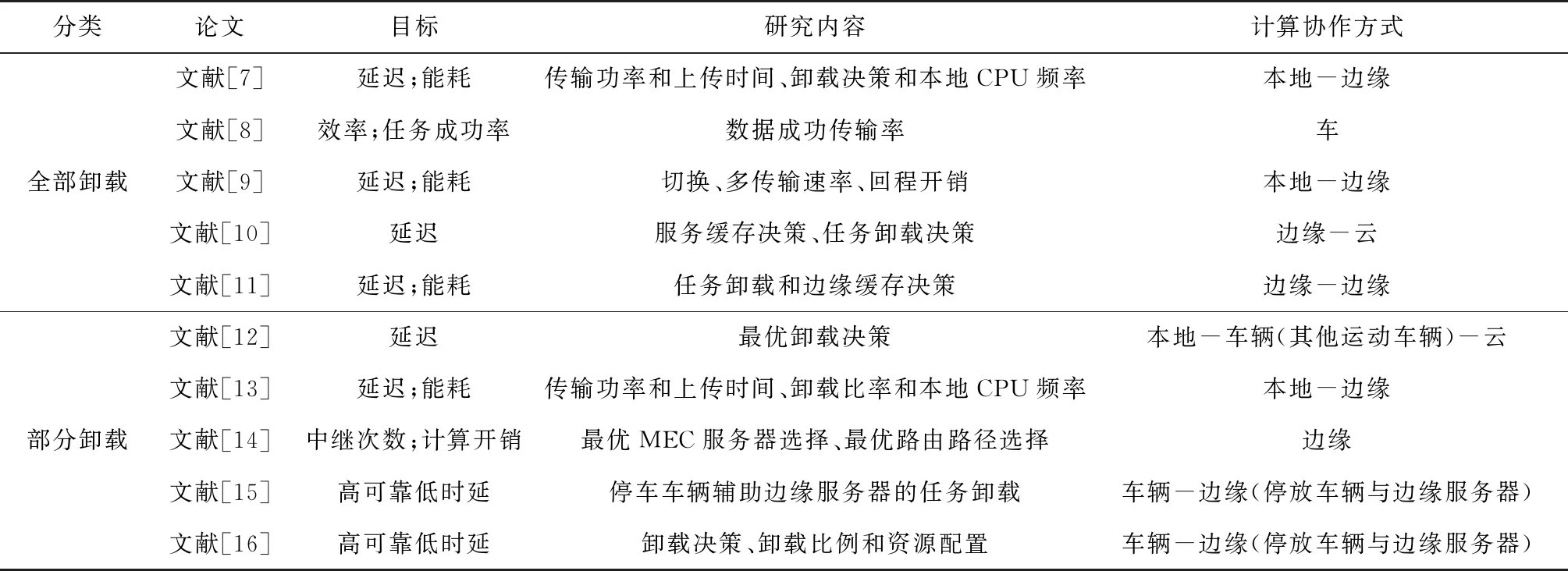
表2 基于任務執行的通信-計算融合相關工作性能比較
3.2 結合隱私保護的通信-計算融合
隨著自動駕駛的發展,由于車載計算能力的限制,車輛產生的海量數據傾向于卸載到路側計算設備協助計算,這種交互容易造成車輛的信息泄露,區塊鏈技術的引入可以提高車聯網中數據共享的可靠性,激勵車輛用戶進行信息共享,促進安全的通信-計算融合[17]。在任務卸載過程中存在的隱私問題主要有車輛位置信息泄露、用戶的卸載模式泄露、卸載過程中的內容信息泄露和卸載到不可信的邊緣服務器造成的隱私泄露等[18]。本文把隱私泄露風險分為基于任務卸載決策的隱私泄露與基于網絡特性的隱私泄露。
3.2.1 基于任務卸載決策的隱私泄露
通過對信道狀態的有效把握,任務卸載將傾向于在信道狀態良好的情況下進行[11];另外由于車輛的移動,容易造成計算設備的切換,車輛需要進行數據的轉移[17];信道的通信質量受通信距離的影響,直接通信范圍內數據傳輸成功率更高[8]。以上可以總結出任務卸載的一些偏好,比如更傾向于距離近的計算設備和信道狀態較好的情況。攻擊者利用這些卸載偏好來進行信息的竊取,文獻[19]針對多智能體強化學習方法的隱私漏洞存在卸載偏好攻擊,攻擊者誘導用戶將任務卸載給惡意的RSU;為了避免這種傾向,文獻[20]針對信息不完全的場景,通過結合區塊鏈和機器學習優勢互補,實現隱私保護;針對用戶的計算設備切換行為,攻擊者可以推斷出用戶的行駛軌跡[21]等。針對邊緣設備上的推斷攻擊,文獻[22]使用Wald檢驗對推斷攻擊進行識別并揭示該設備存在的隱私風險。
3.2.2 基于網絡特性的隱私泄露
基于網絡特性的隱私泄露是由通信過程或計算設備的不可信產生的。通信的不可信體現在無線通信的廣播性質,容易有被攻擊者竊聽的風險,文獻[23-24]針對數據上傳過程中造成車輛的身份泄露問題,設置隱私保護機制,保護卸載過程中的位置等隱私信息;計算設備的不可信體現在邊緣設備容易被攻擊者攻擊,當用戶將多個隱私信息的任務卸載在同一個邊緣設備時,很容易造成隱私泄露,為此,文獻[25-26]將包含多個用戶隱私信息的數據分別卸載在不同邊緣設備上,很好地保護了用戶的隱私。在合作邊緣計算系統中,為了增強邊緣節點之間的信任,文獻[27]設計了一個基于區塊鏈的差分邊緣合作系統,保護隱私的同時也滿足了延遲敏感業務的延遲需求。
結合隱私保護的通信-計算融合相關工作性能比較如表3所示。
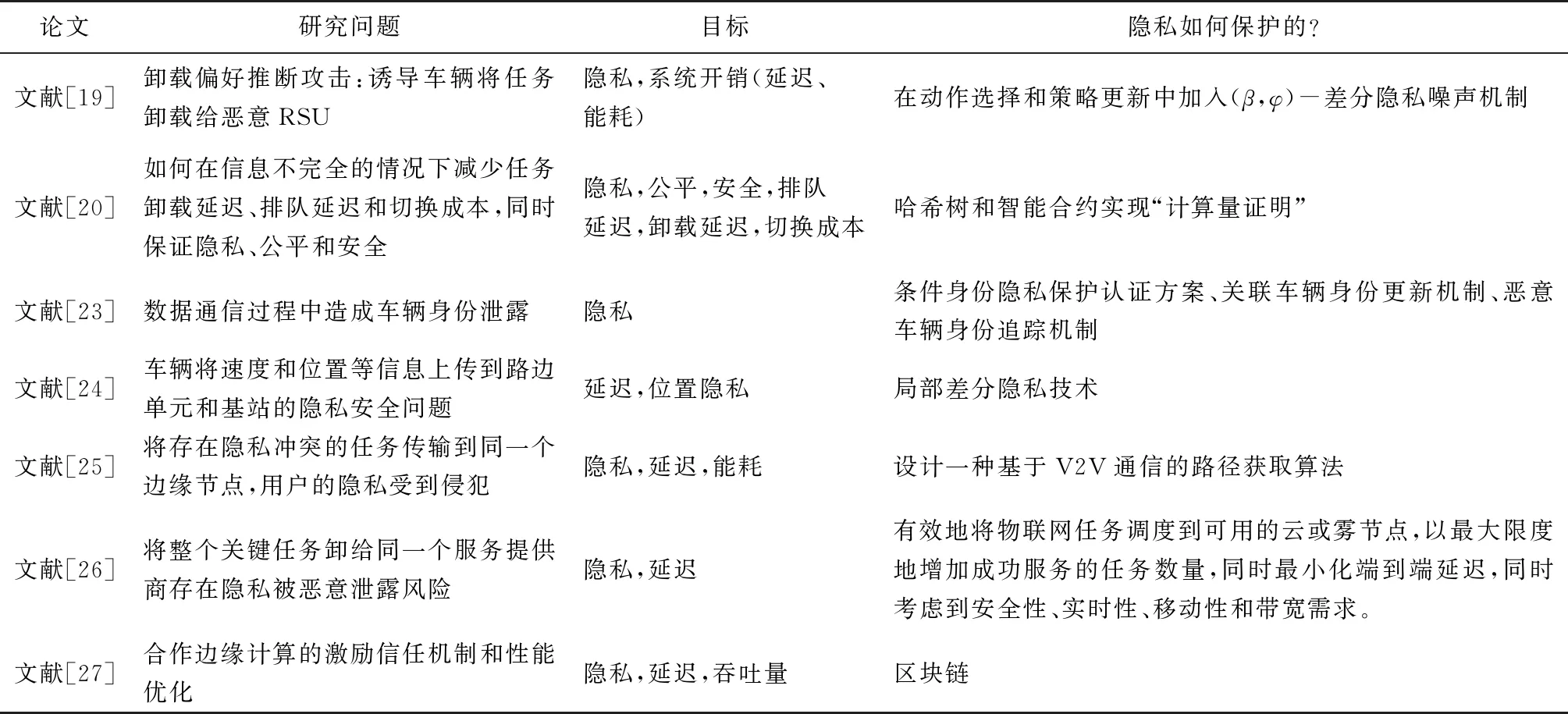
表3 結合隱私保護的通信-計算融合相關工作性能比較
3.3 基于網絡有限資源的聯合通信-計算資源分配
面對車輛的高移動性與復雜的環境,自動駕駛車輛行駛過程中激增的業務量與網絡中有限的通信和計算資源產生矛盾,不合理的資源分配將造成網絡的擁堵與資源浪費,嚴重影響交通安全。因此如何對網絡中有限的通信-計算資源進行高效分配,來滿足不同用戶的不同業務需求是需要解決的難題。
車聯網中資源分配的資源主要為計算資源、通信資源、存儲資源。計算資源通常指CPU頻率和內存。通信資源是指頻譜資源、信道帶寬及傳輸功率等。存儲資源是指一些設備的存儲空間資源,這些存儲空間用于緩存用戶請求率高的熱門內容,針對特定內容的請求,可直接將提前緩存好的內容交付給用戶,進一步減少計算和通信負擔。
針對聯合通信-計算的資源分配,文獻[28]考慮車聯網中激增的業務需求和有限的通信、計算資源的矛盾,聯合優化任務卸載決策、功率和帶寬資源分配、MEC任務分配、MEC的頻率比率,使系統的總能量消耗最小。文獻[29]利用車輛網絡中停放車輛的資源,提出一種端-邊-云協同通信與計算資源分配問題,減少任務的執行延遲。文獻[30]同時考慮無線通信鏈路能力和計算效率的約束,采用不同的無線接入技術,設計了一種車輛-道路-基站協同任務卸載體系結構,并分析了三種任務卸載方式:本地卸載、通過PC5接口的RSU卸載和通過Uu接口的BS卸載,利用強化學習實現最優的任務卸載和資源分配,最小化延遲并提高系統吞吐量。
由于交通環境的復雜性,網絡中源源不斷地產生來自不同車輛用戶的不同業務需求,然而不同的業務類型對任務延遲需求不同,對業務等級的有效劃分可以實現更精準的需求與資源匹配,表4總結了不同優先級的業務類型與其對應的延遲需求[31]。文獻[31-33]考慮了任務的優先級加權,專注于不同類型任務的資源分配問題,通過聯合優化信道分配和卸載決策,使優先級加權的任務總時延最小。
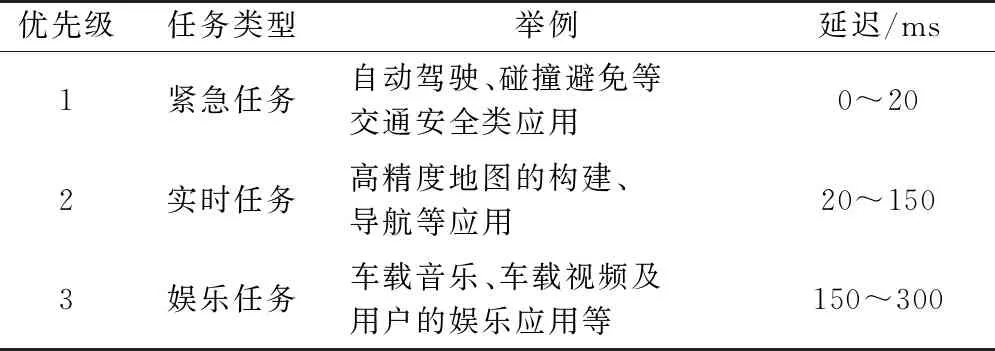
表4 不同應用優先級對比
緩存可以顯著提高系統容量,減少內容交付延遲,增大頻譜效率和能源效率。緩存單元可以部署在核心網絡、無線接入網絡和用戶設備上,通過在核心網絡上部署緩存單元,移動流量可減少1/3~2/3[34],文獻[35]針對有限的通信和計算資源,整合4C,即通信、本地計算、緩存、協作計算,提出了車輛邊緣計算中的通信-計算-緩存-協作計算系統架構。文獻[36]為了均衡有限資源與應用服務質量之間的矛盾,聯合分配部分計算卸載決策、社交內容緩存和無線電資源,實現系統效用最大化。文獻[10]使用強化學習方法優化資源分配與邊緣緩存決策,實現超過10%的平均服務延遲降低。文獻[37]考慮在邊緣端緩存流行軟件,通過優化聯合緩存、卸載和時間分配策略,以節省網絡的通信-計算資源。
綜上,分別從研究目標、研究內容、是否考慮業務等級以及是否考慮緩存對現有研究進行總結,如表5所示。

表5 基于聯合通信-計算資源分配相關工作性能比較
4 6G車聯網中的通感算融合
車聯網通信-計算融合的研究現狀表明通算融合可以在一定程度上滿足時延敏感型應用對高可靠和低時延的需求。但不足以滿足新興智能應用對極高可靠性、極低時延的極致需求,而6G車聯網中的通感算融合旨在增強資源互通,實現網絡資源協作增強,為解決上述問題提供了新思路。本節對車聯網感知-通信-計算的有效融合進行了探索,并分析了6G車聯網中的通感算融合的未來應用及面臨的挑戰。
4.1 6G車聯網中的通感算融合的探索
基于5G的NR-V2X標準已成功運用在車聯網領域,有效促進車輛編隊行駛、自動駕駛等技術的發展與進步。6G時代,將在5G網絡的基礎上顯著提升網絡性能。借助通信性能的提升,智能交通系統將得到進一步發展:基于空天地一體化通信技術實現全域覆蓋,促進安全可靠的無人駕駛技術的實現;基于通信感知集成技術,通信信號實現目標的精準感知,太赫茲通信技術和光通信技術將進一步增強對環境信息的感知與獲取,實現安全可靠的感知;支持區塊鏈的分布式網絡架構可進一步提高信息安全,實現安全可信的信息共享。
現有研究通過雷達通信一體化與邊緣計算協同,一定程度上融合了通感算資源。文獻[38]從聯合優化的角度探討通信、感知和計算的協調增益,將移動邊緣計算與通信-感知集成技術相結合,構建了感知-通信-計算融合實現框架。文獻[39]從車聯網感知-通信融合到感知-通信-計算融合探討了實現感知-通信-計算融合的理論難題和技術挑戰。另外,針對以環境數據作為輸入的應用,通過協調網絡中感知設備的選取與通信-計算資源的聯合分配,在一定程度上融合了通感算資源。其中文獻[40]針對車路協同感知場景,聯合分配感知塊信息、通信資源和計算資源,增強感知信息的時效性和降低信息處理的時延;文獻[41]針對任務卸載過程導致的高傳輸時延問題,提出一種自適應傳輸數據或計算指令的卸載方法,通過調配網絡中感知設備協同感知及通信計算資源的合理分配,減少傳輸資源的利用和任務處理時延。
綜上,6G車聯網中的通感算融合旨在增強資源互通,實現按需資源調配。通過通算融合感知,提供先驗信息,實現資源互通;感知融合通算,擴展感知深度,實現感知增強。通感算融合可實現網絡資源協作增強,是車聯網未來的研究趨勢。
4.2 6G車聯網中的通感算融合的應用
6G車聯網中的通感算融合有望將先進的感知資源、通信資源和計算資源集成運用于整個智能交通系統,有效解決無限需求與有限資源之間產生的矛盾沖突,增強系統的可靠性、高效性及時效性,在自動駕駛、數字孿生、編隊控制、安全可信等領域具有越來越廣泛的應用。
自動駕駛促進更高級別的自動駕駛的發展與大規模落地,結合6G空天地一體化通信技術實現全域覆蓋,拓展自動駕駛車輛的通信寬度,利用通信感知集成技術實現駕駛過程中的感知增強,端-邊-云協同的計算網絡增強人工智能使能的實時決策,實現安全可靠的無人駕駛技術。
數字孿生6G推進實現物理世界和數字世界的交互,太赫茲通信技術和光通信技術提供超低延遲、超高容量的數據傳輸,實現智慧化的交通決策與管理。
編隊控制6G車聯網中的通感算融合將促進編隊狀態更新速率,結合通信可靠性增強與時延降低,為車輛編隊行駛提供更可靠的保證。
安全可信區塊鏈能夠為車聯網信息數據提供安全保障,6G中支持區塊鏈的分布式網絡架構可進一步提高信息安全,實現安全可信的信息共享。
4.3 面臨的挑戰
6G車聯網中的通感算融合旨在將感知資源、通信資源、計算資源有效集成,滿足各種新興應用對極高可靠性、極低時延的需求。但是,實現感知-通信-計算的有機融合將面臨以下技術挑戰。
異構環境下的需求保障車聯網中存在海量業務需求,對需求進行分析與解耦可實現更可靠的資源分配決策,高效處理網絡中的海量異構業務需求。
安全可信的數據共享自動駕駛在行駛過程中不斷地收集信息來制定相應的駕駛決策,保證駕駛安全,因此激勵更多的車輛用戶參與信息共享是保障安全行駛的關鍵。因此,如何設置信息的共享機制來保障用戶的隱私安全,實現安全可信的數據共享是亟需解決的難題。
通感算資源的相互制約與耦合關系理論研究通過分析通感算資源的內在沖突與權衡,可以有效促進資源的高效利用,保障安全可靠的自動駕駛。但目前研究欠缺關于通感算資源的相互制約與耦合關系理論研究。
智能的通感算資源調度如何設計高效的自適應通感算資源調度決策,實現業務需求與資源的高度匹配,提高網絡資源利用率,平衡有限的資源與海量需求之間的矛盾,是需要解決的難題。人工智能技術由于其智能化的計算特性,可有效輔助實現高效的感知-通信-計算資源調度策略。
5 結束語
隨著車聯網中通信和計算技術的迅速發展,通信-計算融合因其帶來的巨大協作增益而備受關注。但隨著無人駕駛的發展,其難以滿足車輛對高可靠低時延的極致需求。而6G車聯網中的感知-通信-計算融合有望實現超低時延、超高可靠、超高速率、高精度感知和廣泛覆蓋的要求,在智能交通領域具有廣泛的發展前景。首先,回顧了車聯網中通信和計算技術的發展;其次,針對車聯網中通信-計算融合的系統架構和關鍵技術兩個方向對相關工作進行了回顧總結,分別從基于任務執行的通信-計算融合、結合區塊鏈的網絡安全的通信-計算資源融合、基于網絡有限資源的聯合通信-計算資源分配三個方面對現有的通信-計算融合關鍵技術進行了綜述;最后,提出了6G車聯網中的通感算融合在未來的研究方向與面臨的挑戰。本文通過對車聯網通信-計算融合已有研究成果的綜述,進一步提出對6G車聯網中的通感算融合的未來展望,為相關領域研究人員對車聯網通信-計算融合和感知-通信-計算融合的研究提供參考和幫助。
猜你喜歡
江蘇安全生產(2023年1期)2023-02-08 05:58:38
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
吉林廣播電視大學學報(2021年4期)2022-01-14 02:35:48
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
作文成功之路·小學版(2020年5期)2020-06-11 12:48:26
小天使·一年級語數英綜合(2018年11期)2018-11-23 09:47:26