MATLAB在直流調速系統教學中的應用
2023-02-09 08:05:14王麟珠戴立慶
科技風 2023年2期
王麟珠 戴立慶
福建船政交通職業學院 福建福州 350007
在軋鋼機、挖掘機、金屬切削機床等電力拖動系統中,直流電動機不僅具有良好的啟動和制動性能,而且兼具大范圍內的平滑調速等特點,應用領域極其廣泛。而交流調速系統的研究又是以直流調速系統為基礎的,因此,在自動調速系統中,直流調速系統具有不可替代的作用。
直流調速系統課程綜合性較強,要求學生具備“自動控制原理”“電力電子技術”“電力拖動基礎”等專業課程的基礎知識,因此,在教學過程中,教師授課難度大,學生接受效果差。將MATLAB軟件應用于直流調速系統課程的教學中,不僅可以使抽象知識形象化,有利于學生對知識的吸收,而且便于分析各參數對系統的影響。與采用實驗臺進行實驗相比較,軟件仿真更容易進行參數設置與調試,可以觀察到動態過程中參數的變化,且易于故障分析和排除,并能夠進行線上教學。在傳統理論教學和實驗教學相結合的基礎上,改進課程教學模式,采用“三位一體”的教學模式,即課堂理論知識講解、軟件模擬仿真、實驗臺實物接線調試,能夠使學生更加深入地理解直流調速系統工作原理,增強學生分析問題的能力,鍛煉學生實踐動手能力。
1 開環直流調速系統
直流電動機的轉速方程式為:
式中:n為轉速,U為電樞電壓,I為電樞電流,R為電樞回路總電阻,Ke為電動勢系數,Φ為勵磁磁通。
從轉速方程式可知,調節電樞電壓可以實現對電動機的調速,這也是最常用的調速方法。開環直流調速系統是最簡單的調速系統,由主電路和控制電路兩大部分組成,主電路部分有三相交流電源、晶閘管整流橋、平波電抗器、直流電動機,控制電路由給定電壓和脈沖觸發電路組成。
運用MATLAB/Simulink/simPowerSystems進行電氣元件建模仿真,圖1所示為開環直流調速系統仿真模型。建立電氣元件模塊仿真模型的過程,相當于學生進行了虛擬仿真接線,也讓學生明白在實驗臺實驗過程中的接線步驟和注意事項,加深學生對系統結構和工作原理的理解。

圖1 開環直流調速系統仿真模型
由于開環直流調速系統的機械特性軟,無法滿足生產機械對調速系統的性能指標要求,為提高直流調速系統的機械特性硬度,可引入單閉環直流調速系統。
2 單閉環直流調速系統
與開環調速系統相比較,保持主電路不變,控制電路增加了轉速檢測、比較和轉速調節器,就可完成單閉環直流調速系統的構建,原理框圖如圖2所示。通過對直流電動機的實際轉速進行檢測,將實際轉速和期望轉速做比較,采用轉速調節器對系統進行調節,實現單閉環系統的自動調節功能。
2.1 有靜差直流調速系統
在單閉環直流調速系統中,當轉速調節器為比例調節器(即P調節器)時,系統為有靜差直流調速系統,即系統自動調節進入穩態后,實際轉速值和期望轉速值存在一個差值,圖2所示為單閉環有靜差直流調速系統組成框圖。與開環系統相比,單閉環系統具有靜特性硬和靜差率小的特點,并且調速范圍和抗干擾能力得到有效提高。系統對前向通道上的擾動(如電網電壓波動、負載變化等)能起到有效抑制作用,在軟件仿真時,可實現在任意環節加上干擾信號,進而對系統抗干擾性能進行分析。

圖2 單閉環有靜差直流調速系統組成框圖
2.2 無靜差直流調速系統
為了使系統達到實際轉速值與期望轉速值一致,采用比例積分調節器(即PI調節器)取代單閉環有靜差直流調速系統中的比例調節器,這一系統即為無靜差直流調速系統。與有靜差系統相比,無靜差系統增加了積分調節作用,積分調節器可使系統實現無靜差恒速穩定運行,但由于積分調節為滯后環節,會大大降低系統響應的快速性,因此,采用比例積分調節器,綜合比例控制滿足快速性要求和積分控制滿足準確性要求的優點。仿真時,通過改變PI調節器Kp、Ki兩個系數的大小,可觀察兩個參數對系統的影響,匹配出最優參數,以便實驗臺實驗使用。采用軟件仿真,參數修改快捷簡便,可細致觀察系統響應曲線,能有效提高實驗效率。
2.3 帶電流截止負反饋的無靜差直流調速系統
直流電動機在啟動過程中會形成過大的沖擊電流,損壞過載能力低的晶閘管,此外,部分生產機械的電動機在工作過程中可能會遭遇堵轉狀況,因此,在無靜差調速系統的基礎上增加電流截止負反饋環節。當電樞電流在正常范圍工作時,電流截止負反饋未啟動,此時系統就是無靜差調速系統;當電樞電流超過允許值時,電流截止負反饋環節將電流反饋信號送至比較器,通過閉環系統的自動調節功能,達到有效降低電樞電流的目的。
3 雙閉環直流調速系統
雖然帶電流截止負反饋的無靜差調速系統實現了無靜差調速和限制過大電流,但同時也使電動機啟動時的電流受限,因此影響了電動機啟動的快速性。為解決這一問題,在單閉環系統的基礎上增加電流檢測器和電流調節器,構成雙閉環直流調速系統,即系統具有轉速負反饋外環和電流負反饋內環兩個閉環。在雙閉環系統中,轉速調節器和電流調節器均采用PI調節器。在啟動過程中,轉速調節器很快進入飽和狀態,輸出達到最大限幅值,該限幅值即為電流環的給定值,電流負反饋發揮調節作用,使電流保持最大值,轉速以最快速度增大達到目標值;當轉速出現超調,轉速調節器得以退飽和,轉速負反饋外環發揮閉環調節作用,電流環跟隨轉速環調節;系統進入穩態后,轉速達到目標值,實現轉速無靜差,電樞電流與負載電流相等,電磁轉矩與負載轉矩平衡。雙閉環調速系統達到了穩定性、準確性和快速性的控制要求,但在啟動過程中,轉速會出現超調,為了解決這一問題,可通過增加一個轉速微分負反饋,實現轉速超調的抑制。
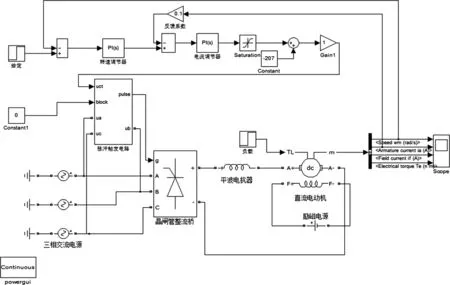
圖3 雙閉環直流系統仿真模型
圖3所示為基于MATLAB的雙閉環系統仿真模型,運用MATLAB軟件便于觀察系統動態調節過程中各參數的變化情況,通過調節轉速調節器和電流調節器的Kp、Ki參數,學生可以總結出兩個調節器對系統的影響。通過對轉速微分負反饋參數的調節,可匹配出最優參數使系統達到最佳性能指標。通過對轉速反饋線接反或反饋線突然斷線等各種故障情況的仿真,學生能夠較容易觀察出系統各環節及參數的變化情況,對在實驗臺實驗過程中的排故有了充分的經驗積累,使學生在實驗臺實驗前做到心中有數、輕松應對。

圖4 各系統轉速響應曲線
圖4為各系統的轉速響應曲線,從曲線中可以看出,單閉環有靜差系統、單閉環無靜差系統、雙閉環系統是直流調速系統的不斷改進過程,使直流調速系統不僅具有良好的啟動特性和抗干擾能力,而且穩態性能好,可以達到工業生產機械的性能指標要求。
4 雙閉環可逆直流調速系統
4.1 有環流可逆調速系統
雙閉環直流調速系統已能夠較好地滿足性能指標要求,但由于晶閘管的單向導電性,主電路只有一組晶閘管整流裝置,只能提供單方向的電流,因此,無法實現電機的可逆運行,即電機無法實現正反轉切換和制動。因此,主電路需要采用正反兩組晶閘管整流裝置,正組晶閘管整流裝置提供正向電流,反組晶閘管整流裝置提供反向電流。通過對兩組晶閘管整流裝置控制角的調節,可實現晶閘管裝置處于整流或逆變狀態,從而實現電機四象限運行。
由于主電路回路采用了兩組晶閘管整流裝置,因此,電路中存在環流問題,即使控制回路在雙閉環控制的基礎上加上配合控制,也只能消除直流平均環流,無法消除瞬時脈動環流。為此,主電路回路必須串入環流電抗器,以抑制脈動環流。
4.2 無環流可逆調速系統
為徹底消除可逆直流調速系統中的環流,在雙閉環控制回路中增加無環流邏輯控制器,通過對電機四象限運行的分析,可知處于工作狀態的晶閘管裝置只有一組,無環流邏輯控制器開放處于工作狀態的晶閘管裝置觸發脈沖,封鎖另一組處于待工作狀態的晶閘管裝置觸發脈沖,從而切斷環流回路,實現無環流控制,主電路回路也就不再需要串入環流電抗器,圖5所示為邏輯無環流可逆調速系統仿真模型。
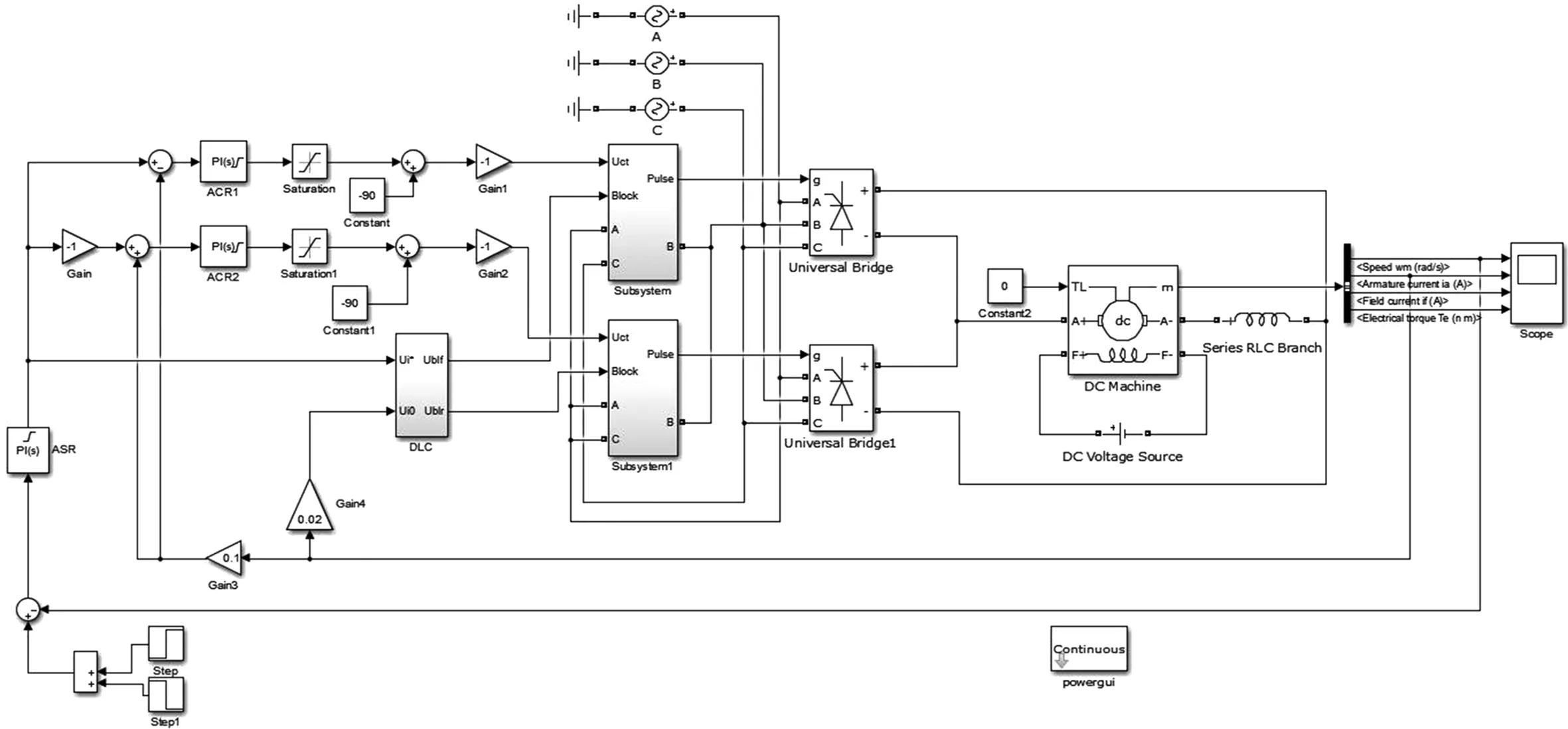
圖5 無環流可逆直流調速系統仿真模型
結語
本文針對開環直流調速系統存在機械特性軟的問題,引入單閉環系統。對單閉環系統啟動快速性不足問題,引入雙閉環調速系統,實現滿足調速范圍大、靜差率低等性能指標要求的直流調速系統。為實現電機可逆運行,主電路采用兩組晶閘管裝置。為消除可逆系統中的環流,在控制回路增加無環流邏輯控制器,最終實現雙閉環控制的無環流可逆直流調速系統。將直流調速系統課程由簡單到復雜進行剖析,建立各系統間有機統一體的關系,使學生更加系統性地掌握直流調速系統的知識點。同時,運用MATLAB軟件進行建模仿真,通過仿真模型的搭建,學生可以更好地掌握系統的組成原理;通過對比各系統的轉速響應曲線,學生可以直觀地看出系統得到了一步步的改善;通過對各種故障情況模擬仿真,學生能夠更加快速地對故障情況進行分析和排查,結合“三位一體”的教學模式,教學效果得到有效改善。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
作文大王·笑話大王(2021年4期)2021-04-26 19:00:35
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
電影(2018年9期)2018-11-14 06:57:21
作文世界(小學版)(2018年4期)2018-10-16 17:13:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
快樂作文·低年級(2016年12期)2017-01-03 20:52:44
