智能膝關節功能鍛煉設備的研究與設計
2023-02-08 08:45:08陳皓宇趙東亮李娜
醫療裝備 2023年1期
陳皓宇,趙東亮,李娜
河南省洛陽正骨醫院(河南省骨科醫院)生物醫學工程研究室 (河南洛陽 471000)
膝關節骨性關節炎(Knee Osteoarthritis,KOA)是一種以膝關節軟骨的骨質增生、破壞、變性及關節邊緣有骨贅形成等為特征的慢性關節病,臨床以關節僵硬、活動不便等為常見特征[1]。根據流行病學調查結果顯示,我國60 歲以上老人中的49%以上都患有膝關節骨性關節炎,隨著人口老齡化進程的加快,該病的患病率不斷增加[2]。現階段骨性關節病的治療方法主要包括藥物治療、物理治療及手術置換關節等。但是藥物治療副作用較大,不宜長期應用;手術治療則導致患者創傷較大[3]。功能鍛煉是通過肢體活動來預防、治療某些損傷性疾病,有助于機體功能恢復的一種方法,常被用于現代康復醫學中[4]。功能鍛煉通過增大膝關節的活動范圍,有助于膝關節軟骨滑膜液的擴散和滲透,消除膝關節周圍組織粘連,增強膝關節的代償能力與穩定性,預防肌肉萎縮,提高患者的行為能力[5]。
目前,骨科功能鍛煉主要依靠醫師指導與患者自行訓練,整個過程缺乏精確性與規范化,很難達到預期效果。本研究分析了市場上現有的膝關節康復鍛煉設備,并在本院專家、教授的長期臨床治療經驗的指導下,設計了一種關于膝關節主動與被動模式的功能鍛煉設備。該設備的主要設計技術思路為:通過減速步進電機、磁粉制動器、電磁離合器、角度傳感器及MCU Stm32 芯片等,實現智能化主動與被動模式的功能鍛煉,以及模式之間的自由切換與治療參數的精準設置等功能。
1 膝關節功能鍛煉設備的研究與設計
1.1 膝關節功能鍛煉設備的理論研究
該膝關節功能鍛煉設備通過對患者膝關節進行輔助性鍛煉,達到對膝關節及其周圍組織肌肉功能治療的目的,因此在該膝關節功能鍛煉設備的設計研究初期,需要確定膝關節功能鍛煉的治療模式及相應的受力、時間、角度范圍和角速度等指標,同時對上述指標的控制理論進行分析研究。
1.1.1 膝關節功能的治療模式及相關參數
當前研究表明,膝關節功能鍛煉的體位主要包括坐位鍛煉、仰臥位鍛煉、俯臥位鍛煉和站立位鍛煉等,其中站立位鍛煉需要患者具有足夠的力量與平衡保持能力,不適合膝關節病變較為嚴重的患者。數據統計分析及對照試驗表明,患者膝關節功能鍛煉的效果與每日鍛煉組數、每組鍛煉次數、每次鍛煉時長均有密切關系。結合以上試驗結論與臨床功能鍛煉經驗的調研,定義該設備的鍛煉組數與次數,均可在0~30 次范圍內任意設定,單次鍛煉保持時長可在3~10 s 內任意設定,膝關節被動鍛煉角速度可在0~5 °/s 內任意設定[8-12]。
1.1.2 膝關節功能鍛煉動力與阻力的產生
該膝關節功能鍛煉設備通過控制驅動器與電磁離合器的工作模式,實現設備輸出動力或阻力模式的切換。動力部分由220 V 減速步進電機提供,通過減速步進電機自身減速比與蝸輪、蝸桿實現輸出扭矩的放大,提供足夠的驅動力;阻力部分由磁粉制動器提供,磁粉制動器產生的阻力扭矩主要取決于輸入磁粉制動器的激磁電流的大小。磁粉制動器由傳動單元(輸入軸)和從動單元(輸出軸)合并而成。兩組單元之間的空間填有粒狀的磁粉(體積大約 40 μm3)。當磁性線圈不導電時,扭矩不會從傳動軸傳于從動軸,但如將線圈電磁通電,就會因磁力的作用而吸引磁粉產生硬化現象,在連續滑動之間會把扭矩傳達。而其扭矩與激磁電流存在線性關系,即可通過調整激磁電流大小改變磁粉制動器輸出的扭矩[11]。
膝關節功能鍛煉設備的活動搖臂提供阻力的計算公式如下:
式中F為活動搖臂提供給患者的阻力,單位為N;M為磁粉制動器輸出的扭矩,單位為N·m;L則為患者踝關節與膝關節的有效距離,單位為m。
1.2 膝關節功能鍛煉設備的結構設計
該設備主要由躺椅、腳輪、扶手和控制箱等部件組成。躺椅為設備主體;控制箱位于躺椅的坐墊下方;腳輪分別安裝在躺椅底盤的4 個角,實現設備的支撐及自由移動功能;扶手安裝在躺椅靠背兩側,既可在患者接受治療時供其支撐與扶靠,又可方便設備移動時的推拉。
躺椅外觀類似于普通座椅,靠背設計為可調節式,支撐角度可以根據患者需求或治療要求進行調整,必要時可將靠背調整至與坐墊水平,便于仰臥或俯臥體位的治療需求。活動搖臂的轉軸,使其與躺椅坐墊的前端固定,控制、調整活動搖臂與坐墊的夾角并保持該角度。根據不同的治療需求,亦可以控制活動搖臂進行繞軸運動,并調節其繞軸的角速度、提供的力矩,循環運動次數及活動搖臂的角度保持時間,實現各類簡單或復雜的功能鍛煉動作。活動搖臂兩側的末端分別設有兩個接口,用于安裝踝支撐桿或其他種類的固定夾具。
控制箱作為該設備的核心部分,內部裝有減速步進電機、蝸輪、蝸桿、電磁離合器、磁粉制動器、同步帶輪組、活動搖臂及其他零件。具體實現方法如下:減速步進電機的輸出軸安裝蝸桿,蝸輪與蝸桿相互嚙合,蝸輪內孔裝有光軸1;光軸1 的一端通過軸承支座固定在箱體內壁,另一端則固定在電磁離合器的主動軸側內孔;電磁離合器的從動軸側內孔安裝光軸2,光軸2 通過同步帶輪內孔后嵌入磁粉制動器內孔;其余兩只同步帶輪則分別安裝于活動搖臂的轉軸和角度測量結構的轉軸上;角度測量結構中的同步帶輪內孔安裝有光軸3,光軸3 的兩端均安裝于光軸軸承套的內孔,兩只光軸軸承套安裝于固定支撐板,且能夠進行垂直方向的移動,光軸3 的其中一端與角度傳感器通過聯軸器相連,如圖1 所示。
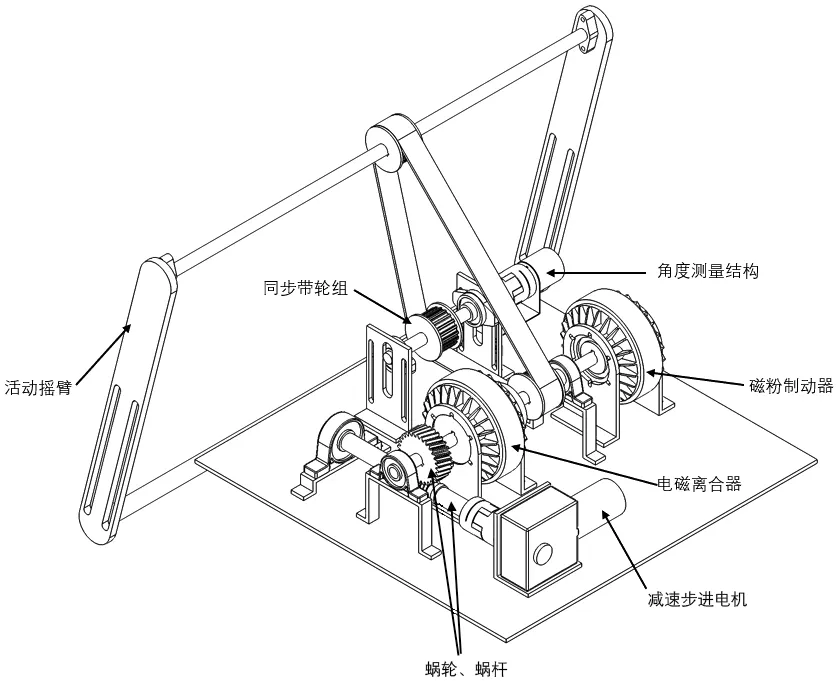
圖1 機械結構主要部分示意圖
1.3 膝關節功能鍛煉設備的控制原理
軟件控制主MCU Stm32 芯片通過PWM 端口的脈寬調制輸出不同的PWM 波,驅動器通過接收到的PWM 的占空比進行減速步進電機的轉速控制。驅動器與減速步進電機之間是轉速、電流雙閉環的邏輯無環流控制,這就保證了減速步進電機速度控制的精確性和穩定性[12],如圖2 所示。

圖2 減速步進電機控制圖
軟件控制主MCU Stm32 芯片的DAC 單元模式輸出DAC 信號,DAC 信號控制電流控制單元,電流控制單元通過DAC 電壓信號的高低輸出不同的電流,以控制磁粉制動器,進而產生不同大小的阻力,如圖3 所示。

圖3 磁粉制動器控制圖
1.4 膝關節功能鍛煉設備的主程序控制流程圖
該設備的主控程序如圖4 所示,其過程控制邏輯如下。(1)開始運行時,主控電路板根據操作者的選擇判定電磁離合器是否吸合。(2)若電磁離合器進行吸合,則減速步進電機啟動,并正向旋轉;同時程序內置計時器啟動倒計時;此時角度傳感器每間隔0.1 s 都會進行一次角度判定,若判定角度達到所設定的角度值,則驅動器發出反轉信號并驅動減速步進電機進行反轉,若判定角度未達到所設定角度值,則減速步進電機保持當前運動狀態繼續運行,直至計時器倒計時完畢,驅動器發出信號結束減速步進電機的運行過程并使其復位。(3)若電磁離合器未吸合,則磁粉制動器得電,主控電路板根據操作者設定的阻力值將其轉化為DAC信號,并使電流控制單元控制磁粉制動器即時的輸入電流;當活動搖臂被外力驅動時,角度傳感器每間隔0.1 s 進行一次角度判定,若判定角度達到設定的角度值,則計時器啟動倒計時,并在倒計時結束后使磁粉制動器復位,若判定角度未達到設定的角度值,則計時器不啟動,直至活動搖臂被外力驅動至設定的角度。
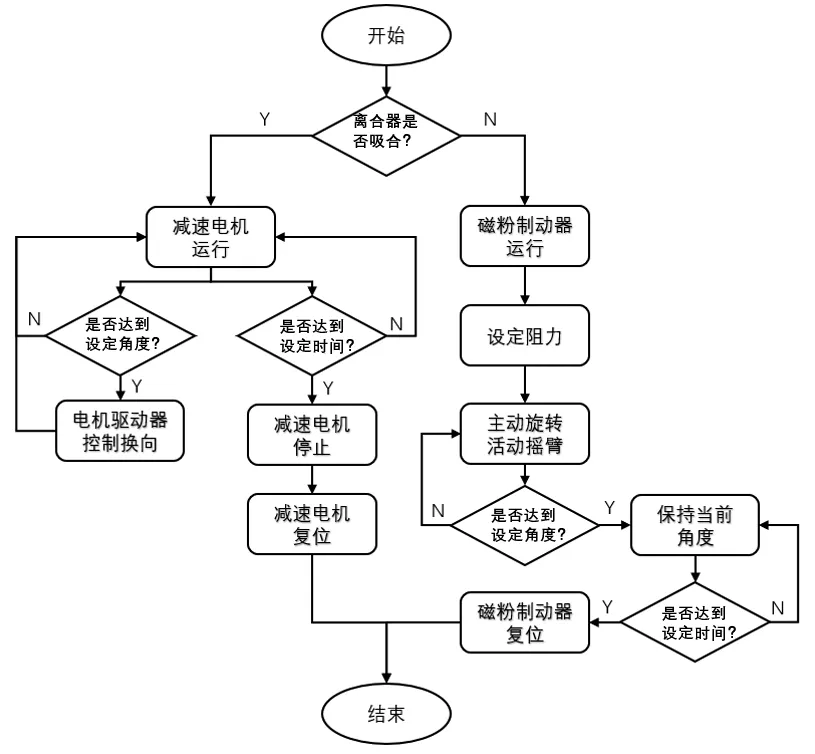
圖4 主程序控制流程圖
1.5 設備相關的技術參數
該設備的主要技術參數指標如下:(1)活動搖臂的主動旋轉速度調節范圍為0 ~5°/s;(2)活動搖臂的旋轉活動范圍為-90°~150°(設活動搖臂處于水平狀態為0°);(3)功能鍛煉持續時間調節范圍為0 ~99 min;(4)功能鍛煉單組運動循環次數調節范圍為0 ~30 次;(5)活動搖臂提供的阻力范圍為0 ~15 kgf;(6)單次功能鍛煉的保持時長調節范圍為3 ~10 s。以上所述參數需根據功能鍛煉模式與或患者的實際情況自行設定。
2 試驗驗證
2.1 試驗方法
2.1.1 阻力精準度試驗
設活動搖臂的初始角度為-90°,通過緊固件將NK-200 型數顯式拉壓力計安裝在踝關節支撐桿上,拉壓力計與活動搖臂呈垂直狀態,并使用拉壓力計對抗活動搖臂的轉動,模擬治療過程,實驗設定阻力值為8 kgf,進行5 次循環,保持時長為程序預設定的8 s,通過拉壓力計的上位機軟件記錄功能鍛煉過程并生成數據記錄。
2.1.2 角度范圍與角速度精準度試驗
設活動搖臂的初始角度為-90°,并設定終點為0°,進行10 次功能鍛煉,活動搖臂的角速度,設定減速電動機的轉速使其工作在3°/s,通過讀取秒表與上位機軟件的數據,記錄鍛煉過程并生成數據記錄。
2.2 試驗結果
阻力精準度實驗數據如表1 所示,角度范圍與角速度精準度實驗數據如表2 所示。

表1 8 kgf 的力值與持續時間

表2 3°/s 的角度行程與運行時間
2.3 試驗結論
在阻力精度實驗中,力值持續時間都處于相對穩定的水平,單次誤差最大為0.1 s,平均誤差為0.02 s,單次最大誤差百分比為1.25%。在阻力保持時間段內,當設定阻力值為8 kgf 時,真實阻力值的平均值為7.8498 kgf,誤差為1.88%,單次最大誤差為3%。在角度范圍與角速度精準度實驗中,當活動搖臂以3°/s 運行時,其真實平均速度為3.009°/s,誤差為0.3%;單次最大過沖角度為0.9°,誤差為1%。實驗結果基本符合設計預期。
3 結語
綜上所述,該設備以運動醫學、康復醫學為理論基礎,結合骨科康復臨床需求,運用精密機械設計、人工智能自動化控制技術與PWM、PID 等現代控制理論與方法,研制一種集多功能、關節活動度與靈活性訓練于一體的智能化膝關節功能鍛煉設備,且實現智能化、數字化,顯著提高功能鍛煉的效果。該項目的實施不但為膝關節骨性關節炎提供一種安全有效且無副作用的綠色治療手段,而且為功能鍛煉療法的推廣應用奠定了基礎,還可明顯減少醫護人員勞動強度、提升工作效率、節省勞動力成本,具有廣闊的市場前景,同時可創造更大的社會效益。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
中國特種設備安全(2022年6期)2022-09-20 02:52:28
少先隊活動(2022年5期)2022-06-06 03:45:04
家庭科學·新健康(2022年3期)2022-05-10 00:32:13
中老年保健(2021年2期)2021-08-22 07:31:10
電子制作(2018年11期)2018-08-04 03:26:08
海峽姐妹(2018年3期)2018-05-09 08:20:40
中國科技論壇(2017年7期)2017-07-25 08:49:53
工業設計(2016年12期)2016-04-16 02:52:00
消費者報道(2014年7期)2014-07-31 11:23:57
